Smooth motion planning for car-like vehicles
6
0
0
Texte intégral
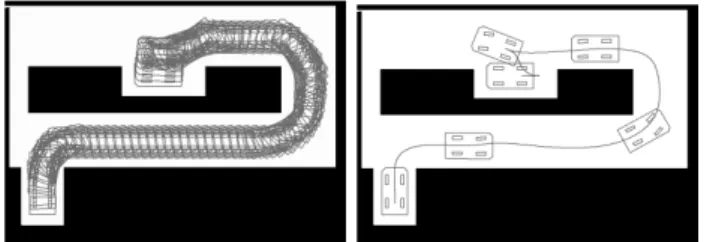
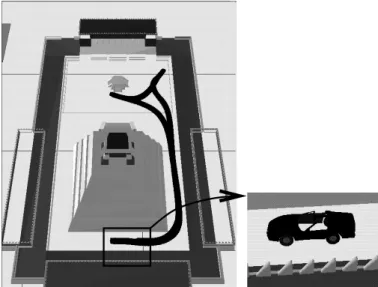
Figure

Documents relatifs
