République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieure et de la Recherche Scientifique Université Ahmed Draia - Adrar
Faculté des Sciences et de la Technologie Département des Mathématiques et Informatique
Mémoire de fin d’étude, en vue de l’obtention du diplôme de
master en informatique
Option :Systèmes d’Information et Technologie Web -
Systèmes Intelligents
Thème
Utilisation de l’interaction entre couches pour
prolonger la durée de vie des réseaux de capteurs sans
fil
Préparé par
Karima OULED JAAFRI et Youcef AICHAOUI
Encadré par
Mr. Mohammed KADDI
Remerciement
Tout d’abord, nous remercions le bon
DIEU, notre créateur de nous avoir donné
la force, la volonté et le courage afin
d’accomplir ce travail modeste. nous
adressons le grand remerciement à notre
encadreurMr: KADDI Mohammedqui a
proposé le thème de ce mémoire, pour ses
conseils et ses dirigés du début à la fin de
ce travail.
nous voudrais également remercier les membres
de jurys pour avoir accepté d’évaluer ce travail et
pour toutes leurs remarques et critiques, ainsi
et sans oublier Mr.BELAOURA Abdelwahabpour
ces conseils, son aide et son encouragement. Tout
le personnel et les enseignants du notre
département pour leur soutien inestimable. A tous
mon enseignants pour leur conseils.
Sans oublier bien sûr de remercier profondément
tous ceux qui ont contribué de près ou de loin à la
réalisation de ce travail.
Dédicace
Je dédie ce modeste travail :
A ma mère, à mon père
À mes proches frères et ma sœur, chacun par
son nom.
À toute ma famille.
À tous mes amis.
À tous mes chers enseignants.
À mon futur mari Abdelmadjid.
À mon binôme Youcef.
A tous les étudiants de la promotion 2017/2018
Option : SI &SITW
Dédicace
A MA TRÈS CHÈRE MÈREAutant de phrases aussi expressives soient-elles ne sauraient montrer le degré d’amour et d’affection que j’éprouve pour toi.
Tu m’as comblé avec ta tendresse et affection tout au long de mon parcours.
Tu n’as cessé de me soutenir et de m’encourager durant toutes les années de mes études, tu as toujours été présente à mes cotés pour me consoler quand il fallait.
En ce jour mémorable, pour moi ainsi que pour toi, reçoit ce travail en signe de ma vive reconnaissance et ma profonde estime.
Puisse le tout puissant te donner santé, bonheur et longue vie afin que je puisse te combler à mon tour.
A MON TRÈS CHER PÈRE
Autant de phrases et d’expressions aussi éloquentes soit-elles ne sauraient exprimer ma gratitude et ma reconnaissance. Tu as su m’inculquer le sens de
la responsabilité, de l’optimisme et de la confiance en soi face aux difficultés de la vie. Tes conseils ont toujours guidé mes pas vers la réussite. Ta patience
sans fin, ta compréhension et ton encouragement sont pour moi le soutien indispensable que tu as toujours su m’apporter. Je te dois ce que je suis aujourd’hui et ce que je serai demain et je ferai toujours de mon mieux pour rester ta fierté et ne jamais te décevoir. Que Dieu le tout puissant te préserve,
t’accorde santé, bonheur, quiétude de l’esprit et te protège de tout mal. A MA TRÈS CHÈRE EPOUSE
Ton encouragement et ton soutien étaient la bouffée d’oxygène qui me ressourçait dans les moments pénibles, de solitude et de souffrance.
À mes proches frères et ma sœur, chacun par son nom.
À toute ma famille.
À tous mes amis.
À tous mes chers enseignants.
À mon binôme Karima. A tous les
étudiants de la promotion 2017/2018
Option : SI &SITW
Résumé i
Remerciements iii
Dédicace iv
Table des matières v
Table des figures vi
Liste des tableaux viii
Liste des Acronymes xii
Introduction générale xiv
Chapitre 1 : Généralité sur réseaux de capteur sans fil
1.1 Introduction ... 1
1.2 Capteur ... 1
1.3 Architecteur d’un capteur . ... 1
1.3.1 Sonde ou unité de détection ... 2
1.3.2 Unité de traitement ... 2
1.3.3 Unité de transmission ... 2
1.3.4 Unité de contrôle d’énergie ... 2
1.4 Réseaux de capteurs sans fil ... 3
1.5 Architecture de communication d'un RCSF ... 3
1.6 Caractéristiques de RCSF ... 3
1.7 Contraintes de RCSF ... 4
1.8 Pile protocolaire dans un RCSF ... 5
1.9 Type des réseaux de capteurs sans fil ... 7
1.9.1 Les réseaux de capteurs terrestres ... 7
1.9.2 Les réseaux de capteurs souterrains ... 7
1.9.3 Les réseaux de capteurs sous-marins ... 8
1.9.4 Les réseaux de capteurs multimédias ... 9
1.9.5 Les réseaux de capteurs mobiles ... 9
1.10 Applications des RCSFs ... 10
Chapitre 2 : Protocoles de couche réseaux
2.1 Introduction ... 13
2.2 Classification des protocoles de routage pour les RCSF ... 14
2.2.1 Selon la topologie (structure) du réseau ... 15
2.2.2 Selon les paradigmes de communication... 16
2.2.3 Selon le mode de fonctionnement du protocole ... 17
2.2.4 Selon le mode l'établissement des chemins ... 18
2.3 Les protocoles de routage dans les RCSF ... 19
2.3.1Le protocol LEACH (Low Energy Adaptive Clustering Hierarchy) ... 19
2.3.2.Le protocol PEGASIS (Power-Efficient Gathering in Sensor Information Systems) ... …… 23
2.3.3.HEED (Hybrid, Energy-Efficient, Distributed approach) ... 25
2.3.4.Directed Diffusion (DD) ... 26
2.3.5 Geographic and Energy Aware Routing(GEAR) ... 26
2.3.6 Minimum Energy Communication Network(MECN) ... 27
2.3.7 Threshold sensitive Energy Efficient sensor Network protocol(TEEN et APTEEN) ... 27
2.3.8 Geographic Adaptive Fidelity (GAF) ... 28
2.3.9 Constrained Anisotropic Diffusion Routing (CADR) ... 29
2.3.10 COUGAR ... 30
2.4Comparaison des protocoles de routage ... 32
2.5Avantage et inconvénients des protocoles de routage ... 33
2.6 Conclusion ... 34
Chapitre 3 : Couche liaison de donnée 3.1 Introduction ... 1
3.2 Les techniques d’accès utilisées dans les réseaux sans fil ... 1
3.2.1 Accès multiple par répartition temporelle (TDMA :Time division multiple access) ... 1
3.2.2 Accès multiple par répartition fréquentielle (FDMA : Frequency division multiple ... 2
access) : (système à bande étroite) ... 2
3.2.3 Accès multiple par répartition de codes (CDMA : Code division multiple access) : (système à large bande) ... 2
3.2.4 L’accès multiple avec écoute de la porteuse/Evitement de collision (CSMA/CA) ... 3
3.3 Comparaison entre les techniques d’accès au médium dans les RCSFs ... 3
3.4 Classification des protocoles MAC ... 4
3.5 Protocoles MAC ... 5
3.6 Comparaison entre les protocoles MAC ... 12
3.7 Avantages et inconvénients des protocoles MAC ... 13
3.8 Conclusion ... 14
Chapitre 4 : Travaux liées 4.1 Introduction ... 50
4.2 Travaux liées ... 50
4.3 Comparaison entre ces travaux ... 59
4.4 Conclusion ... 60
Chapitre 5 : Implémentation du protocole PEGASIS-SMAC 5.1. Introduction ... 61
5.2. Langage utilisé ... 61
5.3. Le modèle du système ... 61
5.3.1.Le modèle de réseau ... 61
5.3.2 Le modèle de dissipation de l’énergie ... 62
5.4 Description de notre approche de routage dans les réseaux de capteurs sans fil ... 63
5.4.1 Déroulement de l’algorithme ... 64
5.5 Algorithme proposé PEGASIS-SMAC ... 64
5.6 Organigramme proposé PEGASIS-SMAC ... 66
5.7 Implémentation de protocole PEGASIS-SMAC ... 67
5.7.1 Interface du simulateur ... 67
5.7.2 Résultats de simulation ... 71
5.8 Conclusion ... 75
Conclusion générale ... 76
Table des figures
1 Figure 1.1 Echantillon de capteurs existants
Figure 1.2 Structure d’un nœud de capteur 1
Figure 1.3 Architecture d'un réseau de capteurs sans fil 3
Figure 1.4 Pile protocolaire des réseaux de capteurs sans fil 6
Figure 1.5 Applications des RCSFs 11
Figure 2.1 Classification des protocoles des routages pour RCSFs 14
Figure 2.2 Topologieplate 15
Figure 2.3 Routage hiérarchique 16
Figure 2.4 Algorithme de routage LEACH 20
Figure 2.5 Construction de la chaîne de transmission 24
Figure 2.6 Clustering hiérarchique dans TEEN et APTEEN 27
Figure 2.7 Transitions des états dans GAF 29
Figure 2.8 Plan de requête au nœud leader 30
Figure 3.1 Classification des protocoles MAC 39
Figure 3.2 Autre Classification des protocoles MAC 39
Figure 3.3 Protocole SMAC 41
Figure 3.4 Protocole SCP-MAC 42
Figure 3.5 Mécanisme de FRTS 42
Figure 3.6 BMAC: les nœuds se réveillent à intervalles réguliers. 43
Figure 3.7 Problème de l’endormissement précoce. 45
Figure 3.8 Protocole WiseMAC. 46
Figure 4.1 Un inconvénient du S-MAC adaptatif (en termes d'efficacité énergétique). 53
Figure 4.4Structure des messages RTSet CTS(champs ajoutés). 55
Figure 5.1 Modèle de dissipation d'énergie radio proposé. 62
Figure 5.2 Architecture de protocole proposé. 63
Figure 5.3 Organigramme de phase d’élection des cluster-heads 66 Figure 5.4 Organigramme de phase de formation des clusters. 66 Figure 5.5 Organigramme de phase de transmission des données. 67
Figure 5.6 L’interface "Simulateur RCSF". 68
Figure 5.7 Paramètres de simulation. 69
Figure 5.8 Zone de simulation. 70
Figure 5.9 Légende. 70
Figure 5.10 Résultats de simulation. 71
Figure 5.11 Nombre de données transmises à la BSVs nombre de rounds.
72
Figure 5.12 Energie résiduelle Vs nombre de rounds. 73
Liste des tableaux
Tableau 2.1 Comparaison des protocoles de routage hiérarchique Tableau 2.2 Avantage et inconvénients des protocoles de routage
Tableau 3.1 Comparaison entre les techniques d’accès au médium dans les RCSFs Tableau 3.2 Comparaison entre les protocoles MAC
Tableau 3.3 Avantages et inconvénients des Protocoles MAC Tableau 4.1 Comparaison entre les travaux liées.
Tableau 5.1 Caractéristiques matérielles. Tableau 5.2 Paramètres de simulation.
32 33 38 47 48 59 61 71
– RCSF : Réseau de capteurs sans fil – WSN: Wireless sensors networks
– LEACH: Low Energy Adaptive Clustering Hierarchy – LEACH-C: LEACH-Centralisé
– LEACH-F: LEACH avec grappes fixes
– SPIN : Protocoles de capteurs pour l’information par négociation – GPS : système de positionnement global
– TCP : Transmission Control Protocol
– SMACS:Self-organizing Medium Access Control for Sensor networks – EAR:Eavesdrop And Register
– CH: Cluster Head – BS: Base station
– TDMA: Time division multiplexed access – CDMA : Code division multiple access – DD : Directed Diffusion
– HEED: Hybrid, Eenergy Efficient, Distributed approach – SAR: Sequential Assignment Routing
– SMP:Sensor Management Protocol
– TADAP:Task Assignement and Data Advertisement Protocol) – GPS: Global Positioning System
– OSI:Open Systems Interconnect
– UDP-Like:User Datagram Protocol Like – QdS: Qualité de Service
– QoS:Quality of Service
– SPIN: Sensor Protocols for Information via Negotiation
– SMAC:Sensor MAC
Les avancées technologiques réalisées dans les domaines de la microélectronique et de la communication sans fil ont permis de concevoir et de fabriquer des composants miniaturisés, autonomes et fiable tels que lescapteurs. En effet, déployés sur une surface géographique importante formant un réseau de nœuds capteurs afin de collecter des informations sur des événements bien définis, et de les acheminer vers un nœud particulier de traitement, appelé puits (Sink) ou bien station de base (BS). Les informations collectées servent à construire une vision globale de la zone couverte pour prendre des décisions.
Les réseaux de capteurs sans fil (RCSF) sont généralement composés d’un grand nombre denœuds capteurs qui sont déployés aléatoirement dans une zone intérêt pour surveiller un telphénomène.
Ces capteurs collaborent entre eux et remontent l’information de nœud en nœud selon le modemulti-sauts et via une connexion sans fil jusqu’à l’aboutissement à la station de base. Or, ce schéma de communication est coûteux en termes d’énergie puisque tout nœud joue lerôle d’un nœud relai puisqu’il renvoie l’information reçue pour la première à ses voisins.
Ceprocessus de communication se répète jusqu’à l’arrivée de l’information à la station de base.
De ce fait, pour se remédier à cet inconvénient, plusieurs protocoles de routage ont été proposésdans la littérature d’une part pour communiquer l’information rapidement à la station de base etd’autre part pour communiquer l’information à la station de base à un moindre coût.
Cependant, la maîtrise de la consommation d’énergie par les réseaux capteurs et la maximisation de leur durée de vie restent les problématiques les plus fondamentales car les capteurs sont de petits composants avec une faible capacité de stockage, de calcul et sont alimentés par des batteries dont la capacité est très limitée et qui sont généralement non rechargeables. Par exemple, dans certaines applications où les capteurs sont déployés dans des zones hostiles, il est difficile voire impossible de changer les batteries. C’est le cas pour les applications conçues pour le réchauffement climatique et la surveillance de la variation de la température au pôle nord où il n’est pas pratique de mettre en place une équipe ou de l’envoyer chaque fois pour changer lesbatteries des capteurs. Donc, pour qu’un réseau de capteurs reste autonome pendant une longue durée (quelques mois ou quelques années) et ait par la suite une longévité maximale, il faut que la
consommation d’énergie soit prise en compte à tous les niveaux de l’architecture réseaux (de la couche physique à la couche application).
Les progrès récents dans les réseaux de capteurs sans fil ont conduit au développement de nombreux protocoles spécifiquement conçus pour les réseaux de capteurs où la présentation de l'énergie est un facteur essentiel.
Dans cette optique, nous proposonsun nouveau protocole est PEGASIS-SMAC qui fait l’hybridation entre deux protocoles, le premier est PEGASIS qu’il est l’un des protocoles de la couche réseaux et le deuxième est Sensor-MAC qu’il fait partie de la couche MAC. Dans ce nouveau protocole PEGASIS-SMAC , la transmission se fait par plusieurs sauts pour atteindrele cluster-head dans chaque cluster ,dont chaque cluster sous formed’une chaine reliant tous les nœuds de même cluster.
Ce mémoire s’articule autour de cinq chapitres. Dans le premier chapitre,nous présentonsun Aperçu général sur les réseaux de capteurs sans fil. Le deuxième chapitre est une présentation de couche réseaux et les protocoles de routage pour les RCSFs.le troisième chapitreest une présentation de la couche liaison de données et les protocoles liées à cette couche. Dans le quatrième chapitre, nous avons présenté les travaux liées aux réseaux de capteur sans fil .Le cinquième chapitre décrit notre méthode PEGASIS-SMAC. Enfin, nous concluons notre mémoire avecune conclusion générale et perspective.
Généralité sur réseaux de capteur sans fil
Sommaire
1.1 Introduction ... 1
1.2 Capteur ... 1
1.3 Architecteur d’un capteur . ... 1
1.3.1 Sonde ou unité de détection ... 2
1.3.2 Unité de traitement ... 2
1.3.3 Unité de transmission ... 2
1.3.4 Unité de contrôle d’énergie ... 2
1.4 Réseaux de capteurs sans fil ... 3
1.5 Architecture de communication d'un RCSF ... 3
1.6 Caractéristiques de RCSF ... 3
1.7 Contraintes de RCSF ... 4
1.8 Pile protocolaire dans un RCSF ... 5
1.9 Type des réseaux de capteurs sans fil ... 7
1.9.1 Les réseaux de capteurs terrestres ... 7
1.9.2 Les réseaux de capteurs souterrains ... 7
1.9.3 Les réseaux de capteurs sous-marins ... 8
1.9.4 Les réseaux de capteurs multimédias ... 9
1.9.5 Les réseaux de capteurs mobiles ... 9
1.10 Applications des RCSFs ... 10
C
hapitre 1 Généralité sur réseaux de capteur sans fil1
1.1 Introduction
Les réseaux de capteurs sans fil (RCSFs) sont constitués d’un grand nombre de nœuds de capteurs qui sont généralement alimentés par batterie et conçu pour fonctionner pendant une grande période.Un capteur est un petit dispositif électronique équipé d'une source d'énergie limitée.
Ce chapitre décrit quelques généralités sur les capteurs et les réseaux de capteurs sans fil en particulier.
1.2 Capteur
Les capteurs sont des objets de taille réduite avec des ressources très limitées, qui sont autonomes et sont capables de traiter les informations de l’environnement qui les entoure et de les transmettre à d’autres dispositifs grâce aux ondes radios sur une distance limitée [1].
Figure1.1:Echantillon de capteurs existants[2]
1.3 Architecteur d’un capteur :
Un nœud capteur est principalement composé de quatre unités de base : la sondeou l’unité de détection, l’unité de traitement, l’unité de transmission et l’unité de contrôle d’´énergie[3].2
1.3.1 Sonde ou unité de détection
La sonde, c’est-à-dire le capteur proprement dit, est un dispositif transformant l’état d’une grandeur physique observée en une grandeur utilisable par exemple, une tension électrique, une intensité lumineuse ou encore une température. L’unité de détection est généralement composée de deux sous-unités : le récepteur (reconnaissant l’analyste) et le transducteur (convertissant le signal du récepteur en signal électrique).
La sonde est caractérisée par plusieurs critères dont les plus courants sont la grandeur physique observée (lumière, température, bruit, humidité, etc...), son étendue de mesure ou rayon de détection, sa sensibilité, sa gamme de températured’utilisation.
1.3.2 Unité de traitement
Elle comprend un processeur généralement associe à une petite unité de stockage.
Elle fonctionneà l’aide d’un système d’exploitation spécialement conçu pour les micro-capteurs (TinyOS [59], par exemple). Elle exécute les protocoles de communications qui permettent de faire ”collaborer” un nœud avec les autres nœuds du réseau. Elle peut aussi analyser les données captées pour alléger la tâche du nœud puits (station de base).
1.3.3 Unité de transmission
Elle effectue toutes les émissions et réceptions des données sur un medium sans-fil. Elle peut être de type optique (comme dans les nœuds Smart Dust), ou de typeradio-fréquence (MICA2 , par exemple).
– Les communications de type optique sont robustes vis-à-vis des interférencesélectriques. Néanmoins, ne pouvant pas établir de liaisons `a travers des obstacles, elles présentent l’inconvénient d’exiger une ligne de vue permanente entre les entités communicantes.
– Les unités de transmission de type radio-fréquence comprennent des circuits de modulation, démodulation, filtrage et multiplexage ; ceci implique une augmentation de la complexité.
1.3.4 Unité de contrôle d’énergie
L’unité de contrôle d’énergie constitue donc un système essentiel. Elle doit repartir l’énergie disponible aux autres modules, de manière optimale (par exemple en réduisant les dépenses inutiles et en mettant en veille les composants inactifs). Cette unité peut aussi gérer des systèmes de rechargement d’énergie à partir de l’environnement via des cellules photovoltaïquespar exemple.
C
hapitre 1 Généralité sur réseaux de capteur sans fil3
1.4 Réseaux de capteurs sans fil
Un Réseau de Capteurs Sans Fil (RCSF) ou Wireless Sensor Network (WSN) est un réseau informatique composé de petits dispositifs autonomes, fixés ou dispersés aléatoirement dans une zone d'intérêt , utilisant des capteurs coopérant pour surveiller des conditions environnementales ou physiques, comme la température, le son, les vibrations, la pression, le mouvement, etc[4].
1.5 Architecture de communication d'un RCSF
Un réseau de capteurs est généralement constitué de nombreux nœuds répartis dans une zone géographique (appelée zone de couverture). Chacun de ces nœuds a la possibilité de collecter les données et de les router vers une ou plusieurs stations de base appelées puits (ou sink en anglais). Le sink collecte les données recensées par les nœuds capteurs dispersés dans la zone de couverture, et les communique vers le nœud gestionnaire de tâches via d'autres réseaux (Internet ou satellite). L'utilisateur peut alors accéder à distance à ce nœud gestionnaire de tâches pour récupérer les données recensées. Cette architecture est illustrée dans la figure 1.2[4].
Figure1.3 : Architecture d'un réseaux de capteurs sans fil[4].
1.6 Caractéristiques de RCSF
Lesréseaux de capteurs sans fil sont caractérisées par - Les nœuds capteurs sont des dispositifs de petite taille.
- Les capteurs sont limités en termes de quantité d'énergie stockée et/ou récoltéeà partir de l'environnement. Ceci fait souvent de l'énergie la ressource la plusprécieuse dans un réseau de capteurs.
4
- Les capteurs sont susceptibles de tomber en panne, suite à l'épuisement de leursbatteries ou à des influences environnementales. Ainsi, l'auto-configuration desnœuds capteurs et le développement des protocoles de détection et de remplacement des nœuds défaillants aident à prolonger la durée de vie du réseau.
- Les capteurs ont des ressources limitées : la performance du processeur, la capacité mémoire, la largeur de bande et la portée de la communication sans fil[4] .
1.7 Contraintesde RCSF
La conception et la réalisation des réseaux de capteurs sans fil sont influencées par plusieurs paramètres[5].
a) Durée de vie du réseau
C’est l’intervalle de temps qui sépare l’instant dedéploiement du réseau de l’instant où l'énergie du premier nœud s'épuise. Selon l’application, la durée de vie exigée pour unréseau peut varier entre quelques heures et plusieurs années.
b) Ressources limitées
En plus de l’énergie, les nœuds capteurs ont aussi une capacité de traitement et de mémoire limitée. En effet, les industriels veulent mettre en œuvre des capteurs simples, petits et peu coûteux qui peuvent être achetés en masse.
c) Bande passante limitée
Afin de minimiser l’énergie consommée lors de transfert de données entre les nœuds, les capteurs opèrent à bas débit. Typiquement, le débit utilisé est de quelques dizaines de Kb/s. Un débit de transmission réduit n’est pas handicapant pour un réseau de capteurs où les fréquences de transmission ne sont pas importantes.
d) Facteur d’échelle
Le nombre de nœuds déployés pour une application peut atteindre des milliers. Dans ce cas, le réseau doit fonctionner avec des densités de capteurs très grandes. Un nombre aussi important de nœuds engendre beaucoup de transmissions inter nodales et nécessite que la station de base soit équipée de mémoire suffisante pour stocker les informations reçues .
e) Topologie dynamique
La topologie des réseaux de capteurs peut changer au cours du temps pour les raisons suivantes :
- Les nœuds capteurs peuvent être déployés dans des environnements hostiles (champ debatail par exemple), la défaillance d’un nœud capteur est, donc très probable.
C
hapitre 1 Généralité sur réseaux de capteur sans fil5
- Un nœud capteur peut devenir non opérationnel à cause de l’expiration de son énergie. - Dans certaines applications, les nœuds capteurs et les stations de base sont mobiles.
f) Agrégation de donnée
Dans les réseaux de capteurs, les données produitespar les nœuds capteurs voisins sont très corrélées spatialement et temporellement. Cecipeut engendrer la réception par la station de base d’informations redondantes. Réduire la quantité d’informations redondantes transmises par les capteurs permet de réduire la consommation d’énergie dans le réseau et ainsi d’améliorer sa durée de vie. L’une des techniques utilisée pour réduire la transmission d’informations redondantes est l’agrégation des données. Avec cette technique, les nœuds intermédiaires agrègent l’information reçue de plusieurs sources. Cette technique est connue aussi sous le nom de fusion de données.
1.8 Pile protocolaire dans un RCSF
Un RCSF est une série de connexions entre les capteurs leur permettant de communiquer.Le contenu, la portée, la taille, la vitesse et la fiabilité du réseau dépend d'un ensemble de protocoles et de leur implémentation. Les protocoles sont un moyen de communication prédéterminé. Conceptuellement, il est utile de représenter l'ensemble de ces protocoles sous forme d'une pile, c'est ce qu'on appelle la pile protocolaire. La pile protocolaire utilisée par la station de base, ainsi que tous les autres capteurs du réseau, est illustrée dans la figure 1.3. Elle comprend la couche application, la couche transport, la couche réseau, la couche liaison de données, la couche physique, le plan de gestion de l'énergie, le plan de gestion de la mobilité et le plan de gestion des tâches.Le but d'un système en couches est de séparer le problème en différentes parties (les couches) selon leur niveau d'abstraction. Chaque couche du modèle communique avec une couche adjacente (celle du dessus ou celle du dessous). Chaque couche utilise ainsi les services des couches inférieures et en fournit àcelle de niveau supérieur.Le rôle de cette pile consiste àstandardiser la communication entre les participants afin que différents constructeurs puissent mettre au point des produits (logiciels ou matériels) compatibles[2].
6
Figure 1.4 : Pile protocolaire des réseaux de capteurs sans fil[4]
- La couche physique :Comme celle du modèle OSI, cette couche est responsable de la modulation, la détection du signal et la sélection des fréquences porteuses.
- La couche liaison : Cette couche est chargée du contrôle d’erreurs, du multiplexage des flux de données, et le contrôle d’accès au média de transmission.
- La couche réseau :L’objectif de cette couche est de trouver des chemins de routage à faible coût d’énergie pour transmettre les données captées vers la station de base. Ainsi, les protocoles de cette couche doivent toujours prendre en compte les limitations en ressources des nœuds capteurs.
- La couche transport : Son rôle est le contrôle du flux, le découpage, l’ordonnancement et le transport des paquets de données, et la gestion des erreurs de transmission.
- La couche application : Afin de fournir une interface d’interaction avec l’utilisateur humain, les nœuds capteurs peuvent être dotés d’une couche application, dont le rôle est d’implémenter l’ensemble d’applications et de logiciels d’interaction.
- Le plan de gestion d’énergie : Les nœuds capteurs sont sévèrement limités en ressources d’énergie, qui influence directement sur la durée de vie du réseau. Ainsi, le plan de gestion d’énergie doit fournir des mécanismes de gestion efficaces pour réduire le degré de consommation d’énergie, et éliminer les sources de gaspillage de celle-ci.
- Le plan de gestion de mobilité : Ce plan est responsable du contrôle du mouvement des nœuds capteurs dans le cas où ils sont mobiles. Il peut par exemple enregistrer les trajectoires d’un nœud capteur afin de l’aider à se localiser.
C
hapitre 1 Généralité sur réseaux de capteur sans fil7
- Le plan de gestion de tâche :Dans un réseau de capteurs, les nœuds peuvent effectuer des tâches qui se diffèrent en termes de consommation de ressources. Ainsi, un plan de gestion de tâche est souvent nécessaire afin de répartir d’une manière équitable les tâches sur les nœuds capteurs, et offrir ainsi une gestion efficace des ressources disponibles[6].
1.9 Type des réseaux de capteurs sans fil
Les réseaux de capteurs actuels sont déployés sur terre, sous terre et sous l’eau. Selonl’environnement, un réseau de capteurs est confronté à différents défis et contraintes. Il existecinq types de réseaux de capteurs : terrestre, souterrain, sous-marin, multimédia et mobile. Lesréseaux de capteurs terrestres sont généralement constitués de centaines voire de milliersde nœuds capteurs sans fil peu coûteux déployés dans une zone donnée, que ce soit d’unemanière ad hoc ou d’une manière pré-planifiée. Dans un déploiement ad hoc, les nœuds capteurspeuvent être largués d’un avion et placés aléatoirement dans la zone cible. Dans un déploiementpré-planifié, les nœuds se répartissent en grille, en placement optimal , ou en modèles deplacement 2D et 3D .
1.9.1 Les réseaux de capteurs terrestres
Dans un réseau de capteurs terrestre, la communication fiable dans un environnement denseest très importante. Les nœuds capteurs terrestres doivent être capables de communiquer efficacement les données vers la station de base. Alors que l’énergie de la batterie est limitée et ne peutêtre rechargeable, les nœuds capteurs terrestres peuvent être cependant équipés d’une sourced’alimentation secondaire telle que les cellules solaires. Dans tous les cas, il est important deconserver l’énergie pour les nœuds capteurs. Pour un réseau de capteurs terrestre, l’énergie peutêtre conservée avec le routage optimal multi-saut, gamme de transmission courte, agrégationdes données du réseau, en éliminant la redondance des données, en réduisant les délais, et enutilisant les opérations à faible rapport cyclique.
1.9.2 Les réseaux de capteurs souterrains
Les réseaux de capteurs souterrains se composent d’un nombre de nœuds capteursenfouis sous terre ou dans une grotte ou une mine utilisés pour surveiller les conditions souterraines. Les nœuds sink additionnels sont situés au-dessus du sol pour relayer l’informationà partir des nœuds capteurs vers la station de base. Un réseau de capteurs souterrain est pluscher qu’un réseau de capteurs terrestre en termes d’équipement, de déploiement et de maintenance. Les nœuds capteurs souterrains sont chers parce que les pièces d’équipements appropriésdoivent être choisies pour assurer une communication fiable à travers le sol, les roches, l’eauet autres contenus minéraux. Le milieu souterrain rend la communication sans fil un challengeen raison
8
des pertes du signal et des niveaux élevés d’atténuation. Contrairement aux réseauxde capteurs terrestres, le déploiement d’un réseau de capteurs souterrain nécessite une planification minutieuse et une considération d’énergie et de coût. L’énergie est une préoccupationimportante dans les réseaux de capteurs souterrains. Comme dans un réseau da capteurs terrestre, les nœuds capteurs souterrains sont équipés d’une alimentation limitée de la batterie quiest une fois déployée dans le sol, il est difficile de la recharger ou de la remplacer. Comme précédemment, l’objectif essentiel est de conserver l’énergie afin d’augmenter la durée de vie d’unréseau qui peut être atteint par l’implémentation d’un protocole de communication efficace.
1.9.3 Les réseaux de capteurs sous-marins
Les réseaux de capteurs sous-marins se composent d’un nombre de nœuds capteurset des véhicules déployés sous l’eau. A la différence des réseaux de capteurs terrestres, les nœudscapteurs sous-marins sont plus chers et sont moins déployés. Les véhicules sous-marins autonomes sont utilisés pour l’exploration ou la collecte des données de nœuds capteurs. Comparé àun déploiement dense des nœuds capteurs dans un réseau de capteurs terrestre, un déploiementclairsemé de nœuds capteurs est placé sous l’eau. Les communications sans fil sous-marinessont établies par transmission d’ondes acoustiques. Un défi en communication acoustique sous-marine est la bande passante limitée, le long temps de propagation, et le fading du signalissu. Un autre défi est l’échec de nœud capteur en raison des conditions environnementales.
Les nœuds capteurs sous-marins doivent être capables de s’auto-configurer et de s’adapter àl’environnement dur de l’océan. Les nœuds capteurs sous-marins sont équipés d’une batterielimitée qui ne peut être remplacée ou rechargée. La question de la conservation de l’énergiepour les réseaux de capteurs sous-marins consiste à développer des techniques de routage et decommunication sous-marine efficaces.
C
hapitre 1 Généralité sur réseaux de capteur sans fil9 1.9.4 Les réseaux de capteurs multimédias
Les réseaux de capteurs multimédias ont été proposés pour permettre la surveillance etle suivi des événements dans la forme de multimédia comme la vidéo, l’audio et l’image. Lesréseaux de capteurs multimédia se composent d’un certain nombre de nœuds capteurs à faiblecoût équipés de caméras et des microphones. Ces nœuds capteurs interconnectent les uns avecles autres via une connexion sans fil pour la restitution, le traitement, la corrélation et la compression de données. Les nœuds capteurs multimédias sont déployés de manière pré-planifiéedans l’environnement pour garantir une couverture. Les défis dans les réseaux de capteurs multimédias comprennent une forte demande de bande passante, une forte consommation d’énergie,une qualité de service (QoS), des techniques de traitement et de compression de données etune conception inter-couche (cross-layer design). Le contenu multimédia comme un flux vidéonécessite une bande passante élevée afin que le contenu puisse être délivré. En conséquence, undébit élevé de données entraîne une consommation d’énergie élevée. Les techniques de transmission qui prennent en charge une bande passante élevée et une faible consommation d’énergiedoivent être développées. L’approvisionnement de la qualité de service est une tâche difficiledans un réseau de capteurs multimédias en raison de la variable retard et la variable capacitédu canal. Il est important qu’un certain niveau de qualité de service doive être atteint pourune livraison fiable de contenu. En réseau, le traitement, le filtrage et la compression peuventaméliorer considérablement les performances du réseau en termes de filtrage et d’extractiond’informations redondantes et les contenus qui fusionnent. De même, l’interaction cross-layerentre les couches peut améliorer le processus de traitement et de livraison.
1.9.5 Les réseaux de capteurs mobiles
Les réseaux de capteurs mobiles sont constitués d’un ensemble de nœuds capteurs quipeuvent se déplacer par leurs propres moyens et d’interagir avec l’environnement physique.
Comme les nœuds statiques, les nœuds mobiles ont la capacité de collecter, calculer et communiquer. Une différence clé est que les nœuds mobiles ont la possibilité de repositionner et des’organiser en réseau. Un réseau de capteurs mobiles peut commencer avec un déploiement initial et les nœuds peuvent alors s’étaler pour recueillir des informations. L’information recueilliepar un nœud mobile peut être communiquée à un autre nœud mobile quand l’un se trouveà la même portée que l’autre. Une autre différence essentielle est la distribution des données.
10
Dans un réseau de capteurs statique, les données peuvent être distribuées à l’aide de routage oupar inondation alors que le routage dynamique est utilisé dans un réseau de capteurs mobiles.
Les challenges dans un réseau de capteurs mobiles comprennent le déploiement, la localisation,l’auto-organisation, la navigation et le contrôle, la couverture, l’énergie, l’entretien et le traitement des données. Les applications des réseaux de capteurs mobiles incluent la surveillancede l’environnement, le suivi de cible, la recherche, le sauvetage et la surveillance en temps réeldes matières dangereuses. Pour la surveillance de l’environnement dans les zones sinistrées, ledéploiement manuel pourrait ne pas être possible. Avec les nœuds capteurs mobiles, ils peuventse déplacer dans les zones d’événements après le déploiement pour fournir la couverture nécessaire. Dans la surveillance et le suivi militaire, les nœuds capteurs mobiles peuvent collaboreret prendre des décisions fondées sur la cible. Les nœuds capteurs mobiles peuvent atteindre un degré de couverture et une connectivité plus élevés par rapport aux nœuds capteurs statiques. En présence d’obstacles sur le terrain, les nœuds capteurs mobiles peuvent être planifiés à l’avance et déplacés de manière appropriée aux régions obstruées pour augmente l’exposition de la cible[7].
1.10 Applications des RCSFs
Les RCSFs est une nouvelle technologie, qui est actuellement largement répandue dans plusieurs domaines variés ; ses applications accroissent chaque jour. Harnando et al. les décomposent en quatre catégories, représentées dans la figure 1.6 et qui sont : les applications environnementales, les applications dans la santé, les applications dans la sécurité, et autres applications additionnelles[4].
C
hapitre 1 Généralité sur réseaux de capteur sans fil11
Figure 1.5 : Applications des RCSFs[4]
- Applications environnementales
Les réseaux de capteurs sans fil peuvent être utilisés afin de surveiller des phénomènes environnementaux. Ainsi, ils sont déployés dans les forêts afin de détecter et de signaler un éventuel début d’incendie. Les capteurs peuvent aussi être semés avec les graines, afin de contrôler l’arrosage des plantes. Dans le domaine industriel, les capteurs sont généralement utilisés afin de détecter des fuites de produits toxiques, ou pour la surveillance des paramètres critiques tels que la température d’un réacteur nucléaire.
- Applications médicales
La surveillance des fonctions vitales de l'être humain peut être effectuée avec des micros-capteurs avalés ou implantés sous la peau des malades. Des capteurs peuvent être implantés à l'intérieur du corps humain pour traiter certains types de maladies (tel que la détection de cancers) ou pour collecter des informations physiologiques (tel que la surveillance du niveau de glucose), ou encore pour le monitoring des organes vitaux.
- Applications à la sécurité
La sécurité représente un domaine d’application très important pour les RCSFs. En effet, des capteurs peuvent êtres dans les bâtiments afin de détecter les altérations dans leur structure. En outre, Un réseau de capteurs peut constituer un système d'alarme distribué, qui servira àdétecter les intrusions sur un large secteur. Un tel système de sécurité sera très robuste étant donné qu’il ne contient pas de point critique pour le
12
déconnecté. Parmi les autres applications de sécurité, on peut citer la surveillance de voies ferrées, pour prévenir des accidents avec des animaux et des êtres humains, ou la détection de fuites d'eau dans les barrages afin d'éviter les dégâts éventuels[6].
- Autres applications additionnelles
D'autres applications de RCSFs peuvent être citées à savoir : la surveillance structurale, le suivi et le contrôle de construction, la surveillance automobile, la surveillance du trafic, le contrôle des processus industriels, et la surveillance des entrepôts [4].
1.11 Conclusion
Ce chapitre a été parlésur, des généralités sur les RCSFssont présentées à savoir l’architecture d’un nœud capteur et d’un réseau de capteurs, la pileprotocolaire, les facteurs et contraintes, types des RCSFs, classification des applications desRCSFs.Les deux prochains chapitres présentent les protocoles des RCSFs.
Chapitre 2
Couche réseaux
Sommaire
2.1 Introduction ... 13
2.2Classification des protocoles de routage pour les RCSF ... 14
2.2.1Selon la topologie (structure) du réseau ... 15
2.2.2 Selon les paradigmes de communication ... 16
2.2.3 Selon le mode de fonctionnement du protocole ... 17
2.2.4 Selon le mode l'établissement des chemins ... 18
2.3Les protocoles de routage dans les RCSF ... 19
2.3.1Le protocol LEACH (Low Energy Adaptive Clustering Hierarchy) ... 19
2.3.2. Le protocol PEGASIS (Power-Efficient Gathering in Sensor Information Systems)…… 23
2.3.3. HEED (Hybrid, Energy-Efficient, Distributed approach) ... 25
2.3.4. Directed Diffusion (DD) ... 26
2.3.5 Geographic and Energy Aware Routing(GEAR) ... 26
2.3.6 Minimum Energy Communication Network(MECN) ... 27
2.3.7 Threshold sensitive Energy Efficient sensor Network protocol(TEEN et APTEEN) ... 27
2.3.8 Geographic Adaptive Fidelity (GAF) ... 28
2.3.9 Constrained Anisotropic Diffusion Routing (CADR) ... 29
2.3.10 COUGAR ... 30
2.4Comparaison des protocoles de routage ... 32
2.5Avantage et inconvénients des protocoles de routage ... 33
Chapitre 2 Protocoles de Couche réseaux
2.1 Introduction
Couche réseau est la couche responsable sur l’opération routage, il décide du routage des paquets en fonction des requêtes, évènements,…
Le routage dans les réseaux de capteurs sans fil est la procédure d’acheminement d’informations d’un nœud source collecteur vers une destination à travers un réseau de connexion. Chaque nœud est susceptible d’être à la disposition des autres nœuds capteurs pour participer à la transmission et retransmission des informations émises sur le réseau par un ou un ensemble de nœuds n’ayant pas la possibilité d’atteindre directement la destination.
Les techniques de routage sont nécessaires pour envoyer des données entre les nœuds de capteurs et la station de base. Plusieurs protocoles de routage sont proposés pour les réseaux de capteurs. Ces protocoles peuvent être répartis dans les catégories suivantes: protocoles centrés sur les données, protocoles hiérarchiques, protocoles basés sur la localisation et certains protocoles compatibles QoS. Nous étudions dans ce chapitre les protocoles liés par chaque catégorie.
Chapitre 2 Protocoles de Couche réseaux
2.2 Classification des protocoles de routage pour les RCSF
Classification des protocoles de routage pour les RCSFs SPIN, DD, RR, CADR, Plate
Topologies du COUGAR, AQUIRE
Réseau LEACH, PEGASIS Hiérarchique MECN, SMECN, TEEN, APTEEN
Basé-QoS SAR, SPEED…
Basé-Négociation SPIN Fonctionnement du protocole Multi-chemins DD Basé-Requêtes DD, RR Centré-données SPIN, DD Paradigme de Centré- nœuds LEACH, PEDAP communication
Basé-localisation GAF, GEAR, VGA
Réactif SPIN, DD, COUGAR,
AQUIRE
Etablissement de la Proactif LEACH, PEGASIS
route Hybride APTEEN Event-driven Type d’application Time-driven
Initiée par lasource DSR
Origine de la
requête Initiée par
ladestination Découverte Mode de RR,DD fonctionnement Interrogation Acheminement
Figure 2.1 : classification des protocoles des routages pour RCSFs[8] .
Chapitre 2 Protocoles de Couche réseaux
2.2.1 Selon la topologie (structure) du réseau
La topologie détermine l'organisation des capteurs dans le réseau. Globalement, il existe deux topologies dans les RCSFs : la topologieplate et la topologie hiérarchique.
a. Topologie plate
Dans une topologie plate, tous les nœuds capteurs possèdent le même rôle et collaborent entre eux pour accomplir la tâche de routage. Les réseaux plats sont caractérisés par : la simplicité des protocoles de routage, un coût de maintien réduit, une grande tolérance aux pannes ainsi qu’une habilité à construire de nouveaux chemins suite aux changements de topologie. Cependant, Les nœuds proches du puits participent plus que les autres aux tâches de routage. De plus, ces réseaux présentent une faible scalabilité dû au fonctionnement identique des nœuds et d’une manière distribuée nécessitant ainsi un grand nombre de messages de contrôle. La figure suivante illustre l’organisation des capteurs dans une topologie plate.
Par exemple : le protocole COUGAR liée à cette topologie.
Figure 2.2 :Topologieplate[8]. b. Topologie hiérarchique
Dans une topologie hiérarchique, les nœuds ont des différents rôles. En effet, certains nœuds sont sélectionnés pour exécuter des fonctionsparticulières. Une des méthodes les plus utilisées dans cette topologie est le clustering. Il consiste en un partitionnement du réseau en groupes appelés clusters. Un cluster est constitué d'un chef (cluster-head) et de ses membres. Suivant l'application, les membres peuvent être des voisins directs du chef ou pas.
Cette topologie présente beaucoup d’avantages tels que l’agrégation des données collectées ainsi qu’une grande scalabilité. Son inconvénient majeur est la surcharge des cluster-heads qui induit un déséquilibre de la consommation d’énergie dans le réseau. Pour remédier à ce problème, cluster-heads peuvent être des capteurs spécifiques avec plus de ressources énergétiques et plus de capacités de traitement ou bien ils peuvent être élus dynamiquement et ainsi garantir un équilibre de la consommation d’énergie et augmenter la tolérance aux pannes.
Chapitre 2 Protocoles de Couche réseaux
Un exemple de cette topologie est donné dans la figure 2.3 ci-dessous.Pour que les paquets générés par le nœud F atteignent le nœud L, ils doivent passer par les passerelles P, S et R. Par exemple : le protocole PEGASIS liée à cette topologie.
Figure 2.3 :.Routage hiérarchique[8]. 2.2.2 Selon les paradigmes de communication
Le paradigme de communication détermine la manière dont les nœuds sont interrogés. Dans les RCSFs, il existe trois paradigmes de communication : centré-nœuds, centré-données et basé sur la localisation.
a. Centré-nœuds (Node-centric)
Ce paradigme est celui employé dans les réseaux conventionnels, où il est nécessaire de connaître et d’identifier les nœuds communicants (comme l’adresse IP). Les réseaux ad hoc utilisent ce genre de paradigme, qui s'intègre bien avec l'utilisation de ce type d'environnement. Cependant, pour les réseaux de capteurs, un routage basé sur une identification individuelle des nœuds ne reflète pas l'usage réel du réseau.Pour cela, un autre paradigme a été introduit : data centrique. Néanmoins, le paradigme nœudcentriquen'est pas à écarter totalement, car certaines applications nécessitent une interrogation individuelle des capteurs.
Par exemple : le protocole PEDAP liée à cette paradigme.
b. Centré-données (Data-centric)
Ce paradigme suppose qu’il est difficile d’avoir des identifiants comme les adresses MAC ou IP pour pouvoir communiquer entre les nœuds capteurs.Ainsi, le routage ne se fait pas en fonction d'une adresse de destination, mais suivant les données disponibles au niveau des capteurs. Ces données seront propagées de proche en proche pour arriver au nœud puits.
Par exemple : le protocole DD liée à cetteparadigme.
c. Basé-localisation (location-based)
Dans cette approche, les décisions de routage sont établies selon la position des nœuds.
Chapitre 2 Protocoles de Couche réseaux
La distance entre les nœuds voisins peut être estimée sur la base de la puissance du signal arrivé. Un tel type de routage nécessite que les nœuds aient connaissance de leurs positions géographiques. Par conséquent, ce type de mécanismes nécessite un déploiement d'une solution de positionnement, dont le degré de précision requis dépend de l'application ciblée. L'utilisation du GPS reste trop coûteuse pour un RCSF. Néanmoins, d’autres méthodes de localisation et de positionnement des capteurs ont été développées comme par exemple la triangulation. Parmi ces protocoles géographiques, on peut mentionner le protocole MECN.
2.2.3 Selon le mode de fonctionnement du protocole
Le mode de fonctionnement définit la manière avec laquelle les données sont propagées dans le réseau. Selon ce critère, les protocoles deroutage peuvent être classifiés en quatre catégories : routage basé sur la Qualité de Service"QdS" (Qualityof Service "QoS" based routing), routage basé sur les requêtes (query-based routing), routage multi-chemins (Multi-path routing), et routage basé sur la négociation (Negociation based routing).
a. Routage basé sur les multi-chemins
Dans cette catégorie, les protocoles de routage utilisent des chemins multiples plutôt qu'un chemin simple afin d'augmenter la performancedu réseau. La fiabilité d'un protocole peut être mesurée par sa capacité à trouver des chemins alternatifs entre la source et la destination en cas de défaillance du chemin primaire. Pour cette raison, certains protocoles construisent plusieurs chemins indépendants,c.-à-d. : ils ne partagent qu'un nombre réduit (voir nul) de nœuds. Malgré leur grande tolérance aux pannes, ces protocoles requièrent plus de ressources énergétiques et plus de messages de contrôle.
Par exemple : le protocole DD liée à cette fonctionnement.
b. Routage basé sur les requêtes
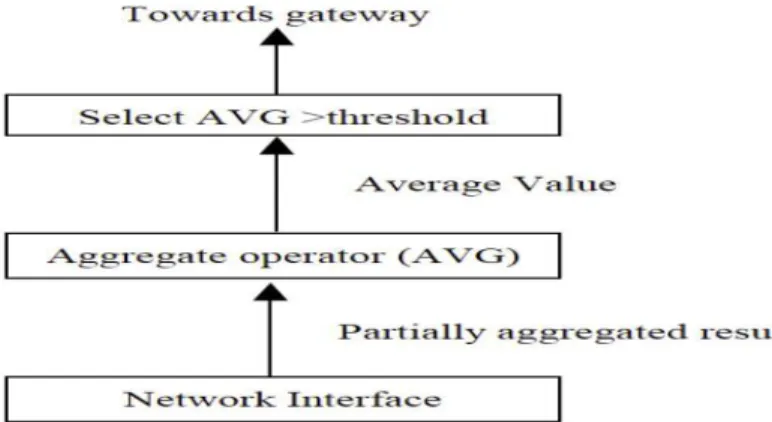
Dans cetype de routage, le puits génère des requêtes afin d'interroger les capteurs.
Ces requêtes sont exprimées soit par un schéma valeur-attribut ou bien en utilisant un langage spécifique (par exemple SQL : Structured Query Language). Les nœuds qui détiennent les données requises doivent les envoyer au nœud demandeur à travers le chemin inverse de la requête. Les requêtes émises par le puits peuvent aussi être ciblées sur des régions spécifiques du réseau. Par exemple : le protocole RR liée à cette fonctionnement.
c. Routage basé sur la négociation
En détectant le même phénomène, les nœuds capteurs inondent le réseau par les mêmes paquets de données. Ce problème de redondance peut être résolu en employant des protocoles de routage basés sur la négociation. En effet, avant de transmettre, les nœuds capteurs
Chapitre 2 Protocoles de Couche réseaux
négocient entre eux leurs données en échangeant des paquets de signalisation spéciales, appelés métadonnées. Ces paquets permettent de vérifier si les nœuds voisins disposent déjà de la donnée à transmettre. Cette procédure garantit que seules les informations utiles seront transmises et élimine laredondance des données.
Par exemple : le protocole SPIN liée à cette fonctionnement.
d. Routage basé sur la qualité de service
Dans les protocoles de routage basés sur QoS, le réseau doit équilibrer entre la consommation d'énergie et la qualité de données. En particulier, le réseau doit satisfaire certaines métriques de QoS, par exemple, retard, énergie, largeur de bande passante, etc. Les protocoles de cette approche sont très recommandés pour les applications de surveillance (centrales nucléaires, applications militaires, etc). Par exemple : le protocole SAR liée à cette fonctionnement.
2.2.4 Selon le mode l'établissement des chemins
Suivant la manière de création et de maintien des chemins pendant le routage, nous distinguons trois catégories de protocoles de routage : les protocoles proactifs, les protocoles réactifs et les protocoles hybrides.
a. Les protocoles proactifs
Utilisent l'échange régulier de messages de contrôle pour maintenir au niveau de chaque nœud des tables de routage (qui associent à chaque destination ou groupe de destinations un voisin direct par lequel les paquets doivent être relayés) vers toute destination atteignable depuis celui-ci. Ces tables sont maintenues même quand les routes ne sont pas utilisées. Cette approche permet de disposer d'une route vers chaquedestination immédiatement au moment où un paquet doit être envoyé. Les protocoles proactifs sont adaptés aux applications qui nécessitent un prélèvement périodique des données. Et par conséquent, les capteurs peuvent se mettre en veille pendant les périodes d'inactivité, et n'enclencher leur dispositif de capture qu'à des instants particuliers. Par exemple : le protocole LEACH liée à cette mode.
b. Les protocoles réactifs
Dits aussi les protocoles de routage à la demande, créent et maintiennent les routes selon les besoins. Lorsqu'un nœud à besoin d'une route, une procédure de découverte globale est lancée. Cette procédure s'achève par la découverte de la route ou lorsque toutes les permutations de routes possibles ont été examinées.La route trouvée est maintenue par une procédure de maintenance de routes jusqu'à ce que la destination soit inaccessible à partir du nœud source ou que le nœud source n'aura plus besoin de cette route.
Chapitre 2 Protocoles de Couche réseaux
Par exemple : le protocole AQUIRE liée à cette mode.
c. Protocoles hybrides
Ces protocoles combinent les deux idées des protocoles proactifs et réactifs. Ils utilisent un protocole proactif pour apprendre le proche voisinage (par exemple le voisinage à deux ou à trois sauts), ainsi, ils disposent de routes immédiatement dans le voisinage. Au-delà de la zone du voisinage, le protocole hybride fait appel à un protocole réactif pour chercher des routes. Dans le reste de cette section, nous présentons une vue d'ensemble détaillée des principaux protocoles de routage dans les RCSFs appartenant à ces classes. Par exemple : le protocole APTEEN liée à cette mode[8].
2.3
Les protocoles de routage dans les RCSF
Les protocoles de routage destinés pour la gestion efficace d’énergie, représentent la majorité des recherches proposées au niveau de la couche réseau. L’idée de base de cette catégorie de protocoles est la construction des chemins de routage à faible consommation énergétique (energy aware routing path). De nombreuses stratégies de routage ont été créées pour les réseaux de capteurs sans fil. Certaines sont des adaptations de stratégies qui existaient pour d'autres types de réseaux (principalement pour les réseaux sans fil au sens le plus large), tandis que d'autres ont été conçues spécialement pour les réseaux de capteurs sans fil.
Nousdécrivons dans la section suivante les principaux protocoles classiques de routage destinés à l’économie d’énergie dans les RCSF.
2.3.1 Le protocol LEACH (Low Energy Adaptive Clustering Hierarchy)
LEACH est un protocole auto-organisateur basé sur le clustering adaptatif, qui utilise la rotation randomisée des têtes de cluster pour distribuer équitablement la charge d'énergie entre les nœuds capteurs dans le réseau. Ce dernier est considéré comme étant l'une des premières approches de routage hiérarchique basées sur le clustering. LEACH est fondé sur deux hypothèses de base dans lesquelles la station de base est fixée et est placée loin des capteurs. De plus, tous les nœuds du réseau sont supposés homogènes et limités en énergie.
Chapitre 2 Protocoles de Couche réseaux
Figure 2.4: Algorithme de routage LEACH[6].
L'idée derrière LEACH est de former des clusters de nœuds capteurs selon la force reçue du signal, et d'utiliser les chefs des clusters comme des routeurs pour transférer les données à la station de base. Les dispositifs principaux de LEACH sont :
- La coordination et le contrôle localisés : pour l'initialisation et le traitement de grappe.
- La rotation randomisée du rôle du CH : effectuée par la station de base ou les têtes de cluster. - Compression locale (agrégation) : les nœuds CH compressent les données arrivant des nœuds appartenant à leurs grappes respectives, et envoient un paquet d'agrégation à la station de base, afin de réduire la quantité d'information qui doit être transmise.
Dans LEACH, le traitement est séparé dans des cycles de longueur constante, où chaque cycle commence par une phase d'initialisation suivie d'une phase de transmission. Dans la premièrephase, les clusters sont organisés et les CHs sont sélectionnés. Cette élection est basée sur le pourcentage désiré de CHs et le nombre d’itérations au cours desquelles un nœud a pris le rôle de CH. Ainsi, un nœud n prend une valeur aléatoire entre 0 et 1. Si cette valeur est inférieure au seuil T (n), le nœud se déclare CH.
Avec : P : pourcentage désiré de CHs. r : itération actuelle.
G : ensemble des nœuds qui ont pas été sélectionnés comme CH durant les dernières (1/P) itérations.
Chaque CH élu émet un message de signalisation au reste des nœuds dans le réseau afin de les informer de son élection comme nouveau CH. Tous les nœuds non CH, et après avoir reçu ce
Chapitre 2 Protocoles de Couche réseaux
message, décident du cluster auquel ils veulent appartenir. Cette décision est basée sur la force du signal du message reçu. Les nœuds non CH informent les CH appropriés qu'ils seront membres de leurs clusters. Après la réception de tous les messages des nœuds qui voudraient être inclus dans la grappe, et basé sur le nombre de nœuds dans celle-ci, le nœud CH créé un plan de transmission et assigne à chaque nœud un slot de temps durant lequel il peut transmettre. Ce plan est émis à tous les nœuds dans la grappe. L’algorithme LEACH utilise la technique de multiplexage temporel TDMA (Time division multiplexed access) comme méthode d’accès au médium. Chaque nœud utilise la totalité de la bande passante allouée par le système de transmission durant son slot de temps. De plus, les nœuds peuvent passer à l’état "endormi" durant les slots inactifs. Ainsi, la perte d’énergie due aux états de sur-écoute (overhearing) et d’écoute passive (idle) est évitée.
Dans la deuxième phase, le transfert des données collectées à la station de base a lieu. La durée de la deuxième phase est plus longue que celle de la première phase afin de réduire au minimum les problèmes d’oveheading. Cependant, la collection de données est centralisée et est exécutée périodiquement. Par conséquent, ce protocole s'avère le plus approprié quand on constate un besoin de surveillance de constante par le réseau de capteurs. Après un intervalle de temps donné, une rotation randomisée du rôle du CH est conduite de sorte que la dissipation uniforme d'énergie dans le réseau de capteurs soit obtenue. Les auteurs ont trouvé, en se basant sur leur modèle de simulation, que seulement 5% des nœuds ont besoin d'agir comme leaders. Malgré le fait que LEACH permet de réduire la dissipation d'énergie, d’optimiser l’utilisation de largeur de bande et de ne pas gaspiller les réserves d'énergie, un nombre d’inconvénients restent plus au moins apparents. Nous citons parmi eux :
-
L’idée de formation de grappes augmente le nombre de messages échangés entre les nœuds, qui peuvent diminuer le gain dans la consommation d’énergie ;-
Les nœuds les plus éloignés du CH meurent rapidement par rapport à ceux plus proches (communication à un seul saut);-
Le nombre de messages reçus par les CHs équivaut, approximativement, celui des nœuds gérés. Ceci mène à l’épuisement rapide de leur réserve d’énergie ;-
L’utilisation de single-hop (un saut) au lieu de multi-hop (multi sauts) épuise rapidement l’énergie des nœuds et consomme d’avantage de largeur de bande.-
LEACH suppose que tous les nœuds peuvent transmettre avec une énergie assez suffisante pour atteindre la BS si nécessaire. Ce qui n’est pas toujours le cas.Chapitre 2 Protocoles de Couche réseaux
-
Il ne peut pas être appliqué à des applications avec une contrainte de temps du fait qu’il résulte en une longue latence[6].a. Les protocoles LEACH-C et LEACH-F
Nous avons retenu les travaux de Heinzelman et al, qui présentent aujourd’hui d’excellents résultats en termes d’économie d’énergie. Ces derniers ont proposé le protocole LEACH et une version centralisée de ce protocole, appelé LEACH-C. Tous deux s’appuient sur le clustering, qui consiste, de façon similaire aux réseaux téléphoniques cellulaires, à partitionner le réseau en groupes (clusters).
Les nœuds transmettent leurs données vers des représentants de groupes dits clusterheads (CHs), qui à leur tour envoient ces données vers la destination désirée ou la station de base. Dans certaines applications les clusterheads font des traitements simples (agrégations par exemple) sur les données reçues avant de les retransmettre à la station de base.
Cette approche permet la réutilisation de la bande passante. Elle offre aussi une meilleure allocation de ressources et aide à améliorer le contrôle de l’énergie dans le réseau.
(LEACH-C) permet de déterminer, à partir de la position exacte des nœuds, la configuration optimale pour minimiser l’énergie dépensée. LEACH-C (LEACH-CENTRALISE) est une variante de LEACH où les grappes sont formées d’une manière centralisée par la station de base. LEACH-C utilise la même étape de transmission que LEACH. Durant la phase d’initialisation la BS reçoit de chaque nœud des informations concernant leur localisation, et leur réserve d’énergie. Ensuite, elle exécute un algorithme de formation de grappes centralisé afin de former les grappes et sélectionner leurs CHs. LEACHC utilise l’algorithme de la réussite simulée pour obtenir des grappes optimales. Dès que les grappes sont formées, la station de base envoie ces informations à tous les nœuds du réseau. Cependant,la version centralisée de LEACH n’est pas adaptée aux réseaux de grande dimension.
Un développement ultérieur est LEACH-F (LEACH avec grappes fixes). LEACH-F est basé sur les grappes qui sont formés une fois - et puis sont fixées. Ensuite, la position de tête de grappes tourne parmi les nœuds dans la grappe. L’avantage est que, une fois que les grappes sont formées, aucune autre phase d’initialisation aura lieu, LEACH-F utilise le même algorithme centralisé de formation de grappe que LEACH-C. Les grappes fixes dans LEACHF ne permettent pas à de nouveaux nœuds d’être ajoutés au système et n’ajustent pas leur comportement basé sur la mort de nœuds[9].
Chapitre 2 Protocoles de Couche réseaux
2.3.2. Le protocol PEGASIS (Power-Efficient Gathering in Sensor Information Systems)
L’idée de base du protocole PEGASIS est que, dans le but de prolonger la durée de vie du réseau, les nœuds vont être organisés de telle sorte à ce qu’ils forment une chaîne, et n’auront ainsi besoin de communiquer qu’avec seulement leurs voisins les plus proches, et se relaient dans la communication avec la station de base. Ceci réduit l’énergie exigée pour transmettre des données par cycle du moment que la dissipation d’énergie est diffusée uniformément sur tous les nœuds. Par conséquent, PEGASIS a deux principaux objectifs. D'abord, augmenter la durée de vie de chaque nœud en employant les techniques de collaboration, ce qui permet d’augmenter par conséquent la durée de vie du réseau. En second lieu, permettre seulement la coordination locale entre les nœuds voisins de sorte que la largeur de bande consommée dans la communication soit réduite.
À la différence de LEACH, PEGASIS évite la formation des clusters et n’utilise qu’un seul nœud dans une chaîne afin de transmettre à la BS, au lieu d’en utiliser plusieurs. La forme agréée des données sera envoyée à la station de base par n'importe quel nœud dans la chaîne, et les nœuds dans cette dernière vont se relayer pour la transmission à la station de base. Les nœuds vont être organisés de sorte qu'ils forment une chaîne qui peut être soit calculée d'une façon centralisée par la BS et émise à tous les nœuds, ou accomplie par les nœuds capteurs euxmêmes en employant un algorithme spécial (greedy algorithme). Dans le cas où la chaîne est calculée par les nœuds capteurs, ils doivent d'abord obtenir toutes les données sur l'emplacement des nœuds capteurs, et forment ensuite localement la chaîne en se basant sur les informations de localisation. Puisque tous les nœuds ont les mêmes données d'emplacement et exécutent le même algorithme, ils vont tous produire le même résultat.
Pour construire la chaîne, PEGASIS commence avec le nœud le plus éloigné de la BS. Le voisin le plus proche de ce nœud sera le nœud suivant dans la chaîne. Les voisins successifs sont sélectionnés de cette manière parmi les nœuds non visités afin de former la chaîne de nœuds. La figure 2.3 montre le nœud c0 se reliant au nœud c3, le nœud c3 se reliant au nœud c1, et le nœudc1 se reliant au nœud c2, dans cet ordre. Quand un nœud meure, la chaîne est reconstruite de la même manière pour dévier le nœud mort.
![Figure 1.4 : Pile protocolaire des réseaux de capteurs sans fil[4]](https://thumb-eu.123doks.com/thumbv2/123doknet/2319626.28643/22.892.245.698.112.479/figure-pile-protocolaire-reseaux-capteurs-fil.webp)
![Figure 1.5 : Applications des RCSFs[4]](https://thumb-eu.123doks.com/thumbv2/123doknet/2319626.28643/27.892.132.799.131.510/figure-applications-des-rcsfs.webp)
![Figure 2.1 : classification des protocoles des routages pour RCSFs[8] .](https://thumb-eu.123doks.com/thumbv2/123doknet/2319626.28643/31.892.51.856.123.1135/figure-classification-des-protocoles-des-routages-pour-rcsfs.webp)
![Figure 2.2 :Topologieplate[8]. b. Topologie hiérarchique](https://thumb-eu.123doks.com/thumbv2/123doknet/2319626.28643/32.892.284.615.536.670/figure-topologieplate-b-topologie-hierarchique.webp)
![Figure 2.3 :.Routage hiérarchique[8]. 2.2.2 Selon les paradigmes de communication](https://thumb-eu.123doks.com/thumbv2/123doknet/2319626.28643/33.892.248.654.267.415/figure-routage-hierarchique-paradigmes-communication.webp)
![Figure 2.4: Algorithme de routage LEACH[6].](https://thumb-eu.123doks.com/thumbv2/123doknet/2319626.28643/37.892.262.625.108.331/figure-algorithme-de-routage-leach.webp)
![Figure 2.6 : Clustering hiérarchique dans TEEN et APTEEN[7].](https://thumb-eu.123doks.com/thumbv2/123doknet/2319626.28643/44.892.239.675.807.1021/figure-clustering-hierarchique-dans-teen-apteen.webp)
![Figure 2.7 : Transitions des états dans GAF[7].](https://thumb-eu.123doks.com/thumbv2/123doknet/2319626.28643/46.892.238.657.257.490/figure-transitions-etats-gaf.webp)