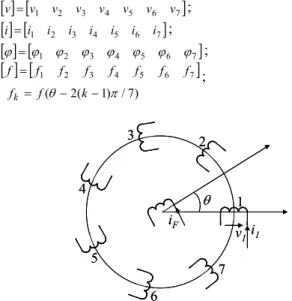
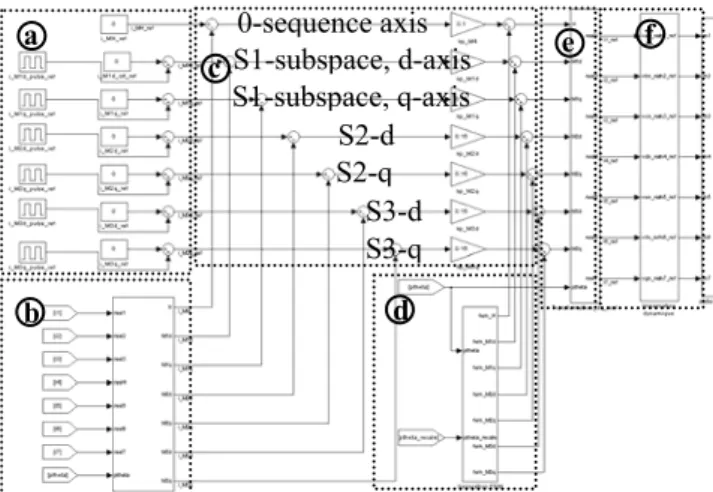
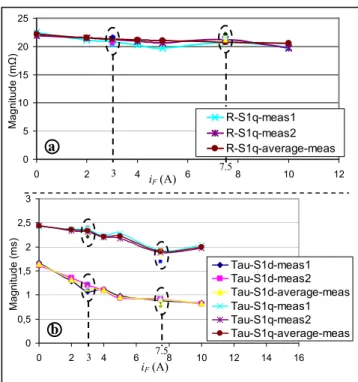
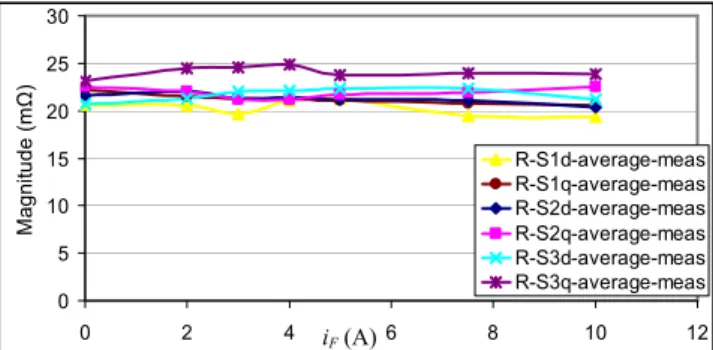
Identification of sensitive R-L parameters of a Multi-phase drive by a vector control
Texte intégral
Figure
Documents relatifs
(ii) Secondly, when using analytical expressions of virial coef- ficients, the radius of convergence of the series has to be calculated in order to deduce the volume range on which
We also define tropical open Hurwitz numbers, and establish a correspondence with their complex counterpart. This can simply be seen as a translation in the tropical language of
Biham , \Two practical and provably secure block ciphers: BEAR and LION." Proceedings of the 3rd Fast Software Encryption Workshop, Lecture Notes in Computer Science Vol...
To better understand the impact of these high-order waves on the signal power during the amplification process, we plot the evolution of the output signal power versus the fiber
However, in addition to a “raw” translation from Alloy to Coq, we wanted our tool to provide some support to ease the proof in Coq of the assertions of an Alloy model.. Such a
As our bisection-Newton method can efficiently solve each subproblem (6.4), it seems that the matrix-splitting method, equipped with our bisection- Newton algorithm, is an
By adapting a standard technique in several complex variables in [18] to the case of DQ-modules, proving the coherence of a DQ-module amounts to proving the coherence of the
Chronic osteomyelitis treatment is complex, due to the difficulty to achieve therapeutic drug levels at the site of infection by systemic administration.. Our objective was to
