UNIVERSITE DE
SHERBROOKE
Faculte de genie
Departement de genie mecanique
DEVELOPPEMENT D'UNE PEDALE
DYNAMOMETRIQUE POUR VELO
Projet de maitrise es sciences appliquees
Speciality : genie mecanique
Patrick BARRIAULT
1*1
Library and
Archives Canada
Published Heritage
Branch
395 Wellington Street Ottawa ON K1A0N4 CanadaBibliotheque et
Archives Canada
Direction du
Patrimoine de I'edition
395, rue Wellington Ottawa ON K1A0N4 CanadaYour file Votre reference ISBN: 978-0-494-49452-3 Our file Notre reference ISBN: 978-0-494-49452-3
NOTICE:
The author has granted a
non-exclusive license allowing Library
and Archives Canada to reproduce,
publish, archive, preserve, conserve,
communicate to the public by
telecommunication or on the Internet,
loan, distribute and sell theses
worldwide, for commercial or
non-commercial purposes, in microform,
paper, electronic and/or any other
formats.
AVIS:
L'auteur a accorde une licence non exclusive
permettant a la Bibliotheque et Archives
Canada de reproduire, publier, archiver,
sauvegarder, conserver, transmettre au public
par telecommunication ou par Plntemet, prefer,
distribuer et vendre des theses partout dans
le monde, a des fins commerciales ou autres,
sur support microforme, papier, electronique
et/ou autres formats.
The author retains copyright
ownership and moral rights in
this thesis. Neither the thesis
nor substantial extracts from it
may be printed or otherwise
reproduced without the author's
permission.
L'auteur conserve la propriete du droit d'auteur
et des droits moraux qui protege cette these.
Ni la these ni des extraits substantiels de
celle-ci ne doivent etre imprimes ou autrement
reproduits sans son autorisation.
In compliance with the Canadian
Privacy Act some supporting
forms may have been removed
from this thesis.
Conformement a la loi canadienne
sur la protection de la vie privee,
quelques formulaires secondaires
ont ete enleves de cette these.
While these forms may be included
in the document page count,
their removal does not represent
any loss of content from the
thesis.
Bien que ces formulaires
aient inclus dans la pagination,
il n'y aura aucun contenu manquant.
DEVELOPPEMENT D'UNE PEDALE DYNAMOMETRIQUE POUR VELO
Ce memoire de maitrise a ete effectue a l'Universite de Sherbrooke pour VelUS, le groupe de R&D sur le velo. II presente en details le cheminement suivi pour la realisation d'une pedale dynamometrique interchangeable et compacte pour velo, de la problematique jusqu'a sa mise en service. La pedale dynamometrique est compatible avec la plupart des pedaliers de velo et avec les chaussures de pedales de piste Shimano PD-6400 et de route Look CX-7. Elle mesure
in situ les forces de locomotion developpees par le cycliste sur elle-meme et aussi sa propre
position angulaire par rapport au pedalier. Le memoire illustre d'abord le concept mecanique permettant d'effectuer les mesures: un corps d'epreuve instrumente de jauges extensometriques et d'un encodeur optique. II s'attarde ensuite a la conception du capteur, qui consiste a dimensionner le corps d'epreuve pour satisfaire toutes les exigences : le positionnement du pied, la resistance mecanique, la sensibilite, la masse et l'encombrement; dans ce chapitre, on developpe une methode de travail pour assurer un bon fonctionnement du capteur et pour maximiser sa sensibilite. Par la suite, le memoire presente 1'instrumentation, Petalonnage ainsi que des mesures effectuees par la pedale dynamometrique.
Velo, force, mesure, pedale, capteur, pedale dynamometrique, pedalage, puissance, efficacite, jauge extensometrique, jauge dynamometrique, encodeur optique, sensibilite, velo de piste, velo de route, Shimano PD-6400, Look CX-7, VelUS.
Remerciements
J'aimerais remercier particulierement Yvan Champoux et Jean-Marc Drouet, tous deux professeurs au departement de genie mecanique de l'Universite de Sherbrooke et cotuteurs de ce projet de maitrise. Yvan et Jean-Marc m'ont appuye tout au long de mon cheminement depuis les debuts du projet. lis ont partage plusieurs connaissances avec moi et ont ete tres genereux de leur temps. Je me considere sincerement choye d'avoir travaille avecvous. Merci encore.
Merci a Christian Clavet, technicien de laboratoire au GAUS de l'Universite de Sherbrooke, pour 1'installation et le cablage des jauges extensometriques.
Merci a Gabriel Laperle, technicien au S.M.S. et a toute Pequipe du S.M.S. de l'Universite de Sherbrooke pour l'usinage de la pedale dynamometrique.
Merci a Marc Rousseau, technicien en electrotechnique au departement de genie mecanique de l'Universite de Sherbrooke, pour son soutien technique et son travail accompli relativement a l'encodeur et son electronique.
Merci a Magella Tremblay, responsable du laboratoire des materiaux du departement de genie mecanique de l'Universite de Sherbrooke, pour son soutien technique et son temps investi pour des essais sur les materiaux de la pedale.
Merci a Annie Barriault, enseignante au Cegep de Jonquiere, pour l'usinage de pieces pour une &ude de faisabilite en d6but de projet.
Finalement, merci a Daniel Pare, bio-mecanicien et etudiant au doctorat en genie mecanique a l'Universite de Sherbrooke, pour ses judicieux conseils et pour avoir partage de nombreuses connaissances dans le domaine du velo.
Table des matieres
1 Introduction 1 1.1 Etat des connaissances 2
1.1.1 Capteurs de forces ajauges extensometriques 3
1.1.2 Pedales automatiques traditionnelles 4
1.1.3 Pedale dynamometrique 5 1.2 Definition du besoin et objectifs 7
2 Presentation du concept 9 2.1 Roulement 10 2.2 Plateformes 11 2.3 Mesures 13
2.3.1 Mesure des forces 13 2.3.2 Mesure de la position angulaire 14
3 Conception de la pedale dynamometrique 15
3.1 Criteres de conception 15 3.1.1 Position du pied 15 3.1.2 R6sistance mecanique 16
3.1.3 Sensibilite 18 3.1.4 Masse, encombrement, compacite 18
3.2 Materiaux 19 3.2.1 Acier inoxydable 17-4 PH 19
3.2.2 Aluminium 7075-T651 20 3.3 Dimensionnement du corps d'epreuve 21
3.3.1 M&hode de dimensionnement 21 3.3.2 Analyse par elements finis "A" 24 3.3.3 Analyse par elements finis "B" 25 3.3.4 Analyse par elements finis "C" 26
3.3.5 Conclusion 27 3.3.6 Raideur et frequence naturelle du corps d'epreuve 28
4 Instrumentation 30 4,1 Mesure des forces 30
Table des matieres (suite)
4.1.1 Strategie de positionnement et branchement des jauges extensometriques .. 30
4.1.2 Instrumentation du corps d'epreuve 33
4.1.3 Sensibilite theorique 37 4.2 Mesure de la position angulaire 38
4.2.1 Position de l'encodeur optique 39
4.2.2 L'encodeur 39 4.2.3 Module electronique de l'encodeur 41
5 Etalonnage 43 5.1 Etalonnage des pontsde jauges 43
5.1.1 Outils, accessoires et montages 43
5.1.2 Resultats 46 5.2 Etalonnage de la position angulaire 50
5.2.1 Etalonnage statique 50 5.2.2 Etalonnage dynamique 50 6 Resultats 53 7 Discussion 54 8 Conclusion 60 Annexe I 61 Bibliographie 63
Liste des figures
Figure 1.1 - Composantes de chargement et systeme d'axe sur une pedale automatique de
velo 2 Figure 1.2 -Pedales automatiques commerciales 5
Figure 1.3 -Pedale dynamometrique de Hull et Davis (1981) [15] 6
Figure 2.1 - Vue en coupe de la pedale dynamometrique 10 Figure 2.2 - Montage des roulements a billes sur la plupart des pedales traditionnelles... 10
Figure 2.3 - Montage du roulement a billes sur la pedale dynamometrique 11
Liste des figures (suite)
Figure 2.5 - P&lale Look CX-7 12 Figure 2.6 - Pedale dynamometrique en mode Shimano PD-6400 12
Figure 2.7 - Pedale dynamometrique en mode Look CX-7. 13 Figure 2.8 - Allongement du bout de l'arbre qui accueille deux vis M6 a tete fraisees 13
Figure 2.9 - Jauges extensometriques sur la pedale dynamometrique 14 Figure 2.10 - Composantes servant a la mesure de la position angulaire de la pedale
dynamometrique 14 Figure 3.1 - Ecartement et hauteur de la pedale 16
Figure 3.2 - Les deux cas de chargement critiques sur la pedale dynamometrique 18
Figure 3.3 - Geometrie de l'arbre 21 Figure 3.4 - Dimensions de l'arbre (en mm) 22
Figure 3.5 - Analyse par el6ments finis "A" 24 Figure 3.6 - Analyse par elements finis "B" 25 Figure 3.7 - Analyse par elements finis "C" 26 Figure 3.8 - Trace de la deformation s selon £ (reT. fig. 3.8) sur la ligne d'inspection
superieure de l'analyse "C" 27 Figure 3.9 - Dimensions finales de l'arbre (en mm) 27
Figure 3.10 - Force selon -z appliqu^e sur le corps d'epreuve vis-a-vis le centre du pied. 28 Figure 3.11 - Corps d'epreuve avec une masse m qui represente la masse du cycliste 28 Figure 4.1 - Positionnement des jauges extensometriques pour la mesure d'une force sur
une poutre en porte-a-faux (a) avec le schema de branchement (b) 31 Figure 4.2 - Deformation des jauges pour les six composantes de chargement 32
Figure 4.3 - Comparaison AEF - RDM de sy selon £ (ref. fig. 3.8) sur la ligne
d'inspection superieure de l'analyse par elements finis "C" 34
Figure 4.4 Ecart relatif [(RDM-AEF)/AEF] de sy selon £ sur la ligne d'inspection
superieure de l'analyse par elements finis "C" 35 Figure 4.5 - Positionnement des jauges sur le corps d'epreuve (a) et dimensions principales
de la jauge CEA-06-062UW-350 (b) 36 Figure 4.6 - Schema des huit jauges sur le corps d'epreuve 36
Figure 4.7 - Angle cp mesur6 par l'encodeur de la pedale dynamometrique 38
Liste des figures (suite)
Figure 4.9 - Jeu dans Paccouplement de la tige pour encodeur et la vis de serrage 39
Figure4.10-Dimensions generates del'encodeur 40 Figure 4.11 - Fiche technique de l'encodeur CUI-NSB-256-2CA-105-030 40
Figure 4.12 -Traitement des signaux provenant de l'encodeur 41 Figure 5.1 - Etalonnage des ponts de jauges de la pedale dynamometrique 43
Figure 5.2 - Barre en « H » pour l'etalonnage 44
Figure 5.3 - Etalonnage de Fx 44
Figure 5.4 - Etalonnage de Fz 44
Figure 5.5 - Etalonnage de Cx 45
Figure 5.6 - Etalonnage de Cz. 45
Figure 5.7 - Bloc de bois robuste pour l'etalonnage de Fx et Fz 45
Figure 5.8 - Riponses des ponts de la pedale dynamometrique pour un chargement Fx.... 46
Figure 5.9 - Riponses des ponts de la pedale dynamometrique pour un chargement Fz.... 46
Figure 5.10- Reponses des ponts de la pedale dynamometrique pour un chargement Cx.. 47
Figure 5 . 1 1 - Reponses des ponts de la pedale dynamometrique pour un chargement Cz.. 47
Figure 5.12- Tension de sortie de l'encodeur et son electronique en fonction de la position
angulaire de la pedale 50 Figure 5.13 - Montage pour l'etalonnage dynamique de l'encodeur et son electronique... 51
Figure 5.14 - Tension de sortie de l'encodeur et son electronique pour une vitesse de
rotation de 90 RPM dans le sens horaire 51 Figure 5.15 - Tension de sortie de l'encodeur et son electronique pour une vitesse de
rotation de 90 RPM dans le sens antihoraire 52 Figure 5.16 - Tension de sortie de l'encodeur et son electronique pour une vitesse de
rotation de 120 RPM dans le sens horaire 52
Figure A.1 - Fx, Fz et cp mesures par la pedale dynamometrique en « regime permanent».
61
Liste des tableaux
Tableau 1.1 - Tableau recapitulatif des donnees pubises sur les pedales dynamometriques : composantes de chargement mesurees et conditions de pedalage 7 Tableau 3.1 - Comparaison des ecartements et des hauteurs entre la pedale
dynamometrique et les pedales Shimano PD-6400 et Look CX-7. 16 Tableau 3.2 - Chargements minimaux et maximaux sur une pedale de velo de route
recueillis avec la revue de la litteYature 17 Tableau 3.3 - Chargements minimaux et maximaux estimes sur une pedale de velo de
piste 17 Tableau 3.4 - Proprietes m&aniques de l'acier inoxydable 17-4 PH avant et apres un
vieillissement artificiel de 1 heure a 485 °C 19 Tableau 3.5 - Proprietes mecaniques l'alliage d'aluminium 7075-T651 20
Tableau 3.6 - Dimensions variables de Parbre et leur influence sur les criteres de
conception 22 Tableau 4.1 - Zones de sensibilite lineaire sur la ligne d'inspection superieure de Parbre
pour Fy, Fz et C, 35
Tableau 4.2 - Valeurs maximales et resolutions pour la mesure de la position angulaire cp. 42
Tableau 5.1 - Matrice de sensibilite [mV/V/N] pour les efforts mesurables Fx et Fz 47
Tableau 5.2 - Matrice de sensibilite" [mV/V/N] pour les efforts perturbateurs Fy, Cx, Cy, et
Cz 48
Tableau 5.3 - Matrice de sensibilite [mV/V/N] finale pour la mesure de Fx et Fz 48
Tableau 5.4 - Erreurs sur Fx et sur F2 par couplage des composantes Fx, Fy, Fz, Cx et Cz. 49
1 Introduction
Le groupe de recherche VelUS a decide de developper, pour sa propre utilisation, une pedale capable de mesurer les forces qui y sont transmises par le pied d'un cycliste, d'ou le nom de « pddale dynamometrique ».
Les blessures au genou comme les bursites et les tendinites sont des problemes frequents chez les cyclistes de tous les niveaux (Ruby et Hull, 1993). On croit qu'il existe un lien direct entre ces blessures et le positionnement des pedales. Certaines pedales commerciales offrent des ajustements fins et multiples sans toutefois offrir un moyen efficace et approuve pour trouver l'ajustement ideal pour chaque individu. II est plausible de croire que pour la majorite des gens, il existe une position ou une combinaison d'ajustements adaptes a la physionomie de l'individu pour laquelle les faux mouvements et les efforts indesirables dans les muscles et les articulations sont minimises.
Aussi, des donnees telles que la puissance, l'efficacite et le patron des forces sur les pedales lors du pedalage sont des informations extremement interessantes pour le domaine de Pentrainement cycliste de haut niveau.
Le present memoire presente tous les aspects du developpement de la pedale dynamometrique en passant par sa conception jusqu'a la prise de mesure en situation reelle de pedalage.
La pedale dynamometrique mesure in situ les forces de locomotion de meme que Tangle de la pedale par rapport a la manivelle. Elle est compatible avec tous les velos standards : elle se visse a la manivelle du velo au meme litre qu'une pedale commerciale. Deux plateformes servant a accueillir la chaussure du cycliste sont interchangeables : les systemes de fixation de deux pedales commerciales (une pedale de route et une pedale de piste) ont ete reproduits. De plus, la masse de la pedale dynamometrique et ses dimensions sont semblables a celles des pedales commerciales.
1.1 Etat des connaissances
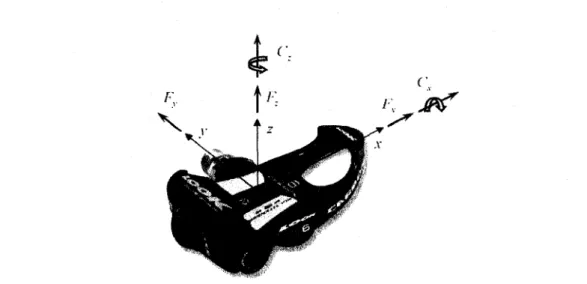
Lorsqu'on parle des chargements sur la pedale, on parle des forces et des couples transmis a la pedale par le pied du cycliste. Le systeme d'axes le plus frequemment utilise dans le domaine du velo ainsi que les composantes de force et de couple sont illustres a la figure 1.1.
Figure 1.1 - Composantes de chargement et systeme d'axe sur une pedale automatique de veto.
L'axe y passe par le centre de rotation de la pedale et l'origine O est placee (selon y) au centre de la plateforme de la pedale. L'axe x pointe vers Pavant de la pedale et l'axe z est
normal a la surface d'appui sur le dessus de la pedale. Les forces Fx et Fz sont appelees
« forces de locomotion » puisqu'elles engendrent le mouvement de rotation du pedalier.
La force F et les couples Cx et Cz sont trois composantes de chargement non utiles pour
la locomotion. Le couple selon l'axe y n'est habituellement pas consid^re puisque la pedale est libre de tourner autour de cet axe.
Actuellement, il n'existe aucune pedale commerciale capable de mesurer les composantes de chargement. Le chercheur doit done developper son propre materiel. Dans le passe, ceci a fait l'objet de plusieurs etudes scientifiques (voir la section 1.1.3). La majorite des pedales dynamometriques developpees au fil du temps ont utilise des jauges extensometriques en utilisant la deformation de la pedale pour trouver les chargements. D'autres ont utilise des Elements piezo-electriques places entre la chaussure et la pedale.
Dans le cadre de ce projet, des jauges extensometriques sont utilisees pour effectuer les mesures. Cette technologie est facilement accessible et le savoir-faire est deja acquis par Pequipe V61US. Les jauges sont de petits capteurs faciles a integrer sur une structure. Elles permettent egalement la mesure de charges statiques contrairement aux elements piezo-electriques.
1.1.1 Capteurs de forces a jauges extensometriques
Puisque le principe de mesure par jauges extensometriques est utilise pour determiner les chargements sur la pedale, cette section releve certains aspects a considerer lors de la conception d'un capteur de forces a jauges extensometriques. Les elements presented dans la presente section sont tires de la reference [2].
Tout d'abord, la frequence naturelle du capteur est un parametre excessivement important. Si les frequences d'excitation sont pres de la frequence naturelle, les mesures seront faussees par le comportement dynamique du capteur. Les chargements associes au pedalage mesures sur le velo sont en basses frequences, typiquement entre 0 - 2 0 Hz, ce qui correspond a une frequence de pedalage entre 0 et 120 RPM. Le capteur doit done posseder une frequence naturelle la plus elevee possible. II est done de mise d'utiliser un materiau rigide sans masse excessive. Une rigidite elevee permet egalement de minimiser la non-lin^arite du signal occasionnee par le deplacement du point d'application de la charge lorsque le capteur se deforme. D'un autre c6te, la sensibility de la jauge est inversement proportionnelle a la rigidite de la structure. II y a done un compromis a faire entre la rigidite" et la sensibilite.
Le niveau de deformation du capteur a l'endroit de l'installation de la jauge doit se situer dans la plage d'utilisation de la jauge. Ceci fait intervenir plusieurs parametres comme les grandeurs des composantes de chargement, les dimensions geometriques, ainsi que le materiau utilise. Afin d'exploiter au maximum la plage d'utilisation de la jauge, le signal de la jauge doit correspondre a la deformation admissible de la jauge au cas de chargement maximal du capteur. Dans certains cas, il est possible de concevoir le capteur de maniere a
obtenir une deformation uniforme dans la region de la jauge. La deformation peut ainsi etre maximale partout sur la jauge.
La selectivity de la reponse est egalement un aspect important a considerer lors de la conception d'un capteur. Un capteur de forces doit avoir autant de signaux de sortie que de composantes de forces et de couples a mesurer et, idealement, chacune de ces sorties est sensible a une seule de ces composantes.
L'hysteresis est aussi a considerer. La conception d'un capteur fabrique d'une seule piece peut considerablement diminuer l'hysteresis et du meme coup ameliorer la repetitivite et la linearite du systeme. Les joints de toutes sortes entrainent systematiquement de petits mouvements et du frottement qui nuisent au bon fonctionnement du capteur.
La dilatation thermique du materiau et de la jauge occasionnee par des changements de temperature peut fausser les lectures. Lorsqu'il existe des gradients de temperature importants sur le capteur, une compensation thermique peut s'averer essentielle. Les jauges sont des sources de chaleur et peuvent provoquer des derives thermiques provoquant une derive de la lecture. Une disposition symetrique des jauges sur un capteur symetrique peut prevenir cet effet.
1.1.2 Pedales automatiques traditionnelles
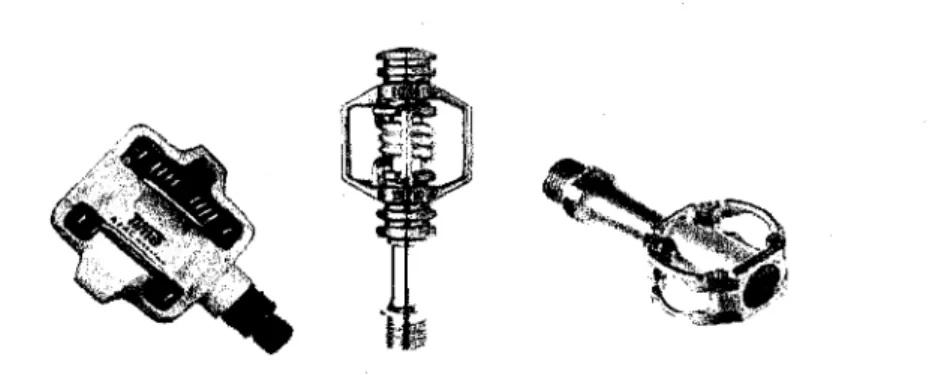
La pedale automatique est apparue dans les annees 1980. Elle constitue la plus grande evolution technologique du velo des dernieres decennies puisqu'elle permet d'ameliorer la performance du pedalage de maniere tres significative. La fonction d'une pedale automatique est de faire un lien rigide entre la chaussure du cycliste et la manivelle du velo, tout en permettant la transmission de la puissance. La figure 1.2 presente trois modeles de pedales automatiques commerciales traditionnelles. Chaque p6dale est constituee d'une attache, souvent concue avec un systeme a ressorts. Cette attache se fixe sur la chaussure et est libre de pivoter autour de l'axe y. L'autre extremite est filetee et permet le lien sur la manivelle.
Figure 1.2 - Pedales automatiques commerciales. De gauche a droite, les modeles sont: TimeATAC
Alloy - Crank Brothers Egg Beater S - Bebop Stainless
1.1.3 Pedale dynamometrique
L'interet pour la mesure des chargements appliques aux pedales d'un velo remonte a plus d'un siecle. Voici un bref historique a ce sujet suivi de quelques valeurs de chargement obtenues avec differentes pedales dynamometriques.
Historique
Un des premiers chercheurs a s'interesser a la mesure des forces transmises aux pedales d'un velo est Sharp (1896) [21]. II utilisait des ressorts comme capteurs de deplacement. En 1968, Hoes et coll. [14] sont parvenus a determiner les forces de reaction aux pedales en instrumentant a la fois la pedale et la manivelle avec des jauges extensometriques. Par la suite, Dal Monte et coll. (1973) [8] ainsi que Soden et coll. (1979) [22] l'ont fait en utilisant respectivement des capteurs de deplacement lineaire et des jauges de deformation sur la pedale. Ces etudes s'interessaient aux forces de locomotion.
Les premiers qui mirent au point une pedale dynamometrique pouvant mesurer six composantes de chargement (trois forces et trois couples) sont Hull et Davis (1981) [15], en utilisant une plateforme de force fixee sur une pedale (figure 1.3). La plateforme de force etait composee de quatre anneaux de deformation hexagonaux instrumentes de jauges extensometriques. Ce principe a ete repris par Newmiller et Hull (1988) [17] et optimise pour la lecture des forces de locomotion. Cette plateforme etait composee d'un seul anneau de deformation. Plus recemment, Boyd et coll. (1996) [3] ont egalement mesure
les six composantes de chargement en utilisant une plateforme de force. Celle-ci etait
composee de Shear Panel Elements1 instrumentes de jauges extensometriques.
Figure 1.3 - P6dale dynamometrique de Hull et Davis (1981) [IS].
D'autres chercheurs ont utilise des capteurs piezo-electriques. Le montage de Ericson et
coll. (1984) [13] a permis la mesure des trois composantes de force (3D), tandis que celui
de Broker et Gregor, (1990) [5] a permis la mesure des trois memes composantes en plus de celle d'un couple.
Plus recemment, Alvarez et Viniolas (1996) [1], Rowe et coll. (1998) [19] ainsi que Reiser
et coll. (2003) [18] ont mis au point des pedales instrumentees pour lesquelles des jauges
de deformation 6taient placees sur l'axe de la pedale. Ces pedales ont permis de mesurer les forces de locomotion. Contrairement aux pedales instrumentees proposees anteYieurement, ces pedales possedent une taille et une masse similaires a celles des pedales automatiques traditionnelles.
Tableau recapitulatif de 1'historique
Le tableau 1.1 resume 1'historique des publications consultees sur les pedales dynamometriques et dedi6es a la lecture des chargements sur les pedales d'un v61o. On y presente les types de chargements mesures ainsi que les conditions de pedalage lors des essais.
Tableau 1.1 - Tableau recapitulatif des donnees publiees sur les pedales dynamometriques: composantes de chargement mesurees et conditions de pedalage.
Hoes etcoll. (1968) Dal Monte et coll. (1973) Sodenetcoll. (1979) Hull et Davis (1981) Ericson et coll. (1984) Newmilleret Hull (1988) Broker et Gregor (1990) Boyd et coll. (1996) Alvarez et Viniolas (1996) Roweetcoll. (1998) Reiser etcoll. (2003) Composantes mesurees FX,FZ FX,FZ FX,FZ Fxt Fy> *z> ^x> {--y> * - r *y> **z> ^x FX,FZ F F FT C r xi ry> r z> ^~-z F F F C C C * J D * yt •*• zi *^x> ^-y ^ z FX,FZ FX,FZ FX,FZ Conditions de pedalage ergometre ergometre velo de route tapis roulant ergometre tapis roulant ergometre ergometre velo de route velo de montagne velo stationnaire
Dans la plupart des cas, les mesures ont ete effectuees dans des conditions artificielles : sur un ergometre, tapis roulant et velo stationnaire. Seulement quelques-uns ont mesure des donnees in situ : en velo de montagne et en velo de route.
1.2 Definition du besoin et objectifs
Aucune information n'a ete trouv^e au sujet des forces de pedalage in situ pour le cyclisme de piste (dans les velodromes). De plus, il n'existe pas, a la connaissance du groupe VelUS, de pedale dynamometrique commerciale disponible sur le marche. Pour ces raisons, le groupe VelUS a juge pertinent de se munir d'un tel outil pour approfondir et elargir les horizons dans son domaine de recherche. L'objectif principal est done de
concevoir et realiser une pedale capable de mesurer in situ les forces de locomotion Fx et
masse et ses dimensions externes doivent etre similaires a une pedale commerciale. La pedale doit aussi se fixer a la manivelle du velo de la meme facon qu'une pedale commerciale, et aussi accueillir la chaussure du cycliste a la meme position.
Voici les objectifs principaux et secondaires pour la pedale dynamometrique enumeres sous forme de points :
Objectifs principaux
• mesurer Fx et Fz;
• mesurer sa propre position angulaire par rapport a la manivelle; • utilisable in situ sur un velo de piste et sur un velo de route;
Objectifs secondaires
• masse semblable aux pedales commerciales;
• dimensions externes semblable aux pedales commerciales; • positionnement du pied similaire aux pedales commerciales; • compatible avec les manivelles traditionnelles de velo;
2 Presentation du concept
L'objectif est de d£velopper un capteur qui mesure les forces de locomotion appliquees sur la pedale par le cycliste lors du p^dalage. Ce capteur est appele « pedale dynamometrique ». Cette pedale est instrumentee de jauges de deformations et est concue pour accueillir la chaussure et la cale exactement de la meme maniere qu'une pedale traditionnelle.
La premiere exigence qui constitue un defi est au point de vue dimensionnel. La pedale dynamometrique doit positionner le pied du cycliste au meme endroit que sa pedale personnelle le fait. Elle doit aussi se fixer au velo sur le p6dalier au meme titre que les pedales commerciales et offrir le systeme de fixation adequat pour la chaussure. Le cycliste doit se sentir dans son environnement habituel lorsqu'il utilise la pedale dynamometrique done sa masse doit etre similaire a une pedale traditionnelle.
Un autre defi vient du fait que les mesures sont in situ done le systeme d'acquisition doit etre embarqu6 sur le velo ou le cycliste et que la pedale est relive au systeme d'acquisition par des ills electriques. Comme la manivelle tourne, 1'organisation du cablage est au cceur des preoccupations.
Dans ce chapitre, on presente de maniere abregee le concept de la pedale dynamometrique afin que le lecteur ait une bonne idee de son fonctionnement. La figure 2.1 montre une vue en coupe de la version finale de la pedale dynamometrique developpee dans ce projet avec l'identification de ses composantes.
vis de serrage bague de serrage tige pour encodeur arbre / (corps d' epretive) /plateforme .encodeur 'optique ^nniriiAy—J— fcarnd J j a u g e s / . / ]auge dynamo-^axe de ^roulement metriques
pedale * billes
Figure 2.1 - Vue en coupe de la pedale dynamometrique.
soutient/ encodeur'
2.1 Roulement
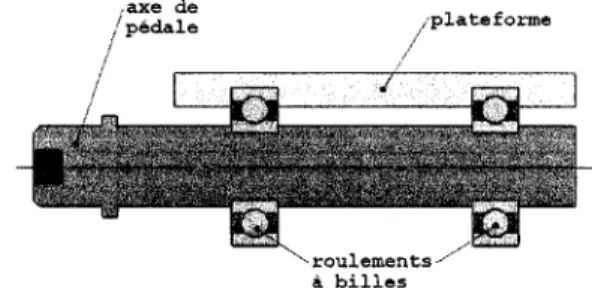
Lors du pedalage, le mouvement de rotation entre la manivelle et la pedale est assure par des roulements a billes ou a aiguilles. Sur des pedales de velo traditionnelles, les roulements sont habituellement disposes de maniere a ce que la plateforme tourne par rapport a l'axe de pedale. Ceci favorise la sollicitation mecanique des roulements en entramant des efforts moderes sur ceux-ci. La figure 2.2 montre un exemple de montage sur une pedale traditionnelle. L'axe est solidaire de la manivelle tandis que la plateforme est solidaire a la chaussure et deux roulements a billes transmettent les efforts entre les deux composantes. ..axe de / p e d a l e / ' /plateforme
a
x roulements •'"' a b i l l e sFigure 2.2 - Montage des roulements a billes sur la plupart des pedales traditionnelles.
Sur la pedale dynamometrique, un arbre, que Ton appelle aussi « corps d'epreuve », est insere entre la plateforme et l'axe (voir figure 2.3). Cet arbre est solidaire a la plateforme et est fixe a l'axe par Pentremise d'un roulement a doubles rangees de billes a contact
angulaire. Ce rouleraent est con9u pour transmettre des forces radiales et axiales et aussi des couples. II est fixe a l'axe et a l'arbre en serrage grace a la vis de serrage et a la bague de serrage. Cet arrangement entraine une plus grande sollicitation sur le roulement comparativement a l'arrangement precedant. En revanche, il expose une zone utile pour l'installation des jauges extensometriques (d'ou le nom de « corps d'epreuve ») et resout la problematique du cablage. bague de s e r r a g e , v i s de ,plateforme / s e r r a g e / 'axe de X> roulement p e d a l e * b i l l e s arbre corps d'epreuve)
Figure 2.3 - Montage du roulement a billes sur la pedale dynamometrique.
2.2 Plateformes
La plateforme de la pedale dynamometrique est fixee a l'arbre et c'est elle qui accueille la chaussure du cycliste.
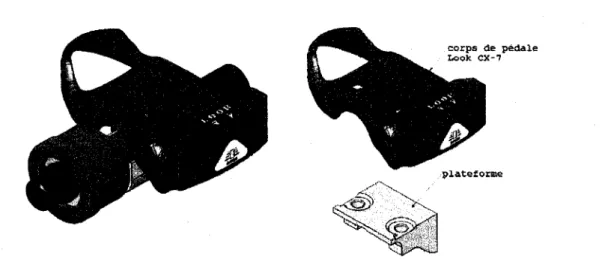
Une des innovations de la pedale dynamometrique developpee dans ce projet est de posseder deux plateformes interchangeables afin d'offrir deux types de fixation. Les fixations imitees sont celles des pedales commerciales Shimano PD-6400 (figure 2.4) et
Figure 2.4 - Pedale Shimano PD-6400. Figure 2.5 - PSdaie Look CX-7.
La figure 2.6 presente la pedale dynamometrique en mode Shimano PD-6400. La plateforme est composed de cinq pieces et dix vis. La plateforme soutient le raidisseur, la griffe et le soutien de cale.
La griffe et le soutien de cale sont des pieces d'origines de la Shimano PD-6400; ce sont elles qui fixent la chaussure. Leur bon positionnement est assure par la plateforme qui sert d'appui et qui fait le lien avec Parbre.
Figure 2.6 - Pidale dynamometrique en mode Shimano PD-6400.
La figure 2.7 presente la p6dale dynamometrique en mode Look CX-7. Cette plateforme est composee de deux pieces et deux vis. Le corps integral de la pedale Look CX-7 se fixe directement a la plateforme et assure done une interface chaussure-pedale identique a Foriginale.
Les difKrentes plateformes de la p6dale dynamometrique sont fixees sur l'arbre grace a des boulons. II y a deux trous chanfreines sur l'allongement au bout de l'arbre (figure 2.8) et des boulons a tete fraises sont visses dans les plateformes.
Figure 2.8 — Allongement du bout de l'arbre qui accueille deux vis M6 a tete fraisees.
2.3 Mesures
Les mesures effectuees par la pedale dynamometrique sont:
les forces de locomotion Fx etF2;
la position angulaire de la plateforme par rapport a la manivelle.
2.3.1 Mesure des forces
La mesure des forces s'effectue grace a huit jauges extensometriques collees sur l'arbre. Les huit jauges sont branchees pour former deux ponts de Wheatstone complets. Chaque
pont est sensible a une force seulement et decouple des cinq autres composantes. La
figure 2.9 montre les quatre jauges qui forment le pont sensible &FZ.
arbre
(corps d'epreuve) \ jauges
extensometriques
jauges
extensometriques
Figure 2.9 - Jauges extensometriques sur la pedale dynamometrique.
2.3.2 Mesure de la position angulaire
La mesure de la position angulaire s'effectue grace a un encodeur optique fixe au bout de l'arbre et li6 a la vis de serrage par une tige de delrin tel que montre a la figure 2.10. L'encodeur mesure Tangle entre le pedalier et l'arbre (selon l'axe y). Cette position angulaire est essentielle pour connattre les efforts sur le pedalier, la puissance du cycliste et son efflcacite puisque les efforts de pedalage sont mesures par rapport a un repere fixe sur la pedale. arbre , (coirps d' epreuve) .encodeur /optique \ v i s de vtige pour
serrage encodeur soutient
encodeur
3 Conception de la pedale dynamometrique
Ce chapitre presente le premier volet de la conception de la pedale dynamometrique. On y presente le parcours qui a permis de determiner et d'optimiser la geometrie du corps d'epreuve.
3.1 Criteres de conception
Quatre criteres de conception relies a la geometrie du corps d'epreuve ont €t€ identifies, pour ensuite Stre caracterises. Voici la liste de ces criteres ainsi que les objectifs qui leur sont rattaches:
• Position du pied : identique ou semblable aux peclales Look CX-7 et Shimano
PD-6400;
• resistance mecanique : resiste aux efforts critiques appliques ; • sensibilite : prevoir une sensibility maximale aux efforts mesures ;
• masse, encombrement et compacite : minimiser la masse de la pedale, eviter d'exposer des parties encombrantes lors de l'utilisation, orienter la conception vers une pedale compacte.
3.1.1 Position du pied
Les dimensions critiques pour Femplacement du pied sont Pecartement et la hauteur. Elles sont identifiees a la figure 3.1. L'ecartement est mesure selon l'axe y, a partir de la manivelle jusqu'au centre de la plateforme. La hauteur est mesur^e selon l'axe z entre le dessus de la plateforme et le centre de l'axe.
ecartement —
/ c e n t r e de
[ / l a plateforme
Figure 3.1 - Ecartement et hauteur de la pedale.
Sur la Shimano PD-6400, Pecartement est de 55 mm et la hauteur est de 15 mm. Pour la
Look CX-7, Pecartement est ajustable entre 50 mm et 60 mm et sa hauteur est de 12 mm.
Le tableau 3.1 montre la comparaison de ces dimensions entre les differentes pedales. Les dimensions de la pedale dynamometrique en mode Shimano PD-6400 sont similaires a celles de la pedale originale. En mode Look CX-7, 1'ecartement de la pedale dynamometrique est semblable a Pecartement maximal de la pedale originale et sa hauteur est legerement plus elevee.
Tableau 3.1 - Comparaison des ecartements et des hauteurs entre ia pedale dynamometrique et les pedales Shimano PD-6400 et Look CX-7.
Ecartement (mm) Hauteur (mm)
Shimano PD-6400 55 15 Look CX-7 50 a 60 (ajustable) 12
P6dale dynamo, en mode Shimano PD-6400 56 15 Pedale dynamo, en mode Look CX-7 60.5 14.5
3.1.2 Resistance mecanique
Afin de s'assurer que la pedale dynamometrique resiste aux efforts qui y sont appliques, la charge maximale a ete" estimee. En considerant les endroits ou cette charge peut etre
appliquee, deux cas critiques de chargement ont ete deflnis. Resister a ces deux cas
Estimation des efforts
La revue de la litterature a identifie dix publications qui presentent des forces et des couples mesures sur des pedales de velos de route lors de differentes conditions de pedalage. Le tableau 3.2 presente les chargements minimaux et maximaux recueillis.
Tableau 3.2 - Chargements minimaux et maximaux sur une p£dale de velo de route recueillis avec la revue de la literature. min. max. F,(N) -300 200
F
ym
-150 30 FZ(N) -1150 50 Cx(N-m) -18 18 C , M -7 2 C,(N-m) -18 18Pour ce qui est du velo de piste, le chargement F2 maximal estime sur la p&lale est de
-3900 N. Cette valeur provient d'un entraineur de Pequipe canadienne de cyclisme sur piste. Le tableau 3.3 montre les chargements minimaux et maximaux estimes pour une pedale de piste.
Tableau 3.3 - Chargements minimaux et maximaux estimls sur une p£dale de v£lo de piste.
min. max. F,(N) s.o. s.o. F,Qi) s.o. s.o. F,W -3900 s.o. Cx(N-m) S.O. s.o. CyQi-m) s.o. s.o. Cz (N-m) s.o. s.o.
Chargement critique de conception
Le critere de conception pour la resistance mecanique de la pedale dynamom&rique est fixe a 4000 N. Celle-ci est basee sur la valeur du tableau 3.3. Les mesures in situ effectuees ulterieurement avec la pedale dynamometrique permettront d'ajuster cette valeur pour une prochaine version de pedale dynamometrique.
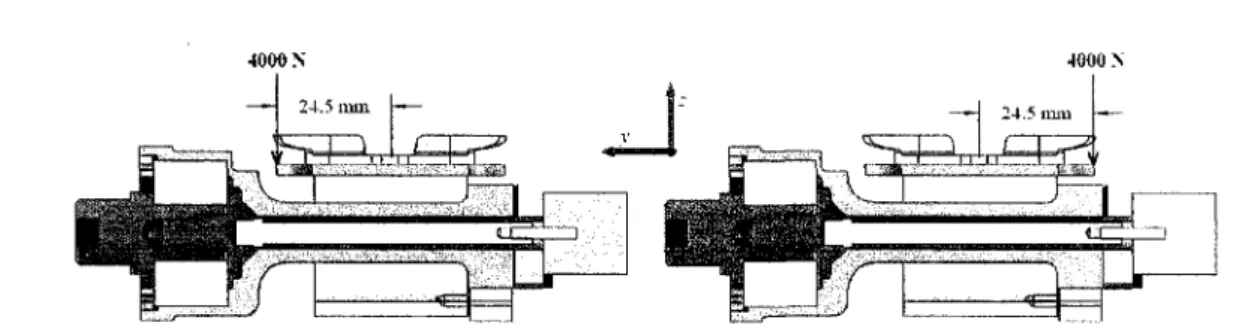
On estime que la charge peut etre appliquee a 24.5 mm de part et d'autre du centre de la plateforme, ce qui occasionne deux cas critiques de chargement qui sont illustres a la figure 3.2.
4000 N 4000 X
Figure 3.2 - Les deux cas de chargement critiques sur la pedale dynamometrique.
3.1.3 Sensibilite
Les sensibilites de la pedale dynamometrique aux efforts Fx et Fz doivent etre les plus
elevees possible. Ces sensibilites dependent directement de la deformation des jauges extensometriques et de leur cablage. Indirectement, elles dependent du positionnement des jauges et du dimensionnement du corps d'epreuve. Les sections 3.3 et 4.1 traitent
respectivement du dimensionnement du corps d'epreuve et de son l'instramentation.
3.1.4 Masse, encombrement, compacite
Dans toutes les etapes de conception, il faut garder en tete l'aspect de la masse de la pedale dynamometrique qui doit s'approcher le plus possible de celle des pedales Shimcmo
PD-6400 et Look CX-7. Les masses de ces deux pedales sont 400 g et 200 g
respectivement.
Tout en positionnant le pied convenablement, la pedale dynamometrique ne doit pas d'encombrer le cycliste dans ces mouvements. Etant donne le grand nombre de composantes et sa taille plutot petite, la pedale doit etre compacte.
3.2 Materiaux
Le materiau choisi pour le corps d'epreuve est l'acier inoxydable 17-4 PH. Pour les deux plateformes, on utilise Palliage d'aluminium 7075-T6.
3.2.1 Acier inoxydable 17-4 PH
L'acier inoxydable 17-4 PH est un acier martensitique durci par precipitation. Le terme anglais est precipitation hardening d'ou « PH ». II est compose de 17 % de chrome et 4 % de nickel.
II represente un choix judicieux lorsqu'on recherche un materiau rigide, resistant, facile a usiner et commun sur le marche. Ce materiau est aussi tres interessant car ses proprietes mecaniques peuvent etre modifiees par un vieillissement artiflciel. Par exemple, on peut faire passer sa durete de 35 HRC a 44 HRC avec un vieillissement d'une heure a 480 °C. L'avantage de cette alternative est que l'on peut usiner une piece plus molle pour ensuite la faire durcir. Ceci permet a une piece usinee d'avoir de tres bonnes proprietes mecaniques. Souvent, les materiaux a tres bonnes proprietes mecaniques sont associes a une mauvaise usinabilite.
Le corps d'epreuve a ete soumis a ce vieillissement artificiel apres son usinage. Des essais de traction sur des eprouvettes ont permis de determiner les nouvelles proprietes mecaniques du materiau. Le tableau 3.4 presente les resultats.
Tableau 3.4 - Proprietes mecaniques de l'acier inoxydable 17-4 PH avant et apres un vieillissement artificiel de 1 heure a 485 °C. 17-4 PH (avant) 17-4 PH (apres) Durete (HRC) 35 44
s,
(MPa) 1000 1250s»
(MPa) 1100 1400 Allongement a la rupture (%) 5 3Le mateYiau vieilli possede des proprieties mecaniques plus interessantes. II est pertinent de
noter que l'augmentation de la limite ultime Su entrame une meilleure limite d'endurance a
la fatigue. Cependant, Fallongement a la rupture qui est un indice de ductility a diminue.
3.2.2 Aluminium 7075-T651
L'alliage d'aluminium 7075 est un choix par excellence lorsqu'on desire combiner resistance et legerete. Puisque les efforts dans les plateformes sont moins importants que dans le corps d'epreuve, les propriety mecaniques de 1'aluminium sont satisfaisantes et on beneficie alors de la faible masse volumique pour alleger la pedale dynamometrique. Le tableau 3.5 presente les proprietes mecaniques de cet aluminium.
Tableau 3.5 - Proprieies mecaniques l'alliage d'aluminium 707S-T651. Sy Stt Allongement a la rupture (MPa) (MPa) (%)
3.3 Dimensionnement du corps d'epreuve
L'arbre est le coeur de la pedale dynamom&rique. II fait le lien entre le pied et le roulement et c'est la composante critique sur laquelle les jauges sont fixers, d'ou son nom de « corps d'epreuve ». Son dimensionnement influence tous les criteres de conception. La figure 3.3 montre et explique sa geometric
Figure 3.3 - Geometrie de l'arbre. A - Filet M34xl pour la bague de serrage; B - Chambre pour
roulement; C Degagement pour mouvement de la cale; D Degagement pour vis de serrage; E
-Degagement pour tige de I'encodeur; F - Zone a section constante pour I'installation des jauges
extensometriques; G - Degagement pour le corps de pedale Look CX-7 (2); H - Trou pour boulon M6 a
t&te fraisee (2); I - Trou filete M3 pour le soutien de I'encodeur (2); J - Trou filetS M3 pour la piece de protection de l'arbre (2).
3.3.1 Methode de dimensionnement
Le dimensionnement a ete fait a partir des criteres de conception (voir section 3.1) et aussi en considerant les dimensions du roulement a billes, de l'axe de pedale, de la bague de serrage et de la vis de serrage.
La figure 3.4 montre les dimensions de l'arbre avec des dimensions fixes (en noir), variables (en vert) et dependantes (en orange). Les dimensions variables sont : les
epaisseurs Tj, T2, T3 et T4, les rayons R et r, l'ecartement E, l'entraxe D et le diametre 0e
E - 55±5
— 22 MAX. h
-D - 15-1.2
Figure 3.4 - Dimensions de l'arbre (en mm).
Le tableau 3.6 regroupe les dimensions variables et leur influence sur les criteres de conception:
Tableau 3.6 - Dimensions variables de l'arbre et leur influence sur les criteres de conception.
T, T2 T3 T4 R r E D position resistance du pied mecanique sensibilite poids
t
Tr
Tt
T i 4 I I T I i I I ILes dimensions variables Ti, T2 et T4 n'ont pas d'influence sur la sensibilite. Elles ont ete determinees a l'aide d'etudes numeriques simples (a partir d'un modele par elements finis) en trouvant une valeur minimale qui permet une resistance mecanique suflisante.
En ce qui concerne l'entraxe D, son jeu n'est pas tres grand et son influence sur les criteres de conception est limited. De plus, sa valeur depend du dimensionnement des plateformes. Sa valeur n'a pas necessite de compromis.
Finalement, les variables R, r, E, et T3 sont les plus critiques. En plus d'influencer la resistance mecanique et le poids, elles influencent la sensibilite. Apres avoir fixe E a sa valeur maximale, trois analyses par elements finis (AEF) ont permis de determiner les
valeurs R, r, 0e et T3 pour maximiser la sensibilite tout en offrant une resistance mecanique
convenable.
L'AEF "A" et l'AEF "B" presentees aux sections 3.3.2 et 3.3.3 portent sur la resistance mecanique. Elles simulent les deux chargements critiques de conception presentes a la section 3.1.2. L'AEF "C" porte sur la sensibilite. Elle mesure la zone lineaire de deformation sur l'arbre, c'est-a-dire la zone ou les deformations sont a l'abri des effets de bouts.
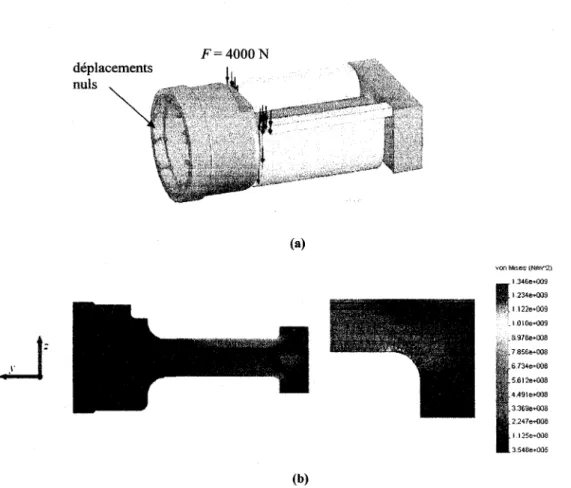
3.3.2 Analyse par elements finis "A"
L'analyse "A" (figure 3.5) simule le premier chargement critique de conception : 4000 N appliques a Pextr&nite interne de la pedale. On examine la contrainte de Von Mises maximale dans le rayon r.
emplacements nuls F = 4 0 0 0 N ymm
i.
(a)J
von Mises (Nftrr^i
R
l .346e*G03 12346*009 I 1226*1309 I.OlOe*iXI9 89766*008 . 7 8566*008 I 6 7346*008 1.5.6126*008 14.4916+008 133686*003 12.2476*008 11.1256*008 13.5486*005 (b)Figure 3.5 - Analyse par elements finis "A". Conditions aux limites : -4000 N appliques selon I'axe z i 1'extremite interne de la pldale (a). Resultats : eontraintes de Von Mises (b).
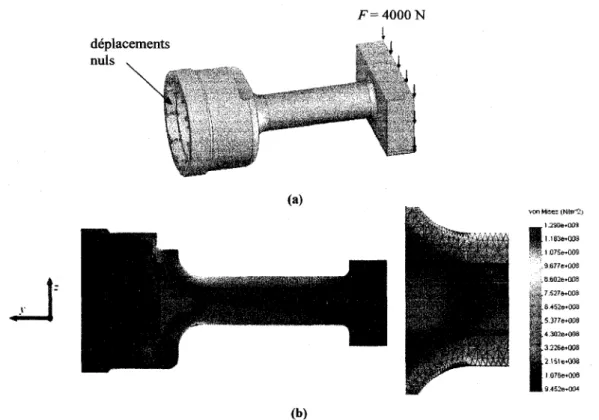
3.3.3 Analyse par elements finis "B"
L'analyse "B" (figure 3.6) simule le second chargement critique de conception : 4000 N appliques a Pextremite externe de la pedale. On examine la contrainte de Von Mises maximale dans le rayon R.
F = 4 0 0 0 N
Figure 3.6 -Analyse par elements finis "B". Conditions aux limites : -4000 N appliques selon I'axe z a I'extreinite' externe de la pedale (a). Risultats : contraintes de Von Mises (b).
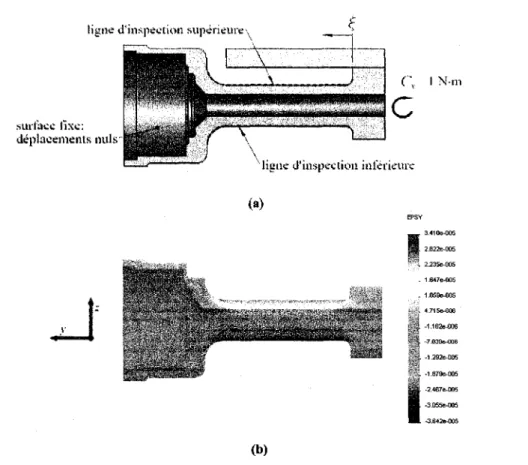
3.3.4 Analyse par elements finis "C"
L'analyse "C" (figure 3.7) ne simule pas un cas particulier de chargement. Elle illustre la distribution des deformations a la surface de l'arbre et determine la zone ou les deformations sont lineaires. On verra a la section 6.0 que les jauges sont collees dans une zone de deformation lineaire et que la sensibilite du systeme est directement proportionnelle a la longueur de cette zone.
ligne d'inspection superieure\
surface fixe: ^placements mils
ligne d'inspection iiiferieure
(a)
J
J "SM
(b)
Figure 3.7 - Analyse par elements finis "C". Conditions aux limites : 1 N-m applique selon 1'axe x sur la pedale (a). Resultats : deformation de l'arbre (b).
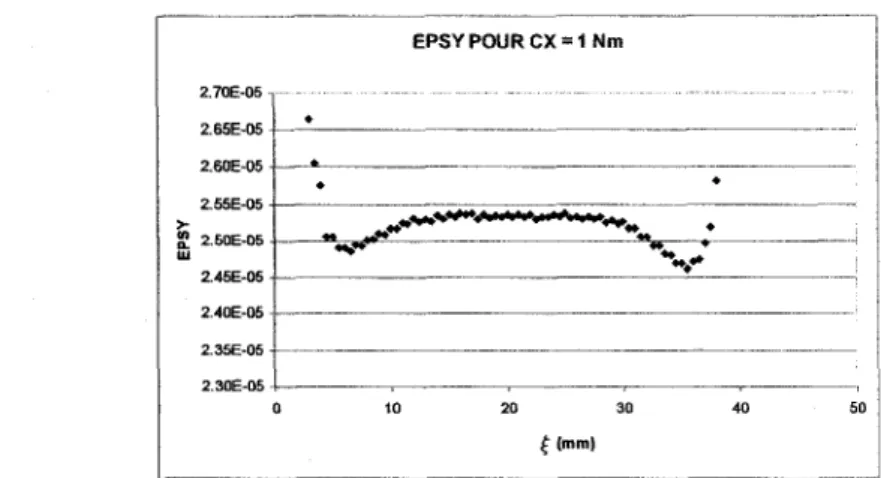
La figure 3.8 montre le trace de la deformation ev selon £ sur la ligne d'inspection sup6rieure : EPSYPOURCX = 1Nm 2.70E-05 2.65E-05 2.60E-05 2.55E-05 >-gj 2.60E-05 Ui 2.45E-0S 2.40E-06 2.36E-05 2.30E-05 • •
^ * Nr
f (mm)Figure 3.8 - Trace de la deformation £ v selon t (rcf. fig. 3.8) sur la ligne d'inspection superieure de I'analyse "C".
3.3.5 Conclusion
C'est ainsi que les variables R, r, 0e et T3 de la figure 3.4 ont ete determinees. La figure
3.9 montre les dimensions finales.
E = 60.5 22 mtf&k
7TTZ
371
D = 14.5 103.3.6 Raideur et frequence naturelle du corps d'epreuve
La figure 3.10 schematise une force F selon -z appliquee sur le corps d'epreuve avec des dimensions finales vis-a-vis le centre du pied. Le deplacement selon -z qui en resulte est
de 4.65-10"8 m/N. La rigidite k est done :
£ = 2.15-107N/m (3.1)
Figure 3.10 - Force F selon -z appliquee sur le corps d'epreuve vis-a-vis le centre du pied.
La figure 3.11 schematise le corps d'epreuve avec une masse m qui represente la masse du cycliste. La frequence naturelle peut etre calculee a partir de l'equation suivante :
1 Ik
Fn = — . I— Hz (k en N/m; m en kg)
In \m (3.2)
Figure 3.11 - Corps d'epreuve avec une masse in qui represente la masse du cycliste
Avec une masse m de 40 kg, qui equivaut a la moitte de la masse totale d'un cycliste de 80 kg, la frequence naturelle estimee est:
Cette valeur est excellente puisqu'on estime que les phenomenes vibratoires indesirables sont evites lorsque la frequence naturelle d'un capteur est 3 fois plus elev£e que les
4 Instrumentation
Cette section pr^sente 1'instrumentation de la pedale dynamom&rique. Elle se divise en deux volets : ^instrumentation pour la mesure des forces et celle pour la mesure de la position angulaire. La mesure des forces s'effectue a l'aide de jauges extensometriques collees sur l'arbre qui constitue le corps d'epreuve. La position angulaire est mesur&s par un encodeur optique monte au bout de l'arbre et relie par une tige jusqu'a la manivelle.
4.1 Mesure des forces
Les jauges extensometriques sont des resistances electriques qui sont sensibles aux deformations locales a la surface d'un corps. En combinant plusieurs jauges dans un branchement specifique (pont de Wheatstone) et en les positionnant a des endroits strategiques sur un corps d'epreuve, il est possible de rendre le pont sensible a un nombre limite de composantes de force.
Pour la mesure des forces Fx et Fz, le principe de la poutre en porte-a-faux a ete exploits
pour obtenir deux ponts sensibles a une seule composante de force chacun : un pont
sensible a Fx et l'autre a Ft.
4.1.1 Strategic de positionnement et de branchement des jauges extensometriques
II existe une methode simple pour mesurer une force sur une poutre en porte-a-faux. II s'agit de brancher quatre jauges dans un pont de Wheatstone selon une configuration ou le signal de sortie est proportionnel a la force et insensible aux autres efforts. La figure 4.1 montre un schema de cet arrangement. On appelle « pont 1234 » le pont de Wheatstone
compose des jauges 1, 2, 3 et 4 et associe a la force verticale Fz. Le « pont ABCD » est
jaugc . jauue I V, ! jinigc 4 jaugfi 2 A
O
(a) *<« K-, &r (b)Figure 4.1 — Positionnement des jauges extensometriques pour la mcsure d'une force sur une poutre en porte-a-faux (a) avec le schema de branchement (b)
Pour le cas illustre ci-dessus, le signal AV depend de la tension d'alimentation EQ, le
facteur de jauge Sg et de la variation de resistance des quatre jauges ARj/Rji
AV = -EnS„
^ A ^ A ^ A ^ AR^
V ^ 1 ^ 2 R3 ^ 4 J
(4.1)
En sachant que s = — - , on peut ecrire
' R,
Ou encore:
AV = -E0Sge„ (4.3)
ou
SM — S{ E2 f 3 + f4 (4.4)
Pour le cas de chargement illustre a la figure 4.1(a), les deformations ei sont
proportionnelles a: *i = yxFz £2=y2Fz ^=-yxK £A 3 -y2F, (4.5) done
«« ^Cyi-^K
(4.6)En examinant les equations 4.3 et 4.6, on constate que le signal du pont de jauges AFest
proportionnel a la distance ( yl - y2) entre les jauges et aussi proportionnel a Fz.
La figure 4.2 montre le raeme cas avec les six chargements presents au bout de la poutre.
En ajoutant les chargements dans les cinq autres degres de liberty on peut etablir 1'expression matricielle qui permet d'estimer la deformation des quatre jauges :
0 -MAE +ylC/(El) -C/(El) 0 0
0 -MAE +y2Cl(El) -Cl(El) 0 0
0 -MAE -y£l(El) +Cl{El) 0 0
0 -MAE -y2C/{El) +C/(El) 0 0
(4.7)
La deformation totale devient:
1C o o ( F , - J >2) — o o o El (4.8) ou encore :
e,o,=iy
l-y
2)—
Fz
EI
(4.9)Ainsi, le signal de sortie est sensible a la composante Fz seulement du chargement total. II
est proportionnel a Fz et a la distance (y1 -y2) entre les jauges. Dans toute cette
demarche, on considere la section de la poutre constante et toutes les jauges sont placees a des endroits ou les effets de bouts et les concentrations de contraintes sont negligeables.
4.1.2 Instrumentation du corps d'epreuve
La strategie expliquee a la section 4.1.1 a ete mise en oeuvre sur 1'arbre de la pedale dynamometrique. Cependant, 1'arbre possede une g^ometrie a section non constante qui occasionne des variations de contraintes et des concentrations de contraintes pour tous les types de chargement.
Pour choisir l'emplacement des jauges, il faut etudier la distribution des deformations le long de l'arbre et delimiter une zone lineaire de deformation. L'analyse par elements finis "C" presentee a la section 3.3.4 est un exemple d'etude qui permet de trouver cette zone.
En appliquant un couple Cx de 1 N-m, on examine la deformation le long des lignes
d'inspections sur lesquelles seront placees les jauges. On etablit ainsi les deformations engendrees par chacune des six composantes et on les compare a la valeur theorique de la resistance des materiaux (RDM), qui ne tient pas compte des effets de bouts et des concentrations de contraintes. La figure 4.3 montre le meme trace que la figure 3.8 avec la superposition de la valeur theorique issue de la RDM sans considerer les effets de bouts.
EPSYPOURCX = 1 Nm COMPARISON AEF-RDM 2.70E-05 2.65E-05 2.60E-05 2.55E-05 >-2 >-2.50E-05 ul 2.4SE-0S 2.40E-05 2.35E-05 2.30E-05 l^i^^itd^JM^taiU—<M*in»»iy^| ^^ AEF -RDM 20 30 f (mm) 50
Figure 4.3 - Comparaison AEF - RDM de £v selon f (reT. fig. 3.8) sur la ligne d'inspection superieure
de l'analyse par elements finis "C".
A la figure 4.3, on constate que les changements de section de l'arbre entrainent des effets de bouts a chaque extremite. On peut aussi dire qu'il y existe une zone lineaire quelque part entre £ = 10 mm et £ = 30 mm.
Pour raffiner la precision de la delimitation de la zone lineaire, on trace Tecart relatif entre
EPSYP0URCX=1Nm ECART RELATIF AEF-RDM
3.00% 2.50% 2.00% 1.50% 1.00% 0.60% 0.00% -0.50% -1.00% • ***• • " • •
*v. -
• • % • • • *• • — * • * • » • • • • • > • • . * • • 20 30 f (mm)Figure 4.4 ficart relatif [(RDM-AfiF)/A£F] de £v selon £ stir la ligne d'inspection superieure de I'analyse par Elements finis "C".
On delimite finalement la zone selon un critere de selection fixe a 0.50 % d'ecart maximal.
La zone se situe done entre 10 mm et 31 mm pour ce qui est de Cx. Le tableau 4.1 montre
les zones obtenues pour les chargements Fy, Fz et Cx.
Tableau 4.1 - Zones de sensibility lin&iire sur la ligne d'inspection superieure de I'arbre pour Fy, Fz et
Fy F,
c
x ^mi„ (mm) 11 9 10 £„ax (mm) 25 30 31L'emplacement final des jauges est dans la zone comprise entre £ = 11 mm et £ = 29 mm.
Bien que ^max pour F soit 25 mm, on estime que les deformations occasionnees par cette
force sont beaucoup plus petites que celles occasionnees par F2 et Cx puisqu'elle sollicite
I'arbre en chargement axial plutot qu'en flexion. La figure 4.5 montre les jauges en position sur I'arbre (a) et le schema d'une jauge avec ses dimensions (b).
(b)
Figure 4.5 - Positionnement des jauges sur le corps d'epreuve (a) et dimensions principales de la jauge CEA-06-062UW-350 (b).
Le pont ABCD sensible a Fx fonctionne exactement de la meme maniere que le pont 1234.
La figure 4.6 montre le corps d'epreuve avec les huit jauges qui forment les ponts 1234 et ABCD. januc .< juuge C javigc 4 jjiuae D arhrc
4.1.3 Sensibilite theorique
En introduisant les valeurs numeriques dans l'equation 4.9, on peut trouver la deformation theorique du pont de jauge :
EI yx-y2 = 0.0164 m C = — = 0.0065 m 2 £ = 200-10* Pa 64 284-10-9m4 (4.10)
stot = 0.8302 -lO"6^ (Fz enNewtons, slo, enm/m) (4.11)
En faisant de meme pour l'equation 4.3, on trouve
AV = -E0Sgstot (4.12)
S =2.145
4.2 Mesure de la position angulaire
La position angulaire de la pedale par rapport a la manivelle est une donnee critique. Elle est essentielle pour le calcul de la puissance et de l'efficacite du cycliste.
L'angle (p entre la pedale et la manivelle illustre a la figure 4.7 est mesure avec un encodeur optique. La cage externe de l'encodeur est fixee a l'arbre de la pedale dynamometrique. L'axe de l'encodeur est fixe a la vis de serrage du roulement qui est elle-meme solidaire a la manivelle. Les signaux de sortie de l'encodeur sont traitees par un module electronique qui fournit une tension analogique de 0 a 4.092 V et proportionnelle a Tangle cp.
4.2.1 Position de l'encodeur optique
Comme il est montre" aux sections 2.3.2 et 3.3, l'arbre de la pexlale est concu pour accueillir un encodeur a une extr&nite et est perce sur toute sa longueur pour laisser passer une tige liee a la manivelle. La figure 4.8 montre comment le mouvement de rotation est transmis. Les composantes en vert sont liees a la manivelle et les composantes en rouge sont solidaires a l'arbre de la pedale. C'est le roulement a billes qui fait le lien entre les deux parties.
tige pour corps de
encodeur 1'encodeur
arbre de 1'encodeur'
Figure 4.8 - Transmission de la rotation a l'encodeur.
L'accouplement entre la tige pour encodeur et la vis de serrage transmet la rotation seulement. Comme le montre la figure 4.9, un jeu axial (selon l'axe y) entre ces deux pieces permet d'eviter que des efforts soient transmis dans cette direction.
v i s de s e r r a g e
Figure 4.9 - J e u dans l'accouplement de la tige pour encodeur et la vis de serrage.
4.2.2 L'encodeur
L'encodeur choisi est compact et leger. II offre une resolution de 1/1024 tour soit 0.35°. Son fabricant est CUI et son numero de modele est CUI-NSB-256-2CA-105-030. Ses
J
1 « *
Figure 4.10 - Dimensions generates de Pencodeur.
(•C U t )»C.. 2006! SPECIFICATIONS •L- ~ - J Y P E ! SupptyWotegB '. Cunent : Otnput | H ; VoUage | L j SlnkCuirent \ Signal Rtsetime s Fpeo, Response! yotojeWtfta;md;
1CA j 2CA |2MCA e'jfvDC *«wT 50mA max. S0.5V 20mA max. £1uS 50kHz 50V max. MECTttNEAt O07P0TMMHEFOHM CJOCMM rotobn A H ] flwn (nut
ouTPUTC/ROUTr -Signal A Signal B Signal Z _j j i i_ i lalbldd
(}
-—• Os&ei SWNIMnDBESOtl/noWS-NSB-XX 100100P/R 300 300 P/R 200 200 FVR 250 250FVPI 25625SP/H 360 360P/R 4O0«0PiP, 500500 P/P. OROEfma INFORMATION NSB-i . . P P h = P±0.75P ajb.c.d =-r-±g-Wave Duty Ratio: 50%±25% ENVIRONMBiOL
Ctiamwte- 1
1. Max Shalt Load, ratal: 200 gf atiab 200<gf 2. Moment of Inertia: 0.1g«c!iiF 3. AngularAccelerafon: 1x10* rad©2
4. Max Slewing Speed: 6000 RPM 5. Stoning Toque: 5gKrnmax. 6. Rofdional Life: 1 xio'tpnrhra
2 Storage Temp: -20"to+65aC 3. Humkfh/: s85%PK no condensation 4. Vitiation: 10-55 Hz. 1.5 mm, 2 hra 5. Shock 50a 11ms,3axes,Steps
IWiWHBV AIR iKnTlE-J 09; C U I Inc. 20050 SW 112th Ave. Tualatin, OR. 9TO62 Tel: 5C3.6I2.2.W0 FAX: K&6I2.238I
09it4»S IKUUSD
NSB-XX-XXCA-XXX-XXX
Figure 4.11 - Fiche technique de I'encodeur CU1-NSB-256-2CA-105-030.
L'encodeur possede trois signaux de sortie : A, B et Z. AetB emettent chacun 256 PPR et leurs signaux sont dephases d'un quart de cycle l'un par rapport a l'autre, d'ou l'appellation de « quadrature ». Z est l'index et emet un seul PPR. La duree des impulsions est ajustable pour accommoder l'61ectronique qui traite 1'information.
4.2.3 Module electronique de l'encodeur
Un module electronique traite les signaux provenant de l'encodeur et fournit une tension entre 0 et 4.092 V proportionnelle a Tangle (p. La figure 4.12 montre par dtape le traitement des signaux provenant de l'encodeur.
Eticodeur
4 0 ~l-
l
:'..
l
..±
, ! 1 ,
:!..:.'::
: , : j ;
Com n t i ^ e u t Ac quadrature
cr.Ki l||||||iill|IUIi|IIIIIUIlllJII||l!!!L:!!lll!!!:;!!l||!i'.;!llll!!; ..!lll!!pj!|]|!!!:il!l
MuJtiplicalriy sc-*
ConvcL'ti«Mir tiiua«ii([ii* »ita£oKulu« 11 bits
Figure 4.12 -Traitement des signaux provenant de l'encodeur.
Les signaux de sortie AetB sont achemines vers le convertisseur de quadrature.
Le principe de la quadrature est de considerer comme un evenement chaque front montant et chaque front descendant de deux signaux carres dephases. Pour un pulse, il y a un front montant et un front descendant pour chaque signal done un total de quatre evenements. Pour chaque 6venement on peut connaitre la direction de la rotation en regardant la valeur de 1'autre signal.
Le convertisseur de quadrature utilise ce principe et donne en sortie un compte CLK et une direction UPDN. Pour un tour de pedale autour de la manivelle, CLK emet 1024 pulses et
C/PZWindique en tout temps le sens de rotation.
Les signaux CLK et UPDN entrent ensuite dans un multiplicateur de signaux avant d'etre finalement achemines dans un convertisseur numerique-analogique 12 bits (CNA 12 bits).
00
00
de CLK. Le signal passe ainsi de 1024 PPR a 4096 PPR. Le CNA tient le compte des impulsions recues grace au signal CLK4 et a la direction UPDN et fournit une tension E analogique proportionnelle au ratio sur 4096. La tension maximale fournie est de 4.095 V done elle augmente avec un increment de 1 mV pour chaque pulse de CLK4. Lorsque le CNA a compte 4096 impulsions, il a atteint son maximum. II retourne naturellement a zero lors du prochain compte. Si le compte est a zero et qu'il recoit une impulsion avec une direction negative, le compteur tombe a 4096.
L 'index (sortie 2) est aussi achemine au CNA et sert de « remise a zeYo ». Lorsque son
impulsion se produit, le compte du CNA tombe automatiquement a zero, peu import© quel etait le compte actuel. Cette impulsion se produit une fois par tour. Elle devrait en tout temps coi'neider avec le retour a zero naturel (du au fait qu'il a atteint son maximum a 4096). L 'index previent done que des erreurs s'accumulent au fil du temps.
La duree des impulsions dans le systeme electronique est reglee a une valeur fixe. Lorsque la vitesse de rotation de l'encodeur augmente et que l'intervalle de temps entre deux impulsions devient trop petit, P electronique ne peut plus fonctionner correctement. La vitesse maximale du systeme est de 12 tours par secondes.
En resume,
• la mesure se fait par l'entremise d'un encodeur optique et de puces electroniques; • le signal de sortie est une tension analogique comprise entre 0 et 4.092 V et
proportionnelle a l'angle (p;
• le systeme reconnait le sens de rotation : il incremente ou decremente son signal
selon la situation;
• la resolution du systeme est de 0.35°;
• la vitesse maximale de fonctionnement est de 12 tours par secondes.
Le tableau 4.2 montre les valeurs qui caracterisent le systeme de mesure de l'angle (p.
Tableau 4.2 -Valeurs maximales et resolutions pour la mesure de la position angulaire (p.
Pulses par revolution (PPR) Tension analogique de sortie (E) Angle entre p&lale et manivelle (cp)
valeur max. 1024 4.092 V 359.65 ° resolution 1 0.004 V 0.35°
5 Etalonnage
Bien que les sensibilites theoriques des ponts de jauges de la pedale dynamometrique et du systeme de mesure de position angulaire soient connues, 1'etalonnage est essentiel pour mesurer les reponses des capteurs et ainsi determiner leurs veritables sensibilites. La figure 5.1 montre deux photos prises lors de l'etalonnage des ponts de jauges dans le laboratoire de VelUS.
(a) (b)
Figure 5.1 - Etalonnage des ponts de jauges de la pedale dynamometrique pour Fx (a) et Cz (b).
r
5.1 Etalonnage des ponts de j auges
L'etalonnage des ponts de jauges consiste a mesurer la sensibilite de chacun des ponts pour chacune des six composantes de chargement. Celles-ci sont appliquees separement sur la pedale dynamometrique. En faisant varier leur intensite, on mesure les reponses des ponts.
Plusieurs outils et accessoires ont ete fabriques afin de permettre et faciliter l'etalonnage.
5.1.1 Outils, accessoires et montages
La barre en « H » montree a la figure 5.2 se fixe a la plateforme Look CX-7 de la pedale dynamometrique. Elle est symetrique et munie de quatre rangees de trous poinconnes.
Figure 5.2 - Barre en « H » pour I'etalonnage.
Un bloc d'acier sert d'encastrement pour la pedale et des masses sont placees sur la barre en « H ». En ajoutant des masses et en les deplacant sur les differents trous poinconnes, on
applique de maniere isolee les quatre composantes de chargements : Fx, Fz, Cx et C2.
Les figures 5.3 a 5.6 montrent ces montages.
Figure 5.5 - Etalonnage de C*. Figure 5.6 -foalonnage de C-.
Un bloc de bois presente a la figure 5.7 est egalement utilise pour l'etalonnage. Une cale de pedale Look CX-7 est vissee a sa base et est entour^e partiellement de tiges filet6es. Ce
bloc est plus robuste que l'outil en « H » et il permet d'appliquer de plus grandes charges
F. et F..
5.1.2 Rcsultats
Les figures 5.8 a 5.11 montrent les reponses en tension pour les deux ponts de jauges lors
des chargements Fx, Fz, Cx et Cz. La tension d'alimentation Eo est 10 V.
1.00 -, 0.80 0.60 | 0.40 UJ 0.00 -0.20 -0.40 -0.60
REPONSES DES PONTS A FX
y = 4 . 3 0 9 E - 0 3 X - 5.315E-04 R;- 1 nnnp+nn " y = -4.928E-06X - 2 . 1 5 6 E - 0 3 R2 = 4 p n s F - n ? -150 -100 -50 0 50 100 150 200 F X ( N ) • Pool ABCD (rnV) • Pant 1234 (mV)
Figure 5.8 - Reponses des ponts de la pedale dynamometrique pour un chargement Fx. E„ = 10 volts.
1.00 0.50 _ 0.00 o -oso
i
ui •- -1.00REPONSES DES PONTS A FZ
/ y - -2.680E-05X + 3.S42E-01 R! - 3.860E-01 / , ^ ~ --, y = 4.373E-03X + 2.907E-04 tf-LOOOE-MJO