Système optique d'imagerie haut contraste embarqué
sur un ballon stratosphérique
Mémoire
Mireille Ouellet
Maîtrise en physique - avec mémoire
Maître ès sciences (M. Sc.)
Résumé
Plusieurs projets de télescopes spatiaux ont pour objectif d’étudier des exoplanètes en ayant recours à des techniques d’imagerie directe à haut contraste. Afin d’atteindre une différence de contraste requise entre la lumière de l’étoile et celle réfléchie par l’exoplanète, ses sys-tèmes doivent utiliser un coronographe pour occulter la lumière de l’étoile et corriger en temps réel les erreurs de front d’onde avec des techniques d’optique adaptative. Les aber-rations sont détectées par un analyseur de front d’onde, puis une boucle de contrôle envoie une commande qui modifie la surface d’un miroir déformable pour compenser les erreurs de front d’onde. Les performances des systèmes d’optiques adaptatives sont cependant sou-vent limitées par la présente d’erreurs quasi statiques qui sont causées par la différence de trajet optique entre la caméra de science et le senseur de front d’onde.
Un système d’imagerie haut contraste a donc été développé pour démontrer le potentiel d’une technique de contrôle qui permet d’éliminer cette source d’erreur. Cette boucle de contrôle a la particularité d’utiliser un coronographe qui permet d’analyser les erreurs de front d’onde directement à partir de l’image de la caméra de science. Le système optique développé dans le cadre de ce mémoire a été testé en laboratoire et a également été optimisé pour réaliser une démonstration fonctionnelle dans des conditions similaires à l’espace lors d’un vol de ballon dans la stratosphère. Les résultats de vol ont permis de valider la ma-turité technologique de certaines composantes qui ont le potentiel d’être utilisées pour les prochaines générations de télescopes spatiaux.
Abstract
Several space telescope projects aim to study exoplanets using high-contrast direct imaging techniques. In order to achieve the required difference in contrast between the light from the star and that reflected by the exoplanet, those systems must use a coronagraph to mask the light of the star and correct in real time wavefront errors with adaptive optics techniques. The aberrations are detected by a wavefront sensor, then a control loop sends a command that modifies the surface of a deformable mirror to compensate for the wavefront errors. However, the performance of adaptive optics systems is often limited by the present quasi-static errors that are caused by the optical path difference between the science camera and the wavefront sensor.
A high contrast imaging system has been developed to demonstrate the potential of a con-trol technique which enables the reduction of this kind of error. This concon-trol loop has the particularity of using a coronagraph which allows the analyze of the wavefront errors di-rectly from the science camera’s image. The optical system developed within the framework of this master’s project has been tested in a laboratory and was also optimized to perform a functional demonstration in space-like conditions during a balloon flight in the stratosphere. The flight results validated the readiness level of some components that could potentially be used for the next generation of space telescopes.
Table des matières
Résumé ii
Asbtract iii
Table des matières iv
Liste des tableaux vii
Liste des figures ix
Remerciements xvii introduction 1 1 Théorie 3 1.1 Technique de coronographie . . . 3 1.1.1 Coronographe de Lyot . . . 3 1.1.2 Masque de phase . . . 4 1.1.3 Masque d’amplitude . . . 4
1.1.4 Coronographe utilisant l’interférométrie . . . 4
1.1.5 Masque d’occultation externe . . . 5
1.2 Métriques de performance . . . 5
1.2.1 Couverture angulaire . . . 6
1.2.2 Position radiale du début de la zone de contraste . . . 6
1.2.3 Niveau de contraste . . . 6
1.3 Système d’optique adaptative . . . 7
1.3.1 Présence d’erreurs quasi statiques . . . 7
1.4 Introduction au coronographe de type vAPP . . . 8
1.4.1 Principe de fonctionnement du cMWFS . . . 9
1.4.2 Génération des hologrammes . . . 10
1.4.3 Commande de correction pour le miroir déformable. . . 11
1.4.4 Fabrication du vAPP . . . 12
1.4.5 Compromis sur les performances. . . 13
2 Design et tolérancement 15 2.1 Mise en contexte. . . 15
2.1.1 Présentation des objectifs du projet. . . 15
2.1.3 Contexte du projet HiCIBaS . . . 16
2.1.4 Conditions d’observation à bord d’un ballon stratosphérique . . . 16
2.1.5 Définition des requis . . . 19
2.2 Sélection des composantes pour la boucle de contrôle (AO) . . . 20
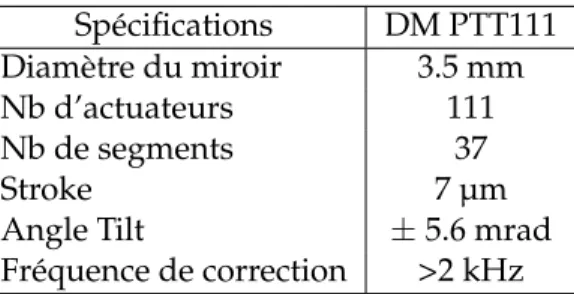
2.2.1 Miroir déformable PTT111 (Iris AO) . . . 20
2.2.2 Caméra EMCCD HNÜ512 (Nüvü) . . . 21
2.3 Design optique du système . . . 22
2.4 Analyse complémentaire de performances. . . 24
2.4.1 Système télécentrique . . . 24
2.4.2 Présence d’images fantômes. . . 25
2.5 Analyse thermique . . . 25
2.5.1 Méthodologie pour l’optimisation du design . . . 26
2.5.2 Impact de la pression et de la température sur les performances optiques . . . 26
2.5.3 Conclusions . . . 27
2.6 Design du masque de phase . . . 28
2.6.1 Sélection du design de masque de phase . . . 29
2.7 Figure de diffraction causée par la segmentation du miroir . . . 30
2.7.1 Position radiale des pics de diffraction. . . 33
2.7.2 Intensité des premiers pics de diffraction . . . 34
2.8 Tolérancement . . . 36
2.9 Bras de calibration . . . 38
2.9.1 Design optique . . . 38
2.9.2 Analyse des performances. . . 40
2.10 Impact de la dispersion chromatique . . . 40
2.11 Budget de photons . . . 42
3 Validation en laboratoire 46 3.1 Tests en chambre environnementale . . . 46
3.1.1 Miroir déformable . . . 46
3.1.2 Masque de phase . . . 48
3.1.3 Caméra EMCCD 512 . . . 48
3.1.4 Mesure du défocus thermique du télescope . . . 48
3.1.5 Sélection d’un matériel d’impression 3D résistant au conditions ex-trêmes . . . 52
3.1.6 Performance de la diode laser en fonction de la température . . . . 53
3.2 Banc de test pour les composantes du système d’AO. . . 55
3.2.1 Caractérisation du miroir déformable . . . 56
3.2.2 Masque de phase vAPP . . . 57
3.2.3 Analyse de la dispersion chromatique . . . 58
3.3 Tests d’intégration sur le banc optique d’HiCIBaS . . . 60
3.3.1 Validation des tolérances pour l’optomécanique . . . 60
3.3.2 Présence de réflexion indésirable . . . 60
3.3.3 Source de calibration . . . 62
4 Alignement et intégration 65 4.1 Procédure d’alignement du système HiCIBaS . . . 65
4.1.2 Positionnement de la source fibrée sur le télescope d’alignement . 67
4.1.3 Alignement des deux télescopes . . . 68
4.1.4 Positionnement du banc optique par rapport au télescope . . . 70
4.1.5 Alignement du Front-End et des sous-systèmes . . . 71
4.2 Validation de l’alignement entre le vAPP et le DM . . . 73
4.2.1 Conclusions . . . 75
4.3 Test suspendu . . . 75
5 Performances à Timmins 78 5.1 Performances finales avant la mission . . . 78
5.1.1 Résultats avec la source blanche . . . 78
5.1.2 Résultats avec la source de calibration . . . 80
5.2 Résultats pendant le vol . . . 83
5.3 Diagnostic des systèmes après vol . . . 85
5.3.1 Vérification de la source de calibration. . . 85
5.3.2 Fonctionnalité du miroir déformable . . . 86
Conclusion 90 A Tests complémentaires en chambre environnementale 96 A.1 Mesure du défocus thermique du télescope . . . 96
B Informations supplémentaires pour l’utilisation du DM 98 B.1 Conseils d’utilisation . . . 98
B.2 Méthodologie pour optimiser l’alignement des segments . . . 99
B.2.1 Vérification du fonctionnement des segments . . . 99
B.2.2 Procédure d’alignement . . . 99
B.2.3 Déterminer la consigne de surface plane. . . 99
B.2.4 Compensation d’erreur de gravité . . . 100
C Informations supplémentaires sur les procédures d’alignement 101 C.1 Conseils pour l’utilisation du Hotech . . . 101
C.2 Critiques sur les stratégies d’alignement . . . 102
Liste des tableaux
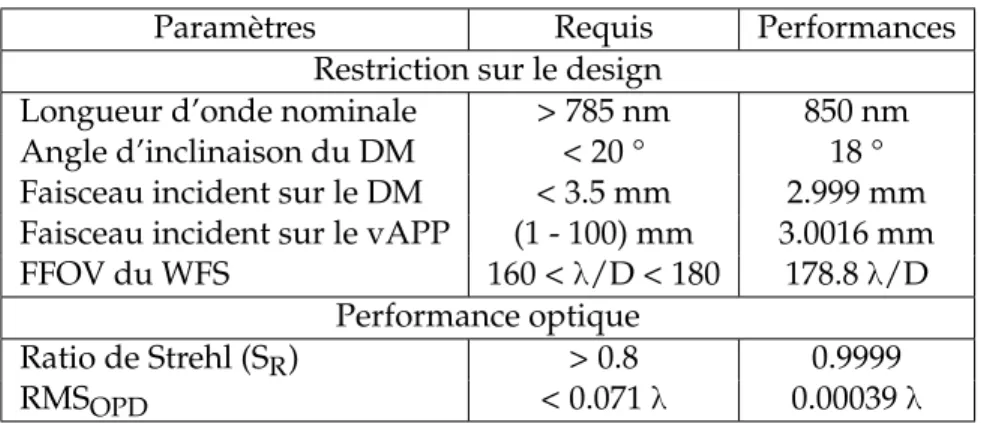
2.1 Résumé des principaux requis pour la conception du sous-système d’optique
adaptative . . . 19
2.2 Principales spécifications pour le miroir déformable d’Iris AO PTT111 . . . . 20
2.3 Spécifications sur les performances de la caméra HNÜ512 et la dimension de
son senseur. . . 21
2.4 Comparaison entre les requis du système optique et les performances obte-nues. Les simulations ont été réalisées à partir du logiciel Zemax pour les
conditions environnementales prévues pendant le vol (-30 °C, 0.005 atm). . . 24
2.5 Coefficient d’expension thermique des différents matériaux utilisés . . . 26
2.6 Comparaison des performances lorsque le système optimisé est utilisé dans des conditions de température et de pression ambiantes. Le coefficient de Zer-nike du défocus qui est calculé par le logiciel Zemax correspond à une valeur
normalisée de cercle unitaire. . . 28
2.7 Choix des dimensions pour le masque de phase et de la marge d’erreur
d’ali-gnement . . . 29
2.8 Position relative des principaux éléments du champ de vue qui sont représen-tés à la figure 2.11. Une incertitude de±0.5 λ/D est associé la lecture de ces
mesures. . . 32
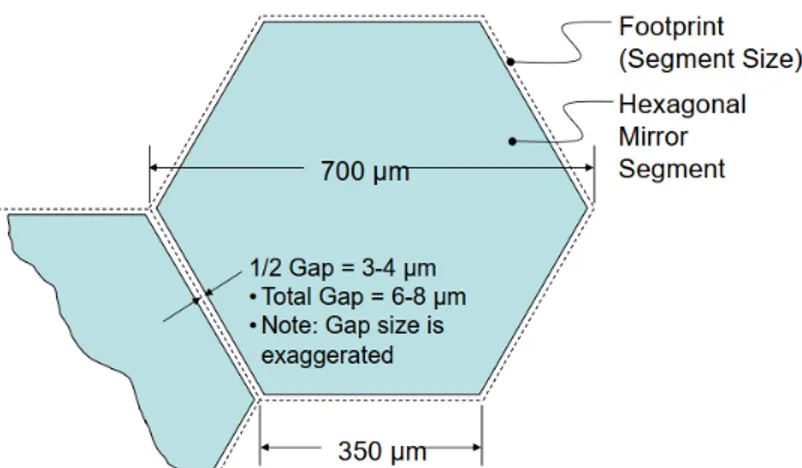
2.9 Ratio de Strehl et intensité relative des premiers pics de diffraction (m =±1) obtenu selon les propriétés géométriques de la surface segmentée du miroir
déformable PTT111 d’Iris AO . . . 35
2.10 Résumé de l’analyse des performances optiques pour le bras de calibration NIR. Les résultats sont présentés pour les conditions de la mission, les condi-tions ambiantes et dans le cas du pire scénario de l’analyse des tolérances par
Monté Carlo. . . 40
2.11 Propriétés de l’étoile cible et des filtres passe-bande utilisés pour le calcul du budget de photon. La quantité du flux à l’entrée du système est calculée en utilisant les données d’un recensement sur les propriétés photométriques
d’étoiles [25]. . . 43
2.12 Résumé du calcul de budget de photon pour le flux incident sur le détecteur de la caméra EMCCD512. Le flux et les propriétés de transmission sont indiqués pour les différents environnements et sous-systèmes impliqués dans le chemin
3.1 Erreur résiduelle de surface (nm) pour le miroir PPT111 selon les conditions d’opération [26]. (a) Résultat de la surface optimisé pour les conditions de température et de pression ambiantes. (b) Impact sur les performances de sur-face lorsque la sursur-face optimale est soumis à une température de 160 K et une pression de 10–6 mbar. (c) Performances obtenues après avoir réoptimisé la
qualité de la surface dans les conditions environnementales en b). . . 47
3.2 Résumé du calcul de budget de photon pour le trajet optique de la source laser dans le sous-système d’optique adaptative. Des filtres de densité neutre ont été sélectionnés pour obtenir un flux équivalent aux conditions d’illumination
attendue pour une étoile cible avec l’option de filtre étroit. . . 63
4.1 Résultats de l’analyse d’alignement entre le DM et le vAPP et comparaison
avec les valeurs théoriques attendues . . . 74
5.1 Comparaison des performances finales du sous-système d’imagerie haut contraste avec les requis de design ainsi que les résultats de simulations théoriques. Ces résultats ont été obtenus lors de la correction des erreurs résiduelles du
Liste des figures
1.1 Schéma du coronographe de Lyot qui combine l’utilisation d’un masque
d’oc-cultation au plan focal avec un stop de Lyot au plan pupille [2]. . . 3
1.2 Schéma d’un coronographe avec masque de phase [2] . . . 4
1.3 Schéma d’un télescope utilisant un masque d’occultation externe [5] . . . 5
1.4 Schéma d’une zone de contraste avec une couverture angulaire de 180 °. Les lignes hachurées montrent la distance relative entre le centre du signal de
l’étoile et le début de la zone de contraste (IWA). . . 6
1.5 Schéma d’un système d’optique adaptative et de sa boucle de contrôle (Cré-dit : Lawrence Livermore National Laboratory et NSF Center for Adaptive
Optics) . . . 7
1.6 Exemple d’un plan focal résultant pour un profil de masque de phase. (a) Pro-fil de variation de phase qui est inscrite sur la composante placée au plan pupille. (b) Le profil de phase du masque permet de déplacer spatialement différents éléments dans le champ de vue de la caméra. La zone encerclée en rouge comprend l’image de l’étoile avec une de zone de contraste avec une couverture de 180 °. La détection d’une exoplanète serait représentée par l’ap-parition d’un point dans la zone de contraste. Les éléments encerclés en jaune présentent des termes qui sont utilisés pour mesure les aberrations dans le
système. (Crédit : David Doelman) . . . 9
1.7 Principe d’holographie sur lequel repose la conception du masque de phase. Le patron de phase est optimisé pour permettre de créer des copies hologra-phiques respectivement pour chacun des modes d’aberration. (a) Présentation des deux fonctions d’onde dans le plan pupille qui permet de décrit l’expres-sion mathématique du profil de phase. (b) Représentation des copies hologra-phiques résultantes au plan focal lorsqu’un faisceau traverse la composante
de phase. [7] . . . 11
1.8 Exemple des pentes de calibration obtenue pour chacun de modes de Zer-nike lorsqu’un seul mode est appliqué (Z3). La ligne en rouge indique le profil de réponse linéaire estimé à partir de la courbe noire que représente la dif-férence d’intensité mesurée pour le mode concerné (a3). La coïncidence entre
la pente linéaire et la courbe expérimentale délimite l’amplitude d’erreur que la technique peut corriger. Les courbes en gris correspondent à la différence d’intensité mesurée pour les autres modes (6=a3). Dans le cas d’une base
par-faitement orthogonale, il est attendu qu’il n’y a pas de variation observée pour
ces modes. (Crédit : Chris de Jonge) . . . 12
1.9 Technique d’inscription directe des cristaux liquides par modulation d’un
2.1 Diagramme fonctionnel du trajet optique à travers les trois sous-systèmes d’HiCIBaS. La lumière de l’étoile est d’abord captée par le télescope du sys-tème de guidage (bleu), puis est dirigée vers le syssys-tème du LOWFS (vert) et le système d’optique adaptative pour l’imagerie haut contraste (rouge). Le trajet optique de la lumière est représenté par des lignes pleines et les boucles de
contrôle par les lignes pointillées. . . 17
2.2 Design optique simplifié du système HiCIBas où les faisceaux traversent le té-lescope et l’optique du Front-End. Deux dichroïques sont utilisés pour diriger
la lumière vers les trois sous-systèmes. . . 18
2.3 Présentation du miroir déformable PTT111. La surface segmentée du miroir
est disposée derrière une fenêtre de protection dans un boîtier scellé. . . 21
2.4 Présentation de la version commerciale de la caméra HNÜ512. Le prototype utilisé pour le sous-système d’imagerie haut contraste correspond à une HNÜ512 commerciale qui a été modifiée pour inclure un contrôleur spatial. Ce proto-type devrait conserver les mêmes spécifications que la caméra initiale (tableau
2.3) . . . 22
2.5 Design optique du système d’imagerie haut contraste présentant les princi-paux éléments de la boucle de contrôle. Les faisceaux d’entrées correspondent au plan pupille collimaté à la sortie du Front-End d’HiCIBaS. Une option de source de calibration permet également d’introduire un faisceau collimaté
dans le sous-système. . . 23
2.6 Représentation du faisceau incident (3 mm) par rapport au diamètre
maxi-mum permis de 3.5 mm. . . 23
2.7 Variation du ratio de Strehl lorsque le design optimisé est soumis à différentes conditions de température et de pression. Les performances sont présentées selon différentes courbes isothermes de pression. Les conditions résultantes
pour le vol et pour les conditions de test en laboratoire ont été mises en évidence. 27
2.8 Modélisation réalisée pour optimiser le profil de phase du coronographe. (a) Les simulations sont réalisées en implémentant le plan pupille obtenu à partir du design Zemax. (b) Les dimensions du patron de phase sont définies par la marge d’erreur d’alignement. Un réseau de diffraction à haute fréquence spatiale permet de diffracter les faisceaux qui se trouvent à l’extérieur du plan
pupille. (Crédit : David Doelman). . . 29
2.9 Caractéristiques associées aux 11 prototypes de masque de phase fabriqués. Les designs varient selon les stratégies d’algorithme de correction, le contraste optimisé ainsi que le nombre d’hologrammes et leur disposition dans le champ de vue. Tous les prototypes contenant des hologrammes permettent d’ap-pliquer la technique cMWFS. Les abréviations PD ("Phase Diversity") et F&F ("Fast & Furious") sont d’autres stratégies de correction auxquelles la technique
cMWFS pourrait être comparée. (Crédit : David Doelman) . . . 30
2.10 Simulation du plan focal pour les 11 prototypes de masque de phase. Le champ de vue est représenté en unité de (λ/D) et le contraste est indiqué selon une
2.11 Simulation du plan focal pour le prototype #5. Le champ de vue est exprimé en (λ/D) et le contraste est indiqué par une échelle logarithmique. Les prin-cipaux éléments du champ de vue sont identifiés en fonction de leur position angulaire relative. La PFS de science (1), le mode holographique du défocus (3) et l’hologramme le plus éloigné (4) sont positionnés relativement par rap-port au centre de l’image. Les limites de la zone de contraste (2) sont définies
en fonction de la position de la PSF de science. (Crédit : David Doelman) . . . 32
2.12 Patron de diffraction théorique obtenu selon différent géométrie de pupille
d’entrée d’un système optique [20; 21] . . . 33
2.13 Patron de diffraction théorique créer par les espaces entre les segments hexa-gonaux du miroir PTT111. (a) Les axes X et Y correspondre aux deux axes de symétrie selon lesquels les espaces sont disposés périodiquement. Ces axes sont repérés sur la surface selon un angle de révolution de π/6. (b) Patron d’interférence causé dans le plan image. Les pics sur l’axe φ1et φ2sont causés
respectivement la distribution d’espace suivant les axes X et Y. . . 34
2.14 Dimensions pour chacun des segments du DM PTT111 selon les fiches
tech-niques fournies par d’Iris AO. . . 35
2.15 Simulation du patron de diffraction causé par la surface segmentée du mi-roir déformable PTT111. La forme hexagonale des segments présente un profil d’intensité plus marqué suivant la forme d’une étoile, tandis que les espaces entre les segments occasionnent l’apparition d’un parton périodique de pics
d’interférence. . . 36
2.16 Comparaison des résultats de spot diagrammes au plan focal en fonction des conditions environnementales. Le disque d’Airy est représenté par un cercle noir et les faisceaux verts, bleus et rouges sont associés aux longueurs d’onde
830 nm, 850 nm et 870 nm. Les dimensions de la grille sont en microns. . . 38
2.17 Trajet optique de la source de calibration NIR pour le sous-système d’optique adaptative. Deux filtres dichroïques sont utilisés pour séparer la lumière des sources de calibration utilisée pour chacun des sous-systèmes. Le filtre pré-senté en rouge correspond au filtre dichroïque qui est utilisé dans le système
HiCIBaS pour subdiviser la lumière de l’étoile à l’entrée des deux sous-systèmes. 39
2.18 Trajet optique de la source de calibration VIS pour le sous-système du LOWFS. Les faisceaux sont d’abord réfléchis par le premier dichroïque, puis transmis
par le second directement dans le sous-système. . . 39
2.19 Comparaison de l’effet de dispersion chromatique simulé dans le plan focal de la caméra pour deux options de filtres passe-bandes (a) Le filtre #1 corres-pond à l’option de filtre passe-bande étroit où l’effet de la dispersion est négli-geable. (b) L’option de filtre plus large (#2) montre que la dispersion chroma-tique vient étaler les copies holographiques dans le champ de vue, mais qu’il
ne semble pas y avoir d’interférence intermodale. (Crédit : Chris de Jonge) . . 41
2.20 Comparaison des performances de contrastes attendus avec la lumière de l’étoile selon les deux options de filtres passe-bandes et pour la source de calibration. Les valeurs de contraste présentées correspondent aux valeurs moyennées en fonction de la position radiale dans la zone de haut contraste.
3.1 Vue en coupe présentant les principales composantes du télescope Célestron C-14 Schmidt-Cassegrain [28]. L’orientation entre les deux miroirs est ajustée en utilisant trois vis d’alignement. La position du miroir primaire selon l’axe
optique est réglée à partir d’une vis d’ajustement de focus. . . 49
3.2 Présentation du montage réalisé à l’intérieur de la chambre environnementale. Le télescope est soutenu par une monture motorisée de Célestron et un Hotech
est utilisé pour générer trois faisceaux parfaitement parallèles dans l’instrument. 49
3.3 Schéma du principe de fonctionnement du shear plate de Thorlabs, Inc. [29]. La double réflexion produite par la lame parallèle permet de créer des franges
d’interférence pour évaluer l’état de collimation du faisceau. . . 50
3.4 Résultats des simulations Zemax montrant la variation de la distance focale à la sortie du télescope en fonction de la température et pour des conditions de
pression ambiantes . . . 51
3.5 Nombre de tours de révolution de la vis de focus associé à la position optimale du miroir primaire en fonction de la température. Les tours on été compté à partir de la position infinie de la vis avec une précision de lecture de ± 0.5 mm. Les conditions de collimation optimales ont été évaluées avec un shear
plate. . . 52
3.6 Test réalisé avec le matériau d’impression ApolloX à l’intérieur d’une enceinte de cloche à vide. Une lentille a été placée à proximité d’une monture imprimée
en ApolloX pour évaluer le risque de dézagage. . . 52
3.7 Présentation du montage réalisé dans une chambre environnementale pour le tester des composantes dans des conditions de basse température (-30 °C). (a) Les sources de calibration, le miroir déformable et le Labjack ont été in-tégrés sur un banc optique à l’intérieur de la chambre. (b) Un voltmètre, un puissance-mètre et un analyseur spectral permettent de caractérise le signal sortant des fibres optiques et de mesurer les commandes de tension reçues
par le contrôleur des diodes. . . 53
3.8 Comparaison des performances de puissance laser à 20 °C et -30 °C selon la
consigne d’alimentation envoyé au Labjack . . . 54
3.9 variation de la longueur d’onde nominale de la source laser NIR en fonction de la température. Les mesures ont été prises à des intervalles de 5 °C avec
l’analyseur Spectrawiz. . . 54
3.10 Comparaison des tensions envoyées au contrôleur de la diode en fonction de
la commande Labjack à différentes températures d’opération (20 °C, -30 °C). . 55
3.11 Banc de test intégrant le vAPP, DM, la source de calibration NIR et une source blanche. Les flèches bleues et rouges indiquent le trajet optique pour la source blanche et la source de calibration. Un miroir de repli est utilisé pour
inter-changer la source qui est propagée dans le système optique. . . 56
3.12 Étape d’optimisation pour améliorer la qualité de surface initiale du miroir déformable. (a) PSF obtenue avec les erreurs d’alignement entre les segments lorsque le DM est au repos (sans alimentation). (b) PSF résultante lorsqu’une commande de piston, tip, tilt nulle est envoyée à chacun des segments (0 µm, 0 mrad, 0 mrad) pour optimiser leur alignement. (c) La correction avec une commande globale (0.0 µm, -0.1 mrad, 0.1 mrad) permet de compenser l’erreur causée par la gravité et ainsi réduire l’intensité des pics secondaires du patron
3.13 Plans focaux imagés avec la source de calibration pour différents prototypes de masque de phase. Ces images ont servi à valider l’intégrité de l’inscription
des cristaux liquides des patrons de phase. . . 58
3.14 Analyse de la dispersion chromatique causée par la source de calibration et les deux options de filtres avec le prototype #5 de masque de phase. Un décen-trage est observé dans le champ de vue entre le laser (a) et la source blanche (b) et (c) en raison de la différente d’alignement des deux sources dans le système
optique.. . . 59
3.15 Présentation du nouveau bras de calibration intégré sur le banc optique d’Hi-CIBaS pour éliminer la présence de l’image fantôme. Deux miroirs d’aligne-ment ont été ajoutés au design optique originale et le dichroïque a été
rem-placé par un diviseur de faisceau. . . 61
4.1 Présentation du montage expérimental pour l’alignement du le télescope avec la cible d’alignement du Hotech. (a) L’alignement du miroir primaire est réa-lisé en envoyant un faisceau en forme de croix dans le télescope. (b) La cible d’alignement comprend un faisceau laser central pour l’alignement du mi-roir primaire et trois faisceaux laser en périphérie qui permettent d’ajustement
l’orientation du miroir secondaire. . . 66
4.2 Monture utilisée pour injecter le faisceau à l’intérieur du télescope d’aligne-ment. Trois stages linéaires et une monture avec un contrôle tip-tilt permettent
d’aligner la source fibrée selon 5 degrés de liberté. . . 68
4.3 Exemple de la procédure d’alignement entre les deux télescopes lors de l’in-tégration sur la gondole. Les deux instruments sont placés à proximité pour
facilité la séquence d’alignement. . . 69
4.4 Procédure d’alignement des deux obscurations des télescope. (a) Une caméra est installé à la sortie du télescope pour aider à aligner avec précision les pu-pilles des deux télescopes. (b) Exemple d’un plan pupille présentant un désa-lignement entre l’obscuration secondaire des deux télescope. Cette image a été
prise au plan pupille après le DM. . . 69
4.5 Présentation des principales composantes utilisée pour l’alignement d’un fais-ceau vertical dans le périscope. Le moteur RM3 (jaune) permet d’ajuster l’orien-tation du miroir de 3" (rouge) situé juste derrière le télescope. Le périscope représente le tube en coude qui contient des lentilles et un miroir de replie (bleu) qui permet aux faisceaux d’atteindre à la bonne de hauteur de propa-gation rapport aux éléments du banc optique. Les lentilles se trouvent dans un tube indépendant qui est visé à l’entrée du périscope. Un miroir plan peut être accroché au support du coude (vert) pour réenvoyer les faisceaux réfléchis
vers le télescope. . . 70
4.6 Procédure d’alignement entre les deux planchers de la gondole. Une cible d’alignement est placée sur le tube de lentilles (rouge) à l’entrée du périscope (bleu). Le second plancher (orange) est déplacé manuellement pour atteindre
4.7 Présentation des principales composantes utilisées pour l’alignement du fais-ceau sur le banc optique. La procédure a été réalisée en ajustant l’alignement de miroirs de replie(rouges), du miroir déformable (bleu) et la position de la monture du coronographe (orange). L’alignement du miroir dans le coude du télescope a été vérifié en plaçant une cible d’alignement (mauve) à deux
en-droits dans le trajet optique. . . 72
4.8 Analyse de l’erreur d’alignement et mesure des dimensions du masque de phase pour la source de calibration. (a) Image originale de la superposition de DM et du vAPP au plan pupille. (b) Mesure de la position et de la dimension
des éléments dans le champ de vue de la caméra.. . . 73
4.9 Analyse de l’erreur d’alignement et mesure des dimensions du faisceau inci-dent pour la source blanche. (a) Image originale de la superposition de DM et du vAPP au plan pupille. (b) Mesure de la position et de la dimension des
éléments dans le champ de vue de la caméra. . . 74
4.10 Photo prise lors du test de la gondole supendue . . . 76
5.1 Images résultantes sur la caméra HNÜ512 en utilisant la source blanche qui simule la propagation des faisceaux d’une étoile artificielle à travers tout le système optique d’HICIBaS. Le champ de vue est présenté en unité de pixel du détecteur. (a) Image originale obtenue sur la caméra. (b) Amélioration de la qualité d’image obtenue en appliquant une correction de 2.5 radians avec le
miroir déformable. (Crédit : Chris de Jonge) . . . 79
5.2 Champ de vue obtenue sur la caméra EMCCD512 lors de la démonstration en boucle fermée de l’algorithme de contrôle cMWFS avec le système de calibra-tion. Le miroir déformable est utilisé pour corriger les erreurs statiques dans
le sous-système d’imagerie haut contraste. (Crédit : Chris de Jonge) . . . 80
5.3 Convergence de l’algorithme de contrôle cMWFS lors de la correction en boucle fermée des erreurs de front d’onde résiduelle dans le sous-système d’optique adaptative. Les erreurs exprimées en radian correspondent aux valeurs
mesu-rées par les 12 modes de copies holographiques. (Crédit : Chris de Jonge) . . 81
5.4 Comparaison entre les performances de contraste mesuré et théorique selon le profil radial de la zone de haut contraste. Le contraste exprimé selon l’échelle logarithmique a été mesuré expérimentalement avec et sans boucle de contrôle.
(Crédit : Chris de Jonge) . . . 82
5.5 Comparaison entre une image prise pendant la mission avec la source de cali-bration et une image en laboratoire où le miroir déformable n’est pas alimenté. (a) Image obtenue pendant le vol sur laquelle un post-traitement du bruit a été réalisé. (b) Image obtenue en laboratoire lorsque les actuateurs du miroir
dé-formable sont au repos. (Crédit : Chris de Jonge) . . . 84
5.6 Comparaison des performances du laser avant et après le vol. (a) Puissance laser mesuré en fonction de la consigne d’alimentation du Labjack. (b) Com-paraison des tensions envoyées au contrôleur de la diode en fonction de la
5.7 Segments défectueux du miroir déformable PTT117 observé à la suite du vol dans la stratosphère. (a) Image de la surface du miroir déformable à travers sa fenêtre de protection où il est possible de voir la réflexion distincte d’un segment par rapport au reste de la surface segmenté. (b) Image au plan pupille conjugué montrant que les faisceaux réfléchis par le segment défectueux ont
été exclus en raison de la différence de trajet optique. . . 86
5.8 Comparaison des performances de stroke et du tilt maximum pour chacun des segments du DM PTT111 avant et après la mission stratosphérique. Ces résultats correspond aux valeurs mesurées directement par le contrôleur du DM. (a) Mesure du stroke absolu lorsque tous les autres segments sont forcés à garder la configuration sur d’une surface plane idéale (0 µm, 0 mrad, 0 mrad). (b) Mesure du Tilt minimum et maximum pour chaque segment en gardant la
consigne de surface plane pour les autres segments. . . 87
5.9 Réplique du système optique d’imagerie haut contraste qui a été monté dans les locaux du SRON. Une cage de haute précision permet de mettre au besoin un miroir plan pour sélectionner la source à l’entrée du système. Un exemple de trajet optique pour la source blanche et la source de calibration sont indi-qués respectivement par les flèches blanches et rouges sur la figure. Un miroir inclinable permet de choisir entre la caméra au plan focal et la caméra au plan
pupille conjugué (flèches bleues). . . 94
A.1 Mesure de la température de la structure du télescope en fonction des pa-liers réalisés dans la chambre environnementale. La courbe en mauve indique la variation de température mesurée dans la chambre tandis que les autres courbes représentent les lectures de quatre thermocouples fixés sur l’extérieur
du tube du télescope. . . 96
"Man must rise above Earth to the top of the atmosphere and beyond, for only then will he fully understand the world in which he lives" – Socrates (469-399 BC)
Remerciements
J’aimerais d’abord remercier le Professeur Simon Thibault pour m’avoir permis de prendre part à la mission exceptionnelle du projet HiCIBaS. Je le remercie pour sa confiance, ses encouragements et son attitude bienveillante tout au long de la réalisation de mon projet de maîtrise. Ce fut un plaisir de faire partie de son équipe de recherche.
Ce projet de recherche à profil industriel n’aurait pas été possible sans compter le partenariat avec la compagnie ABB Bomem. Étant le partenaire industriel de ce projet de maîtrise, je les remercie pour leur implication et leur contribution indispensable. J’aimerais également mentionner un merci spécial à Frédéric Grandmont et Raphaël Desbiens pour qui j’ai eu la chance de travailler pendant mes stages industriels et qui m’ont motivé à entreprendre le défi des études graduées.
Je voudrais également mentionner ma reconnaissance aux membres du Laboratoire de re-cherche en ingénierie optique (LRIO) qui ont offert leur aide et leur expertise à maintes reprises. Merci d’abord à Denis Brousseau pour ses conseils avec le logiciel de conception Zemax et à Hugues Auger pour son aide indispensable au laboratoire. Merci aussi à Anne-Sophie Poulin-Girard d’avoir toujours consacré du temps précieux à mes questionnements et de s’être occupée des accommodations lors du séjour à Timmins pour la campagne de lancement du ballon stratosphérique. Je tiens également à souligner le travail des différents employés du Centre d’optique, Photonique et Laser qui offrent un support essentiel pour les étudiants.
Le projet HiCIBaS a été un projet d’envergure pendant lequel j’ai eu la chance de faire partie d’une équipe de travail formidable composée de quatre autres étudiants à la maîtrise. Merci à Guillaume, Cédric, Deven et Olivier pour leur dévouement tout au long du projet et pour tous les souvenirs mémorables.
Je tiens également à souligner le travail réalisé par nos collaborateurs aux Pays-Bas avec qui j’ai eu l’opportunité de travailler. Je remercie David Doelman et le Professeur Frans Snik pour avoir optimisé et prêté un coronographe. Du SRON ("Netherlands Institute for Space Research"), je veux également mentionner le bon travail et l’implication de Chris de Jonge et Marcel Dijkstra pour le développement de l’algorithme de contrôle.
J’aimerais également remercier les nombreux collaborateurs impliqués dans le projet HiCI-BaS et plus particulièrement les compagnies Nüvü et Iris AO qui ont prêté les instruments dispendieux pour la réalisation du prototype du système optique d’imagerie haut contraste. Merci à mon amie Noémie qui m’a toujours poussé au dépassement de soi. Ce fut un plaisir de vivre avec toi l’aventure des études graduées et les joies du sport au quotidien.
Finalement, un grand merci à mes parents et ma famille d’avoir toujours supporté et montré beaucoup d’intérêt dans tous les projets que j’ai jusqu’à présent entrepris. Merci à mes sœurs Andrée-Anne et Caroline pour avoir toujours été des sources d’inspiration.
Introduction
Depuis les premières détections d’exoplanètes, beaucoup d’efforts scientifiques ont été dé-ployés pour perfectionner les instruments astronomiques qui permettraient de caractériser ces objets avec plus de précision. Pour effectuer leur caractérisation, il est nécessaire d’avoir recours à des techniques dites d’imagerie directes. Ces techniques présentent cependant de nombreux défis technologiques en raison de la différente de contraste entre l’étoile et l’exo-planète sans compter leur proximité dans le champ de vue. Dans le cas des exol’exo-planètes qui orbitent dans la zone habitable, le contraste entre la lumière émise par l’étoile et celle réflé-chie par l’exoplanète est de l’ordre de 10–10.
Le principe de l’imagerie directe à haut contraste repose sur l’utilisation combinée d’un co-ronographe et d’un système d’optique adaptative. Le coco-ronographe est un instrument qui permet d’occulter la lumière provenant de l’étoile, tandis que l’optique adaptative réalise une correction en temps réels du front d’onde pour optimiser la qualité de l’image. Dans cette optique, plusieurs projets de télescopes spatiaux tels que JWST ("James Webb Spatial Telescope") et WFIRST ("Wide field Infrared Survey Telescope") ont comme motivation scienti-fique d’imager directement des exoplanètes à partir de l’espace pour s’affranchir des aber-rations de front d’onde causées par les turbulences atmosphériques. L’observation à partir de l’espace permet d’améliorer davantage la qualité d’image, toutefois cela implique que les instruments soit aptes à fonctionner dans de telles conditions extrêmes.
Dans ce projet de maîtrise, un système optique d’imagerie haut contraste a été développé pour valider la maturité technologique d’un coronographe, d’un miroir déformable ainsi que d’une caméra avec contrôleur spatial qui ont le potentiel d’être utilisés pour des mis-sions spatiales. L’instrument permet également de faire une démonstration d’un algorithme d’optique adaptative qui a la particularité d’utiliser un coronographe pour détecter la pré-sence des aberrations.
Le contenu de ce mémoire est divisé en 5 chapitres. Le chapitre 1 vient introduire les no-tions théoriques qui permettent d’expliquer les particularités de la technique d’imagerie haut contraste. Un survol de principaux concepts de coronographe sera réalisé et les paramètres de performance de ces instruments seront expliqués. Le principe de fonctionnement d’un système d’optique adaptative sera également introduit et les principales composantes qui le
composent seront présentées. Le concept de coronographe choisi sera par la suite expliqué plus en détail.
Le chapitre 2 présente le design optique et les différentes simulations qui permettent de décrivent les performances théoriques attendues de l’instrument. Ce chapitre réalisera la mise en contexte des objectifs du projet et définira les requis qui ont été considérés pour la conception du système. Les résultats d’analyses réalisés avec le logiciel de conception Zemax montreront comment les conditions environnementales et les tolérances mécaniques de fabrication ont été prises en compte pour optimiser les performances du système dans le contexte d’une mission stratosphérique. Les simulations des performances et limitations théoriques du coronographe seront ensuite explosées. Une analyse de budget de photon sera par la suite réalisée pour déterminer les conditions d’imagerie attendue pour le système. Le chapitre 3 montre les différents tests en laboratoire qui ont servi à caractériser et à valider le fonctionnement des différentes composantes du système. Leur fonctionnement dans des conditions extrêmes de la mission sera confirmé avec des tests en chambres environnemen-tales. L’utilisation d’un banc de test optique permettra de valider les fonctionnements des différentes composantes, puis le fonctionnement intégral du système sera vérifié lors d’une intégration sur le banc optique final du système HiCIBaS ("High Contrast Imaging Balloon System").
Le chapitre 4 décrit la stratégie d’alignement qui a permis d’intégrer le sous-système d’ima-gerie haut contraste et les différents autres sous-systèmes d’HiCIBaS à bord de la gondole pour le vol stratosphérique. Cette phase d’intégration, réalisée à la base de l’Agence spatiale canadienne (ASC) à Timmins, comprend plusieurs étapes d’alignement qui seront présentées en détail. Une fois l’intégration finale complétée, des tests viendrons par la suite analyser les performances d’alignement en fonction des requis demandés.
Finalement, le chapitre 5 présente les performances d’imagerie finales du système à bord de la gondole scientifique. Les images résultantes sur la caméra seront investiguées en utilisant la source de calibration du sous-système et la lumière propagée à travers tout le système HiCIBaS. Les résultats de la première démonstration de l’algorithme de contrôle seront en-suite présentés pour la source de calibration lorsque le système était au sol. Les différentes observations réalisées pendant la mission stratosphérique seront ensuite discutées et compa-rées avec les mesures de référence qui avaient été prises au sol. Pour terminer, des analyses d’après vol viendront mettre en évidence les conséquences du vol stratosphérique et des conditions d’atterrissage sur le fonctionnement des composantes.
Chapitre 1
Théorie
Ce chapitre introduit les notions théoriques permettant d’expliquer le fonctionnement du système optique d’imagerie direct à haut contraste développé dans le cadre de ce mémoire. Le concept de coronographie est d’abord présenté avec un survol des techniques existantes et une description des paramètres de performances. Le fonctionnement d’un système d’optique adaptative est ensuite abordé en présentant les différentes composantes requises ainsi que les limitations de la technique. Finalement, le concept de coronographe choisi est présenté plus en détail pour comprendre son fonctionnement et ces particularités.
1.1
Technique de coronographie
1.1.1 Coronographe de Lyot
Le coronographe de Lyot est le premier concept de coronographe qui a été inventé au début des années 1930 par Bernard de Lyot. Il utilise un masque opaque dans le plan focal afin de bloquer physiquement le lobe central de la lumière de l’étoile. Un stop est également placé dans le plan pupille, c’est-à-dire le plan où le faisceau est collimaté. Le stop de Lyot permet de réduire l’intensité associée aux anneaux de diffraction [1].
FIGURE1.1 – Schéma du coronographe de Lyot qui combine l’utilisation d’un masque d’oc-cultation au plan focal avec un stop de Lyot au plan pupille [2]
En utilisant un masque opaque de dimension appropriée, il est possible de venir bloquer les faisceaux de l’étoile tout en permettant de laisser passer les faisceaux réfléchis par l’exo-planète. Cependant, l’utilisation d’une composante dans le plan focal fait en sorte que la technique est très sensible aux erreurs d’alignement sur l’étoile.
1.1.2 Masque de phase
Une autre technique proposée est d’utiliser un masque de phase pour créer une zone de contraste à partir du principe d’interférence de la lumière. Le masque est disposé dans le plan pupille et induit une modulation de la phase au faisceau collimaté de l’étoile. Le patron de phase est choisi et optimisé pour faire interférer destructivement uniquement la lumière de l’étoile et ainsi créer une zone de contraste permettant d’observer le signal des exopla-nètes. En comparaison avec le coronographe de Lyot, l’utilisation d’une composante uni-quement dans le plan pupille a pour avantage de rendre la technique insensible aux erreurs d’alignement de tip/tilt.
FIGURE1.2 – Schéma d’un coronographe avec masque de phase [2]
1.1.3 Masque d’amplitude
Selon le même principe que le masque de phase, il est possible de créer une zone de contraste dans le plan focal de la caméra en manipulant le terme d’amplitude du faisceau. La compo-sante est également placée dans le plan pupille sauf que cette fois, seul le terme d’amplitude est modulé. L’apodisation de l’amplitude peut se faire de manière continue ou en utilisant un profil binaire [3].
1.1.4 Coronographe utilisant l’interférométrie
Ce type de conorographe divise physiquement le faisceau pour obtenir le phénomène d’in-terférence. L’introduction d’un déphasage de π dans l’un des bras de l’interféromètre permet d’obtenir des zones de contraste lorsque les deux faisceaux sont physiquement recombinés. Dans ce cas-ci, le terme de modulation de phase est beaucoup plus simple que celui qui doit être optimisé pour le coronographe de type masque de phase. Il existe une variété de coronographes qui utilisent ce principe comme, par exemple, le VCN (Visible Nulling
Interfe-rometer) qui réalise deux étapes de séparation et utile le résultat d’interférence produit par la combinaison de quatre faisceaux [3].
1.1.5 Masque d’occultation externe
Un nouveau concept étudié dans le contexte des télescopes spatiaux est d’utiliser un masque d’occultation externe se trouvant à une grande distance en avant du télescope. Ce concept permettrait de bloquer la lumière de l’étoile avant même que les faisceaux ne puissent at-teindre le télescope. L’utilisation d’un coronographe externe a comme avantage de simplifier les requis du télescope et du design optique, mais demande de conservé un très bon aligne-ment entre le véhicule spatial du télescope et celui du masque d’occultation. Le concept est présentement étudié comme technique de coronographie alternative dans le cas de la mis-sion spatiale HabEx [4].
FIGURE1.3 – Schéma d’un télescope utilisant un masque d’occultation externe [5]
1.2
Métriques de performance
La section précédente a permis d’introduire les différents concepts théoriques qui permettent d’obtenir une zone de contraste pour l’observation d’exoplanète. À l’exception du masque d’occultation externe, une grande variété de design ont été proposés pour chacune de ces familles de coronographes. Chaque technique présente différents avantages et pour cette raison il n’est pas rare de voir la combination de plusieurs de ses stratégies dans un seul ins-trument. Le coronographe de Lyot modifié en est un bon exemple étant donné qu’il combine le coronographe de Lyot traditionnel avec soit un masque de phase ou d’amplitude pour améliorer les performances d’occultation.
Les requis de performance des coronographes vont varier grandement en fonction du type d’exoplanètes que l’on tente d’imager et également selon la plage de longueur d’onde uti-lisée. Par exemple, dans le visible une exoplanète qui se situe dans la zone habitable repré-sente un plus grand défi d’imagerie directe en comparaison avec une planète plus éloignée
comme Jupiter. Trois paramètres sont utilisés pour décrire requis de performances de la zone de contraste [3].
1.2.1 Couverture angulaire
La couverture angulaire de la zone de contraste décrit l’aire du champ de vue couvert par la zone de contraste où il est possible de détecter des exoplanètes. Certaines techniques de coronographie optimisent seulement une section du champ de vue, tandis que d’autres per-mettent d’observer avec une couverture de 360° autour de l’étoile.
1.2.2 Position radiale du début de la zone de contraste
Dans le champ de vue, la zone de contraste est décrite en termes de position radiale par rapport à la position de l’étoile. La zone est définie par un angle de début et de fin qui se nomment respectivement IWA ("Inner Working Angle") et OWA ("Outer Working Angle"). Ces angles sont habituellement exprimés en unité de [λ/D] qui correspond à la longueur d’onde mesurée sur le diamètre de l’ouverture dans le plan pupille. L’angle IWA est défini comme un requis de performance étant donné que beaucoup d’exoplanètes d’intérêts se situent à faible distance angulaire de leur étoile. Par conséquent, seules les exoplanètes qui ont une distance de séparation supérieure au IWA pourront être détectées.
FIGURE1.4 – Schéma d’une zone de contraste avec une couverture angulaire de 180 °. Les lignes hachurées montrent la distance relative entre le centre du signal de l’étoile et le début de la zone de contraste (IWA).
1.2.3 Niveau de contraste
Le contraste correspond à la différence d’intensité mesurée entre la lumière émise par l’étoile et la lumière qui est réfléchie à la surface de l’exoplanète. Cette valeur est exprimée en base 10. À titre d’exemple, pour parvenir à détecter une planète comme Jupiter le requis de contraste dans le visible se situe entre 10–8 et 10–9. Dans le cas des exoplanètes se situant dans la zone habitable, il est nécessaire d’atteindre un contraste de l’ordre de 10–10.
1.3
Système d’optique adaptative
L’optique adaptative permet d’effectuer des corrections en temps réel de la qualité du front d’onde et d’obtenir la qualité d’image requise pour l’utilisation d’un coronographe. La figure
1.5 présente le schéma traditionnel d’un système d’optique adaptative avec les différentes composantes requises. D’abord, les aberrations présentent dans le système sont détectées par un senseur de front d’onde, puis cette information est envoyée à un système de contrôle qui travaille en boucle fermée. L’erreur est interprétée par le système de contrôle et une commande de correction est ensuite envoyée à un miroir déformable (DM) qui modifie sa surface de manière à annuler les aberrations.
FIGURE1.5 – Schéma d’un système d’optique adaptative et de sa boucle de contrôle (Crédit : Lawrence Livermore National Laboratory et NSF Center for Adaptive Optics)
La déformation du miroir se fait par le biais d’actuateurs qui se trouvent dissimulés sous une surface continue ou segmentée. Parmi les principaux paramètres de performances qui sont considérés lors d’un choix d’un miroir déformable, on retrouve l’amplitude de correc-tion, la vitesse de correccorrec-tion, le nombre d’actuateurs, la dimension de la surface ainsi que l’alimentation électrique.
1.3.1 Présence d’erreurs quasi statiques
Les senseurs de front d’onde conventionnels doivent apporter des modifications au faisceau afin d’extraire l’information de front d’onde pour la correction. Pour cette raison, le sys-tème doit utiliser deux caméras ; une pour le senseur de front d’onde et l’autre pour obtenir l’image de science de l’étoile. Un élément optique est donc utilisé pour séparer la lumière
entre les deux caméras. La différence de trajet optique entre les deux détecteurs occasionne cependant l’apparition d’erreurs quasi-statiques dans le système qui ne peuvent pas être cor-rigées par le miroir déformable. Ces erreurs de type NCPA ("Non-common Path Aberrations") varient très lentement dans le temps et peuvent être interprétées à tort comme le signal émis par des exoplanètes.
Pour réduire ces erreurs, différents algorithmes de contrôle ont été développés dans le but d’ajouter une séquence de calibration pendant les mesures ou pour corriger en post-traitement ses aberrations. Plusieurs instruments comme SPHERE et GPI ont présenté jusqu’à présent des résultats prometteurs en faveur de cette stratégie [6]. Une autre solution envisagée est d’utiliser un senseur de front d’onde qui permet d’obtenir dans le plan focal de la caméra à la fois l’information de phase ainsi que l’image de l’étoile. Ce type de senseurs appelé FPWFS ("Focal Plane Wavefront Sensor") ont pour avantage d’éliminer le besoin d’utiliser une deuxième caméra. Étant donné que le trajet optique n’est plus séparé, cette configuration permet d’obtenir un système qui minimise la présence d’erreurs NCPA.
1.4
Introduction au coronographe de type vAPP
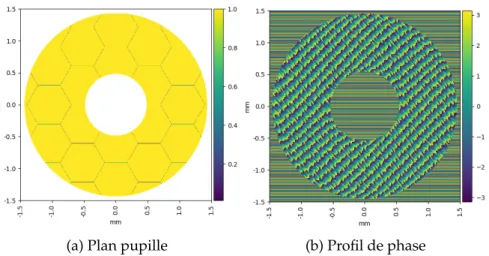
Le coronographe choisi dans le cadre de ce projet de maîtrise permet d’exploiter le concept et les avantages d’un senseur FPWFS. Le vAPP (« vector Apodizing Phase Plate) est un masque de phase qui offre la possibilité de contenir toutes les informations nécessaires dans le champ de vue d’une seule caméra. La figure1.6 présente un exemple de profil de phase du vAPP dans le plan pupille ainsi que l’image résultante dans le plan focal de la caméra. La forme du masque de phase dans le plan pupille est choisie pour correspondre au profil du faisceau collimaté qui se propage dans le système. La figure1.6(a) montre l’exemple dans le cas d’un télescope où le faisceau a habituellement la forme d’un beigne en raison de l’obscuration causé par le miroir secondaire.
Le vAPP est une composante qui permet d’apporter plusieurs modifications de phase simul-tanément. Trois profils de phase sont optimisés respectivement pour produire une zone de contraste, diviser les deux polarisations circulaires et créer des copies holographiques pour la détection des aberrations. Ces trois opérations de phase dans le plan pupille peuvent être convoluées ensemble pour obtenir un seul patron de phase qui inclut tous ces effets. Cela a pour avantage de simplifier le design du système étant donné qu’une seule composante doit être ajoutée dans le plan pupille entre le miroir déformable et la caméra.
Les deux termes encadrés en rouge dans la figure1.6(b) correspondent à l’image de l’étoile avec une zone de haut contraste respectivement pour les deux composantes de polarisation circulaire du faisceau. Étant donné que l’image résultante des deux polarisations est inver-sée, cette astuce permet d’obtenir deux zones de contraste complémentaire de 180° qui au final correspond à une couverture de 360° autour de l’étoile. Les encadrées en jaune
repré-(a) Plan pupille (b) Plan focal de la caméra
FIGURE 1.6 – Exemple d’un plan focal résultant pour un profil de masque de phase. (a) Profil de variation de phase qui est inscrite sur la composante placée au plan pupille. (b) Le profil de phase du masque permet de déplacer spatialement différents éléments dans le champ de vue de la caméra. La zone encerclée en rouge comprend l’image de l’étoile avec une de zone de contraste avec une couverture de 180 °. La détection d’une exoplanète serait représentée par l’apparition d’un point dans la zone de contraste. Les éléments encerclés en jaune présentent des termes qui sont utilisés pour mesure les aberrations dans le système. (Crédit : David Doelman)
sentent un exemple de termes qui sont utilisés pour mesurer les aberrations en utilisant la technique de cMWFS (« cornagraphic Modal Wavefront Sensing »).
1.4.1 Principe de fonctionnement du cMWFS
Le masque de phase utilise le principe de d’holographie pour parvenir à détecter la présence d’aberration dans le plan focal. La fonction de phase holographique permet de déplacer spa-tialement dans le champ de vue les différentes copies afin de ne pas apporter de modification à l’image de science de l’étoile. Chaque holographe correspond à des copies conformes de l’image de l’étoile auquel a été ajouté un biais de phase qui est associé à une aberration en particulier.
La technique utilise une décomposition modale de la phase pour détecter de manière ortho-gonale les différentes aberrations. Suivant le développement mathématique de l’optique de Fourier, le faisceau collimaté dans le plan pupille est représenté par la fonction d’onde :
Φ(x, y) = A(x, y)eiφ(x,y) (1.1)
de coordonné (x,y). Il est possible de représenter le terme de phase comme une somme de termes orthogonaux, soit φ(x, y) =∑kakMk(x, y) , où chacune des géométries de phase cor-respond à un mode Mk(x, y) avec une amplitude ak. Suivant cette définition, il est possible de décrire chacune des aberrations par un terme de phase Mk(x, y).
Dans le cas présent, les erreurs de front d’onde ont été représentées en utilisant les poly-nômes de Zernike qui constitue une base orthogonale de polypoly-nômes pour un cercle unitaire. Bien qu’il existe plusieurs autres solutions de base orthogonale possibles, les polynômes de Zernike sont couramment utilisés en optique adaptative. Cela est principalement dû au fait que leur expression correspond directement à la forme des aberrations géométriques ren-contrée en optique comme le tilt, tilt, défocus, coma, etc.
1.4.2 Génération des hologrammes
Comme il a été décrit dans la section suivante, le patron de phase holographique H(x,y) réalise deux opérations dans le plan pupille ; il ajoute un terme par défaut de phase et il déplace spatialement l’image résultante dans le champ de vue de la caméra. Ces opérations sont réalisées respectivement par les fonctions d’onde Rk(x, y) et Ok(x, y) sont illustrées à la figure1.7(a). La fonction Rk(x,y) ajoute dans le système une amplitude bkconnue du mode, alors que Ok(x, y) modifie la fréquence spatiale. Pour chaque mode d’aberration Mk(x, y), la phase holographique Hk(x, y) utilisée correspond donc au résultat de l’interférence de ces deux fonctions :
Hk(x, y) =| Ok(x, y) + Rk(x, y) |2 (1.2) Lorsqu’un faisceau Ψ(x, y) interagit avec la phase holographique dans le plan pupille, le profil d’intensité résultant dans le plan focal est donné par l’expression :
I =| F[H(x, y)Φ(x, y)] |2 (1.3)
où F correspond à l’opération de la transformée de Fourier. À partir de la figure 1.7(b), il est possible de voir que cette opération amène à la formation de trois points focaux(I+, I0,I–) dans le champ de vue.
Une partie de l’intensité de Ik+et Ik–provient respectivement de la contribution des termes de phase (ak+ bk)Mk(x, y) et (ak-bk)Mk(x, y) où akest l’amplitude que l’on cherche à mesu-rer. Étant donné que les deux copies on le même terme de phase bk, mais de signe inverse, une différente d’intensité entre Ik+et Ik–sera observé pour un ak non nul. En d’autres mots, l’amplitude du coefficient ak peut être obtenue directement en calculant la différence d’in-tensité normalisée entre les deux copies holographiques d’un mode :
(a) Phase holographique H(x,y)
(b) Hologrammes résultant dans le plan focal
FIGURE1.7 – Principe d’holographie sur lequel repose la conception du masque de phase. Le patron de phase est optimisé pour permettre de créer des copies holographiques respective-ment pour chacun des modes d’aberration. (a) Présentation des deux fonctions d’onde dans le plan pupille qui permet de décrit l’expression mathématique du profil de phase. (b) Re-présentation des copies holographiques résultantes au plan focal lorsqu’un faisceau traverse la composante de phase. [7]
Ik = Ik+– Ik–
Ik++ Ik– (1.4)
S’il s’agit d’une autre aberration Mj6=k, l’impact sur l’intensité des pics Ik+et Ik– sera iden-tique. Par conséquent, le profil d’holographie final H(x,y) parvient à découpler spatialement les différentes aberrations dans le système et permet de les quantifier par une simple mesure d’intensité.
1.4.3 Commande de correction pour le miroir déformable
Avant de pouvoir envoyer des commandes de correction, il sera nécessaire dans un premier temps de calibrer la réponse d’intensité des hologrammes en fonction du miroir déformable. Cette étape demande de mesurer la variation de l’intensité des Iken fonction de l’amplitude
de la commande ak envoyée au miroir déformable. Cette analyse est répétée pour chacun des modes de Zernike et permet ainsi de construire une matrice d’interaction. Les termes de la matrice sont obtenus en estimant la pente de réponse linéaire pour chacun des modes. Une fois que ces termes ont bien été identifés, il est donc possible de réaliser une boucle de contrôle d’optique adaptative en effectuant un calcul de matrice inverse.
FIGURE1.8 – Exemple des pentes de calibration obtenue pour chacun de modes de Zernike lorsqu’un seul mode est appliqué (Z3). La ligne en rouge indique le profil de réponse linéaire estimé à partir de la courbe noire que représente la différence d’intensité mesurée pour le mode concerné (a3). La coïncidence entre la pente linéaire et la courbe expérimentale déli-mite l’amplitude d’erreur que la technique peut corriger. Les courbes en gris correspondent à la différence d’intensité mesurée pour les autres modes (6=a3). Dans le cas d’une base par-faitement orthogonale, il est attendu qu’il n’y a pas de variation observée pour ces modes. (Crédit : Chris de Jonge)
La figure 1.8présente un exemple où une pente est estimée à partir de la zone de réponse linéaire d’un mode. Les courbes sur l’origine montrent la propriété d’orthogonalité de la base étant donné que les autres modes ne sont pas sollicités par la commande.
1.4.4 Fabrication du vAPP
Le masque de phase est fabriqué en utilisation une technique d’inscription de cristaux li-quides par laser ultraviolet (UV) [8]. Le laser est d’abord modulé en intensité et polarisation afin d’inscrire l’orientation désirée sur un matériel photosensible. Ce matériel a la propriété de s’aligner respectivement en fonction de l’orientation de la polarisation linéaire du fais-ceau laser. La couche de cristaux liquides qui est subséquemment déposée va par la suite s’aligner directement avec le matériel photosensible. Cette procédure de fabrication permet de reproduire la complexité du design de phase du vAPP avec une résolution d’inscription de 1 micron.
FIGURE1.9 – Technique d’inscription directe des cristaux liquides par modulation d’un laser ultraviolet [9]
1.4.5 Compromis sur les performances
Il existe un compromis entre le nombre de modes utilisés pour la détection d’aberration et le pourcentage de lumière associé à l’image de science. Pour chacun des modes ajoutés, une fraction de la lumière incidente est modulée spatialement et redistribuée dans les copies holographiques. Par conséquent, le ratio de signal sur bruit (SNR) de l’image de science sera réduit. Toutefois, un nombre minimum d’hologrammes est nécessaire pour atteindre les performances souhaitées de correction du front d’onde. Ce compromis sera discuté plus en détail lors du choix du design du masque de phase présenté au chapitre 2. Un plus grand nombre d’hologrammes implique cependant d’utiliser une caméra avec un champ de vue suffisamment grand pour éviter l’interférence entre les copies. Selon les astronomes qui ont utilisé auparavant ce type de coronographe, l’utilisation d’une distance radiale d’au moins 5 λ/D serait recommandé entre chacun des termes pour respecter cette condition.
Ce chapitre a permis d’introduire les différentes notions théoriques en lien avec l’imagerie à haut contraste. Une revue des concepts de coronographes a servi a exposé les différentes stratégies qui permettent d’occulter la lumière d’une étoile. Les peformances de la zone de contraste ont été décrites de façon qualitative selon la définition de trois paramètres de per-formances. Les différentes composantes requises pour réaliser un système d’optique adapta-tive ont été présentées. Finalement, la section 1.4 a portée sur le coronographe de type vAPP qui sera utilisé dans le système optique présenté dans ce mémoire. Son principe de fonc-tionnement et ses particularités ont été introduits et permettront de mieux comprendre les enjeux de design qui seront abordés dans les chapitres suivants.
Chapitre 2
Design et tolérancement
Ce chapitre présente le design du système optique d’imagerie haut contraste ainsi que dif-férentes analyses réalisées pour optimiser ses performances. Une mise en contexte permet d’abord d’introduire les objectifs du projet et les requis de conception. Les composantes choisies pour de la boucle de contrôle sont ensuite présentées, suivies du design optique du système. Une analyse thermique montrera par la suite quel est l’impact des conditions environnementales sur les performances du système optique. Le design du vAPP sera en-suite présenté et une analyse des tolérances d’alignement sera réalisée pour s’assurer que les requis d’alignement soient bien respectés. Finalement, les dernières sections discutent du système de calibration qui sera utilisé et présente des analyses supplémentaires sur la diffraction, la dispersion chromatique ainsi d’un calcul du budget de photon.
2.1
Mise en contexte
2.1.1 Présentation des objectifs du projet
Le système d’imagerie haut contraste a été développé dans le but de répondre à deux princi-paux objectifs. D’abord, il était désiré que le système permette de réaliser une démonstration d’une boucle de contrôle basée sur la technique du cMWFS. Le second objectif était ensuite de faire une démonstration de la fonctionnalité des composantes du système dans des condi-tions de vol stratosphérique, soit à une altitude d’environ 40 km. Une démonstration dans de telles conditions donne l’opportunité de valider le niveau de maturité technologique d’un coronographe, d’un miroir déformable ainsi que d’une caméra avec contrôleur spatial qui sont trois types de composantes essentielles pour les projets de télescopes spatiaux.
2.1.2 Structure du projet
Le développement du système d’imagerie haut contraste était un projet de collaboration qui a également impliqué le travail de deux étudiants au doctorat en provenance des Pays-Bas.
David Doelman était responsable du design et des simulations théoriques du masque de phase, tandis que Chris de Jonge se chargeait du développement de l’algorithme de contrôle du cMWFS. Ces étudiants étaient affiliés respectivement à l’université de Leiden et le SRON ("Netherlands Institute for Space Research"). Ces collaborations ont permis d’aller chercher l’ex-pertise nécessaire pour compléter le projet et ont également aidé à respecter les délais qui étaient imposés.
2.1.3 Contexte du projet HiCIBaS
Pour réaliser la démonstration en haute altitude, le système optique d’imagerie haut contraste a été intégré comme un sous-système dans le contexte du projet HiCIBaS. Subventionné par l’Agence spatiale canadienne dans le cadre du programme STRATOS et de la bourse FAST ("Flights and Fieldwork for the Advancement of Science and Technology"), ce projet comportait de monter un télescope et différents systèmes d’imagerie à bord d’une gondole pour une nuit de vol dans la stratosphère.
La figure2.1présente le diagramme fonctionnel du système HiCIBaS. Le système comprend trois étapes de correction de la qualité d’image qui sont réalisées successivement par trois sous-systèmes. La lumière d’une étoile cible traverse d’abord le système de guidage qui a pour but de stabiliser la position de l’étoile dans le champ de vue à l’intérieur d’une seconde d’arc (1"). Dans ce premier sous-système, deux caméras de guidage sont utilisées pour corri-ger en boucle fermée l’orientation de pointage d’un télescope Célestron C14. Les vibrations présentent dans le système et les erreurs pointage sont par la suite corrigées en utilisant le senseur de front de bas ordre appelé LOWFS ("Low Order Wavefront Sensor"). Ce deuxième sous-système utilise un senseur de front d’onde pyramidal pour compléter une boucle de contrôle avec un miroir tip-tilt. Cette correction est une condition nécessaire pour atteindre la stabilité de faisceau requise à l’entrée du sous-système d’optique adaptative pour l’ima-gerie haut contraste. Le système optique présenté dans ce mémoire constitue donc le dernier sous-système d’HiCIBaS où seront corrigées les aberrations résiduelles.
La figure 2.2 présente le design optique de la section principale du système HiCIBaS. Les faisceaux entrent dans le télescope puis se propagent à travers l’optique du Front-End dont la fonction est de diriger la lumière vers les trois sous-systèmes. La lumière de l’étoile est séparée entre les instruments en utilisant des filtres dichroïques. Par conséquent, chacun des sous-systèmes couvre une bande spectrale différente. La lumière bleue est utilisée pour guider le télescope, la lumière visible est envoyée vers le LOWFS laissant ainsi le proche infrarouge pour l’imagerie haut contraste.
2.1.4 Conditions d’observation à bord d’un ballon stratosphérique
En haute altitude, les requis pour une boucle de contrôle d’optique adaptative diffèrent beau-coup des exigences pour les systèmes intégrer avec des télescopes terrestres. La résolution
FIGURE2.1 – Diagramme fonctionnel du trajet optique à travers les trois sous-systèmes d’Hi-CIBaS. La lumière de l’étoile est d’abord captée par le télescope du système de guidage (bleu), puis est dirigée vers le système du LOWFS (vert) et le système d’optique adapta-tive pour l’imagerie haut contraste (rouge). Le trajet optique de la lumière est représenté par des lignes pleines et les boucles de contrôle par les lignes pointillées.
des images au sol dépend du diamètre du télescope et également de la qualité d’image du ciel communément appelé "seeing". Le développement mathématique réalisé par Kolmogo-rov offre un modèle qui permet de décrire la limite des performances de correction d’image en fonction du seeing associé aux turbulences atmosphériques [10]. Ce modèle de prédiction est notamment utilisé pour déterminer quels sont les requis en termes de performances de boucle de contrôle pour un site d’observation en particulier. Pour les systèmes utilisés en haute altitude, le modèle de Kolmogorov ne peut cependant pas être utilisé en raison des changements dans la dynamique atmosphérique. À ce jour, le nombre de données recueillies dans ces conditions n’est pas encore suffisant pour établir un bon model prédictif.
Les turbulences atmosphériques à 40 km d’altitude sont relativement négligeables et ne constituent pas la source d’aberrations principales que devra corriger le système d’optique adaptative. Des essais d’imagerie sur ballon stratosphérique ont montré par le passé que la résolution n’est pas limitée par la présence des aberrations atmosphériques, mais plutôt par les vibrations et la limite de diffraction du système d’imagerie. En effet, des images d’Ura-nus obtenues dans le cadre de la mission Stratoscope II (1972) montrent que la résolution est près de la limite de diffraction du télescope [11]. Ce système possédait un télescope de 1m de diamètre et n’utilisait aucun système d’optique adaptative.




![Tableau 3.1 – Erreur résiduelle de surface (nm) pour le miroir PPT111 selon les conditions d’opération [26]](https://thumb-eu.123doks.com/thumbv2/123doknet/3209642.91751/65.918.130.784.357.593/tableau-erreur-résiduelle-surface-miroir-ppt-conditions-opération.webp)
