Élaboration d'une méthode d'extraction de plans par
croissance de régions dans un nuage de points
bathymétriques servant à alimenter des estimateurs
d'erreur hydrographique
Mémoire
Vincent Dupont
Maîtrise en sciences géomatiques - avec mémoire
Maître ès sciences (M. Sc.)
Élaboration d’une méthode d’extraction de plans par
croissance de régions dans un nuage de points
bathymétriques servant à alimenter des estimateurs
d’erreur hydrographique
Mémoire
Vincent Dupont
Sous la direction de:
Sylvie Daniel Ph.D., ing., directrice de recherche Christian Larouche Ph.D., codirecteur de recherche
Résumé
En hydrographie, la bathymétrie est une technique de mesure permettant de visualiser le relief du fond de l’eau en créant un nuage de points 3D où chacun des points de sonde est géoréférencé dans un référentiel global tridimensionnel. Pour ce faire, une vedette hydrogra-phique est équipée d’un SONAR, d’une centrale inertielle et d’un GNSS. Cependant, plusieurs sources d’incertitudes viennent altérer la qualité des points de sonde mesurés. C’est pourquoi, plusieurs efforts de recherche actuels visent l’élaboration d’estimateurs d’erreur permettant de détecter et de quantifier certaines erreurs systématiques en bathymétrie. Dans le contexte des ASV (Autonomous Surface Vehicles) ou véhicules autonomes de surface, ces estimateurs d’erreur ont pour but de rendre plus robustes les levés réalisés par ce type de véhicule, car les données acquises peuvent être validées en temps quasi-réel avant que le véhicule retourne à terre. Ceci permet d’assurer que les données respectent les spécifications demandées du levé hydrographique. Traditionnellement, de tels estimateurs d’erreur doivent être appliqués dans la zone de recouvrement d’au moins deux lignes de levé et représentant une région plane (i.e. un fond plat ou en pente). Ceci permet de vérifier la présence et la grandeur du biais de positionnement sur cette surface. Par ailleurs, de telles surfaces planes sont aussi d’intérêt pour la calibration automatique des systèmes d’acquisition bathymétrique. En effet, des plans sont nécessaires pour calculer les angles de visée entre la centrale inertielle et le sonar mul-tifaisceaux. L’objectif de ce projet de maîtrise est d’élaborer une méthode robuste et fiable d’extraction de plans par croissance de régions dans un nuage de points bathymétriques. La solution élaborée permet d’obtenir la position et les paramètres des régions planes ainsi que leur qualité. Elle a été testée et validée avec différents jeux de données présentant une variété de morphologie du fond marin.
Abstract
In hydrography, bathymetry is a measurement technique used to visualize the relief of the seabed by creating a 3D point cloud where each of the sounding points is georeferenced in a global three-dimensional reference frame. To do so, a hydrographic vessel is equipped with a SONAR, an inertial measurement unit (IMU) and a GNSS. However, several sources of uncertainty affect the quality of the measured sounding points. Therefore, current research efforts aim to develop error estimators to detect and quantify environmental and systematic bathymetric errors. In the context of Autonomous Surface Vehicles (ASVs), these error es-timators aim to make the surveys more robust, since the data acquired can be validated in near real-time before the vehicle returns to the harbour. This ensures that the data meets the requested hydrographic survey specifications. Traditionally, such error estimators must be applied in the overlapping area of at least two survey lines and representing a flat region (i.e. a flat or slope bottom). On this surface, it is possible to check the presence and the mag-nitude of the positioning bias. Moreover, such flat surfaces are also of interest for automatic calibration of the bathymetric acquisition systems. Indeed, plans are needed to calculate the boresight angles between the inertial measurement unit and the multibeam sonar. The objective of this master’s project is to develop a robust and reliable method for extracting plans using region growing in a bathymetric point cloud. The developped solution provides the position and the parameters of the flat regions as well as their quality. It has been tested and validated with different datasets showing a variety of seabed morphology.
Table des matières
Résumé ii
Abstract iii
Table des matières iv
Liste des tableaux vi
Liste des figures vii
Remerciements xi Introduction 1 Mise en contexte . . . 1 Problématique . . . 3 Hypothèse . . . 10 Objectifs. . . 12 Méthodologie . . . 13 Structure du mémoire . . . 15
1 Revue des concepts 16 1.1 Algorithme CUBE . . . 16
1.2 Géomorphons et classification de la topographie . . . 19
1.3 Extraction des normales et courbures locales avec une ACP . . . 21
1.4 Calculer les paramètres d’une équation de plan avec une approche de com-pensation . . . 26
1.5 Synthèse du chapitre . . . 38
2 Méthode robuste d’extraction de plans CRAB 39 2.1 Description générale de la méthode . . . 39
2.2 Phase 1 : Segmentation de régions planes . . . 40
2.3 Phase 2 : Extraction de régions planes précises . . . 43
2.4 Architecture logiciel de l’outil . . . 49
3 Résultats et discussion 51 3.1 Méthode de validation . . . 51
3.2 Résultats intermédiaires de la méthode CRAB pour J1 . . . 55
3.3 Évaluation de la qualité des plans extraits . . . 57
3.5 Évaluation de l’efficacité . . . 67
3.6 Évaluation de la robustesse . . . 70
3.7 Discussion sur les résultats de la validation de la méthode CRAB . . . 71
Conclusion 75 Retour sur les objectifs de recherche . . . 75
Bilan du projet de recherche. . . 76
Contributions de la recherche . . . 79
Travaux futurs et perspectives. . . 80
Bibliographie 82 A Résultats supplémentaires 86 A.1 Résultats intermédiaires pour J2 . . . 86
A.2 Résultats intermédiaires pour J3 . . . 88
A.3 Résultats supplémentaires de la compensation . . . 89
A.4 Stabilisation des paramètres de géomorphon . . . 90
A.5 Comparaison entre l’ACP et l’ACP robuste . . . 97
Liste des tableaux
1.1 Résolution recommandée de la surface CUBE de base (SHC, 2012) . . . 18
3.1 Caractéristiques des trois jeux de données tests . . . 52
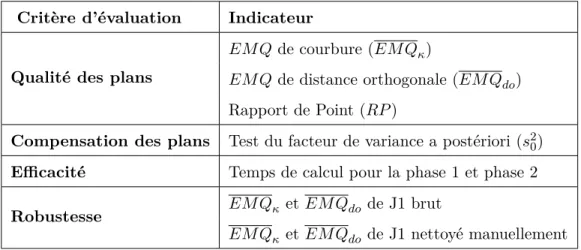
3.2 Critères et indicateurs de qualité de la méthode de validation . . . 54
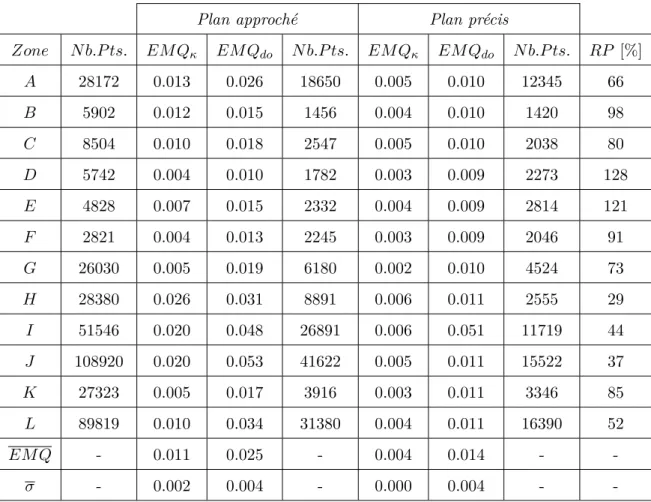
3.3 Indicateurs de qualité des plans pour J1 et seuils d’extraction utilisés : eps= 5◦, κs = 0.010 m−1, dos= 0.020 m . . . 57
3.4 Indicateurs de qualité des plans pour J2 et seuils d’extraction utilisés : eps = 10◦, κ s= 0.050 m−1, dos= 0.200 m. . . 59
3.5 Indicateurs de qualité des plans pour J3 et seuils d’extraction utilisés : eps = 10◦, κ s = 0.020 m−1, dos = 0.040 m. (∗) la zone C n’est pas incluse dans le calcul des EMQ et σ. . . . 62
3.6 Paramètre de plan précis, leur écart-type et le résultat du test de la compen-sation pour les zones tests de J1 . . . 65
3.7 Temps de traitement pour les étapes de la segmentation de plans approchés pour chacun des trois jeux de données . . . 67
3.8 Temps de traitement moyen en seconde par 10k points pour les étapes de l’ex-traction de plans approchés pour les trois jeux de données . . . 69
3.9 Comparaison des EMQ et leur écart-type σ pour la courbure et la distance orthogonale des jeux de données J1 brut et J1 nettoyé manuellement . . . 70
A.1 Résultats du test de la compensation pour toutes les zones de J1 . . . 89
A.2 Paramètres à stabiliser et leur valeur initiale . . . 90
Liste des figures
0.1 Exemple d’un ASV (Autonomous Surface Vehicles) - Photo personnel . . . 2
0.2 Démarche générale du projet de maîtrise . . . 14
1.1 Analyse du voisinage en regardant dans la direction des 8 voisins selon une dis-tance de recherche S. Figure extraite de la documentation officielle de GRASS GIS (GRASS Development Team, 2018) . . . 19
1.2 Concept de l’angle au zénith (φ), au nadir (ψ) et un exemple pour les directions nord ∆N et sud ∆S (Figure adaptée de Jasiewicz and Stepinski (2013)) . . . . 20
1.3 Les 10 types de géomorphons et la table d’identification de formes selon le nombre de +1 (colonne) et de -1 (ligne). Figure extraite de la documentation officielle de GRASS GIS (GRASS Development Team, 2018). . . 20
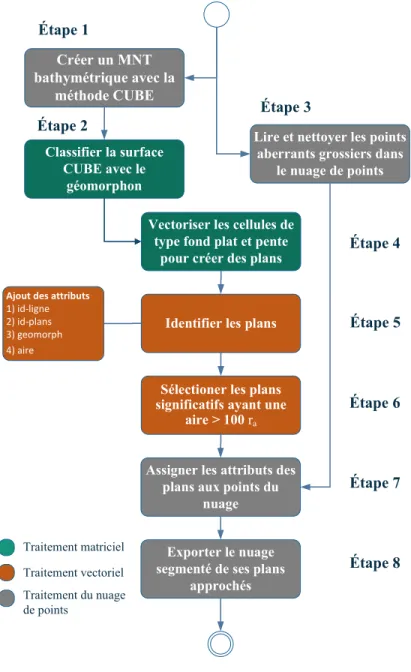
2.1 Méthode robuste d’extraction de plans CRAB . . . 39
2.2 Phase 1 : Segmentation des plans approchés avec la méthode du géomorphon . 40 2.3 Plan sous forme vectorielle (rouge) servant de pochoirs au points (noir) . . . . 42
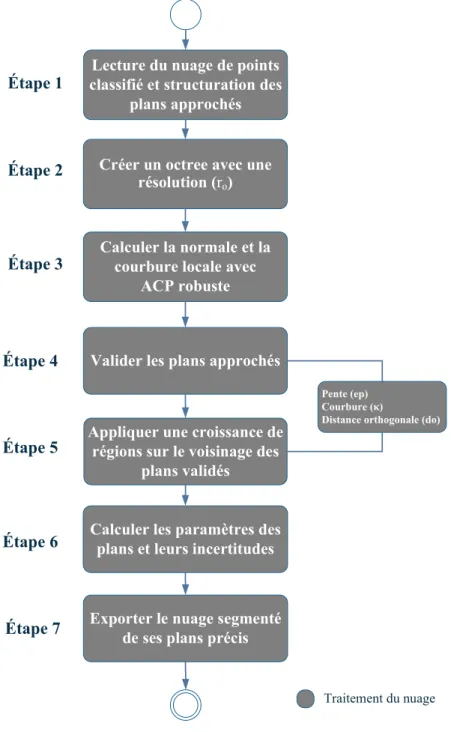
2.4 Phase 2 : Extraction des plans précis par croissance de régions . . . 43
2.5 Explication de l’octree . . . 44
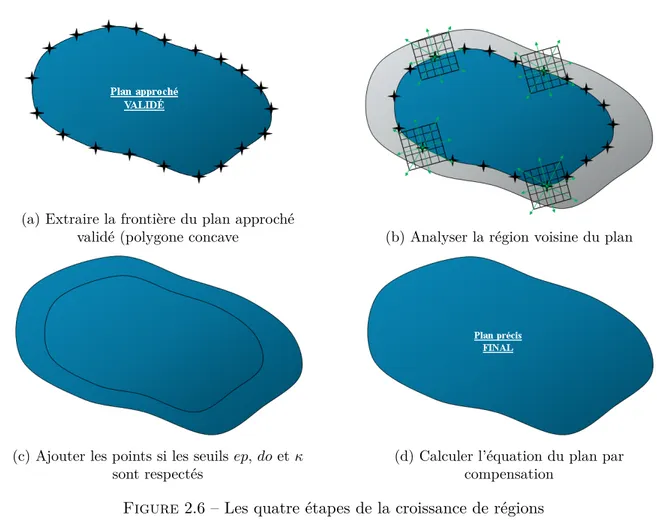
2.6 Les quatre étapes de la croissance de régions . . . 47
2.7 Analyse du voisinage . . . 47
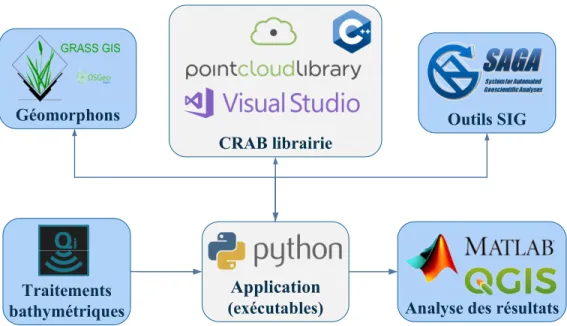
2.8 Architecture logiciel de l’outil CRAB . . . 49
3.1 Étapes de validation de la méthode CRAB . . . 53
3.2 Géomorphons pour J1 . . . 55
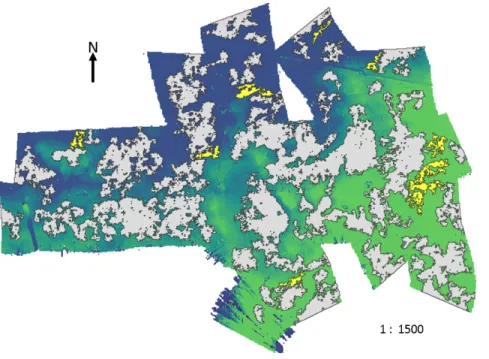
3.3 Plans approchés significatifs pour J1 . . . 56
3.4 Plans approchés significatifs et zones tests pour J1 . . . 56
3.5 Zone A vue de côté (J1).. . . 58
3.6 Zone B vue de haut (J2) . . . 60
3.7 Incohérence des profondeurs entre les 3 lignes de levé de la zone B. La sous-image b) est la vue de côté du cadre noir de la sous-sous-image a). . . 60
3.8 Zone D vue de haut (J2) . . . 61
3.9 Plan précis en jaune clair de la zone D et impact de dos . . . 61
3.10 Zone G vue de haut (J3). . . 63
3.11 Zone L vue de haut (J3) . . . 64
3.12 Écarts de profondeur entre les lignes de levé de la zone E (J3). Les trois lignes de levé sont de couleur rouge, bleu et vert. Les flèches montrent 2 niveaux de profondeur pour le fond. . . 64
3.13 Temps relatif moyen de la phase de segmentation de plans approchés pour les trois jeux de données . . . 68
3.14 Temps relatif moyen des étapes de la phase d’extraction de plans précis pour
les trois jeux de données . . . 69
3.15 Types de résultats possibles suite à la phase d’extraction des plans précis . . . 71
A.1 Géomorphons pour J2 . . . 86
A.2 Plans approchés significatifs pour J2 . . . 87
A.3 Plans approchés significatifs et zones tests pour J2 . . . 87
A.4 Géomorphons pour J3 . . . 88
A.5 Plans approchés significatifs pour J3 . . . 88
A.6 Plans approchés significatifs et zones tests pour J3 . . . 89
A.7 Impact de S sur le géomorphon . . . 91
A.8 Impact de SK sur le géomorphon . . . 92
A.9 Impact de F sur le géomorphon . . . 93
A.10 Impact de D sur le géomorphon . . . 94
A.11 Impact de E sur le géomorphon . . . 95
A.12 Erreur de pente absolue (eφ) en fonction du bruit en Z pour ACP-mg(bleu) et ACP-ma(rouge) ; le nombre de voisins était de 20 et le paramètre de la moyenne généralisée était p = 0.01 . . . 98
A.13 Erreur d’orientation absolue (eβ) en fonction du bruit en Z pour ACP-mg(bleu) et ACP-ma(rouge) ; le nombre de voisins était de 20 et le paramètre de la moyenne généralisée était p = 0.01 . . . 99
A.14 Erreur de courbure absolue (eκ) en fonction du bruit en Z pour ACP-mg(bleu) et ACP-ma(rouge) ; le nombre de voisins était de 20 et le paramètre de la moyenne généralisée était p = 0.01 . . . 99
A.15 Normales locales vues de haut et calculées avec ACP-mg(bleu) et ACP-ma(rouge) selon différents niveaux de bruit en Z ; le nombre de points total était de 250 ; le nombre de voisins était de 20 et le paramètre de la moyenne généralisée était p= 0.01 . . . 100
B.1 Étapes de traitement de l’outil d’extraction de plans CRAB . . . 106
Il faut trouver le juste équilibre entre les buts que l’on se fixe et les actes pour les réaliser.
Remerciements
Il est d’une grande importance pour moi de prendre le temps de remercier et de souligner la contribution de plusieurs personnes de mon entourage à la réalisation de ce projet de maîtrise. Tout d’abord, je souhaite remercier du plus fond du cœur ma directrice de recherche Madame Sylvie Daniel pour tout le travail qu’elle a consacré dans l’encadrement de mon projet. Le temps consacré à chaque semaine lors de nos rencontres d’avancement hebdomadaires m’a permis de rester aligné sur mes objectifs et d’avancer à un bon rythme pour accomplir dans les temps alloués mon projet. Vos commentaires autant dans nos réunions que nos communi-cations par écrit ont toujours été précis et ont eu pour effet d’élever la qualité de mon travail à un niveau supérieur. Il n’est pas facile d’apprendre à rédiger de manière efficace en science au-tant en français qu’en anglais. À chaque défi, vous avez été présente et d’une aide inestimable. Je voudrais aussi vous remercier de m’avoir proposer le défi d’aller à la conférence OCEAN à Seattle dans le but de présenter en anglais une affiche sur mes travaux de recherche. En plus de l’affiche, j’ai eu la chance dans le cadre de cette même conférence de rédiger mon premier article en anglais. La participation à la conférence OCEAN a été pour moi une expérience nouvelle et un peu stressante, mais au combien enrichissante. Merci de m’avoir donné une opportunité de sortir de ma zone de confort et de me prouver à moi-même que j’étais capable de relever ce défi. Merci pour l’ensemble de votre implication et de m’avoir aidé à faire de ce projet de maîtrise une réussite ! Je voudrais aussi prendre quelques mots pour remercier les évaluateurs de ce mémoire : Monsieur Christan Larouche et Monsieur Éric Guilbert.
Lorsqu’on réalise des études graduées, il y a inévitablement des hauts et des bas. C’est pour-quoi, avoir des collègues et des amis est très important pour avoir une ambiance de travail stimulante et faire des activités pour rire, s’amuser et se détendre. Dans ce contexte, je vou-drais remercier mon ami Willian Ney Cassol pour avoir été avec moi lors de mes études. Tu as été tout d’abord mon collègue de conférence et de bureau pour au final, devenir un ami et un confident. Nous avons eu bien du plaisir en allant à plusieurs conférences : CHC-Victoria, USHydro-Biloxi, OCEAN-Seattle et la petite dernière CHC-Québec. De plus, nos pauses thé à notre local au centre de recherche ont été à l’origine de merveilleuses discussions. Obrigado meu amigo (Merci mon ami) ! Par ailleurs, j’aimerais remercier mon ami Philippe Blais, le seul de mes collègues du baccalauréat en génie géomatique assez fou pour débuter comme moi une maîtrise en sciences géomatiques. Merci d’avoir pris le temps de m’écouter chialer à
l’occasion sur ma programmation et de m’avoir aidé à garder le morale en sachant toujours voir le côté positif. Ensuite, un merci à mes collègues au centre de recherche : Pauline Per-bet, Oliver Matte, Thanh Huy Nguyen et Reza Mahmoudi pour les belles discussions sur nos projets respectifs et votre bonne humeur. Un merci également à mes partenaires de squash Frédéric Mccune et Olivier Matte, mes partenaires de deck hockey et mon équipe de volleyball FFGG.
Sans donnée, infrastructure administrative et financement, il n’aurait pas été possible de réa-liser ce projet de recherche. Je voudrais donc remercier le CIDCO (Centre Interdisciplinaire de Développement en Cartographie des Océans), le Service hydrographique du Canada (SHC) et le Groupe OCEAN pour les jeux de données bathymétriques. Merci aux personnels excep-tionnels du Département des sciences géomatiques et de la Faculté de foresterie, géographie et géomatique de l’Université Laval et du Centre de recherche en données et intelligence géospa-tiales (CRDIG) pour tout votre support administratif lors de mes études. Ensuite, merci au RéCREH (Réseau Canadien de Recherche et d’Enseignement en Hydrographie pour avoir fi-nancé la participation aux conférences hydrographiques CHC2018, USHydro2019 et CHC2020. Merci également au Fonds de Recherche du Québec en Nature et Technologie (FRQ-NET) et le Projet Hydro ASV pour la bourse tout au long de mes études.
Introduction
Mise en contexte
L’hydrographie est le domaine des sciences appliquées ayant pour mission de mesurer et com-prendre les éléments physiques des plans d’eau. De manière plus précise, la 4e conférence
hydrographique internationale extraordinaire de l’Organisation Hydrographique Internatio-nale (OHI) définit cette science comme ceci :
L’hydrographie est la branche des sciences appliquées traitant du mesurage et de la description des éléments physiques des océans, des mers, des zones côtières, des lacs et des fleuves, ainsi que de la prédiction de leur changement dans le temps, essentiellement dans l’intérêt de la sécurité de la navigation et de toutes les autres activités maritimes, incluant le développement économique, la sécurité et la défense, la recherche scientifique et la protection de l’environnement (Zafaryab et al.,2011).
Dans ce domaine, il existe différentes techniques de mesure comme la bathymétrie. Cette technique d’acquisition de données utilise un sondeur acoustique multifaisceaux ou encore un MBES (MultiBeam EchoSounder), une centrale inertielle IMU (Inertial Measurement Unit) et un récepteur GNSS (Global Navigation Satellite System). Elle permet de créer un nuage de points 3D dans un système de coordonnées global représentant le relief du fond de l’eau. Cependant, plusieurs sources d’incertitudes viennent altérer la qualité des points de sonde mesurés. C’est pourquoi, l’élaboration d’estimateurs d’erreur permettant de détecter et de quantifier certaines erreurs en bathymétrie constitue une voie de recherche présente dans la littérature (Hughes Clarke, 2003; Jørgen and Denmark, 2010; Bian et al., 2018). Parmi les erreurs prises en considération, il y a celles liées au calcul de la vitesse du son dans l’eau, à l’orientation du capteur (roulis, tangage, lacet) et au positionnement GNSS. Dans le contexte des ASV (Autonomous Surface Vehicles) (Figure 0.1) ou véhicules autonomes de surface, ces estimateurs d’erreur permettraient de rendre plus robustes les levés réalisés par ce type de véhicule, car les données acquises seraient validées en quasi-temps réel avant que le véhicule retourne à terre. Ceci permettrait d’assurer que les données respectent les spécifications demandées du levé hydrographique. Étant donné que les ASV sont de petite
taille, ils sont régulièrement utilisés dans des zones peu profondes et inaccessibles par des vedettes hydrographiques conventionnelles. Dans de tels environnements, il y a un plus grand risque d’avoir des points de sonde aberrants. Pour cette raison, les estimateurs d’erreur seraient d’autant plus bénéfiques pour ce type de véhicule. Dans un contexte de levé traditionnel avec un hydrographe à bord d’une vedette, ces estimateurs d’erreur permettraient de guider l’opérateur en lui lançant automatiquement des alertes en cas de détection de biais d’erreur bathymétriques trop grands. Le principe de mise en œuvre des estimateurs d’erreur consiste à les appliquer dans la zone de recouvrement entre au moins deux lignes de levé parallèles ou perpendiculaires et de vérifier la présence et la grandeur du biais de positionnement sur cette surface. Traditionnellement, de tels estimateurs d’erreur doivent être appliqués sur des surfaces planes (fond plat et pente constante). Pour cette raison, il faut leur fournir la position des plans significatifs (c.-à-d. des grands plans) au fond de l’eau, les paramètres de l’équation de plan ainsi que l’incertitude associée à chacun des paramètres de plan. En plus de ces informations, chacune des régions planes extraites doit être associée à une liste de points de sonde provenant d’au moins deux lignes de levé.
Dans un autre contexte applicatif, l’extraction de plans dans un nuage de points bathymé-trique peut servir à alimenter des algorithmes de calibration automatique de sondeur mul-tifaisceaux (Seube and Keyetieu, 2017). Plus particulièrement, l’objectif de ces algorithmes est de déterminer les angles de visée entre le système d’axe du multifaisceaux et celui de la centrale inertielle. Pour déterminer ces inconnues, une méthode de compensation générale est appliquée sur une surface plane en combinant dans un modèle mathématique l’équation de géoréférencement des systèmes MBES et l’équation d’un plan. Par conséquent, extraire des plans dans un nuage de points bathymétrique permet d’alimenter ces algorithmes de calibra-tion, puisque ces derniers ont besoin d’avoir la position des plans significatifs et une valeur a priori pour chaque paramètre de l’équation de plan inhérente à chacune des régions planes extraites.
Problématique
La mise en œuvre des estimateurs d’erreur et des algorithmes de calibration automatique de système MBES nécessite d’extraire au préalable des régions planes dans un nuage de points bathymétrique. L’extraction de surfaces planes dans un nuage de points est un sujet actif en recherche et apporte son lot de problèmes et de solutions. Dans cette section, les problèmes généraux liés à l’extraction de plans dans un nuage de points bathymétrique et LiDAR ainsi que les limites des solutions provenant du domaine de la cartographie sous-marine et du LiDAR aérien sont explorées.
Problèmes généraux
Données bathymétriques
La présence de bruit et de points aberrants dans un nuage de points bathymétrique rend difficile l’extraction de régions planes. Dans ce type de nuage, chaque point de sonde est le résultat d’un retour d’énergie d’une onde sonore atteignant une surface au fond de l’eau. La taille de l’empreinte de l’onde acoustique sur le sol varie en fonction de plusieurs paramètres comme la hauteur de la colonne d’eau, l’angle d’ouverture de l’antenne sonar et la fréquence de l’onde utilisée. Ce principe d’acquisition a comme conséquence de créer une incertitude dans le positionnement des points de sonde notamment en présence de certains types de topographie. Par exemple, lorsque l’acquisition des sondes se fait au dessus d’un canyon, il peut y avoir plusieurs retours issus soit du fond du canyon soit de chaque côté. Ces échos multiples sont une source de bruit et ils peuvent aussi être causés par des réflexions aller-retour sur le fond ou avec la coque du navire (Zafaryab et al., 2011). Les faux échos sont pour leur part une autre source de points aberrants. Ils sont dus à la présence de bancs de poissons, de bulles d’air et à la présence d’algues dans la colonne d’eau ce qui empêche l’onde sonore d’atteindre le fond de l’eau (Zafaryab et al.,2011). Les autres sources de points aberrants sont dues au mouvement de la plateforme. En effet, des mouvements brusques et rapides de la plateforme d’acquisition modifient son orientation et causent une déformation dans le nuage de points ce qui change l’apparence de la topographie du fond. De surcroît, une erreur de célérité de son dans l’eau peut venir courber vers le bas ou vers le haut la forme apparente du terrain dans le nuage de points bathymétrique et ceci même en présence de plans. En somme, les sources de points aberrants et de bruits sont nombreuses en bathymétrie et elles représentent un obstacle pour l’extraction de plans puisqu’elles ajoutent des points de sonde aberrants ou encore change littéralement la forme du fond de l’eau.
Nature de la scène
Dans un autre ordre d’idées, la nature de la scène associée au nuage de points bathymétrique est particulière. En effet, sur le fond marin, les plans peuvent couvrir une large portion du
territoire. De plus, il est souvent difficile d’établir précisément la limite des plans sur le fond marin. En effet, il n’y a pas toujours des arêtes remarquables et la modification de la pente est souvent graduelle. Un autre problème est que le milieu marin est bien moins cartographié que le milieu terrestre. Il est souvent difficile d’en avoir une connaissance précise, de disposer d’une référence sur la position des régions planes pouvant servir de vérité terrain. Bref, disposer de fonds de référence dans lesquels les régions planes ont été circonscrites et caractérisées reste difficile.
Critères permettant de définir une surface plane
Pour extraire des plans significatifs répondant aux deux contextes applicatifs décrits précé-demment, il faut savoir quels sont les critères permettant de définir une surface comme étant plane. Connaître la valeur de chacun des critères est un problème en-soi. Un premier problème est de savoir à partir de quelle orientation du vecteur normal, un plan est considéré comme un fond plat, une pente constante ou encore un plan à la verticale. Un deuxième problème est de connaître la taille et la forme des plans qui permettent d’extraire les plans les plus significatifs. Un troisième problème est de savoir quelle est l’échelle la plus appropriée pour extraire les surfaces planes significatives. Cette échelle d’extraction va avoir un impact sur la caractérisation des fonds, car selon le niveau de détail, certaines zones sur le fond de l’eau sont reconnues comme des plans. Toutefois, avec une analyse plus fine, la microtopographie devient apparente et les zones ne peuvent plus être considérées comme planes. Par exemple, en présence de sable, il se peut que selon une échelle, on puisse voir des rides ou encore un fond plat.
Défis liés à tous types de nuages de points
Plusieurs problèmes généraux affectent l’extraction de plans à partir d’un nuage de points qu’il soit bathymétrique ou acquis avec un LiDAR. Ces problèmes sont dus à la nature même d’un nuage de points et au contexte d’acquisition. Nurunnabi (Nurunnabi et al.,2012) discute de cette problématique pour le LiDAR. Tout d’abord, un nuage de points est une structure désorganisée où il n’y a pas d’information a priori sur la connectivité entre les points. Ceci fait en sorte que la recherche de voisinage et le déplacement dans ce type de structure est compliqué. De plus, selon les méthodes d’acquisition de données, il peut y avoir de brusques changements dans la densité de points au sein du nuage, car certaines zones deviennent in-complètes ou encore clairsemées. Ceci peut être expliqué par la présence d’obstacles arrêtant la propagation du signal, une variation de la topographie ou un mouvement de la plateforme d’acquisition générant un balayage irrégulier du sol. Ensuite, en raison du fonctionnement et des limitations des capteurs utilisés, il y a présence de points aberrants. Ces points incohérents viennent en quelque sorte contaminer le voisinage des points de bonne qualité biaisant ainsi le calcul de la normale et de la courbure locale, des descripteurs géométriques fréquemment utilisés pour caractériser le contenu du nuage de points. Un autre élément rendant l’extraction
de plans difficiles dans un nuage de points est la présence de deux types d’arêtes probléma-tiques entre des surfaces planes. Le premier type est les arêtes en saut se trouvent entre deux surfaces ayant la même normale, mais n’étant pas à la même profondeur. Ceci pose problème, car l’orientation de la normale ne permet pas de distinguer ces deux plans. Le deuxième type qui pose problème est les arêtes lisses, car elles se trouvent entre deux surfaces où le chan-gement de courbure est tellement graduelle qu’il ne crée pas une différence assez significative dans les normales pour pouvoir distinguer deux surfaces planes.
Approches d’extraction de plans dans un nuage de points bathymétrique
Géomorphons utilisés pour la cartographie sous-marine
Dans le domaine de la cartographie sous-marine, il existe une méthode dédiée à l’extraction de la morphologie des fonds marins dans laquelle les fonds plats et les pentes sont des classes mor-phologiques. Cette technique est appliquée sur le modèle numérique de terrain (MNT) généré à partir du nuage de points bathymétrique. La méthode se nomme BRESS (Bathymetry-and-Reflectivity-based-Estimator-for-Seafloor-Segmentation) (Masetti et al., 2018). Elle permet d’extraire la géomorphologie avec un algorithme de géomorphons (Jasiewicz and Stepinski,
2013) adapté pour la bathymétrie. Puis, une classification des types de sol est faite en ex-ploitant l’image d’intensité acoustique ou "backscatter". Le terme « géomorphon » désigne une micro-structure topographique. Dans le cadre du présent projet de maîtrise, la technique de Masetti et son utilisation de la technique des géomorphons élaborée par Jasiewicz ( Ja-siewicz and Stepinski, 2013) pour les formes terrestres sont particulièrement d’intérêt. La technique des géomorphons offre quelques avantages en lien avec notre projet de recherche. Tout d’abord, elle permet d’identifier dans le MNT bathymétrique les régions de type fonds plats et pentes constantes. De surcroît, étant donné que l’algorithme des géomorphons est une méthode d’analyse de type matricielle (c.-à-d. analyse sur un MNT), elle est plus rapide que les méthodes d’analyse directement sur les points. Néanmoins, bien que la classification du terrain avec la méthode des géomorphons soit très intéressante, elle ne permet pas à elle seule de répondre entièrement aux besoins du projet, car elle permet uniquement d’identifier la po-sition des plans en segmentant une région d’analyse. En effet, cette technique ne permet pas d’extraire les paramètres de l’équation de plans de chaque plan et de calculer leur incertitude en fonction de celle des points de sonde. De plus, étant donné que la segmentation de plans avec le géomorphon analyse une représentation approchée du nuage de points (c.-à-d. MNT), il est très probable qu’il y ait des erreurs de segmentation. L’utilisation seul du géomorphon ne permet donc pas de valider que les régions planes identifiées dans le nuage de points le sont réellement. Cette validation est importante pour alimenter correctement les estimateurs d’erreur ou les algorithmes de calibration. La problématique de recherche nécessite donc une solution plus complète que l’utilisation unique du géomorphon.
Quad-tree utilisé pour calibrer les systèmes d’acquisition bathymétrique
Avant de réaliser un levé avec un sondeur multifaisceaux, ce dernier doit être calibré. Une des étapes de calibration est la détermination des angles de visée ou en anglais "boresight" entre le système d’axes de la centrale inertielle (IMU) et celui du sonar. Cette calibration peut se faire de deux manières. La première est de faire un Patch Test (Gueriot et al.,2000) qui est une méthode semi-automatique pour réaliser la calibration complète d’un système d’acquisition bathymétrique. Une nouvelle technique qui permet de déterminer les angles de visée est la méthode de calibration automatique MIBAC (MultiBeam-IMU Boresight Auto-matic Calibration) (Keyetieu,2018;Seube and Keyetieu,2017). Cette méthode a aussi besoin d’extraire des plans sur le fond de l’eau ce qui est une tâche difficile sur un terrain natu-rel (Seube and Keyetieu,2017). La méthode MIBAC consiste à diviser l’espace du nuage de points bathymétrique en rectangle 2D de surfaces variables grâce à une méthode quad-tree. Un des avantages de cette technique est que la division planimétrique du nuage de points s’adapte en fonction de la densité de points. Ceci est important notamment lorsque cette densité est changeante comme cela est le cas dans un nuage de points bathymétrique. Par la suite, chaque surface du quad-tree est analysée par une méthode de moindre carré de Deming Least Square (DLS) (c.-à-d. une méthode de compensation générale adaptée à l’équation de plan) pour sélectionner les surfaces qui sont des plans. La technique du DLS est utilisée pour faire de l’ajustement de plans ou en anglais du "plane fitting" puiqu’elle est robuste au bruit et prend en compte l’incertitude totale propagée (TPU) des points de sondes. La méthode DLS est jugée meilleure que la technique de l’ACP (Analyse en Composantes Principales) (Jackson, 2003) qui ne prend pas en compte l’incertitude des points de sonde (Seube and Keyetieu,2017). Un problème avec le quad-tree est que les surfaces planes identifiées peuvent être trop petites et incohérentes avec l’échelle d’acquisition du levé. De plus, pour alimenter les estimateurs d’erreur et faire la calibration, il est préférable de détecter quelques grands plans au lieu d’avoir plusieurs petits plans pour une même superficie de zones planes. En effet, chaque nouveau plan ajoute trois inconnus supplémentaires dans la compensation ce qui rend le processus moins optimal. En outre, plus il y a de points associés à une même région plane et plus il y a de redondance, ce qui est bénéfique pour le processus de compensation.
Approches d’extraction de plans à partir d’un nuage de points LiDAR Après avoir complété une revue de littérature, il n’y a pas, à notre connaissance, d’approche visant spécifiquement l’extraction de plans à partir de nuages de points bathymétriques autre que celles présentées précédemment. Par conséquent, la revue des méthodes existantes a été orientée vers les nuages de points LiDAR acquis à partir d’une plateforme aérienne compte tenu de leur similarité avec les nuages de points bathymétriques et de la popularité des travaux dans ce domaine. En effet, il y a beaucoup d’articles sur l’extraction de toits de bâtiment à partir d’un nuage de points LiDAR (Deschaud and Goulette, 2010; Nurunnabi et al., 2012;
Hebel and Stilla,2012;Jochem et al.,2012;Vo et al.,2015;Wu et al.,2016;Gilani et al.,2017;
Zhao et al., 2018). Ces derniers montrent les différentes méthodes utilisées et les difficultés rencontrées. Il y a principalement deux familles de techniques qui sont utilisées soient les méthodes d’ajustement de modèle et les méthodes de croissance de régions.
Algorithmes d’ajustement de modèle
Une méthode fréquemment utilisée pour faire la segmentation des toits de maison ou encore de plans en LiDAR est RANSAC (RANdom SAmple Consensus). Deschaud décrit cette méthode en détail (Deschaud and Goulette,2010). Cet algorithme itératif et aléatoire tente de trouver le meilleur plan correspondant à un ensemble de points. Le principe consiste à sélectionner au hasard trois points, de créer un modèle de plan et ensuite de calculer combien de points appartiennent à ce modèle de plan avec un calcul de distance point-plan. Après un certain nombre d’itérations, le modèle de plan ayant le plus de points est conservé. On dit de cette technique qu’elle est efficace pour détecter les grands plans, mais qu’elle est lente pour détecter les petits plans dans un grand jeu de données. De plus, la vitesse de cet algorithme est de l’ordre de O(N2) c.-à-d. proportionnelle au nombre de points impliqués au carré. Un autre
problème avec RANSAC est la nécessité d’optimiser le seuil de distance point-plan permettant de décider si un point appartient à un plan ou non. De plus, cette technique a tendance à créer de faux plans. D’autres auteurs disent que RANSAC peut être optimisé en ajoutant des informations sur la normale et la connectivité spatiale entre les points (Zhao et al.,2018). Ils précisent aussi que les résultats du RANSAC dépendent beaucoup de la sélection des points qui est faite avant d’appliquer l’algorithme (Zhao et al., 2018). Par exemple, Hebel et Stila montrent dans leur méthode d’extraction de toits de maisons que RANSAC peut être utilisé pour estimer les paramètres des plans à la suite d’une segmentation par croissance de régions (Hebel and Stilla,2012).
Une autre méthode reposant sur l’ajustement de modèles est la transformée de Hough 3D. Cet algorithme est basé sur un système de votes qui permet d’associer un plan à l’espace 3D de points (Gilani et al.,2017). Cette technique est plus lente que d’autres techniques d’extraction de plans (Wu et al.,2016). La raison est qu’elle est coûteuse en temps de calcul (Gilani et al.,
2017).
En résumé, les méthodes d’ajustement de modèles ne semblent pas permettre d’obtenir une détection efficace des plans dans un nuage de points, puisqu’elles sont coûteuses en temps de calcul et elles présentent une forte sensibilité aux valeurs choisies pour leurs paramètres de configuration (ex. seuil de distance point-plan).
Algorithme de croissance de régions
La croissance de régions est une méthode très populaire pour faire la détection des plans dans un nuage de points LiDAR (Nurunnabi et al.,2012). Le principe général de la méthode
est relativement simple. À partir de l’identification, d’un point appelé amorce ou "seed" de la croissance, il est possible d’évaluer la similarité ou encore la ressemblance (selon des cri-tères prédéfinis) des points du voisinage vis-à-vis des points déjà sélectionnés dans la région (Deschaud and Goulette,2010). Souvent, le critère de ressemblance est un seuil de distance point-plan entre le plan local de la zone de croissance et les potentiels nouveaux points de cette même zone (Deschaud and Goulette,2010). Malgré sa simplicité apparente, il existe des problèmes avec cette méthode. Tout d’abord, les méthodes conventionnelles de croissance de régions ne sont pas stables à cause de la distribution complexe des points et la présence de bruit (Wu et al., 2016). Ces techniques peuvent générer facilement de mauvaises segmenta-tions de plans (Zhao et al.,2018). Par exemple, la segmentation du nuage de points LiDAR aéroportés peut aboutir à des résultats erronés lorsque les frontières des toits sont floues (Zhao et al.,2018). Un autre problème est que les résultats de la croissance de régions ont tendance à sur segmenter ou sous segmenter les régions planes (Nurunnabi et al., 2012; Wu et al.,
2016). Par ailleurs, certaines techniques de croissance de régions exploitent la normale et la courbure locale en chaque point (Jochem et al.,2012;Gilani et al.,2017). Pour calculer cette normale et cette courbure, une analyse en composantes principales (ACP) locale est réalisée dans le voisinage de chaque point. Cependant, l’ACP est très sensible au bruit et aux points aberrants ce qui affecte la qualité des vecteurs normaux (Nurunnabi et al.,2012;Wu et al.,
2016). Par exemple, ceci a comme impact que les normales proches des arêtes de toit sont incorrectes (Nurunnabi et al.,2012) (Wu et al.,2016). Donc, la présence de bruit et de points aberrants dans le nuage de point diminue la précision de la détection des contours des plans. Par la suite, les techniques de calcul de l’amorce varient entre les méthodes de croissance de régions. Des auteurs utilisent un indice de rugosité de surface (Jochem et al.,2012) tandis que d’autres utilisent la courbure calculée avec la technique de l’ACP locale (Nurunnabi et al.,
2012). Ce choix est très important, car l’algorithme de croissance de régions est sensible à l’emplacement de l’amorce (Nurunnabi et al., 2012). En fonction de ce choix, il faut aussi spécifier un seuil soit de courbure ou d’indice de rugosité pour identifier les zones d’amorce. Ensuite, la taille du voisinage pour calculer une ACP locale peut causer des problèmes, car le calcul de la normale est sensible au bruit. Un grand voisinage décrit moins précisément la géométrie, mais est plus robuste au bruit, car il y a une plus grande variété d’information. Toutefois, s’il n’y a pas assez de voisins, ceci crée de la sous et sur segmentation de plans (Nurunnabi et al., 2012). Par conséquent, il est important de choisir une taille de voisinage appropriée, car cela a un grand impact sur les normales et les courbures locales calculées. Il existe plusieurs types de voisinage et ce choix affecte le calcul des vecteurs normaux. Le premier type est les voisins à une distance fixe (FDN - Fixed Distance Neighbors) et le deuxième type est les k plus proches voisins (kNN - k Nearest Neighbors) (Nurunnabi et al.,
2012). Le voisinage kNN est meilleur, car il est mieux adapté aux nuages de points qui n’ont pas une densité de points uniforme (Nurunnabi et al.,2012;Zhao et al.,2018). D’autres auteurs
décident d’analyser le voisinage avec un troisième type de voisin soit les voxels (Deschaud and Goulette, 2010) ou encore la structure kd-tree (Nurunnabi et al.,2012). Au final, pour appliquer un algorithme de croissance de régions, il faut choisir le meilleur type de voisinage ainsi que déterminer les seuils venant avec ce choix.
Énoncé de la question de recherche
En résumé, plusieurs difficultés se présentent lorsqu’on veut extraire des plans dans un nuage de points bathymétrique. La première est que les plans sur un terrain naturel comme le fond de l’eau ne sont pas faciles à identifier puisqu’il n’y a pas toujours d’arêtes remarquables et que leur détection est dépendante de l’échelle choisie. De surcroît, la donnée bathymétrique contient beaucoup de bruit et de points aberrants rendant la détection des surfaces planes plus difficile. La raison est que la présence de ces points contamine en quelque sorte la normale et la courbure locale de chaque sonde. Ces deux caractéristiques sont très importantes pour détecter les plans. Un autre problème est qu’un nuage de points bathymétrique a une densité de points variable rendant ainsi la détection des plans plus difficile, car il manque des données à certains endroits. Il existe une approche appelée géomorphon en traitement de nuage de points bathymétrique qui permet d’extraire à partir du MNT différents types de morphologie de terrain comme les fonds plats, les pentes, les ravins, les canyons, etc. (Masetti et al.,2018). Toutefois, cette solution ne permet pas de répondre à l’ensemble des besoins des estimateurs d’erreur en matière d’information sur les fonds observés, car cette méthode fait uniquement la caractérisation du terrain au fond de l’eau. Une autre solution qui existe pour segmenter des plans dans un nuage de points bathymétrique est le quad-tree (Seube and Keyetieu,
2017). Cependant, cette technique crée des surfaces planes trop petites en fonction de l’échelle d’analyse pour alimenter efficacement les estimateurs d’erreur. Dans le domaine du LiDAR aérien, il existe plusieurs méthodes pour extraire des plans dans un nuage de points comme des toits de bâtiments. Les méthodes d’ajustement de modèle comme RANSAC et la transformée de Hough3D ne sont pas efficaces, car elles sont coûteuses en temps de calcul (Deschaud and Goulette, 2010). Une autre technique utilisée est la croissance de régions. La difficulté inhérente à son utilisation réside dans la détermination adaptée et robuste de différents seuils ou de certains modes de fonctionnement de l’algorithme. En effet, il faut choisir une technique de calcul des points d’amorce, déterminer la taille du voisinage caractéristique des points, à la fois ni trop grand ni trop petit, et choisir des critères de croissance de régions robustes au bruit (Nurunnabi et al.,2012) le tout sans rendre l’algorithme inefficace en temps de calcul.
Compte tenu des problèmes mentionnés ci-dessus, la question de recherche ciblée est la sui-vante : est-il possible de concevoir et de développer une méthode d’extraction de plans dans un nuage de points bathymétrique permettant d’alimenter des estimateurs d’erreur bathymé-trique tout en étant efficace, robuste et avec laquelle il serait possible d’estimer les paramètres des plans et leur incertitude associée ?
Hypothèse
Dans le but d’évaluer les orientations méthodologiques à privilégier afin de répondre à notre question de recherche et d’énoncer notre hypothèse de recherche, une revue de littérature a été réalisée. Celle-ci a permis de mettre en évidence qu’il existait des approches de segmentation de plans traitant le nuage de points à partir de son MNT bathymétrique comme celle des géo-morphons. D’autres approches traitent le nuage de points directement en utilisant différentes variantes de la méthode de croissance de régions. Par ailleurs, ces techniques incluent certaines caractéristiques qui permettent de rendre la croissance de régions plus robuste au bruit et aux points aberrants, plus efficace en temps de calcul et plus générique. Les prochaines sections présentent ces approches en détail, lesquelles nous amènent vers l’énoncé de l’hypothèse de recherche.
Approximation des plans à l’aide de la méthode des géomorphons
Selon ce qui a été souligné dans la problématique, la technique des géomorphons est intéres-sante pour trouver rapidement des zones planes à partir d’un MNT bathymétrique (Masetti et al., 2018;Jasiewicz and Stepinski, 2013). Cependant, elle ne répond qu’en partie au pro-blème posé. Par conséquent, c’est une méthode qui doit être envisagée en combinaison avec d’autres approches, où l’extraction de régions planes approximatives viendraient alimenter des traitements subséquents. Ceci reprend l’idée générale présentée dans (Zhao et al.,2018), où un plan précis est détecté en 3 étapes soient : la segmentation du plan initiale, la vali-dation du plan initial et son extraction précise en utilisant un algorithme de croissance de régions. Dans le cadre de ce projet, la segmentation initiale pourrait être faite avec la méthode des géomorphons pour trouver des régions planes approximatives pour ensuite appliquer une croissance de régions ciblée pour affiner le résultat.
Amélioration des normales et courbures locales
Plusieurs auteurs proposent des méthodes pour améliorer la technique de l’ACP locale dans le but d’obtenir de meilleurs vecteurs normaux et de meilleures courbures soient la robust
PCA approch dans (Nurunnabi et al., 2012) ou encore la PCA mollification dans (Gilani
et al., 2017). De son côté, Deschaud (Deschaud and Goulette, 2010) calcule les vecteurs normaux avec une méthode de type Weighted Plane Fitting (WPF) et filtre les vecteurs normaux locaux. Le principe est que pour chaque point p, on garde uniquement les points
de son voisinage pour lesquels le vecteur normal respecte un seuil d’écart angulaire avec la normale locale de p. Ensuite, on recalcule les vecteurs normaux avec l’approche WPF, mais uniquement avec les points conservés par le filtre. Cette amélioration des vecteurs normaux permet de rendre plus robuste les normales extraites notamment pour les points proches des frontières. Le tout permet d’augmenter le taux de bonnes détections des plans.
Plusieurs critères de croissance
Les algorithmes de croissance de régions utilisent différents critères de croissance. Trois d’entre eux sont particulièrement efficaces. Nurunnabi montre dans (Nurunnabi et al.,2012) l’effica-cité de chacun d’eux. Le premier critère est celui de l’écart angulaire d’inclinaison entre le vecteur normal du plan local et le vecteur normal local de chaque point candidat à la crois-sance. C’est souvent le critère de base utilisé pour faire la croissance de régions planes. Le deuxième est la distance orthogonale entre le plan local et chaque point candidat à une zone de croissance. Utiliser cette distance comme critère permet de limiter l’effet des points aber-rants. Ensuite, le troisième critère est celui de la distance euclidienne entre chaque point dans une même région. Cette distance permet de prendre en compte les problèmes des arêtes en saut. En utilisant ces critères, la méthode de Nurunnabi a permis d’éliminer l’impact de 50 % des points aberrants.
Analyse du voisinage et croissance en utilisant un octree
Lorsqu’on applique un algorithme de croissance de régions, il faut choisir quel type de voisinage analyser pour faire croître les régions. La plupart des auteurs utilisent les kNN (k Nearest Neighbors) pour les k plus proches voisins. Un avantage de ce type de voisinage est qu’il peut s’adapter à des nuages de points où la densité est variable. Une limite est la vitesse pour chercher les k voisins (Nurunnabi et al., 2012). Pour faire cette recherche du voisinage, une structure de type octree peut être utilisée. Un octree est une structure de données permettant de diviser un espace tridimensionnel en un ensemble de voxels (c.-à-d. sous-groupe de points 3D) (Samet,1988). Dans l’article de (Vo et al.,2015), on montre qu’un processus de croissance de régions basé sur un octree est plus efficace qu’un basé sur un kd-tree. En effet, le temps de calcul avec la méthode basée sur l’octree est constant même si le nombre de points augmente dans le nuage de points. Pour sa part, le temps de calcul de la méthode de croissance de régions basée sur le kd-tree augmente de manière linéaire en fonction du nombre de points. Un autre article exploite la structure de l’octree pour diriger la croissance de régions en fonction de la proximité des voxels (Deschaud and Goulette,2010). Le contenu de chaque voxels voisins de la zone de croissance est examiné pour ajouter ou non des points dans la région en croissance. De plus, les régions sont mises à jour non pas après chaque nouveau point ajouté, mais après l’analyse de tous les points d’un voxel. Le tout permet d’avoir des gains en termes de temps de calcul. Une autre approche de croissance de régions exploitant l’octree est utilisé par (Vo et al., 2015). Dans cette méthode, la croissance est faite initialement par voxel et non par
point. C’est-à-dire que les critères de croissance sont calculés pour chaque voxel et non pas pour chaque point. Par croissance de régions, des régions planes approchées sont créées à partir d’un ensemble de voxels respectant les critères de croissance. Ensuite, pour chaque région plane approchée, tous les points de ces voxels voisins sont analysés dans le but de raffiner cette région plane. En somme, l’octree permet de rendre plus efficace, en terme de temps de calcul, un algorithme de croissance de régions et permet de guider spatialement le processus de croissance.
Énoncé de l’hypothèse de recherche
Une technique de Croissance-de-Régions-Adaptée-aux-nuages-de-points-Bathymétriques (CRAB) (Nurunnabi et al.,2012;Deschaud and Goulette,2010;Zhao et al.,2018) avec une croissance ciblée sur des plans approchés obtenus à partir de la classification par géomorphons (Masetti et al.,2018;Jasiewicz and Stepinski,2013) permet d’extraire des plans d’un nuage de points bathymétrique selon une approche qui soit efficace et robuste tout en étant capable d’estimer les paramètres des plans et leurs incertitudes associées.
Objectifs
Objectif général
L’objectif général de ce projet de recherche est de concevoir et développer une méthode d’extraction de plans dans un nuage de points bathymétrique en utilisant une méthode de Croissance-de-Régions-Adaptée-aux-nuages-de-points-Bathymétriques (CRAB) selon une ap-proche qui soit efficace et robuste tout en étant capable d’estimer les paramètres des plans et leurs incertitudes associées.
Objectifs spécifiques
L’objectif principal sera considéré comme atteint si les sous-objectifs suivants le sont : 1. Concevoir et développer une méthode de segmentation de plans approchés dans un nuage
de points bathymétrique laquelle inclut une adaptation de l’algorithme des géomorphons pour les nuages de points bathymétriques.
2. Concevoir et développer une méthode d’extraction de plans selon une approche de crois-sance de régions, basée sur la connaiscrois-sance initiale de plans approchés et adaptée aux nuages de points bathymétriques (CRAB). Plus spécifiquement, cette méthode doit être efficace, robuste au bruit et aux points aberrants et permettre d’évaluer les paramètres des plans et leurs incertitudes associées.
3. Concevoir et développer une méthode de validation des performances et de l’adéquation de la méthode CRAB vis-à-vis des caractéristiques suivantes : qualité de l’extraction, efficacité et robustesse face au bruit et aux points aberrants.
Méthodologie
Démarche générale du projet de maîtrise
La Figure 0.2 fournit une vue globale de la démarche suivie lors de ce projet de maîtrise. Les flèches bleues représentent tous les processus itératifs nécessaires à la réalisation de ce projet de recherche. La première partie a consisté à identifier le projet de recherche. Elle visait essentiellement à définir à quelle problématique le projet allait tenter de répondre. À cette étape, une revue de littérature a permis d’identifier les hypothèses ou encore les solutions envisageables en ce qui concerne l’extraction des plans dans un nuage de points bathymétrique. Puis, les objectifs de recherche, la méthodologie choisie ainsi qu’un échéancier de projet ont été formulés. Tous ces éléments sont décrits dans le premier livrable du projet soit le proposé de recherche.
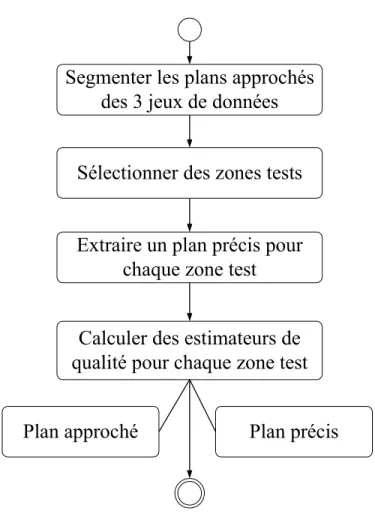
La partie conception et développement de la méthode CRAB a débuté suite à l’approbation du proposé de recherche par le comité d’évaluation. La première phase de la méthode visait à faire la segmentation des régions planes approchées en utilisant la méthode des géomorphons. La deuxième phase de la méthode visait à faire l’extraction des régions planes précises à partir des plans approchés en utilisant une méthode de croissance de régions. Plusieurs livrables ont été obtenus à la fin de cette partie. Tout d’abord, pour améliorer la qualité des vecteurs normaux locaux nécessaires à la croissance de régions, une méthode ACP robuste a été déterminée et implantée. Ensuite, plusieurs paramètres ont été stabilisés, notamment ceux intervenant dans le calcul du géomorphon. Au final, un prototype fonctionnel de l’outil CRAB a été produit. La partie analyse des résultats a permis de valider et d’analyser le produit de la méthode de d’extraction de plan CRAB. L’étape de la validation de la méthode a permis d’évaluer les résultats obtenus selon différents critères. Le premier critère de validation est la qualité de l’extraction des plans. Pour évaluer ce critère, trois indicateurs de qualité sont utilisés. Le premier indicateur est la racine carré de la moyenne quadratique de l’écart au carré (EMQ) de la distance orthogonale entre les points associés à un plan et ce même plan. Le deuxième indicateur est le EMQ de la courbure locale de chaque point associé à un plan. Plus la valeur de ces indicateurs de qualité est faible et plus le groupe de points associé à un plan par la méthode CRAB s’approche d’un vrai plan au sens mathématique du terme. Pour obtenir le troisième indicateur de qualité, un patch test avec un logiciel de traitements de données bathymétriques a été fait sur une région plane extraite avec CRAB. La différence entre les biais du patch test obtenus et les valeurs connue du patch test original représente le troisième indicateur pour évaluer la qualité des plans extraits avec CRAB. Le deuxième critère de validation est l’aspect générique de la méthode. Pour l’évaluer, l’extraction de régions planes a été appliquée sur différents jeux de données ayant des morphologies de terrains et des profondeurs différentes. Les EMQ de la distance orthogonales et de la courbure ont été utilisés pour comparer quantitativement les plans extraits entre les jeux de données. Le troisième
critère de validation est l’efficacité de la méthode. L’indicateur de qualité est le temps de calcul pour chacune des étapes de la méthode CRAB. Le quatrième critère de validation est la robustesse de la méthode. Pour évaluer ce critère, la méthode CRAB a été appliquée à la fois sur un jeu de données nettoyé et un jeu non nettoyé. Les EMQ pour évaluer la qualité des plans extraits ont été utilisés comme indicateurs de qualité pour la robustesse.
Après l’analyse des résultats, il s’en est suivi la partie de rédaction du mémoire et la prépara-tion de la présentaprépara-tion orale du projet de recherche. La démarche méthodologique de ce projet de maîtrise s’est conclue par la présentation orale devant les professeurs du Département des sciences géomatiques et le dépôt initial du mémoire.
Phase 1 : Segmentation des plans approchés avec les
géomorphons Phase 2 : Extraction des plans
précis avec croissance de régions
Valider la méthode d'extraction
Analyser les résultats
Préparer la présentation orale
Rédiger le mémoire Concevoir et développer CRAB Identifier le projet de recherche
Analyser les résultats
Problématique Contexte Hypothèses Objectifs Échéancier Méthode Rédiger Proposé de recherche Paramètres stables ACP robuste Prototype CRAB
Adéquation des plans précis et validés avec un
patch test Nuages classifiés selon différents indicateurs de
qualité
Présentation orale Mémoire Livrables
Structure du mémoire
L’introduction de ce mémoire visait à introduire le projet de recherche en présentant : la mise en contexte, la problématique, les hypothèses, les objectifs ainsi que la démarche méthodolo-gique. Le chapitre 1propose une revue de concepts sur des éléments théoriques en lien avec la méthode d’extraction de plans. Le chapitre 2est consacré à la méthode d’extraction de plans développé dans le cadre des travaux de recherche. Le chapitre 3est consacré à la présentation et à l’analyse des résultats. La conclusion fait le bilan des travaux de recherche et suggère des pistes de réflexions et des perspectives pour les futurs travaux en lien avec ce projet de recherche.
Chapitre 1
Revue des concepts
1.1
Algorithme CUBE
L’algorithme CUBE (Combined Uncertainty and Bathymetry Estimator) (Calder and Mayer,
2003) est utilisé dans les logiciels professionnels de traitement de données bathymétriques pour créer des surfaces (c.-à-d. modèle numérique de terrain). Il a pour but d’estimer la profondeur la plus probable statistiquement pour chaque cellule d’une surface ainsi que son incertitude. L’avantage principal de CUBE est que les estimations de profondeur sont statistiquement similaires à celles générées par un nettoyage manuel des points de sonde. Toutefois, la surface CUBE est créée de manière plus objective et plus rapidement qu’un nettoyage manuel. De plus, CUBE a comme valeur ajoutée de non seulement estimer la profondeur, mais il quantifie la fiabilité de chaque estimation de profondeur. De surcroît, CUBE peut générer plusieurs hypothèses de profondeur pour chaque cellule. Ceci permet d’identifier manuellement les zones ayant un niveau d’incertitude plus grand et qui nécessitent une vérification manuelle d’un hydrographe par exemple. Un autre avantage de CUBE est que cet algorithme est efficace en temps de calcul et il peut être utilisé en temps réel.
1.1.1 Méthodologie de CUBE
La première étape de la méthode CUBE consiste à créer une grille de nœuds selon une pro-jection cartographique et une résolution r. Ici, les nœuds sont les centres des cellules de la surface. La résolution définie par l’utilisateur est importante, puisqu’elle doit représenter l’in-certitude horizontale générale du levé qui est fonction des capteurs utilisés et de la profondeur moyenne.
La deuxième étape de CUBE sert à calculer la TPU (Total Propagated Uncertainty) hori-zontale et verticale de chaque point de sonde si. Le calcul de la TPU horizontale σ2hi et la TPU verticale σ2
vi se fait par une sommation des variances a priori d’un certain nombre d’er-reurs bathymétriques qu’il est possible de modéliser (Lawes, 2013; Hare et al., 2011; Hare,
1995). À noter que ces erreurs sont considérées comme étant indépendantes entre elles, car il est difficile de quantifier par un terme de covariance la dépendance entre les termes d’er-reur. Les valeurs de TPU sont en général calculées lors du traitement des données brutes par les logiciels bathymétriques comme Qimera. Ce calcul s’appuie entre autres sur l’incertitude des capteurs intervenant dans le système hydrographique (par exemple : GNSS, multifaiseau, centrale inertielle).
La troisième étape sert à sélectionner les points de sonde contribuant à chaque nœud. Chaque sonde peut contribuer à plus d’un nœud. L’ensemble des points de sonde Sj contribuant à estimer la profondeur d’un nœud (Équation 1.1) doit respecter un seuil de distance rmax(i). Ici, δij est la distance entre un point de sonde j et le nœud i. Dans l’Équation 1.2, le paramètre
σ2max correspond à l’incertitude limite du levé selon la norme S-44 de l’OHI.
Sj = {∀si ∈ S : δij < rmax(i)} (1.1)
rmax(i) = max
( r, r · α s σ2 max σvi2 −1 − sHσ 2 hi ) (1.2)
La quatrième étape consiste à créer des estimations de profondeur. En effet, chaque sonde
si apporte au nœud nj une estimation ej(si). Celle-ci comporte deux composantes soit la profondeur calculée pi de la sonde et une estimation de son incertitude globale σ2Gij (voir
Équation 1.3). ej(si) = " pi σGij2 # (1.3)
L’Équation 1.4permet de combiner la TPU horizontale σ2
hiet la TPU verticale σ2vide chaque sonde si pour obtenir une valeur d’incertitude globale σ2Gij pour cette sonde par rapport à son association à un nœud nj. Plus la sonde est éloignée du nœud (δij) et plus l’incertitude globale de cette sonde est grande par rapport à ce nœud. Le facteur sH correspond au facteur échelle de la pire incertitude horizontale possible (typiquement 1.96) et α est un paramètre exponentiel de distance défini par l’utilisateur (typiquement 2). Le tout étant fonction de l’espacement minimal entre chaque nœud, c’est-à-dire la résolution r.
σGij2 = σvi2 1 + " δij + sH · σhi2 r #α! (1.4)
La cinquième étape est la création d’hypothèse. À chaque fois qu’une sonde est associée à un nœud, une nouvelle hypothèse de profondeur est créée ou cette sonde vient contribuer
à une hypothèse existante. Les hypothèses sont créées selon le modèle Multiple Hypothesis Tracking (MHT) qui est une extension à plusieurs dimensions du modèle Bayesian Dynamic Linear Model (DLM) (Calder and Mayer,2003). CUBE considère qu’un nœud avec une seule hypothèse est une estimation plus fiable qu’un nœud avec plusieurs hypothèses. Les détails sur ces modèles statistiques et comment ils sont utilisés dans CUBE se retrouvent dans l’article de Calder (Calder and Mayer,2003). Pour déterminer la meilleure hypothèse pour l’estimation de profondeur, trois options sont possibles. La première option considère que la meilleure hypothèse est celle associée au plus grand nombre de sondes. La deuxième option détermine la meilleure hypothèse en analysant la moyenne des hypothèses les plus probables des nœuds voisins. La troisième option combine à la fois le nombre de sondes et la moyenne des hypothèses les plus probables du voisinage au nœud.
1.1.2 Choix de la résolution d’une surface CUBE
Lorsqu’on utilise CUBE, l’utilisateur doit définir une résolution pour la surface. Celle-ci doit être représentative de l’incertitude du levé bathymétrique. Pour ce faire, le Service Hydrogra-phique du Canada (SHC) recommande des résolutions de grilles CUBE selon la profondeur moyenne du levé et de l’incertitude des sondes (Position Accuracy (POSACC) et Sounding Accuracy (SOUACC) )(voir Tableau 1.1).
Profondeur jusqu’à Résolution de la surface CUBE POSACC SOUACC Exigence liée au système de positionnement Ordre du SHC 15 m 0.25 m 0.125 m < 0.19 m RTK, PPK Spécial exclusif 25 m 0.50 m 0.25 m < 0.31 m RTK, PPK Spécial 50 m 1.00 m 0.50 m < 0.45 m PPP, DGPS, WAAS, C-Nav, Starfix Spécial 100 m 2.00 m 1.00 m < 1.39 m Post-traitement autonome 1 100 m + 5.00 m + 2.50 m + < 2.51 m + GPS autonome 2
1.2
Géomorphons et classification de la topographie
L’algorithme des géomorphons permet d’identifier à partir d’un modèle numérique de terrain (MNT) les 10 formes morphologiques les plus fréquentes (voirFigure 1.3). Cette technique est expliquée en détail dans (Jasiewicz and Stepinski,2013). Cette méthode de classification peut être appliquée sur des MNT créés à partir de données LiDAR et sur des MNT bathymétriques (Masetti et al.,2018). Le principe de cette méthode est de simuler une interprétation humaine de la topographie. Pour ce faire, les géomorphons exploitent des outils d’analyse de texture issus du domaine de la vision par ordinateur adaptés aux formes topographiques plutôt que des outils de géométrie différentielle. Le terme « géomorphon » désigne une micro-structure topographique. Pour les identifier, au lieu d’utiliser une taille de voisinage fixe, l’algorithme regarde le voisinage le plus adapté à la topographie locale. Lors de son exécution, l’algorithme des géomorphons analyse chaque cellule du MNT. Pour chacune d’elles, il regarde dans la direction de ses 8 voisins et il évalue si la surface monte, descend ou encore reste à la même hauteur. Pour ce faire, il ne calcule pas un écart d’élévation, mais il utilise le principe de la ligne de visée ou en anglais "line of sight". À partir d’une distance de recherche maximale "search radius" (S), il regarde dans la direction des 8 voisins et il calcule l’angle au zénith φ et au nadir ψ entre la cellule analysée et la surface interceptée à une distance S. La Figure 1.2
adaptée de (Jasiewicz and Stepinski, 2013) montre ces éléments pour les directions nord et sud. Le seuil d’horizontalité ou "flatness threshold" F (typiquement 1°) permet de connaître si la direction voisine descend (-1) monte (+1) ou si elle est au même niveau (0) par rapport à la cellule analysée (voirFigure 1.1).
Figure 1.1 – Analyse du voisinage en regardant dans la direction des 8 voisins selon une distance de recherche S. Figure extraite de la documentation officielle de GRASS GIS
ϕ
1ψ
1ϕ
2ψ
2Δ
N= ψ
1- ϕ
1< F
Δ
S= ψ
2- ϕ
2< F
SFigure 1.2 – Concept de l’angle au zénith (φ), au nadir (ψ) et un exemple pour les directions nord ∆N et sud ∆S (Figure adaptée de Jasiewicz and Stepinski(2013))
Pour chacune des 8 directions voisines, une valeur de l’ensemble (-1,0,1) est attribuée à la cellule analysée. Selon le nombre de +1 et -1 dans le groupe de 8 valeurs associées à chaque cellule, un des 10 géomorphons de la Figure 1.3est attribué à la cellule.
Figure 1.3 – Les 10 types de géomorphons et la table d’identification de formes selon le nombre de +1 (colonne) et de -1 (ligne). Figure extraite de la documentation officielle de
GRASS GIS (GRASS Development Team,2018)
La fonction de classification de la topographie avec l’algorithme de géomorphon est disponible dans le logiciel GRASS GIS sous le nom r.geomorphon. Pour utiliser le géomorphon, il faut spécifier différents paramètres. Ces derniers sont décrits dans la documentation de GRASS 7.4 (Jasiewicz and Stepinski, 2018). Les deux principaux paramètres sont "search radius"
S et "flatness threshold" F . Le paramètre S représente jusqu’à quelle distance maximale le
voisinage d’une cellule est évalué. Plus S est grand et plus l’extraction de la morphologie du terrain par l’algorithme est faite selon une petite échelle ce qui permet de voir la topographie générale. À l’inverse, plus S est petit et plus l’extraction de la morphologie est faite selon une grande échelle ce qui permet de voir les plus petits détails. Toutefois, il n’y a pas de garantie sur l’échelle d’analyse, car même si S est grand, il se peut que la surface interceptée soit très proche de la cellule analysée. Pour sa part, le paramètre "flatness threshold" F permet de
définir le seuil d’aplatissement en degrés décimaux qui détermine si une direction voisine à une cellule a une direction topographique ascendante, descendante ou la même que la cellule analysée. Pour ce qui des deux autres paramètres, le paramètre "skip radius" SK permet de définir une distance d’atténuation permettant de réduire l’impact des petites aspérités présentes dans le MNT. Il agit en quelque sorte comme un filtre passe-bas si on prend une terminologie du domaine du traitement d’images. De son côté, le paramètre "flatness distance"
Dpermet d’éliminer l’impact des distances éloignées où la détection de la différence d’élévation
est moins bonne. Ce paramètre est important si la résolution du MNT analysé est basse. Bref, la méthode des géomorphons permet de classifier un MNT avec les 10 formes morphologiques les plus communes.
1.3
Extraction des normales et courbures locales avec une
ACP
1.3.1 Principe théorique de l’ACP
L’analyse en composantes principales (ACP) ou en anglais "principal component analysis" (PCA) est une technique de traitement de données très utilisée en sciences. Son but est de dé-terminer les composantes principales permettant d’expliquer la variabilité d’un signal. Posons une matrice Xm,ncontenant une série de n observations décrites par m variables. Pour trouver les composantes principales de ce signal (c.-à-d. un ensemble de m variables indépendantes), il faut appliquer une transformation linéaire et orthogonale C sur les observations X pour obtenir leur valeur dans le système des composantes principales Y .
Ym,n = Cm,mXm,n (1.5)
Pour avoir des composantes principales indépendantes, il faut que la transformation C rende la matrice de variance-covariance Σyy diagonale.
Σyy = σ1,12 0 · · · 0 0 σ22,2 · · · 0 ... ... ... ... 0 0 · · · σ2 m,m (1.6)
Il est possible d’exprimer Σyy en fonction de Σxx. Pour ce faire, on applique le changement de variable Y = CX, ou la loi de propagation de variance-covariance (Équation 1.9). Dans le but de simplifier le développement mathématique, les moyennes des coordonnées x et y sont supposées nulles. Σxx = 1 n −1XX T (1.7) Σyy = 1 n −1Y Y T (1.8) Σyy = CΣxxCT (1.9)
Étant donné que Σxxest une matrice symétrique et carrée, elle est décomposable en un produit d’une matrice orthogonale E contenant ses vecteurs propres et une matrice diagonale de ses valeurs propres D.
Σxx = EDET (1.10)
L’astuce ici est de poser que C = ET. Cette égalité permet d’obtenir une matrice Σ yy dia-gonale. Rappelons que la matrice C est orthogonale et que l’une de ses propriétés est que
CT = C−1. Σyy = C(EDET)CT (1.11) Σyy = C(CTDC)CT (1.12) Σyy = (CCT)D(CCT) (1.13) Σyy = (CC−1)D(CC−1) (1.14) Σyy = D (1.15)
On conclut que si la matrice de transformation C = ET, la matrice Σ
yy est diagonale et que les composantes principales sont indépendantes. Autrement dit, pour exprimer un système