Double Directional Channel Characterization on Board Ships
Texte intégral
Figure
Documents relatifs
It was shown that this device could improve the quality of a digital communication by using the polarization of the incoming waves as element of decorrelation and that the
The object of the present paper is to extend the spatial correlation model to the case where the mean of the corre- lation is known (e.g. from measurements, or because it is
Keywords: Safety; Vehicular Ad Hoc Networks; Platoons; VANETs; Automated Vehicles; Time-Bounded and Reliable Wireless Mobile Communications; Directional Antennas; String Control.. 1
The continuous random network model proposed by Polk and Turnbull to describe the amorphous Germanium structure has been one of the most successful result of
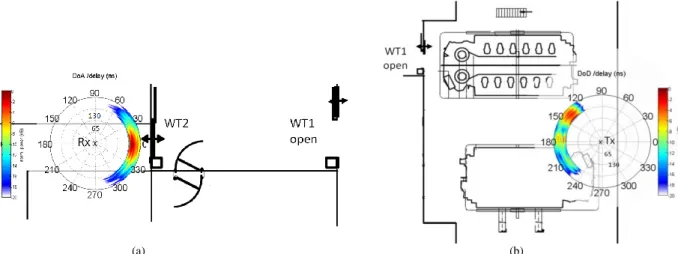
Such measurements contain a large amount of information. To present some examples, the most important parameters were gathered on a single page. Some explanations are useful
Further- more, the average eigenvalues associated with level A are lower than those for the other levels for the entrance hall environment ( at 50% for level A, versus
Lorsque le coordinateur racine distribué reçoit une demande d’autorisation de traitement d’un événement local d’un coordinateur local dont la date actuelle est
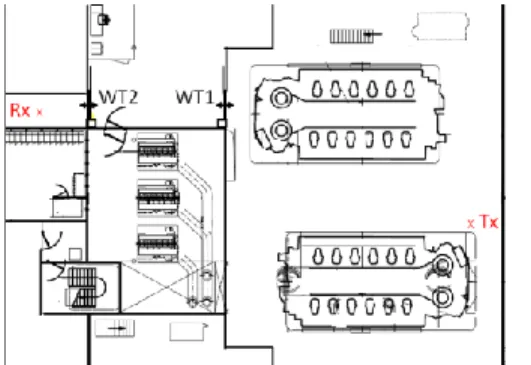
Measurement results at Rx2 and Rx3 show that the received power increases when the Rx is located near stairways which may be sources of radio leakage between the two adjacent
