t£J SHERBROOKE
Faculte de genie
Genie electrique et genie informatique
Commande non lineaire predictive
pour manoeuvres grand-angles de satellites
Memoire de maitrise es sciences appliquees
Specialite: genie electrique
Frederic CLAVEAU
Sherbrooke (Quebec) Canada Septembre 2007
1*1
Published Heritage
Branch
395 Wellington Street Ottawa ON K1A0N4 CanadaDirection du
Patrimoine de I'edition
395, rue Wellington Ottawa ON K1A0N4 CanadaYour file Votre reference ISBN: 978-0-494-37848-9 Our file Notre reference ISBN: 978-0-494-37848-9
NOTICE:
The author has granted a
non-exclusive license allowing Library
and Archives Canada to reproduce,
publish, archive, preserve, conserve,
communicate to the public by
telecommunication or on the Internet,
loan, distribute and sell theses
worldwide, for commercial or
non-commercial purposes, in microform,
paper, electronic and/or any other
formats.
AVIS:
L'auteur a accorde une licence non exclusive
permettant a la Bibliotheque et Archives
Canada de reproduire, publier, archiver,
sauvegarder, conserver, transmettre au public
par telecommunication ou par Plntemet, prefer,
distribuer et vendre des theses partout dans
le monde, a des fins commerciales ou autres,
sur support microforme, papier, electronique
et/ou autres formats.
The author retains copyright
ownership and moral rights in
this thesis. Neither the thesis
nor substantial extracts from it
may be printed or otherwise
reproduced without the author's
permission.
L'auteur conserve la propriete du droit d'auteur
et des droits moraux qui protege cette these.
Ni la these ni des extraits substantiels de
celle-ci ne doivent etre imprimes ou autrement
reproduits sans son autorisation.
In compliance with the Canadian
Privacy Act some supporting
forms may have been removed
from this thesis.
Conformement a la loi canadienne
sur la protection de la vie privee,
quelques formulaires secondaires
ont ete enleves de cette these.
While these forms may be included
in the document page count,
their removal does not represent
any loss of content from the
thesis.
Canada
Bien que ces formulaires
aient inclus dans la pagination,
il n'y aura aucun contenu manquant.
Vu la popularity grandissante des satellites agiles, la commande de satellites effectuant des manoeuvres grand-angles est un domaine de recherche tres important. Comme la dy-namique d'un satellite effectuant rapidement des manoeuvres grand-angles est hautement non lineaire, les techniques de commande lineaire sont mal adaptees. Les techniques de commande non lineaire sont de mise pour ce type de probleme pour lequel le temps de stabilisation du satellite est tres important. De plus, il faut tenir compte des perturbations exterieures, car celles-ci peuvent degrader les performances du systeme.
La commande non lineaire predictive est une technique de plus en plus etudiee en ae-rospatiale et a ete appliquee au mouvement grand-angle de satellite. Toutefois, les al-gorithmes developpes n'offrent pas une bonne robustesse par rapport aux perturbations exterieures. De plus, l'utilisation de ces algorithmes ne donne aucun controle sur la tra-jectoire emprunte par le satellite, car ils sont optimaux au sens mathematique seulement.
Un algorithme de commande non lineaire predictive est done propose pour pallier a ces desavantages.
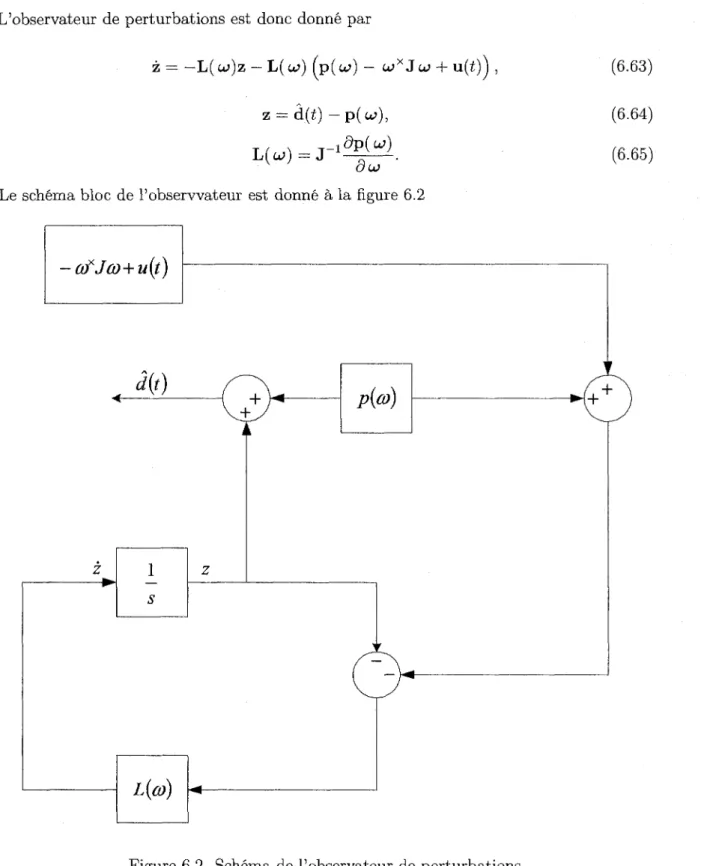
La difference fondamentale entre l'algorithme de ce memoire et les algorithmes predic-tifs existants est que celui-ci est congu pour etre optimal predictif au sens physique et non seulement au sens mathematique. Un observateur de perturbation exponentiellement stable est developpe pour estimer les perturbations exterieures et compenser celles-ci en les soustrayant du vecteur de commande. Une loi de guidage innovatrice est ensuite de-veloppee aim de tenir compte de la limite des actionneurs et des capteurs. II est ensuite demontre que la combinaison de l'observateur de perturbation et de la loi de guidage permet au satellite d'etre tres robuste par rapport aux perturbations exterieures et aux incertitudes de la matrice d'inertie.
Je tiens principalement a remercier mon directeur de recherche, Jean deLafontaine, pour son soutient technique et financier qui m'ont permis d'apprecier pleinement cette expe-rience enrichissante qu'est la maitrise.
Je remercie aussi mon co-directeur de recherche, Yves Berube-Lauziere, pour avoir si bien repondu a mes questions sur la topologie et le calcul differentiel avance.
Finalement, je veux remercier les etudiants du groupe SIgMA qui m'ont offert le soutient moral necessaire a Pachevement de ce memoire.
1 I N T R O D U C T I O N 1
1 Le satellite et ses composantes 5
2 Modelisation de la d y n a m i q u e rotationnelle d u satellite 7
2.1 Equations vectorielles 7
2.1.1 Equations scalaires de la dynamique 11
2.1.2 Equations scalaires de la cinematique 12
2.1.3 Resume du modele du satellite 14
II E t a t de Part 15
3 C o m m a n d e pour m a n o e u v r e s grand-angles de satellites 17
3.1 Structure boucle fermee 17
3.1.1 Controleur de type PD (Derive-Proportionel) par retour de
quater-nions 17
3.1.2 Commande adaptative 28
3.1.3 Commande par modes de glissement 30
3.2 Structure boucle fermee avec saturations 33
3.2.1 Controleur de type PD par retour de quaternions 33
3.2.2 Controleur de type PID par retour de quaternions 37
3.2.3 Commande predictive 40
4 C o m m a n d e predictive et applications a l'aerospatiale 41
4.1 Theorie de la commande predictive continue non lineaire 42
4.1.1 NMPC continue pour systeme affine 42
4.1.2 NMPC continue pour systeme affine version 2 45 4.1.3 NMPC continue avec contraintes sur les entrees 46 4.1.4 NMPC continue avec contraintes sur l'amplitude et la variation des
entrees 47 4.1.5 NMPC continue avec contraintes sur les entrees et les etats 48
4.1.6 Nonlinear Generalized Predictive Control (NGPC) continue 49
4.1.7 N G P C P I D 51 4.2 Applications de la commande predictive a l'aerospatial 51
4.3 Applications de la commande NMPC au controle de satellite 52
5 Problematique 57
5.1 Objectifs du projet 57 5.2 Methodologie 58
III Guidage et commande 61
6 C o m m a n d e 63
6.1 Commande NGPC originale 64 6.1.1 Systeme en boucle fermee 65 6.2 Commande NGPC originale appliquee au satellite 67
6.2.1 Solution sous forme de matrices colonne 67
6.3 NGPC modifie 70 6.3.1 Analyse du NGPC modifie sans perturbations en boucle fermee. . . 75
6.3.2 Observateur de perturbations 79 6.3.3 Analyse de l'observateur de perturbations en boucle fermee 82
6.3.4 Systeme avec perturbations en boucle fermee 83
7 Guidage 85
7.1 Vitesses initiale et finale nulles 88 7.1.1 Resume de l'algorithme 92
IV Simulations 93
8 R e s u l t a t s des simulations 95
8.1 Conditions de simulation 95
8.2 NGPC original (NGPCo) 95
8.3 NGPC modifie 98
8.3.1 Vitesse angulaire initiale nulle 98
8.3.2 Vitesse angulaire initiale non nulle 104
8.3.3 NGPC modifie en saturation 105
8.4 NGPC modifie avec observateur de perturbations 108
8.4.1 Perturbations exterieures 108
8.4.2 Incertitudes de la matrice d'inertie 109
8.5 Loi de guidage 114 9 Synthese et contributions 119 9.1 Synthese 119 9.2 Contributions 120
V Conclusions et perspectives 121
10 Conclusion 123VI A N N E X E S 125
A Vectrices 127A.0.1 Definitions et notations 127
A.l Operations entre vectrices 128
B Parametres de representation d'attitude 131
B.l Quaternions 131
B . l . l Addition 132
B.1.2 Multiplication 132
B.l.3 Le complexe conjugue 133
B.1.4 Norme d'un quaternion 133
B.l.5 Inverse d'un quaternion 133
B.l.6 Rotations a l'aide de quaternions 134
B.l.7 Notes sur les singularites 136
B.l.8 Autres notations pour les quaternions 137
B.l.9 Calcul d'erreur a l'aide des quaternions 139
B.2 Parametres de Rodrigues modifies (PRM) 140
C S y s t e m e s N o n Lineaires 143
C.l Algebre de Lie 143
C.2 Degre Relatif 144
C.3 Theorie de Lyapunov 146
D Solution scalaire d u N G P C original pour satellite 147
E Solution d u N G P C 151
2.1 Corps rigide, (extrait de [HUGHES, p.57]) 8
3.1 Resultats des rotations pour le retour de quaternions, (extrait de [WIE et
coll., 1989]) 22
3.2 Connexion passive du retour de quaternions, (extrait de [LIZARRALDE et
WEN, 1996]) 24
3.3 Connexion passive globale du retour de quaternions, (extrait de
[LIZAR-RALDE et WEN, 1996]) 26
3.4 Comparaison des controleurs par retour de quaternions avec et sans mesure
de w, (extrait de [LIZARRALDE et WEN, 1996]) 27
3.5 Schema du controleur adaptatif de 1' clXG X 29
3.6 Surface de glissement et chattering, (extrait de [UTKIN et coll., 1999]). . . 31 3.7 Resultats du retour de quaternions de type PID, (extrait de [Wie et coll.,
2002]) 39
6.1 Carte des poles du NGPC modifie (NGPCm) en boucle fermee 78
6.2 Schema de l'observateur de perturbations 81
7.1 Acceleration angulaire en fonction du temps, (adapte de [Schaub et coll.,
1996]) 86
7.2 Vitesse angulaire en fonction du temps, (adapte de [Schaub et coll., 1996]). 86 7.3 Position angulaire en fonction du temps, (adapte de [Schaub et coll., 1996]). 86
8.1 Erreur de o\ en fonction du temps 96
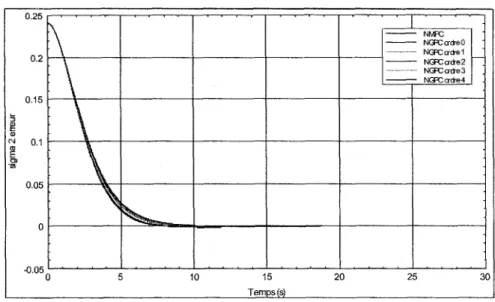
8.2 Erreur de a2 en fonction du temps 97
8.3 Erreur de 03 en fonction du temps 97 8.4 Graphique du chemin emprunte par le satellite 99
8.5 Graphique de Tangle d'erreur $e 100
8.6 Sigma erreur 1 pour NGPC1 et NGPC2 100
8.7 Sigma erreur 2 pour N G P C l et NGPC2 101
8.8 Sigma erreur 3 pour N G P C l et NGPC2 101
8.9 Couple de commande u\ 106
8.10 Couple de commande u^ 106
8.11 Couple de commande u3 107
8.12 Angle d'erreur $e 107
8.13 Sigma erreur avec perturbations pour le NGPC modifie 109
8.14 Graphique de l'erreur de l'observateur de perturbations 110
8.15 Graphique du chemin emprunte par le satellite pour incertitudes sur J. . . I l l
8.16 Graphique des termes croises et de leur estimes pour l'axe x 112
8.17 Graphique des termes croises et de leur estimes pour l'axe y 113
8.18 Graphique des termes croises et de leur estimes pour l'axe z 113
8.19 Graphique des signaux de reference de la loi de guidage 115
8.20 Graphique des modules de u> et a. 116
8.21 Graphique de la sortie sigma 1 116
8.22 Graphique de la sortie sigma 2 117
8.23 Graphique de la sortie sigma 3 117
A.l Un vecteur v et un systeme de reference Ta 127
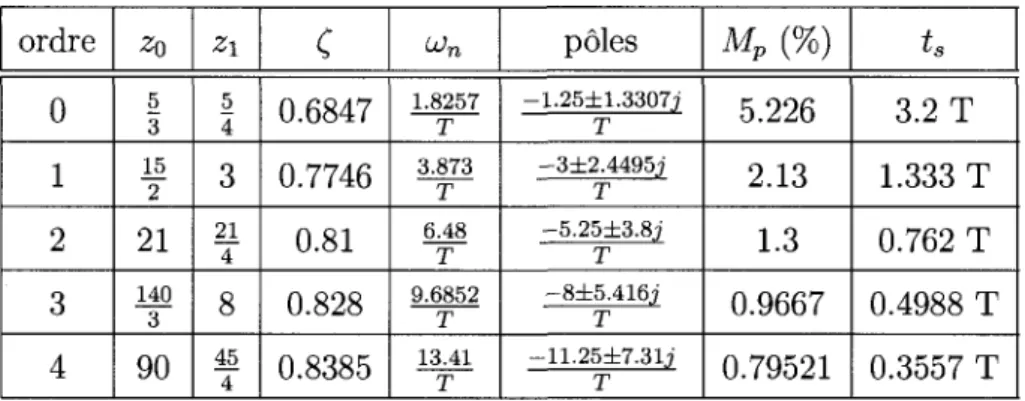
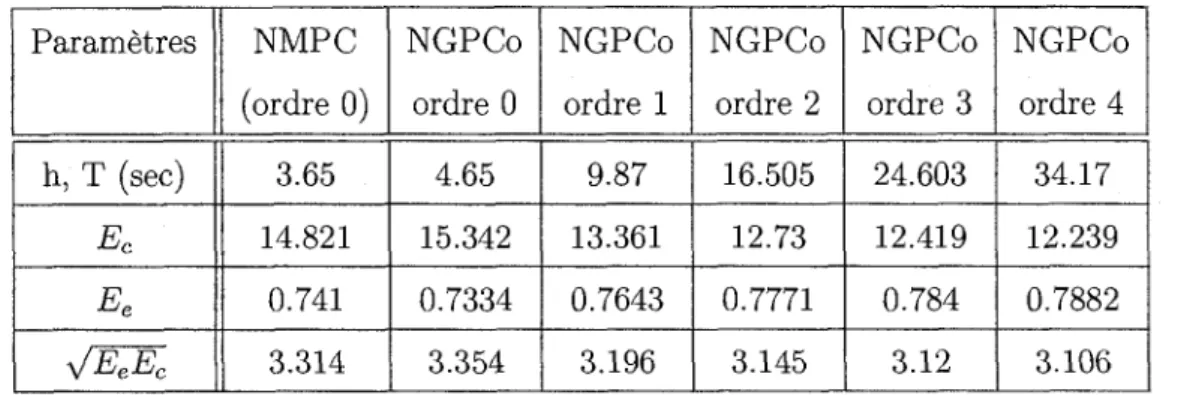
6.1 Tableau des caracteristiques de l'erreur en sortie lorsque le systeme est
soumis a un echelon 77
8.1 Tableau de l'energie de l'erreur et de l'effort de commande pour le NGPCo. 96
8.2 Tableau de l'energie de l'erreur et de l'effort de commande pour le NGPCm. 102
8.3 Tableau de comparaison entre le NGPCo et le NGPCm 103
8.4 Tableau de l'energie de l'erreur et de l'effort de commande pour differents
axes de rotation 103
Symbole Definition
= defini comme etant egale a.
xy Variable x exposant y.
x^ Derive d'ordre y de la variable x.
I • I valeur absolue d'une variable ou d'un scalaire. || • ||2 norme euclidienne d'un vecteur : ||x||2 = \/J2i=ox i-|| • lino norme infinie d'un vecteur : i-||xi-||oo = ,^a5 |£j|.
11 l l ° ° II I I0 0 l<i<n I (l
L/A(x) Derivee de Lie de A(x) par rapport a / : L/A(x) = - ^ p f ( x ) .
p Degre relatif d'une sortie ou du vecteur de sorties d'un systeme. Ci Fonction continue et derivable i fois.
t Variable temporelle.
q Quaternion compose de ses quatre elements q — [gi, (fej 93, Q4]7""• ^4 Partie scalaire d'un quaternion.
q Partie vectorielle d'un quaternion q = [qi, q2, qz]T.
(g) Defini la multiplication de deux quaternions q<g>p = qp.
a Parametre de Rodrigues modifies (PRM) a = [o"i, 02,0-3]r.
u> Vitesses angulaire du satellite autour de ses trois axes u> = [coi, 102,^3] $ Angle de rotation du satellite autour de l'eigenaxis.
to Vitesse angulaire du satellite autour de l'eigenaxis. a Acceleration angulaire du satellite autour de l'eigenaxis.
J Matrice d'inertie du satellite. © Centre de masse du satellite.
C Facteur d'amortissement d'un systeme dynamique.
ujn Frequence naturelle d'un systeme dynamique.
T Horizon de prediction d'un controleur.
Ti Systeme de reference inertiel (fixe par rapport aux etoiles). J7!, Systeme de reference attache au satellite.
A c r o n y m e Definition
MIMO Multiple-input multiple-output SISO Single-input single-output GPC Generalised predictive control
CGPC Continuous generalized predictive control SGPC Stable generalized predictive control MPC Model predictive control
NMPC Nonlinear model predictive control
NGPC Nonlinear generalized model predictive control PD Proportional-Derivative
PID Proportional-Integral-Derivative S/C Spacecraft (Satellite)
LTI Linear time invariant SPR Strictly positive real
PRM Modified Rodrigues Parameters
I N T R O D U C T I O N
Beaucoup de missions spatiales sont des missions de pointages fins, c'est-a-dire un satel-lite qui tourne en orbite autour de la Terre et qui pointe vers une cible terrestre fixe. Dans ce type de missions, le satellite change d'orientation tres lentement dans le seul but de corriger les petites erreurs d'orientation dues a son orbite, a la rotation de la Terre et aux perturbations exterieures. Pour ce type de mission, les techniques de commande d'orientation sont bien developpees et ont fait leur preuve. Cependant, de plus en plus de missions spatiales exigent qu'un satellite puisse etre oriente rapidement vers une attitude finale desiree avec des conditions finales specifiers comme la vitesse et l'acceleration an-gulaire [DELAFONTAINE et LEPEUVEDIC, 2005]. Un exemple de mission qui exige de telles manoeuvres est la prise d'images successives de la Terre ou un satellite doit pointer plusieurs cibles terrestres differentes en un intervalle de temps donne. Une contrainte ne-cessaire dans ce type de missions est que le temps de stabilisation entre deux manoeuvres soit suffisamment petit, car le temps de repositionnement moyen d'un satellite influence l'efficacite de la mission. Un autre exemple d'un satellite qui doit effectuer de grandes ma-noeuvres d'angles rapidement est lorsque certains instruments comme le detecteur d'etoiles doit eviter des astres trop brillants comme le Soleil, la Lune et meme parfois la Terre. Dans ce type de situation, le satellite peut avoir a effectuer plusieurs rotations successives afin qu'une charge utile evite plusieurs astres en un court intervalle de temps. De nombreuses manoeuvres grand-angles pourraient aussi etre necessaires pour l'assemblage orbital dans le cadre de missions terrestres ou interplanetaires.
La commande d'un satellite effectuant des manoeuvres grand-angles peut etre realisee par un systeme de commande en boucle ouverte ou en boucle fermee. La methode en boucle ouverte necessite habituellement une manoeuvre de pointage predeterminee a l'aide des techniques de commande optimale qui requierent la solution de conditions limites. De plus,
la structure de commande en boucle ouverte est sensible aux erreurs de modelisation ainsi qu'aux perturbations imprevues. La methode de commande en boucle fermee peut tenir compte, directement ou indirectement, des erreurs de modelisation et des perturbations. Ces caracteristiques de la methode de commande en boucle fermee font qu'elle est plus robuste que la methode de commande en boucle ouverte et constitue done une meilleure solution.
La dynamique hautement non lineaire d'un satellite effectuant de rapides manoeuvres grand-angles fait en sorte que la commande lineaire n'est pas bien adaptee a ce type de probleme. Plusieurs methodes de commande non lineaires ont ete appliquees a ce probleme dont certaines sont decrites en detail dans la section de l'etat de l'art. Depuis quelques annees, la commande non lineaire predictive a suscite un interet marque dans le domaine de l'aerospatiale. Apres avoir ete appliquee avec succes sur un avion [KHAN et LU, 1994], la commande de type Nonlinear Model Predictive Control (NMPC) a ensuite ete appliquee a un satellite rigide [CRASSIDIS et coll., 1997] ou il a ete demontre que la commande predictive est plus efficace que la commande par retour de quaternions. Le NMPC a ensuite ete applique a un satellite flexible [BANG et OH, 2004].
La commande predictive a suscite de l'interet, car elle comporte de nombreux avantages par rapport aux autres methodes de commande modernes : elle peut traiter les systemes a phase non minimale et les systemes instables en boucle ouverte et elle peut prendre les contraintes physiques en consideration a meme la conception du controleur. De plus, contrairement aux autres techniques de commande moderne, la commande predictive tient compte des erreurs futures estimees au lieu de tenir compte des erreurs passees. Ceci est un grand avantage lorsque revolution de la trajectoire de reference est connue a priori, car le systeme de commande peut reagir avant meme que la trajectoire n'ait ete rnodifiee.
Le projet de recherche concerne done la mise au point d'un algorithme de commande non lineaire predictive permettant de controler, de fagon efficace et securitaire, un satellite qui effectue des manoeuvres grand-angles. Contrairement aux algorithmes de commande predictive utilises precedemment pour les mouvements grands-angles, celui-ci devra etre optimal sur un horizon de prediction au lieu d'un point ponctuel dans le temps (comme
NMPC). De plus, le resultat sera un controleur d'ordre superieur a zero, ce qui permet d'obtenir plus de liberte pour la comception du controleur et done de meilleurs perfor-mances. Cet algorithme devra aussi etre optimal du point de vue physique, e'est-a-dire que l'erreur fourni au controleur representera une rotation contrairement aux techniques employees precedemment et presentee en detail dans une section ulterieure. Ceci a pour consequence que le satellite empruntera le chemin le plus court et celui-ci necessitera done moins d'effort de commande. De plus, le systeme en boucle fermee devra etre robuste aux perturbations exterieures et aux incertitudes de la matrice d'inertie. Ce nouvel algorithme sera ensuite compare a l'algorithme de CRASSIDIS et coll. [CRASSIDIS et coll., 1997] qui est d'ordre zero.
La premiere partie du memoire developpe les equations de la dynamique du satellite et presente la cinematique sous forme de parametres de Rodrigues modifies (PRM). La deuxieme partie decrit l'etat de l'art de la commande predictive non lineaire et les me-thodes utilisees jusqu'a maintenant pour controler des satellites effectuant des manoeuvres grand-angles. La troisieme partie presente les contributions de ce memoire : une nouvelle loi de commande de type Nonlinear Generalized Predictive Control (NGPC) qui est modifiee et appliquee a un satellite, un observateur de perturbations pour estimer les perturba-tions exterieures et une loi de guidage permettant d'eviter la saturation des actionneurs et des capteurs. La quatrieme partie presente les resultats des simulations de la loi de commande NGPC et compare ceux-ci aux resultats donnes par les lois de commande exis-tantes. Le memoire se termine finalement par une discussion des contributions apportees et des perspectives pour des recherches futures.
Modelisation de la dynamique rotationnelle
du satellite
Le but du present chapitre est de developper les equations de la dynamique et de la
cine-matique rotationnelle d'un satellite dans le but d'utiliser celles-ci pour faire du controle
d'attitude. L'auteur de cet ouvrage conseille au lecteur de lire l'annexe A avant
d'entre-prendre la lecture de ce chapitre. Le developpement mathematique des equations est tire
des chapitres 3 et 4 du livre de Peter C.Hughes [HUGHES, 2004].
2.1 Equations vectorielles
Le satellite est modelise par un corps rigide tel que represents a la figure 2.1. L'orientation
du satellite par rapport au systeme referentiel inertiel Ti est exprimee a l'aide du systeme
referentiel T\> attache au satellite au point O. La position du satellite par rapport a Ti est
exprimee a l'aide du vecteur R
0. Dans le cas du present projet de recherche, le systeme de
reference T\, est considere comme etant attache au centre de masse du satellite, c'est-a-dire
que r
c= 0.
Le moment angulaire absolu du satellite par rapport au point O est donne par
h0 = / r x vdm. (2.1)
ou v est la vitesse absolue de l'element de masse dm
v* = R = R0 + f. (2.2)
Pour tout vecteur quelconque denote u, la derivee de celui-ci vue du repere inertiel est donnee par
o
u = u + u> x u. (2.3)
o
ou (•) represente la derivee du vecteur vu par un observateur fixe par rapport au repere tournant T\, et cD est la vitesse angulaire du repere tournant par rapport au repere inertiel.
Le vecteur v peut done etre ecrit de la fagon suivante
v = R0 + (F + u ;6x r ) , (2.4)
o
ou u>b represente la vitesse angulaire du satellite par rapport au repere inertiel et r
repre-o
sente la variation du vecteur r par rapport au referentiel T\,. Le terme r est egal a zero, car le satellite est considere comme etant un corps rigide.
Le vecteur de vitesse absolue peut done etre represente par
v = v0 + u)b x r. (2.5)
L'equation 2.1 peut maintenant etre ecrite de la fagon suivante
h0 = / r x (v0 + u>b x r) dm, (2.6)
= / r x v0 dm — / r x (r x u)h) dm, (2.7)
= e x v0- / ((r- w6) r - ( r - r ) wb) dm. (2.8)
ou c = Jfdm = vcm est la somme de l'apport de chaque element de masse, v0 ne
depend pas de dm, car chaque element de masse a la meme vitesse angulaire et l'identite u x (v x w) = (u • w ) v — (u • v ) w a ete utilisee.
Deux vecteurs places cote a cote sans produit scalaire ou vectoriel definissent une dyade en utilisant les proprietes suivantes
v • (uw) = (v • u ) w (2.9)
(uw) • v = (w • v ) u (2.10)
Une dyade a la propriete que la multiplication scalaire de celle-ci avec un vecteur donne un vecteur.
En utilisant les proprietes mentionnees ci-haut, L'equation 2.8 peut etre reecrite
h0 = c x v0 + / ( ( r2I - rr) dm) • u>b, (2.11)
3
ou J est le tenseur (ou dyade) d'inertie, I est une dyade unitaire et uj\, peut etre sorti de l'integrale, car tous les elements de masse tournent a la meme vitesse angulaire.
Comme le referentiel Tb est considere comme etant au centre de masse, c = 0 et l'equation finale pour le moment angulaire absolu du satellite est done donnee par
ho = J - w6. (2.12)
II faut ensuite appliquer la deuxieme loi de Newton pour le mouvement en rotation
t = E T - - (2-13)
ou Tex inclut les perturbations exterieures et les couples generes par les propulseurs.
En utilisant la formule 2.3, la variation du moment angulaire absolu devient
o
h0+w6xh0 = X)Tl, (2.14)
En inserant l'equation 2.12 dans l'equation 2.14, l'equation suivante est obtenue pour la dynamique du satellite en rotation
J - £6+ W6X ( J - W6) = £ T L .
(2.15)
o
2 . 1 . 1 E q u a t i o n s scalaires de la d y n a m i q u e
En utilisant les equations A.2, A.5 et A.6, l'equation 2.15 exprimee dans le referentiel attache au satellite (figure 2.1) devient
o
(f
bTJ
bf
b) • ( j f u * ) + ((u
bb)
TT
bx # > « > ) = J2f
hTT
bex,
f
b«A + ({u
bb)
TT
bx # > o , j ) = E ^ T L ,
- r , - z±T(f
bTJ
b?
b) • (f
bTty + ((utFn x #>«$) = E ^ T L , (2.16)
oou l'equation 2.16 a ete obtenue avec la definition Tb— 0. L'equation suivante est obtenue en applicant la propriete A.9
f
bT3
bk + ((
W*f £ x f
bTJ
bu>
bb) = J2f
bTT
bex.
La simplification suivante est obtenue en observant que le terme J*u>b est une matrice colonne et en utilisant la propriete A. 10
- : T .
— Tlb,\b i -rTI. .b\x -fb , .6
T
bJ
bu
bb+ r
b(u,
byj
bu>
b= Y,F
bT;
,6 ex' (2.17)O U U>1= (jJl.
L'operation Tb- est appliquee des deux cotes de l'equation 2.17 et la propriete A.9 est ensuite appliquee pour donner l'equation finale, sous forme matricielle, de la dynamique rotationnelle du satellite
j
b= J-
1(-^Ju;
b+ J2^e
X)
Ub (2.18) ou x A 0 — to>3 U>2 CO3 0 —UJi —Li>2 &1 0et l'indice representant le referentiel dans lequel le vecteur est exprime est omis pour alleger l'ecriture.
Sous forme scalaire, la dynamique du satellite est donnee par
Jxx^x — JxyUy — Jxz^z — (Jy ~ Jz) UyU)z + \Jzx^>y ~ Jyx^z) ^x + Jzy^y ~ Jyz^z+Tx, ( 2 . 1 9 )
Jyydly — Jyx^x ~ Jyz^z = {Jz ~ Jx) WXU)Z + {JxyLOz — JzyLOx) LOy + JXZU)Z — Jzx00x + Ty, ( 2 . 2 0 )
Jzz&z — Jzx^x — Jzy^y = \JX — Jy) UxUJy + (JyzLOx — JxzWy) Wz + JyxU)x — JxyLOy + Tz. ( 2 . 2 1 )
Si la matrice J est diagonale, les equations se reduisent a
LOx — -j—^iJy — JzjLJyWz+TxJ,
JXx
Coy = —- ( (Jz - Jx) LOXLUZ + Ty}, (2.22)
= y - ( {Jx ~ Jy) Ux^y + Tz) .
J,
Les equations de la dynamique rotationnelle du satellite vont etre utiles pour analyser les divers types de systemes de commande du prochain chapitre.
2.1.2 Equations scalaires de la cinematique
Les equations de la cinematique du satellite doivent aussi etre prises en compte lors de la conception de lois de commande. L'orientation du satellite est exprimee a l'aide des pa-rametres de Rodrigues modifies (PRM) qui sont exprimes par l'equation suivante [SHUS-TER, 1993] (voir Annexe B pour plus details sur les PRM) :
cr = tan - u . (2.23)
ou $ est l'angle de rotation autour de l'axe de rotation u (eigenaxis).
La variation des parametres de Rodrigues est reliee a la vitesse angulaire du satellite a l'aide de la formule suivante
ir = G(<r)u>, (2.24)
ou
L'equation 2.23 montre que les PRM possedent une singularite a <i> = ±360°n ou n est un entier. Les singularities peuvent etre evitees en utilisant le shadow set represents par
c 1 $
crs = — - e r = - c o t - u . (2.26)
crT a 4 '
Le shadow set possede une singularite a 0° et peut done etre utilise pour eviter les singu-l a r i t y a ±360°.
Dans le present ouvrage, les parametres d'orientations vont etre changes pour le shadow
set lorsque crT cr = 1. Cela implique que la norme du vecteur va etre bornee entre 0 < || or || < 1 et Tangle de rotation sera done borne entre -180° < $ < 180° [SCHAUB et coll., 1996]. Le satellite empruntera done le plus court chemin a chaque manoeuvre. De plus, la norme du vecteur est preservee lorsque le point de changement se fait ou crT cr = 1, car
<TS = -<T.
II est a noter que le shadow set repond a la meme equation differentielle que cr, e'est-a-dire que crs = G ( c rs) a ; .
Sous forme scalaire, la cinematique du satellite est donnee par
1 1 1
o-x = -(1 + al - a% - a2z)ujx +-(axo-y - az)u;y +-(axaz + ay)ujz,
Oy = -^PxOy + oz)ux + - ( 1 - a2x + a2y - a2z)uy + -(ayaz - ax)u;z, (2.27)
2.1.3 Resume du modele du satellite
Sous forme matricielle, le satellite est done totalement modelise par le systeme d'equations differentielles suivant u; = J -1( - u ;> <J u ; + ^ Te x) . (2.28) 1 — a1 a I + c r > e r e r v, (2.29) ou 0 —CT3 (72 <T" = 0 3 0 — <7\ —a2 01 0
Les equations 2.28 et 2.29 seront utilisee pour faire la conception du systeme de commande du present projet presente au chapitre 6.
Avant de presenter le developpement de la technique de commande du present projet, les techniques de commande existantes pour mouvement grand-angles de satellite seront presentees au prochain chapitre. Les techniques utilisent, pour la plupart, les quaternions comme parametre de representation d'attitude. Un quaternion est une matrice colonne de quatre composantes qui est utilisee pour calculer l'orientation du satellite (voir annexe B). L'equation de cinematique 2.29 sera done remplacee par
9i 93 94 = 2E( ? )W = Qi ~Q3 <72 93 94 - 9 1 - 9 2 9i 94 - 9 i - 9 2 - 9 3 w i oo2 L03 (2.30)
L'auteur de ce document conseille fortement le lecteur de lire l'annexe B avant d'entre-prendre la lecture du prochain chapitre.
C o m m a n d e pour manoeuvres grand-angles
de satellites
Ces dernieres annees, il y a eu beaucoup d'efforts concernant le developpement de systemes de commande pour le mouvement grand-angle de satellites. Le tout a commence au debut des annees 1980 avec le developpement de solutions en boucle ouverte. Celles-ci sont cependant sensibles aux erreurs de modelisation et aux perturbations exterieures. Les solutions recentes sont en boucle fermee. Elles sont beaucoup plus fiables et seront done discutees en detail dans ce chapitre.
3.1 S t r u c t u r e boucle fermee
3.1.1 Controleur de type PD (Derive-Proportionel) par retour de
quaternions
Un systeme de commande pour manoeuvre grand-angle utilisant le retour par quaternions a ete developpe en 1985 [WIE et BARBA, 1985]. Pour ce probleme, le quaternion d'erreur est defini comme etant
<1B/B* = 1iIB* ® QB/I, (3-1)
ou qB/B, represente l'inverse de la rotation que le systeme de reference attache au satellite doit faire pour qu'il ait l'orientation commandee, qB ,7 represente l'inverse de la rotation
que le systeme de reference du satellite doit faire pour etre parallele au systeme de reference inertiel et qi/s* represente l'orientation commandee par rapport au systeme de reference inertiel (voir l'annexe B pour plus d'informations sur les rotations d'erreurs utilisant les quaternions). Pour simplifier la notation, le quaternion qB/B* sera ecrit comme etant le quaternion qe = [qe ge4] = [qe\ qe2 ge3 qeA] ou qei est la composante scalaire du quaternion.
Dans leur article, WIE et BARBA presentent trois lois de commande par retour de qua-ternions Loi 1 : Loi 2 : Tx = -TciKq^ + KM), (3.2) T2 = -Tc(Kqe2 + K2u2), (3.3) T3 = -Tc (Kqe3 + K3LO3) , (3.4) 7\ = -TC[K^ + K M \ , (3.5) TeA <&A • Qe3 lei T2 = -Tc[K^f + K2uj2), (3.6) lei T3 = -TC[K^ + K3UJ3), (3.7) Loi 3 : 7i = - Tc (sgn(qe4)Kqel + Kiu>i), (3.8) T2 = -Tc(sgn{qe4)Kqe2 + K2L02), (3.9) T3 = -Tc(sgn(qe4)Kqe3 + K3u;3), (3.10) ou sgn(qei) represente le signe de ge4, K et Ki sont des gains positifs, Tc est le couple
maximal d'un propulseur et 7* sont les couples de commande appliques au satellite.
Les trois lois de commande ci-dessus sont analogues a une retroaction classique de type PD, car le couple est fonction de la position (qei) et de la vitesse angulaire u>.
Les lois 1 et 3 sont equivalentes lorsque qe4 > 0, mais ont des comportements differents en boucle fermee lorsque ge4 < 0. Lorsque qe4 = cos(<p/2) < 0, alors <p > 180 et les lois 2 et 3 vont faire la difference entre les angles (f> = 180 + $ et <f> — —180 + $ ( $ est un angle positif). Les lois 2 et 3 vont done commander au satellite un angle de ^ = —180 + $ au lieu de 4> = 180 + $ , ce qui donne une plus petite distance angulaire, done moins d'effort et un temps de reaction plus petit. Contrairement aux lois 2 et 3, la loi 1 ne commandera
pas au satellite le chemin angulaire le plus court. Contrairement a la loi 1 et 3, le signal de commande de la loi 2 peut devenir infini, done instable, lorsque qe± = 0.
Mis a part le cas mentionne ci-haut, WIE et BARB A ont prouve que les lois de commande sont globalement asymptotiquement stables en utilisant la methode directe de Lyapunov [WIE et BARBA, 1985] (voir theoreme 4.1 de l'annexe C pour la theorie de Lyapunov).
Au lieu de controler le satelllite axe par axe, Wie et coll. ont developpe un algorithme de commande pour faire tourner le satellite autour de l'eigenaxis [WIE et coll., 1989]. En effet, le theoreme d'Euler stipule que toute reorientation d'un corps rigide peut se faire autour d'un seul axe de rotation equivalent appele axe d'Euler ou eigenaxis (voir Annexe B pour plus de details). Tourner le satellite autour de l'axe d'Euler est optimal, car l'angle d'Euler est la plus petite distance angulaire permettant au satellite de se reorienter [MEYER, 1971]. Si on utilise des rotations successives autour d'axes differents de l'eigenaxis, alors le temps de manoeuvre peut etre considerablement plus long. Ceci est un desavantage, car le temps de repositionnent moyen du satellite affecte la performance de la mission.
Le satellite est modelise a l'aide des equations suivantes
JOJ = u;xJu> + u, q = - E ( g ) w . (3.11) (3.12) ou E(q) = (3.13) <?4 ~Q3 <?2 ~<b q\ <?4 -qx -q-i -qz
et J est la matrice d'inertie qui n'est pas necessairement diagonale. La notation utilisee pour les quaternions est la deuxieme notation de l'annexe B avec q = [q q4] — [qi q2 q3 q<x] • La retroaction est definie par la formule suivante
ou D et K sont des matrices constantes de dimensions 3 x 3 contenant les gains du contro-leur necessaires a chaque axe. Le terme — U}X3OJ est utilise pour compenser, a l'avance,
l'effet du couplage gyroscopique. Le terme qe est la matrice colonne constitute des trois
premieres composantes du quaternion d'erreur qe. L'article considere seulement le cas du regulateur ou le satellite doit etre controle vers le systeme referentiel inertiel. Comme le quaternion representant le referentiel inertiel est (0,0,0,1), le quaternion d'erreur se reduit au negatif du quaternion d'orientation qe = —q.
En inserant l'equation 3.14 dans l'equations 3.11 et en considerant que D = dJ et K = kJ, les equations suivantes sont obtenues pour le systeme en boucle fermee
UJ = —doj — &qe, (3.15)
q'eA = ~ 2u ; T q e- ^3 - 1 7)
ou d et k sont deux scalaires positifs.
L'equation 3.15 indique que u> et qe seront paralleles pour tout t > 0 si a>(0) et qe(0) sont
paralleles a t = 0. De plus, avec a;><qe= 0, l'equation 3.16 montre aussi que u>(£) et qe(t)
sont parallele pour t > 0. La rotation est done une rotation autour de l'axe d'Euler qe(0)
lorsque u;(0) et qe(0) sont paralleles a t = 0.
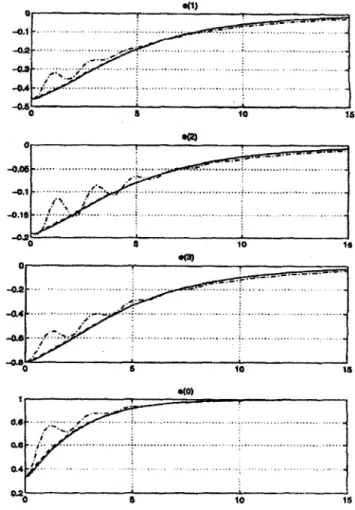
Quatre controleurs differents ont ete simules par WIE et BARBA et les graphiques de
qi vs qj , i = 1,2,3 (i ^ j) (quaternions d'erreurs) pour chaque controleur ont ete traces
dans le but de visualiser quel controleur fait tourner le satellite autour de l'axe qui est le plus pres de l'eigenaxis (figure 3.1). Comme les composantes vectorielles d'un quaternion sont donnees par
q = s i n - ^ u ( t ) . (3.18)
le rapport des composantes entre elles va donner 7 = Ui/iij, i 7^ j et ce nombre doit etre une constante lorsque le satellite tourne autour de l'eigenaxis. Ceci veut done dire que le graphique de g» vs qj, i ^ j doit etre une droite de pente 7 quand le satellite tourne autour de l'eigenaxis.
La matrice d'inertie suivante est consideree pour le satellite
1200 100 - 2 0 0 100 2200 300 - 2 0 0 300 3100
(3.19)
Les quatre controleurs ont la meme matrice de gain D — 0.316 diag(1200, 2200, 3100). L'objectif est que le satellite parcourt un angle de 161.7 degres en 50 sec pour avoir la meme orientation que le systeme de reference inertiel.
Les quatre controleurs sont les suivants
1. Cas 1 [MORTENSEN, 1968] :
Ki k_
J*'
(3.20)K = dm#(201,110,78),
2. Cas 2 [WIE et BARBA, 1985] :
K = kl, K = diag(110,110,ll0), (3.21) 3. Cas 3 4. Cas 4 : K = ( a J + /?I)~\ K = dia0(72,llO,2O4), K = A;J, K = dia0(6O,llO,155), (3.22) (3.23)
Les deux premiers controleurs n'ont pas ete congus pour faire tourner le satellite autour de l'axe d'Euler et les resultats des graphiques le demontrent clairement. Le troisieme controleur a ete calcule (dans cet article) avec une fonction de Lyapunov dans le but de garantir la stabilite du systeme en boucle fermee lorsque les termes gyroscopiques ne sont pas annules. Les gains a et /3 de ce controleur ont ete calcules dans le but de minimiser Tangle entre l'eigenaxis et l'axe de rotation reelle lorsque J est diagonale. Comme la
Figure 3.1 Resultats des rotations pour le retour de quaternions, (extrait de [WIE et coll., 1989]).
matrice d'inertie n'est pas diagonale, le satellite ne tourne pas exactement autour de l'axe d'Euler. Le developpement du quatrieme controleur a ete presente dans cette section et a ete congu pour faire tourner le satellite autour de l'eigenaxis et la stabilite est prouve lorsque les termes gyroscopiques sont annules par anticipation. Les graphiques pour ce controleur demontrent que le satellite tourne autour de l'eigenaxis, car le chemin entre qi
e t Qj (i ^ J) est une ligne droite. Ce controleur est done robuste face aux incertitudes de
la matrice d'inertie.
II a aussi ete prouve que le systeme est globalement stable meme lorsqu'il y a des in-certitudes sur la matrice d'inertie du satellite si K = kl ou I est la matrice identite. Cette robustesse en stabilite implique cependant que le satellite ne tournera pas autour de l'eigenaxis.
Le controleur par retour de quaternions a ete generalise en traitant le cas du suiveur de trajectoire dans [WEN et KREUTZ-DELGADO, 1991] avec adaptation de la matrice
d'inertie. Le developpement des lois de commande se fait avec les equations representees sous forme vectorielle, c'est-a-dire sans coordonnees. La stabilite asymptotique globale des controleurs est demontree en utilisant des fonctions de Lyapunov qui sont construites a partir de l'energie totale du systeme.
Toutes les lois de commandes de type PD par retour de quaternions presentees jusqu'ici necessitaient la mesure de la vitesse angulaire du satellite. En utilisant le principe de la passivite decrit plus bas, il est possible de concevoir un regulateur de type PD par retour de quaternions sans mesure directe de la vitesse angulaire [LIZARRALDE et WEN, 1996]. Pour ce faire, la vitesse angulaire du satellite est remplacee par un filtre non lineaire qui est fonction du quaternion d'erreur. Le systeme est modelise a l'aide des equations suivantes
w = - J_ 1o ;x J w + J_ 1u ( t ) , (3.24)
q = ^ E (g) w . (3.25)
ou E(g) est donne par la matrice 3.13.
Le couple de commande du controleur conventionnel de type PD par retour de quaternions est donne par la formule suivante (le terme pour enlever le couplage gyroscopique n'est pas inclus)
u(i) = —fcpqe — kvu> (3.26)
Ce controleur peut aussi etre considere du point de vue de la passivite en ecrivant le couple de commandes de la facon suivante (voir figure 3.2)
u(t) = -kpqe + v. (3.27)
Pour qu'un systeme soit passif, il faut qu'il existe une fonction scalaire non negative V(x) qui satisfasse V(0) = 0 telle que
/ yTudt>V(x)-V(x(0)), (3.28)
Jo
ou u represente le vecteur d'entrees du systeme, y represente le vecteur de sorties du systeme et x represente le vecteur d'etats du systeme. Si on a egalite stricte dans la relation 3.28, le systeme est dit passif et sans perte.
V +
• ^ " .J
kDynamique
du satellite
is*
P
m
<it
Figure 3.2 Connexion passive du retour de quaternions, (extrait de [LIZARRALDE et
WEN, 1996]).
La fonction de Lyapunov utilisee pour la preuve de passivite est construite a partir de
l'energie totale du systeme par rapport au referentiel inertiel
1
V = k
p[(q
e4- l)
2+ q£q
e] + -w
TJa;.
(3.29)
En utilisant les equations 3.24 et 3.25 et quelques manipulations algebriques, on obtient
la fonction de Lyapunov donnee par
V = u;
T(u + A;
pq
e).
(3.30)En utilisant la formule 3.27 qui represente le signal d'entree, la derivee de la fonction de
Lyapunov peut etre ecrite comme suit
V =
UJTV.(3.31)
En integrant des deux cotes de l'equation 3.31, la relation suivante est obtenue
[u
Tvdt = v(q
e(T)MT))-V(q
e(P),u>(0)), (3-32)
L'equation 3.33 remplit la condition de l'equation 3.28 et ceci prouve done que le transfert d e v a u represents de la figure 3.2 est passif.
La retroaction de vitesse v = C{OJ) est generalises de la fagon suivante (voir figure 3.3)
^E(ge)u;
C(w) = 2ET(qe)Cv(s)
= 2ET (qe)Cv(s)qe. (3.34)
ou Cv(s) est un systeme lineaire invariant dans le temps (LTI) reel strictement propre et strictement positif (SPR), s est la variable de Laplace et C(UJ) est un systeme passif. A partir de l'equation 3.25, w peut etre trouve
u> = 2ET(qe)qe. (3.35)
Cela implique done que C{UJ) est un filtre qui prend la vitesse angulaire mesuree comme entree et qui donne comme sortie la vitesse angulaire mesuree filtree.
Le signal de commande est done donne par la formule suivante
u = -A;pqe - 2ET(ge)z. (3.36)
ou z est la sortie de Cv(s) ayant qe comme entree.
En utilisant le fait que le systeme represents a la figure 3.2 et que le systeme C{UJ) sont passifs, LIZARRALDE et WEN prouvent que qe et ui tendent vers zero pour n'importe
quelles conditions initiales lorsque le signal de commande est donne par la formule 3.36.
Le signal de commande de la formule 3.36 necessite la mesure directe de la vitesse angulaire du satellite. Le but est maintenant de faire le meme controleur, mais sans la mesure de la vitesse angulaire. Les auteurs considerent une realisation minimale de Cv{s) donnee par le systeme suivant
x = A x + Bqe, (3.37)
Systems passlf de v km
u =
0
Systeme strictemerrt passif de g
4& v
Figure 3.3 Connexion passive globale du retour de quaternions, (extrait de [LIZAR-RALDE et WEN, 1996]).
Comme Cv(s) est un systeme SPR, le theoreme de Kalman-Yakubovich-Popov stipule qu'il existe des matrices definies positive P et Q telles que [KHALIL, 2002]
ArP + P A = - Q , (3.39)
P B = CT, (3.40)
ou les matrices A, B et C sont les matrices des equations 3.37 et 3.38.
La vitesse angulaire du satellite peut done etre omise en remplagant z = Cv(s)qe par z = sCv(s)qe. Comme Cv(s) est strictement propre, sCv(s) est propre, done realisable. Le nitre non lineaire qui est fonction du quaternion d'erreur et qui permet d'omettre la mesure de la vitesse angulaire est realise a l'aide des formules suivantes
z = C x i ,
= BTPT( A x i + Bge).
ou les simplifications pour z ont ete faites en utilisant les equations 3.39 et 3.40.
(3.42) (3.43)
LIZARRALDE et WEN prouvent que u; et qe tendent asymptotiquement vers zero pour
n'importe quelles conditions initiales. La figure 3.4 donne les resultats de la simulation du controleur qui utilise la mesure de la vitesse angulaire et du controleur qui utilise le nitre non lineaire du quaternion d'erreur.
0 -o.t • 0 . 1 * - O S
m
1 _^~~*H~*~*'~""'~
-J>
/"«• / V > * sjp*0 m • • i n - ,— —i——„-.,.,—„.—.•••,„„,—-Fig. 3. Error attitude unil quaternion elements. In all cases fcp = 4, fc„ = 8; (solid line): PD with to measurement; (dash dotted line): PD with
-A = fl = J; (dashed line): PD with -A = JB = 107.
Figure 3.4 Comparaison des controleurs par retour de quaternions avec et sans mesure de w, (extrait de [LIZARRALDE et WEN, 1996]).
3.1.2 Commande adaptative
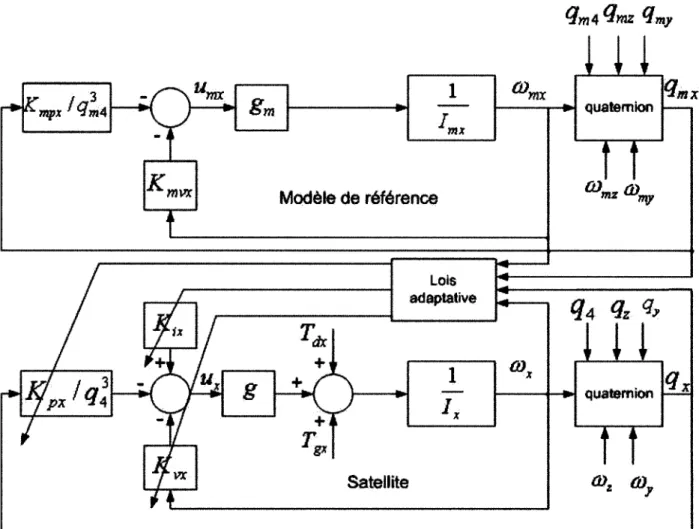
Une technique de commande adaptative pour manoeuvre grand-angle de satellite a ete de-veloppee en 1986 [BOSCH et coll., 1986]. Pour cette technique de commande, le controleur doit forcer le satellite a suivre un modele de reference. Le modele de reference represente le comportement desire du satellite. De plus, le modele de reference est mis a jour en temps reel pour ameliorer la performance du systeme. Les rotations du satellite sont faites avec les quaternions en utilisant la premiere notation de l'annexe B.
Le modele de reference que le satellite doit suivre est un modele ideal de satellite, c'est-a-dire un modele lineaire, decouple, sans perturbations et sans couplage gyroscopique. II est considere sans couplage gyroscopique, car le but est de faire tourner le satellite autour de l'eigenaxis.
Pour l'axe x, le signal de commande qui agit sur le systeme de reference lineaire est la retroaction de quaternions suivante
ou l'indice m signifie que la retroaction est pour le modele de reference. Le signal de commande a la meme forme pour l'axe y et l'axe z.
Le modele representant le satellite est lui aussi considere comme etant lineaire. L'erreur qui est fournie au controleur adaptatif est la difference entre les etats du modele de reference et les etats du modele (lineaire) du satellite. Trois gains sont ensuite calcules de fagon adaptative en fonction de l'erreur et des etats du systeme reel.
Les lois d'ajustement pour les gains de l'axe x du modele physique (non pas le modele de reference) sont trouvees avec une fonction de Lyapunov specifique
Kpx = -ai(p2ielx + P22e2x)qx, (3.45)
Kvx = -a2(p2ieix + P22e2x)ux, (3.46)
Kix = -a3(p2ielx+p22e2x), (3.47)
ou eix represente l'erreur entre l'orientation du modele de reference et celle du satellite et
Les gains a, et pij sont choisis positifs de sortie que la derivee de la fonction de Lyapunov specifique soit negative definie afin que le systeme soit stable.
Le schema du systeme de commande pour l'axe x est represents par la figure 3.5. Les gains des axes y et z sont calcules de la meme fagon et les axes y et z possedent chacun trois lois equivalentes.
Meme si le modele utilise pour le satellite a ete considere comme etant lineaire, il a ete prouve, par simulation, que le controleur adaptatif est tout de meme capable de comman-der les manoeuvres grand-angles du satellite pour faire tourner celui-ci autour de l'axe d'Euler.
ILL
mx
3.1.3 C o m m a n d e par modes de glissement
La commande par mode de glissement ou sliding mode control est une methode qui contraint les etats a suivre une certaine surface (sliding manifold ou sliding mode) dans l'espace d'etats. En premier lieu, la trajectoire des etats est amenee vers la surface desiree de l'espace d'etats en un temps fini. La trajectoire est ensuite contrainte de glisser (sliding) sur la surface desiree [UTKIN et coll., 1999].
Les modes de glissement apparaissent naturellement dans l'espace d'etats d'un systeme lorsqu'il y a des discontinuity dans le membre de droite de l'equation differentielle [UTKIN et coll., 1999]. Pour qu'il y ait une discontinuity dans le membre de droite d'une equation differentielle, il faut que le signal de commande possede des discontinuites. Pour cette raison, le signal de commande est un signal de commutation (discontinue). Cependant, en pratique, le signal de commande n'est jamais parfaitement discontinu, car l'actionneur ne peut commuter a une vitesse infinie. Cela implique que la trajectoire des etats ne reste pas sur la surface desiree, mais oscille autour de celle-ci. Ce phenomene est appele le chattering et a pour consequence de reduire la performance du systeme et peut meme le rendre instable dans certains cas. Un des moyens pour reduire les oscillations est d'utiliser une fonction continue et une fonction de commutation au lieu d'utiliser seulement une fonction de commutation. Ceci permet de reduire l'amplitude de la fonction de commutation et done de reduire les oscillations tout en gardant le controleur de type mode de glissement. Une surface de glissement ainsi que les phases d'approche et le phenomene de chattering sont ilhistres a la figure 3.6
La commande par mode de glissement a ete appliquee pour la premiere fois aux ma-noeuvres grand-angles d'un satellite rigide en 1984 [VADALI, 1986]. Pour la conception du controleur, VADALI utilise un modele linearise du satellite et utilise les quaternions avec la premiere notation de l'annexe B. Premierement, la surface de glissement est trouvee a l'aide de la fonction de cout suivante
1 Z"00 r i
ou ts represente le temps ou les trajectoires arrivent a la surface, OJ represente la vitesse angulaire du satellite, q est le vecteur representant les quatre termes du quaternion et les matrices Q et R sont des matrices symetriques de poids laissees a la discretion du concepteur. La surface ainsi trouvee va done minimiser la fonction de cout qui represente 1' energie totale du systeme par rapport au referentiel inertiel.
Pour reduire les oscillations (chattering) au maximum, le signal de commande est constitue d'une partie continue et d'une partie discontinue (commutation). Les moteurs sont done operes de facon continue jusqu'a ce que la trajectoire des etats atteigne la surface de glissement et les moteurs sont ensuite utilises en mode impulsion pour obtenir la fonction de commutation. VADALI demontre, a l'aide d'une fonction de Lyapunov, que le systeme est asymptotiquement stable. Les simulations de VADALI indiquent que le systeme est robuste face aux incertitudes de modelisation, aux perturbations externes et a la variation des paramatres du systeme, ce qui est une caracteristique de la commande par mode de glissement.
,0.-1)
La commande par mode de glissement a aussi ete appliquee a un modele non lineaire de satellite qui effectue des manoeuvres grand-angles [CRASSIDIS et MARKLEY, 1996]. CRASSIDIS et MARKLEY utilisent des parametres de Rodrigues modifies (PRM) au lieu des quaternions pour representer l'attitude du satellite.
Les quaternions n'ont aucune singularite (voir l'annexe B pour les singularites), mais ne-cessitent quatre parametres au lieu de trois, ce qui fait qu'ils ne representent pas une parametrisation minimale. Les parametres de Rodrigue (PR) (voir l'annexe B) sont repre-sentee par trois composantes, mais possedent une singularite pour un angle de 180°. Ceci pourrait etre surmonte en faisant des manoeuvres successives de moins de 180°, mais cela augmenterait la consommation d'energie. Les parametres de Rodrigues modifies (PRM) ont trois composantes, ils ne possedent pas de contraintes de normalisation comme les quaternions et possedent une singularite seulement pour un angle de 360°. En utilisant les parametres de Rodrigues modifies, le satellite peut faire des rotations de presque 360° et le systeme possede le nombre minimal de sorties possibles. CRASSIDIS et MARKLEY demontrent la stabilite a l'aide d'une fonction de Lyapunov. Les simulations de CRASSI-DIS et MARKLEY demontrent qu'avec l'aide de ce controleur, le satellite peut effectuer des manoeuvres grand-angles sans aucun probleme.
En 2003, une loi de commande par mode de glissement a ete congue pour que les ma-noeuvres grand-angles s'effectuent en un temps minimum [JAN et CHIOU, 2003]. Les surfaces de glissement sont choisies de sorte que l'erreur entre le quaternion de reference et le quaternion mesure soit nulle. De cette fagon, lorsque la trajectoire atteint la surface, elle la suit indefmiment et l'erreur demeure zero. Les rotations se font autour de l'axe d'Euler, ce qui assure que Tangle parcouru pour une rotation sera toujours le plus petit possible. La loi de commande est congue en s'assurant que le moment applique au satellite soit, en tout temps, le maximum que les actionneurs puissent fournir. Le plus petit angle de rotation possible et le plus grand couple possible font que chaque manoeuvre va se faire en un temps minimum. JAN et CHIOU demontrent que le systeme est stable et robuste par rapport aux incertitudes de la matrice d'inertie. Les simulations de JAN et CHIOU
demontrent que cette methode de commande est superieure a la methode conventionnelle de retour par quaternions [WIE et coll., 1989].
3.2 S t r u c t u r e boucle fermee avec saturations
3.2.1 Controleur de type PD par retour de quaternions
Un systeme de commande par retroaction de quaternions a ete developpe pour tenir compte de la saturation des capteurs et des actionneurs [WIE et LU, 1995]. Les capteurs sont des gyrometres et les actionneurs sont des roues a reaction.
Le satellite est modelise par les equations suivantes
Q = - ^ x q ± ^ l - H q H V (3.49)
w = J "1( - w x J w + u), (3.50)
ou J est la matrice d'inertie qui n'est pas necessairement diagonale, q = [q\ q^ qs]T est le vecteur representant les trois composantes vectorielles du quaternion (deuxieme notation de l'annexe B), u> = [u)\UJ2Uz\T est le vecteur de la vitesse angulaire, u = [uiU2Uz\T est le vecteur de commande et
llqf = <£ + qt +
<&-Les equations 3.49 et 3.50 representent un systeme en cascade, car q n'apparait pas dans l'equation 3.50. Les auteurs developpent ensuite un controleur cascade en tenant compte de la saturation des capteurs et des actionneurs.
Premierement, WIE et LU developpent la loi de commande en tenant compte des contraintes imposees sur les capteurs et considere celles imposees sur les actionneurs en second lieu. Le but est de s'assurer que la vitesse angulaire du satellite ne depassera pas la capacite de mesure des gyrometres. Le signal de commande qui est applique au systeme est le suivant
ou
Qe = feel Qe2 toF,
K = diag{k\,k2,kz), P = diag(p1,p2,p3)} (3.52) (3.53) (3.54) s a i ( P qe) = sat(piqel) sat(p2qe2) sat(p3qe3) (3.55)
et ki, Pi et c sont des gains positifs, le terme UJXJUJ est utilise pour compenser, a l'avance, le
couplage gyroscopique et J est la matrice d'inertie qui n'est pas necessairement diagonale.
La fonction de saturation est definie de la maniere suivante
sat(piqei) = PiQei - 1 Vila > 1 - 1 < piqei < 1 Ptqei < - 1 (3.56)
A l'exception de la fonction de saturation et de la matrice de gain P , l'equation 3.51 est identique a l'equation 3.14 lorsque D = dJ et K = kJ.
Le systeme en boucle fermee est donne par le systeme d'equations suivant
Jcj = —Ksat(Pqe) — cJa;, 1 1 Qe Si l'on choisit rCj -Uf X 2 re4 = _ qe + • 7,1^ l T "2U q e
'
1 <7«(0) | "c| | qe( o ) | | KP = U ^maxi \. (3.57) (3.58) (3.59) (3.60) (3.61)ou k = hpei et c sont des scalaires positifs et $m ax est la vitesse angulaire maximale que
1. Le satellite tourne autour de l'axe d'Euler q(0).
2. La vitesse angulaire autour de l'axe de rotation est bornee par ||u>(£)|| < &max pour un c bien choisi (voir Particle pour plus de details).
3. L'erreur d'attitude ||qe(i)|| decroit de fagon monotone.
4. Les vecteurs qe(£) et u(t) s'approchent de zero lorsque t s'approche de l'infini.
Le signal de commande doit maintenant tenir compte de la saturation des actionneurs. WIE et LU negligent le terme gyroscopique pour le reste du developpement, car celui-ci est souvent negligeable.
Les entrees du systemes u\, u-i et u^ sont des couples de commande appliques le long des axes du referentiel attache au corps et sont generes par des roues a reaction. Le vecteur de commande u est exprime par l'equation suivante
u = aiTi + a2r2 + a3r3, (3.62)
u = A T , (3.63)
A = [ a i a2a3] ,
ou a, est une matrice colonne unitaire qui represente les coordonnees de l'axe de rotation de la roue i exprimees dans le referentiel attache au corps et r, represente le couple applique par la roue i.
Le couple rc qui doit etre commande aux roues a reaction pour obtenir un uc desire est
determine par la relation suivante
rc = A - V (3.64)
Lorsqu'un couple r, associe a une roue a reaction est plus grand que celui que la roue peut fournir, la roue va saturer et la direction du vecteur de commande r ne sera plus la meme que le vecteur commande rc. Ceci aura pour consequence que le satellite ne
tournera pas autour de l'eigenaxis. II faut done s'assurer que le vecteur de commande ait la meme direction que le vecteur commande pour que le satellite s'oriente dans le bon
sens. Pour ce faire, il faut que l'amplitude du vecteur commande TC diminue lorsqu'une
de ses composantes depassent le couple maximal que la roue i peut generer. Le nouveau couple r qui est obtenu est le couple de commande qui va etre fourni aux roues a reaction.
Exprime mathematiquement, il y a une des composantes i du vecteur commande rc qui
depassent la capacite de la roue i lorsque
Tel | | Tc2 | | Tc 3
max > 1, (3.65)
n T2 r3
ou TCi est le couple commande a la roue i et fj est le couple maximal que la roue i peut fournir.
La formule 3.65 peut aussi etre exprimee de la facon suivante
a(q,u;) - U T r ^ U = max \ ( T r J ; |> 1, (3.66)
ou
T = diag(l/fu l/r2, l / r3) . (3.67)
Lorsque la condition 3.66 est satisfaite, cela veut dire qu'une roue a reaction va saturer et il faut done diviser le vecteur commande rc par er(q, UJ) > 1 pour que celui-ci conserve sa
direction. Ce nouveau vecteur va done etre le vecteur de commande.
La fonction de saturation donnant le vecteur de couple applique a partir du vecteur com-mande est done donnee par la relation suivante
r = sata(rc) = KH ' - (3.68)
rc/cr(q,u;) : a(q,u;) > 1
Le vecteur de commande qui est applique au systeme est done donne par la formule suivante
u = AT,
= Asata(Tc), = A s a i( T( A_ 1uc) ,
La relation suivante est finalement obtenue pour le signal de commande
u = -sata ( K J s a t (Pqe) + C w ) . (3.70)
II est ensuite prouve, que meme en presence de saturation, le satellite tournera autour de l'eigenaxis.
3.2.2 Controleur de type PID par retour de quaternions
Lorsque l'erreur d'attitude est grande et que la vitesse angulaire du satellite et le signal de commande doivent etre satures, la loi de commande 3.70 produit un regime transitoire comportant d'importants depassements maximums. Ceux-ci ralentissent la stabilisation du satellite, car ils mettent beaucoup de temps avant de s'attenuer. La loi de commande precedente [WIE et LU, 1995] a done ete amelioree dans le but d'augmenter la rapi-dite d'execution des mouvements grand-angles de satellite en diminuant les depassements maximum [WIE et coll., 2002]. Cette nouvelle loi de commande doit reduire le temps de stabilisation du satellite et done ameliorer le regime transitoire entre deux rotations. De cette fagon, le satellite pourra rapidement effectuer plusieurs pointages successifs vers des cibles terrestres differentes.
Le satellite est represente a l'aide des equations 3.49 et 3.50 afm d'appliquer une loi de commande de type cascade avec saturation.
La loi de commande permettant au satellite de ne pas depasser la vitesse angulaire mesu-rable par les gyrometres tout en tournant autour de l'eigenaxis est donnee par la formule suivante
u = - J 2k satLi ( qe + - J qe dt\ + cu> , (3.71)
ou J represente la matrice d'inertie qui n'est pas necessairement diagonale, UJ est le vecteur des vitesses angulaires du satellite, qe est le quaternion d'erreur, T represente la constante
La fonction de saturation est definie comme suit
satLi(x) =
satL1(xi)
satL2(x2)
satLn(xn) ou les limites de saturation sont determinee par
(3.72)
Li =
2k U)j (3.73)
et I ^>i \max est la vitesse maximale de l'axe i qu'il est possible de mesurer a l'aide des gyrometres.
Contrairement a la loi de commande utilisee precedemment [WIE et LU, 1995], WIE et coll. ont rajoute un integrateur pour ameliorer le regime permanent. Le signal de com-mande 3.71 represente done un PID.
Apres avoir tenu compte des contraintes reliees aux gyrometres, les auteurs continuent la conception en tenant compte de la saturation des roues a reaction.
Suivant le meme raisonnement que la loi de commande precedente, le vecteur de commande donnant une rotation autour de l'eigenaxis est donne par l'expression suivante
u = sata (-3 2k satu ( qe + - / qe dt) + CUJ J , (3.74)
ou la fonction de saturation safer est donnee par la formule 3.68.
Pour obtenir un regime transitoire rapide pour de grands angles, la limite de saturation pour la fonction satu doit etre ajustee de la fagon suivante
Li = ^Tmin { V 2 ai \Qi\,\Ui \max
}•
(3.75) ou Oj = Ti/Ju represente l'acceleration de commande maximale par rapport a l'axe i et| u>i | est la vitesse angulaire maximale de l'axe i qui peut etre mesuree par les gyrometres.
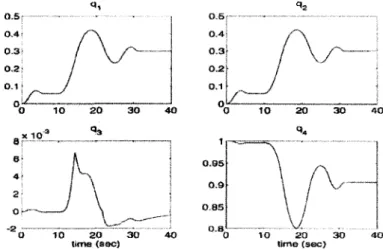
Les graphiques de la figure 3.7 representent les reponses du satellite pour deux manoeuvres grand-angles successives. La serie de graphiques du haut represente le controleur avec le
limiteur fixe represents par l'equation 3.73 et la serie de graphiques du bas represente le controleur avec le limiteur variable represente par l'equation 3.75. A partir de ces gra-phiques, il est facile de conclure que le satellite a un meilleur regime transitoire avec le limiteur variable, car les reponses n'ont pas de depassements maximums et le satellite stabilise tres rapidement. Se stabilisant plus rapidement lors des manoeuvres de reorien-tation, le satellite peut pointer vers plusieurs cibles differentes dans un intervalle de temps donne.
10 20 30 time (sec)
20 30 lime (sec)
FIg.3 Time histories of sp;ui-rr;itt Httituitequaternio»s(constant~gain controller without variable iintiter /.).
0.<t 0.3 0 . 2 0.1 o> 0.4. 0 . 3 0 . 2 0.1 o. I Z _ 2 , -i.s! 1 j O.SJ 0 " lO 20
time <soc) io ao time (&&c)
Fig. 4 Time histories of spacecraft attitude quaternions (eonstii nt-gain controller witli variable liiuiter JLh
Figure 3.7 Resultats du retour de quaternions de type PID, (extrait de [Wie et coll., 2002]).
3.2.3 Commande predictive
Toutes les techniques de commande utilisees pour les manoeuvres grand-angles de satellite qui ont ete presentees jusqu'ici tenaient compte de l'erreur passee entre la sortie et la reference. II serait interessant d'utiliser une technique de commande de satellite qui tient compte des erreurs futures estimees au lieu des erreurs passees. Ceci est un grand avantage lorsque revolution de la trajectoire de reference est connue a priori, car le systeme de commande peut reagir avant meme que la trajectoire n'ait ete modifiee. Comme discute dans l'introduction, ce type de commande existe et est appele commande predictive.
La majorite des applications de la commande predictive ont ete faites dans l'industrie ma-nufacturiere telle que les raffineries, l'industrie petrochimique et les pates et papiers [QIN et BADGWELL, 2000]. II y a cependant, depuis quelques annees, un interet grandissant pour l'utilisation de la commande predictive dans le domaine de l'aerospatiale. Avant de presenter les appplications de la commande predictive au domaine de l'aerospatiale, les differentes techniques de commande non lineaire predictive continue vont etre presentees au prochain chapitre. L'auteur de ce document conseille fortement au lecteur de lire l'an-nexe C avant d'entreprendre la lecture du prochain chapitre.
C o m m a n d e predictive et applications a
I'aerospatiale
Le commande predictive trouve son origine dans l'industrie manufacturiere ou il y a des precedes complexes sujets a diverses contraintes. Le Model Predictive Control (MPC) est une vaste famille de systemes de commande qui different entre eux seulement par le type de m o d e r a t i o n et la fonction de cout a minimiser [CAMACHO et BORDONS, 2004]. La fonction de cout est generalement une fonction quadratique qui contient l'erreur de prediction et parfois l'effort de commande. Dans le cas d'un suiveur d'etats, l'idee de base de la commande predictive est de calculer a chaque temps t une entree future optimale
u(t + T) en prenant le vecteur d'etat x(i) comme vecteur de condition initiale de la
trajectoire x(£ + T) pour se rapprocher de la trajectoire future desiree w(t + T). On reevalue done, a chaque temps t, la valeur de l'entree u(t + T) necessaire pour obtenir la reference desiree w(t + T). Cette methode est aussi appelee receding-horizon control ou
moving-horizon control.
Dans sa forme originale, le commande predictive non lineaire requiert une optimisation non lineaire qui doit se faire en temps reel. Cette optimisation est souvent non convexe et requiert beaucoup de calcul. Cette situation n'est pas souhaitable pour une application en temps reel comme la commande d'attitude de satellite, car les processeurs dedies a I'aerospatiale sont moins puissants que les processeurs industriels.
II existe differents types de lois de commande predictive. La commande MPC peut-etre lineaire ou non lineaire, discrete ou continue, representee par une fonction de transfert ou des variable d'etats, avec ou sans contraintes. La methode de commande non lineaire predictive la plus utilisee en aerospatiale est la commande continue qui sera maintenant discutee en detail.
![Figure 2.1 Corps rigide, (extrait de [HUGHES, p.57]).](https://thumb-eu.123doks.com/thumbv2/123doknet/2856833.71106/27.924.173.783.259.783/figure-corps-rigide-extrait-hughes-p.webp)
![Figure 3.1 Resultats des rotations pour le retour de quaternions, (extrait de [WIE et coll., 1989])](https://thumb-eu.123doks.com/thumbv2/123doknet/2856833.71106/41.934.201.777.137.533/figure-resultats-rotations-retour-quaternions-extrait-wie-coll.webp)