UNIVERSITÉ MOHAMMED V
FACULTÉ DES SCIENCES
Rabat
Faculté des Sciences, 4 Avenue Ibn Battouta B.P. 1014 RP, Rabat – Maroc Tel +212 (05) 37 77 18 34/35/38, Fax : +212 (0) 37 77 42 61, http://www.fsr.ac.ma
Thèse de Doctorat
Présentée par
Ali JORIO
Titre
Le Clustering basé sur la Classification Spectrale pour l'Optimisation
d'Energie dans les Réseaux de Capteurs Sans Fil Homogènes
Discipline : Sciences de l’ingénieur
Spécialité : Informatique et Télécommunications
Soutenue le 26/12/2015, devant le jury composé de :
Président :
Driss ABOUTAJDINE
PES, Faculté des Sciences, Rabat, Maroc.
Examinateurs :
Mohammed EL MARRAKI
PES, Faculté des Sciences, Rabat, Maroc.
Mohammed ABBAD
PES, Faculté des Sciences, Rabat, Maroc.
Youssef FAKHRI
PH, Faculté des Science, Kénitra, Maroc.
Rachid SAADANE PH, Ecole Hassania des Travaux Publics, Casablanca,
Maroc.
Mohammed OUMSIS PH, Ecole Supérieure de Technologie, Salé, Maroc.
Sanaa EL FKIHI PH, Ecole Nationale Supérieure d’Informatique
d’Analyse des Systèmes, Rabat, Maroc.
Invité :
Brahim ELBHIRI
Docteur, Enseignant à l’EMSI, Rabat, Maroc.
A
VANT-
PROPOSC’est avec grand plaisir que je r´eserve ces lignes en signe de gratitude et de recon-naissance `a tous ceux qui ont contribu´e de pr`es ou de loin `a l’´elaboration de ce travail de th`ese que je tiens `a remercier du profond du cœur.
Les travaux pr´esent´es dans ce manuscrit ont ´et´e effectu´es au Laboratoire de Re-cherche en Informatique et T´el´ecommunications (LRIT-CNRST 29) de la Facult´e des Sciences de Rabat (FSR), Universit´e Mohammed V au Maroc sous la direction de Mon-sieur Mohammed ABBAD et l’encadrement de Madame Sanaa EL FKIHI.
Je commence par pr´esenter ma plus vive gratitude `a mon directeur de th`ese Monsieur Mohammed ABBAD, Professeur de l’enseignement sup´erieur `a la Facult´e des Sciences de Rabat (FSR), pour ses ann´ees de soutien, pour ses pr´ecieux conseils scientifiques et humains, ainsi que pour ses encouragements.
Je tiens `a exprimer mes remerciements `a mon encadrante, Madame Sanaa EL FKIHI, Professeur habilit´e `a l’Ecole Nationale Sup´erieure d’Informatique et d’Ana-lyse des Syst`emes (ENSIAS). Grˆace `a ses encouragements, sa p´edagogie et ses pr´ecieux conseils, elle a su me guider pour mener `a bien mes travaux de recherche. J’exprime ici ma profonde gratitude `a son ´egard et l’estime respectueuse que je lui porte.
Je tiens ´egalement `a exprimer mes tr`es sinc`eres remerciements aux membres du jury, qui ont accept´e d’´evaluer mes travaux de th`ese.
Je veux exprimer toute ma reconnaissance et ma gratitude `a Monsieur Driss ABOU-TAJDINE, Professeur de l’enseignement sup´erieur `a la Facult´e des Sciences de Ra-bat (FSR), directeur du Centre National pour la Recherche Scientifique et Technique (CNRST) et du laboratoire LRIT-CNRST 29 de m’avoir fait l’honneur de pr´esider mon jury de th`ese. Je souhaite ´egalement lui pr´esenter ma plus grande gratitude pour m’avoir int´egr´ee au sein de son laboratoire et d’avoir toujours ´et´e pr´esent pour ses doc-torant malgr´e ses occupations.
Mes remerciements vont `a Monsieur Mohammed EL MARRAKI, Professeur de l’enseignement sup´erieur `a la Facult´e des Sciences de Rabat (FSR), d’avoir accept´e de rapporter mes travaux de th`ese et de participer au jury.
Je remercie ´egalement Monsieur Youssef FAKHRI, Professeur habilit´e `a la Facult´e des Sciences de K´enitra (FSK), pour avoir accept´e de rapporter ce travail et de participer au jury. Merci pour ses remarques constructives qui m’ont beaucoup aid´e `a am´eliorer la qualit´e de ce manuscrit.
Merci `a Monsieur Rachid SAADANE, Professeur habilit´e `a l’Ecole Hassania des Travaux Publics de Casablanca (EHTP), de m’avoir fait l’honneur de rapporter mes travaux de th`ese et de participer au jury. Je voudrais lui t´emoigner ma gratitude pour ces remarques et conseils constructives.
Aussi, Je voudrais remercier Monsieur Mohammed OUMSIS, Professeur habilit´e `
a l’Ecole Sup´erieure de Technologie de Sal´e (EST), pour avoir accept´e d’examiner ce travail et de participer au jury.
J’adresse de vifs remerciement `a Monsieur Brahim ELBHIRI, Enseignant Cher-cheur `a l’EMSI de Rabat, pour son enthousiasme, ses pr´ecieux conseils, sa disponibilit´e et le partage de ses nombreuses connaissances lors de nos nombreuses discussions. Merci aussi d’avoir participer au jury.
Mes remerciements s’adressent ´egalement `a toute ma famille. Je tiens `a exprimer mes sentiments les plus respectueux et ma profonde reconnaissance `a mes tr`es chers parents, `a mon fr`ere et `a Maryam, pour les encouragement constants qu’ils ont d´eploy´e. Je remercie aussi mes coll`egues du laboratoire LRIT-CNRST 29.
R´
ESUM´
ELes progr`es technologiques r´ealis´es ces derni`eres ann´ees ont permis le d´eveloppement d’une nouvelle g´en´eration de r´eseaux informatiques et t´el´ecoms, pr´esentant des d´efis important et donnant acc`es `a des domaines de recherches attractifs : Les r´eseaux de capteurs sans fil.
Un r´eseau de capteurs est un r´eseau comprenant un ensemble de dispositifs auto-nomes charg´es de la surveillance ou de la mesure d’un ph´enom`ene physique et de la trans-mission des donn´ees le concernant vers un centre de traitement. Grˆace aux nombreux avantages qu’ils offrent, ces r´eseaux ont envahi de multiples domaines d’applications qu’ils soient scientifiques, logistiques, militaires ou encore sanitaires.
Cependant, l’´economie d’´energie pr´esente l’un des plus grands d´efis de ce type de r´eseaux. Une solution qui peut ˆetre propos´e consiste `a am´eliorer l’efficacit´e ´energ´etique des protocoles de communication. Dans ce sens, le regroupement des nœuds du r´eseau de capteurs sans fil en clusters s’av`ere ˆetre une des m´ethodes les plus efficace.
Ainsi, nos travaux de recherches ont pour objectif l’am´elioration de l’efficacit´e ´ ener-g´etique des r´eseaux de capteurs sans fil homog`enes. Nous proposons des protocoles de routage hi´erarchique qui se basent, dans le processus de clustering, sur la classification spectrale et la th´eorie des graphes. Ces protocoles permettent d’optimiser la consom-mation d’´energie des capteurs en (i) regroupant les nœuds pr´esentant le plus d’affinit´e dans le mˆeme cluster, en (ii) d´efinissant un nombre optimal de clusters que le r´eseau doit contenir, en (iii) ´evitant la formation p´eriodique des clusters, en (iv) pla¸cant uniform´ e-ment les chefs des clusters `a travers le r´eseau de capteurs sans fil, et en (v) distribuant la dissipation d’´energie uniform´ement sur l’ensemble des nœuds capteurs.
Mots-clefs : R´eseaux de capteurs sans fil ; Clustering ; Routage hi´erarchique ; Clas-sification spectrale ; Optimisation d’´energie.
A
BSTRACTIn recent years the technologicy has resulted in the development of a new generation of telecom networks that provide access to attractive research areas, namely Wireless Sensors Networks.
A wireless sensor network (WSN) is a network containing a set of autonomous nodes responsible for the supervision of a physical phenomenon. Through the variety of benefits that they offer, WSNs have invaded multiple fields of applications.
However, energy conservation is the main requirement for this kind of networks. A suitable solution would be to improve the energy consumption of communication protocols. Accordingly, the grouping of sensor nodes in clusters has proven to be one of the most effective methods for solving this problem.
Thus, the objective of this thesis is to deal with energy optimization in the homoge-neous wireless senor network. In this respect, we propose hierarchical routing protocols based on the spectral clustering and graph theory which distribute the energy dissipa-tion evenly among all sensor nodes so as to improve network lifetime and average energy saving. The proposed protocols optimize the energy consumption of the sensor nodes through : (i) gathering similar nodes in the same cluster, (ii) defining the optimal num-ber of clusters that the network must contain, (iii) avoiding periodic clusters formation, (iv) placing cluster-heads uniformly throughout the whole sensor fields, (v) balancing energy usage on the all sensor nodes.
Key-words : Wireless Sensor Networks ; Clustering ; Spectral classification ; Energy Consumption ; Graph clustering.
T
ABLE DES MATI`
ERESAvant-propos i
R´esum´e iii
Abstract v
Liste des abr´eviations xi
Liste des figures xvii
Liste des tableaux xviii
Liste des algorithmes xix
Introduction g´en´erale 1
Chapitre 1 : G´en´eralit´es sur les RCSFs . . . 5
1.1 Introduction . . . 5
1.2 Capteur sans fil : Architecture et caract´eristiques . . . 6
1.2.1 Architecture d’un capteur sans fil . . . 7
1.2.2 Caract´eristiques d’un capteur sans fil . . . 8
1.3 RCSFs : Contraintes et caract´eristiques . . . 10
1.3.1 Facteurs influen¸cant la conception des RCSFs . . . 10
1.3.2 Architectures adopt´ees pour les RCSFs . . . 12
1.3.3 Les d´efis des RCSFs . . . 14
1.4 Domaines d’application des RCSFs . . . 16
1.4.1 Applications militaires . . . 16
1.4.2 Applications environnementales . . . 17
1.4.3 Applications m´edicales . . . 17
1.4.4 Applications industrielles . . . 18
1.6 Conclusion . . . 19
Chapitre 2 : Optimisation d’´energie dans les RCSFs - Etat de l’art - . . 21
2.1 Introduction . . . 22
2.2 Approches g´en´erales de conservation de l’´energie . . . 23
2.2.1 Duty-cycling . . . 25
2.2.2 Techniques orient´ees donn´ees . . . 29
2.2.3 Techniques orient´ees mobilit´e . . . 32
2.3 Techniques de clustering . . . 32
2.3.1 Clustering-Rappel . . . 33
2.3.2 Crit`eres de performances d’un processus de clustering . . . 35
2.3.3 Les principales approches de clustering . . . 35
2.3.4 Algorithmes de clustering con¸cus pour les RCSFs . . . 39
2.4 Conclusion . . . 44
Chapitre 3 : Classification spectrale et th´eorie des graphes . . . 49
3.1 Introduction . . . 49
3.2 Th´eorie des graphes . . . 52
3.2.1 D´efinitions . . . 52
3.2.2 Matrices associ´ees `a un graphe . . . 53
3.3 Classification spectrale . . . 54
3.3.1 Classification et ´el´ements spectraux de la matrice affinit´e gaussienne 55 3.3.2 D´efinition du nombre de classes K . . . . 57
3.3.3 Les coupes de graphe et le probl`eme de partitionnement . . . 57
3.4 Algorithmes de classification spectrale . . . 59
3.4.1 Algorithmes de classification spectrale bi-partite r´ecursifs . . . 59
3.4.2 Algorithmes de classification spectrale k-way . . . 61
3.5 Conclusion . . . 62
Chapitre 4 : Nos contributions vers des processus de clustering minimi-sant la consommation d’´energie dans les RCSFs . . . 65
4.1 Introduction . . . 65
4.2 Pr´eliminaires . . . 66
4.2.1 Mod`ele du r´eseau . . . 66
4.2.2 Objectifs d´esir´es du clustering . . . 67
4.3 Mod`ele de communication radio et sa consommation d’´energie . . . 68
4.4 Etapes du processus de clustering propos´´ ees . . . 71
4.4.1 Pr´e-traitement . . . 72
4.4.2 Formation des clusters . . . 73
4.4.3 D´efinition du nombre optimal de clusters . . . 75
ix
4.4.5 Mod`ele de communication intra-cluster . . . 79
4.5 Conclusion . . . 79
Chapitre 5 : Protocoles de routage hi´erarchique bas´es sur la classifica-tion spectrale . . . 81
5.1 Introduction . . . 81
5.2 Pr´eliminaires . . . 82
5.3 LESCA : Location-Energy Spectral Clustering Algorithm . . . 83
5.3.1 Phase d’installation . . . 83
5.3.2 Phase de communication des donn´ees . . . 86
5.3.3 Proc´edure g´en´erale du LESCA . . . 86
5.4 MR-KSCA : Multi-Relay K-way Spectral Clustering Algorithm . . . 88
5.4.1 Phase d’installation . . . 89
5.4.2 Phase de communication des donn´ees . . . 91
5.4.3 Proc´edure g´en´erale du MR-KSCA . . . 91
5.5 MHCA-SC : Multi-Hop Clustering Algorithm based on Spectral Classifi-cation . . . 94
5.5.1 Phase d’installation . . . 94
5.5.2 Phase de communication des donn´ees . . . 96
5.5.3 Proc´edure g´en´erale du MHCA-SC . . . 97
5.6 Evaluation des performances . . . 100
5.6.1 Mod`ele de simulations . . . 100
5.6.2 R´esultats de simulations . . . 101
5.7 Conclusion . . . 110
Conclusion et Perspectives 111 Liste des publications 115 Bibliographie . . . .117
L
ISTE DES ABR´
EVIATIONS3hBAC 3-hop Between Adjacent Cluster-heads ACE Algorithm for Cluster Establishment
C4ISRT Command, Control, Communications, Computers, Intelligence, Surveillance, Reconnaissance, and Targeting
CAN Convertisseur Analogique Num´erique CBRP Cluster Based Routing Protocol C-H Cluster-head
DECSA Distance-Energy Cluster Structure Algorithm EECS Energy Efficient Clustering Scheme
EEHC Energy Efficient Hierarchical Clustering
EEMC Energy-Efficient Multi-level Clustering algorithm FND First Node Dies
GPS Global Positioning System
HEED Hybrid Energy-Efficient Distributed Clustering HND Half of the Nodes Die
LCA Linked Cluster Algorithm
LEACH Low Energy Adaptive Clustering Hierarchy
LEACH-C Centralized Low Energy Adaptive Clustering Hierarchy
LEACH-F Fixed number of clusters Low Energy Adaptive Clustering Hierarchy LESCA Location-Energy Spectral Clustering Algorithm
LND Last Node Dies
MEMS Micro-Electro-Mechanical Systems
MHCA-SC Multi-Hop Clustering Algorithm based on Spectral Classification MOCA Multi-hop Overlapping Clustering Algorithm
MR-KSCA Multi-Relay K-way Spectral Clustering Algorithm NS2 Network Simulator 2
NS3 Network Simulator 3
PSO Particle Swarm Optimisation RCSFs R´eseaux de Capteur Sans Fil RSB Rapport Signal sur Bruit SB Station de Base
SCNOC Spectral Classification based on Near Optimal Clustering TCCA Time Controlled Clustering Algorithm
xiii
TL-LEACH Two-Levels Hierarchy for Low Energy Adaptive Clustering Hierarchy WCA Weighted Clustering Algorithm
L
ISTE DES FIGURES1.1 Architecture d’un r´eseau de capteurs sans fil . . . 6
1.2 Les composantes d’un capteur sans fils . . . 7
1.3 Exemple de nœud capteur sans fil. Ici, un nœud de la soci´et´e Coronis [1], groupe Elster. . . 9
1.4 Chronologie des plate-formes de capteurs [7] . . . 9
1.5 Classification des r´eseaux de communication . . . 11
1.6 Transmission directe . . . 13
1.7 Transmission en multi sauts . . . 13
1.8 Clustering . . . 14
1.9 Les domaines d’applications des r´eseaux de capteurs sans fil . . . 16
2.1 Consommation d’´energie d’un capteur sans fil [12]. . . 23
2.2 Taxonomie des approches de conservation d’´energie dans les r´eseaux de capteurs sans fil. . . 24
2.3 Taxonomie des approches de duty-cycling. . . 26
2.4 Classification des protocoles de contrˆole de la topologie. . . 27
2.5 Classification des protocoles de gestion de puissance. . . 28
2.6 Classification des techniques orient´ees donn´ees. . . 29
2.7 Classification des techniques orient´ees mobilit´e. . . 32
2.8 Organigramme classique de l’´etape de formation des clusters . . . 34
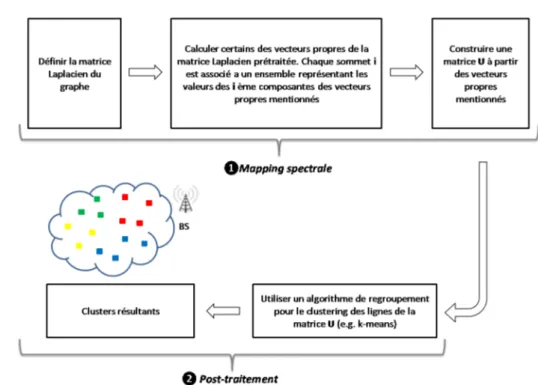
3.1 Sch´ema g´en´eral de la classification spectrale. . . 54
3.2 Partitionnement bi-partite r´ecursif d’un graphe . . . 55
3.3 Partitionnement k-way d’un graphe . . . 56
4.1 Exemple de distribution d’un RCSF. . . 67
4.2 Mod`ele d’´energie du support radio. . . 68
4.3 Etapes de notre processus de clustering. . . 72
4.4 Sch´ema g´en´eral de l’´etape de pr´e-traitement. . . 72
5.1 Organigramme du fonctionnement des protocoles propos´es. . . 83
5.2 Illustration du r´esultat du clustering par le protocole LESCA. . . 84
5.3 Diff´erence entre les valeurs propres successives de la matrice Laplacien pr´esent´e dans l’algorithme(4.2). . . 85
5.4 Illustration du r´eseau apr`es l’´election des cluster-heads par le protocole LESCA. . . 85
5.5 Illustration du r´eseau apr`es la mort de la moiti´e des nœuds capteurs par le protocole LESCA. . . 86
5.6 Illustration du r´esultat du clustering par le protocole MR-KSCA. . . 90
5.7 Illustration du r´eseau apr`es l’´election des cluster-heads par le protocole MR-KSCA. . . 90
5.8 Illustration du r´eseau apr`es la mort de la moiti´e des nœuds capteurs par le protocole MR-KSCA. . . 91
5.9 Illustration du r´esultat du clustering par le protocole MHCA-SC. . . 95
5.10 Illustration du r´eseau apr`es l’´election des cluster-heads par le protocole MHCA-SC. . . 95
5.11 Illustration du r´eseau apr`es la mort de la moiti´e des nœuds capteurs par le protocole MHCA-SC. . . 96
5.12 Illustration du r´eseau lors des communications inter-clusters par le proto-cole MHCA-SC. . . 97
5.13 Dur´ee de vie du syst`eme pour les six protocoles compar´es. . . 102
5.14 Dissipation moyenne d’´energie du syst`eme pour les six protocoles compar´es.102
5.15 Quantit´e de donn´ees re¸cue par la SB pour les six protocoles compar´es. . . 103
5.16 Impact du nombre de nœuds sur les performances des protocoles compa-r´es : FND. . . 104
5.17 Impact du nombre de nœuds sur les performances des protocoles compa-r´es : HND. . . 104
5.18 Impact du nombre de nœuds sur les performances des protocoles compa-r´es : LND. . . 105
5.19 Impact de l’´energie initiale des nœuds sur les performances des protocoles compar´es : FND. . . 106
5.20 Impact de l’´energie initiale des nœuds sur les performances des protocoles compar´es : HND. . . 106
5.21 Impact de l’´energie initiale des nœuds sur les performances des protocoles compar´es : LND. . . 107
5.22 Dur´ee de vie du syst`eme pour les six protocoles compar´es (200 × 200m2).108
5.23 Dissipation moyenne d’´energie du syst`eme pour les six protocoles compa-r´es (200 × 200m2). . . 109
L
ISTE DES TABLEAUX2.1 Synth`ese r´ecapitulative des principaux algorithmes de clustering(1/2) . . . 46
2.2 Synth`ese r´ecapitulative des principaux algorithmes de clustering (2/2) . . 47
3.1 Synth`ese sur les algorithmes de classification spectrale pr´esent´es. . . 63
4.1 Caract´eristiques du mod`ele radio utilis´e dans les simulations . . . 69
5.1 Quantit´e de donn´ees re¸cue par la SB pour les six protocoles ´etudi´es. . . . 105
L
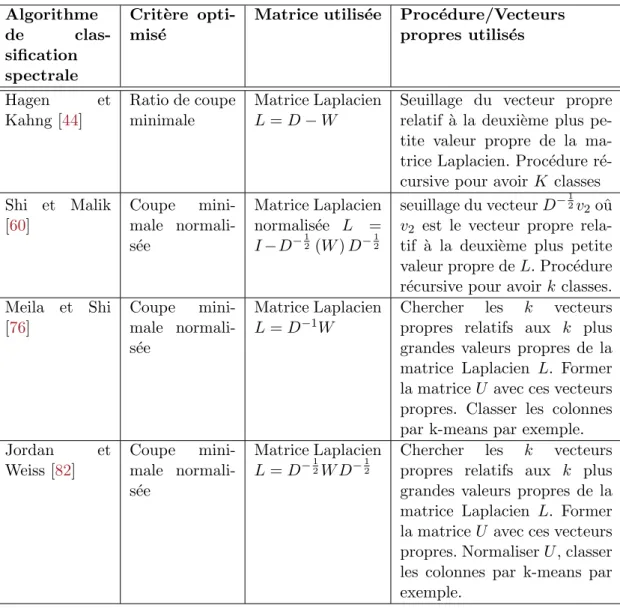
ISTE DES ALGORITHMES3.1 Algorithme de classification spectrale de Hagen et Kahng [44] . . . 60
3.2 Algorithme de classification spectrale de Shi et Malik [60] . . . 60
3.3 Algorithme de classification spectrale de Meila et Shi [76] . . . 61
3.4 Algorithme de classification spectrale de Ng, Jordan et Weiss [82] . . . 62
4.1 Formation des clusters bas´e sur l’algorithme de NJ, Jordan et Weiss . . . 74
4.2 Formation des clusters bas´e sur l’algorithme de Meila et Shi . . . 75
5.1 Algorithme de l’´etape de pr´e-traitement du LESCA . . . 87
5.2 Algorithme de l’´etape de formation des clusters du LESCA . . . 87
5.3 Algorithme de l’´etape d’´election des cluster-heads du LESCA . . . 88
5.4 Algorithme de l’´etape de communication intra-cluster du LESCA . . . 88
5.5 Algorithme de l’´etape de communication inter-clusters du LESCA . . . . 89
5.6 Algorithme de l’´etape de pr´e-traitement du MR-KSCA . . . 92
5.7 Algorithme de l’´etape de formation des clusters du MR-KSCA . . . 92
5.8 Algorithme de l’´etape d’´election des cluster-heads du MR-KSCA . . . 93
5.9 Algorithme de l’´etape de communication intra-cluster du MR-KSCA . . . 93
5.10 Algorithme de l’´etape d’´election du super cluster-head du MR-KSCA . . . 93
5.11 Algorithme de l’´etape de communication inter-clusters du MR-KSCA . . . 94
5.12 Algorithme de l’´etape de pr´e-traitement du MHCA-SC . . . 98
5.13 Algorithme de l’´etape de formation des clusters du MHCA-SC . . . 99
5.14 Algorithme de l’´etape d’´election des cluster-heads du MHCA-SC . . . 99
5.15 Algorithme de l’´etape de communication intra-cluster du MHCA-SC . . . 99
I
NTRODUCTION G´
EN´
ERALEContexte g ´en ´erale et motivation
Au cours des derni`eres ann´ees, nous avons assist´e `a une miniaturisation des compo-sants micro-´electronique, micro-m´ecaniques et de communication (Micro Electro Mecha-nical Systems (MEMS)). Cette tendance `a la miniaturisation a permis `a une nouvelle g´en´eration de r´eseaux informatiques et t´el´ecoms pr´esentant des d´efis important de voir le jour : Les r´eseaux de capteurs sans fil (RCSFs) ou Wireless Sensor Network (WSN). Ces r´eseaux de capteurs sont des r´eseaux sans fil comprenant des petits dispo-sitifs autonomes qui collaborent entres eux pour surveiller une zone d´elimit´ee en vue de d´etecter l’apparition d’un ph´enom`ene donn´e (e.g. apparition de vibrations, d´eplacement lin´eaire, etc.) ou mesurer un ´etat physique comme la pression ou la temp´erature (e.g. d´etection des incendies en forˆets, l’agriculture de pr´ecision, etc.).
Les RCSFs pr´esentent de nombreux avantages qui leurs ont permis un d´ eveloppe-ment rapide dans de multiples domaines. Parmi ces avantages nous citons la facilit´e de d´eploiement, le faible coˆut d’installation, la possibilit´e de distribution sur une vaste r´egion ainsi que l’aptitude d’auto-configuration. Cependant, les RCSFs pr´esentent de nombreux contraintes qui motivent de nombreux chercheurs et qui r´esident principa-lement dans le fait que leurs ressources sont limit´ees en termes de communication, de calculs et d’´energie. En particulier, la contrainte li´ee `a l’´energie est consid´er´ee comme un probl`eme fondamental. En effet, tous les ´el´ements capteurs ont besoin d’´energie pour fonctionner. Ainsi, la maˆıtrise de la consommation d’´energie d’un nœud reste une pro-bl´ematique majeure pour la maximisation de la dur´ee de vie du r´eseau.
La ressource ´energ´etique du nœud capteur est g´en´eralement une batterie. Toutefois, dans la plupart des applications des r´eseaux de capteurs, les nœuds sont d´eploy´es dans des environnements hostiles et il n’est pas pratique de recharger ou de remplacer leurs batteries. De ce fait, la dur´ee de vie globale du r´eseau d´epend compl`etement de celle de la batterie.
En outre, il faut savoir que dans les RCSFs, une large partie de l’´energie est consom-m´ee lorsque les communications sans fil sont ´etablies [50]. Par cons´equent, les commu-nications directes entre les nœuds et la Station de Base (SB) ainsi que les transmissions fr´equentes et de longue distance doivent ˆetre r´eduites au maximum afin de minimiser l’´energie consomm´ee et ainsi prolonger la dur´ee de vie du r´eseau [9].
Parmi les nombreuses solutions existantes pour minimiser efficacement la consomma-tion d’´energie dans les RCSFs, l’une des plus reconnue est l’organisation hi´erarchique du r´eseau en clusters. Chaque cluster est sous la gestion d’un nœud chef appel´e ”Cluster-head (C-H)”. Dans cette organisation, les nœuds d’un cluster envoient leurs donn´ees directement au C-H correspondant. Le C-H collecte les donn´ees des autres nœuds, les agr`ege pour ensuite les transmettre directement `a la SB ou ´eventuellement `a d’autres C-Hs. Ainsi, seuls certains nœuds du RCSF sont amen´es `a transmettre des donn´ees sur une longue distance tandis que le reste devra veiller `a transmettre que sur une courte distance. De cette mani`ere, le clustering favorise une meilleure r´epartition de la consom-mation d’´energie entre les capteurs, car autrement les capteurs ´eloign´es de la SB vont rapidement manquer d’´energie dans le cas d’une transmission directe des donn´ees vers la SB et les capteurs proches de cette derni`ere vont tr`es vite ´epuiser leurs batteries dans le cas d’une transmission des donn´ees par sauts vers la SB. Cela du fait que ces capteurs seront plus sollicit´es pour relayer les donn´ees des autres nœuds[48].
De nombreux protocoles de routage hi´erarchique sont propos´es. Dans ces derniers, les clusters sont form´es p´eriodiquement et les C-Hs s´electionn´es selon une m´etrique sp´ecifique ou une combinaison de m´etriques telles que l’identifiant, le degr´e, l’´energie, la k-densit´e, et la mobilit´e des nœuds. En outre, l’un des protocoles les plus connus est le LEACH[48]. Aussi, plusieurs protocoles de clustering se basant sur le principe de cet algorithme ont vu le jour, tels que LEACH-C[49], EEHC[16], HEED[108], et DECSA[107]. L’id´ee principale du LEACH consiste `a choisir al´eatoirement et `a tour de rˆole les C-Hs pour que la consommation d’´energie soit ´equilibr´ee `a travers tout le r´eseau. Une fois que les C-Hs sont ´elus, la prochaine ´etape consiste `a d´efinir les clusters. Finalement, chaque nœud du RCSF recevra des messages d’avertissement de tous les C-Hs , `a partir du Rapport Signal sur Bruit (RSB) des messages re¸cus. Chaque nœud choisira de se rallier au C-H qui pr´esente la qualit´e de signal la plus ´elev´ee. N´eanmoins, le principal probl`eme du protocole LEACH est la s´election al´eatoire des C-Hs qui ne prend pas en compte l’´energie r´esiduelle des nœuds et la formation des clusters qui suit. En effet, tous les C-Hs peuvent ˆetre localis´es dans une petite r´egion du r´eseau et donc avoir des nœuds qui seront isol´es et n´ecessiteront plus d’´energie pour les donn´ees qu’ils ont capt´ees. Aussi, la plupart des processus de clustering propos´es s’appuient d’abord sur l’´election des C-Hs pour former par la suite les clusters. Cependant, dans ces processus, la r´e´election p´eriodique des C-Hs induit in´evitablement `a une reconfiguration totale du r´eseau, d’o`u une grande surconsommation d’´energie.
Pour rem´edier `a ces probl`emes et avoir des clusters statiques compl`etement disjoints avec des C-Hs correctement r´epartis sur la zone de d´etection, nous proposons de faire appel `a des m´ethodes de classification spectrale.
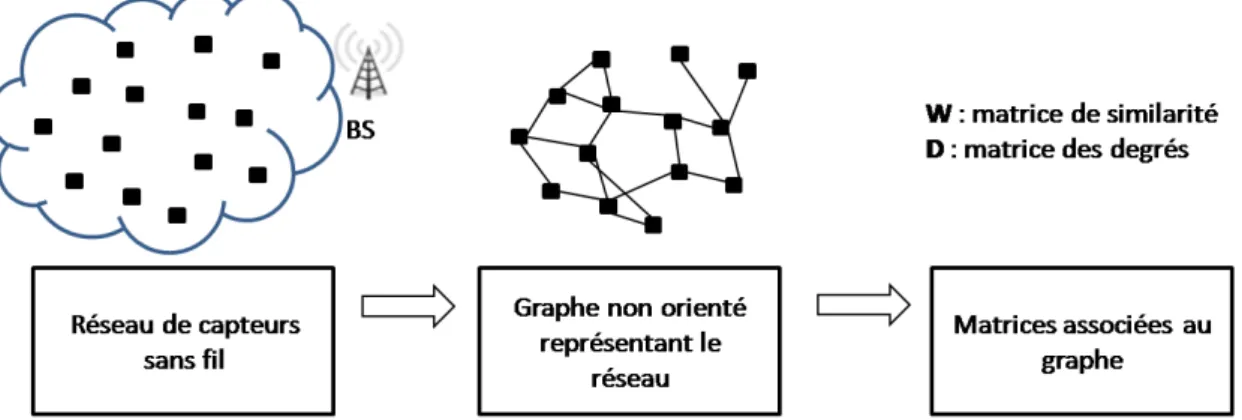
Cette technique de clustering qui est fond´ee sur la th´eorie des graphes, est attrac-tive et facile `a mettre en œuvre. Diff´erents algorithmes de classification spectrale ont ´et´e propos´es et ont donn´e de bon r´esultats dans le traitement d’images et la physique mol´eculaire. Un r´eseau de capteurs peut ˆetre repr´esent´e par un graphe non orient´e o`u les capteurs repr´esentent les sommets, et les liens entre ces capteurs repr´esentent les arˆetes de celui-ci. La classification spectrale inclut une vari´et´e de m´ethodes qui
s’ap-3
puient diff´eremment sur les valeurs propres et les vecteurs propres des matrices associ´ees au graphe pour le partitionner en K clusters. Par ailleurs, on peut distinguer deux types d’approches, une qui divisent les donn´ees en deux clusters uniquement en se basant sur un seul vecteur propre et l’autre qui utilisent plusieurs vecteurs propres et g´en`erent directement un partitionnement K clusters.
Or, plusieurs questions s’imposent : (1) qu’elle est le nombre optimal de clusters `a consid´erer ? (2) Comment proc´eder `a une formation de clusters `a moindre coˆut ´ ener-g´etique ? (3) comment peut-on d´efinir les C-Hs ? (4) Quel mod`ele de communication intra-cluster suivre ? et (5) Comment transmettre les donn´ees du nœud source `a la SB ?
Nous r´epondrons `a toutes ces questions dans ce pr´esent travail. Contributions
Dans ce projet de th`ese, nous nous int´eressons `a la probl´ematique de la consomma-tion d’´energie au niveau des r´eseaux de capteurs sans fil homog`enes. Ainsi, notre ´etude vise `a analyser et mod´eliser le comportement ´energ´etique d’un nœud, `a ´etudier la dis-tribution de l’´energie dans l’ensemble du r´eseau et `a proposer diff´erents protocoles de communication de r´eseaux de capteurs.
L’optimisation ´energ´etique comporte deux aspects :
• Le premier concerne l’organisation hi´erarchique des nœuds du r´eseau. Nous avons fait le choix de concentrer notre ´etude sur l’adaptation des m´ethodes de classifica-tion spectrale `a la formation des clusters. De ce fait, nos premi`eres contributions concernent les processus de clustering [58][53][54][55][56]. Ceux-ci ´evitent la recon-figuration p´eriodique des clusters ; et ce en divisant initialement le r´eseau en un nombre optimal de K clusters ´equilibr´es et disjoints. Ces processus s’appuient sur les propri´et´es suivantes :
1. Organiser les nœuds qui pr´esentent des similarit´es dans un mˆeme cluster `a travers la classification spectrale.
2. D´efinir le nombre optimal que le r´eseau de capteurs peut contenir.
3. Maximiser les communications `a courte distance pour minimiser la consom-mation d’´energie et r´eduire les interf´erences radio.
4. Distribuer uniform´ement les C-Hs dans les diff´erents clusters selon leurs po-sitions g´eographique et leurs ´energies r´esiduelles.
Enfin, un mod`ele de communication intra-cluster est ´etabli dans chaque cluster en s’appuyant sur la technique ”Time Division Multiple Access(TDMA)”.
• Le second repose sur des protocoles de routage hi´erarchique bas´es sur le clustering. Ces derniers doivent assurer un ´echange d’information `a moindre coˆut ´energ´ e-tique. De ce fait, nous proposons de nouveaux protocoles de routage hi´erarchique bas´e sur le clustering d´enot´es Location-Energy Spectral Clustering Algorithm (LESCA)[58], Multi-Relay K-way Spectral Clustering Algorithm (MR-KSCA)[57], et Multi-Hop Clustering Algorithm based on Spectral Classification (MHCA-SC)[59]. Ces protocoles ex´ecutent dans une premi`ere ´etape un processus de clustering et
´
etablissent dans une deuxi`eme ´etape des chemins de routage entres les C-Hs ´elus et la SB. Les communications inter-clusters s’appuieront sur les param`etres suivants : 1. La distance : Chaque C-H utilise ce param`etre pour former le plus court chemin entre lui mˆeme et la SB permettant ainsi d’optimiser la consommation d’´energie.
2. L’´energie : Chaque C-H prend en compte ce param`etre pour ´eviter l’´ epuise-ment rapide de son ´energie. Ainsi, un C-H transmet les paquets vers la SB tout en ´equilibrant progressivement la dissipation d’´energie des autres C-Hs voisins.
Structure de la th `ese
Cette th`ese s’articule autour de cinq chapitres :
• Le premier chapitre de ce manuscrit pr´esente les caract´eristiques et les contraintes li´ees aux RCSFs ainsi que leurs architectures, leurs domaines d’applications et les d´efis relatifs `a leurs conceptions.
• Le deuxi`eme chapitre est une ´etude bibliographique sur les diff´erentes techniques et m´ecanismes de conservation d’´energie que nous avons recens´es dans la litt´ e-rature. Nous poursuivons notre ´etat de l’art par la pr´esentation des diff´erentes approches propos´ees pour organiser un r´eseau en clusters et les protocoles de clus-tering pertinents existant dans les r´eseaux Ad-hoc et de capteurs.
• Dans le troisi`eme chapitre nous pr´esentons quelques notions de la th´eorie des graphes qui nous seront d’une grande utilit´e dans la perception de la classification spectrale. Nous exposerons les principaux algorithmes de classification spectrale existant dans la litt´erature en d´etaillons les points forts et les points faibles de chacun pour pouvoir les comparer et savoir qui sera le plus adapt´e au clustering dans les RCSFs.
• Dans le quatri`eme chapitre, nous exposerons une premi`ere partie de nos contri-butions. Nous proposerons de nouveaux processus de clustering minimisant la consommation d’´energie dans les RCSFs. Ce chapitre commence par d´ecrire les contraintes du clustering et les objectifs d´esir´es des contributions propos´ees avant de les d´ecrires en d´etail.
• Le cinqui`eme chapitre pr´esente les derni`eres contributions qui proposent des proto-coles de routage hi´erarchique bas´es sur la classification spectrale dans les RCSFs, d´enot´es LESCA, MR-KSCA, et MHCA-SC. Dans ce chapitre, nous d´ecrirons le mod`ele des RCSFs et le mod`ele de l’agr´egation de donn´ees utilis´es par nos proto-coles. Par la suite, nous pr´esenterons la phase d’installation et la phase de com-munication des donn´ees des diff´erents protocoles. Enfin, nous ´evaluerons les per-formances des protocoles via des simulations.
Nous terminerons notre travail par une synth`ese g´en´erale dans laquelle nous mettrons en ´evidence les orientations possibles dans les recherches li´ees `a ce domaine et nous donnerons quelques perspectives des travaux futurs. Une liste de r´ef´erences est donn´ee `
Chapitre
1
G´
EN´
ERALIT´
ES SUR LESRCSF
SSommaire
1.1 Introduction . . . 5
1.2 Capteur sans fil : Architecture et caract´eristiques . . . 6
1.2.1 Architecture d’un capteur sans fil . . . 7
1.2.2 Caract´eristiques d’un capteur sans fil . . . 8
1.3 RCSFs : Contraintes et caract´eristiques . . . 10
1.3.1 Facteurs influen¸cant la conception des RCSFs . . . 10
1.3.2 Architectures adopt´ees pour les RCSFs . . . 12
1.3.3 Les d´efis des RCSFs . . . 14
1.4 Domaines d’application des RCSFs . . . 16
1.4.1 Applications militaires . . . 16 1.4.2 Applications environnementales . . . 17 1.4.3 Applications m´edicales . . . 17 1.4.4 Applications industrielles . . . 18 1.5 Verrous scientifiques . . . 18 1.6 Conclusion . . . 19 1.1 Introduction
Les progr`es technologiques r´ealis´es ces derni`eres d´ecennies ont permis le d´ eveloppe-ment d’une nouvelle g´en´eration de r´eseaux informatiques et t´el´ecoms : Les R´eseaux de Capteurs Sans Fil (RCSF). Ces r´eseaux sont dot´es de moyens de communication sans fil, peu on´ereux, et peuvent ˆetre configur´es pour former des r´eseaux autonomes. En effet, ils sont g´en´eralement compos´es de nombreux nœuds r´epartis dans une zone (i.e. zone de couverture) et reli´es `a une ou plusieurs passerelles (i.e. station de base) qui permettent l’interconnexion avec d’autres r´eseaux (e.g Internet, satellite) (figure 1.1) [6].
Cependant ce type de r´eseaux pr´esente un grand d´efi : L’´energie. Cela vient du fait que les capteurs sont souvent ´equip´es de batteries non rechargeables. Ainsi on cherchera principalement dans ces r´eseaux `a minimiser l’´energie consomm´ee sans que cela n’ait de r´epercussions sur la r´ealisation des tˆaches souhait´ees par le r´eseau.
Figure 1.1 – Architecture d’un r´eseau de capteurs sans fil
Il suffit de regarder autour de nous pour trouver plusieurs exemples d’applications des capteurs dans tous les domaines : Dans les machines `a laver, les ascenseurs, les voitures ou les t´el´ephones mobiles etc. L’int´egration des capteurs dans de nombreux objets qui sont largement utilis´es dans notre vie quotidienne est en pleine essor.
Un capteur peut ˆetre d´efini comme un appareil qui collecte une mesure quantita-tive correspondante `a une propri´et´e physique. Il existe par exemple de simples capteurs qui captent des donn´ees relatives `a la position, la vitesse, la pression, la d´etection de mouvement, la lumi`ere et la temp´erature ainsi que des capteurs complexes tels que ceux r´eserv´es `a la capture de sons ou d’images qui sont aussi tr`es largement utilis´es [63]. Avec l’int´egration de capteurs dans les syst`emes embarqu´es, le domaine d’applications des capteurs s’est ´elargi. Les syst`emes embarqu´es sont des syst`emes int´egr´es qui per-mettent des fonctionnalit´es sp´ecifiques pour effectuer des tˆaches tr`es sp´ecifiques. Le mot que l’on utilise dans le manuscrit est «nœud capteur» par r´ef´erence au terme anglais «sensor node» qui revient fr´equemment dans la litt´erature. Toutefois, nous pouvons utiliser d’autres appellations telles que «mote» ou seulement «capteur», ce qui revient finalement `a la mˆeme chose.
Dans ce chapitre, nous pr´esenterons d’une part, l’architecture mat´erielle et les carac-t´eristiques d’un capteur sans fil, les sp´ecificit´es et la conception des RCSFs, ainsi que les diff´erents domaines d’application de ce type de r´eseau. D’autre part, nous pr´esenterons les probl´ematiques li´ees aux RCSFs et les voies de recherches qu’ils proposent.
1.2 Capteur sans fil : Architecture et caract ´eristiques
Dans cette section, nous pr´esenterons l’architecture mat´erielle et les caract´eristiques d’un capteur sans fil.
1.2. CAPTEUR SANS FIL : ARCHITECTURE ET CARACT ´ERISTIQUES 7
Figure 1.2 – Les composantes d’un capteur sans fils
1.2.1 Architecture d’un capteur sans fil
Un capteur sans fil est un petit dispositif ´electronique capable de mesurer ou de d´ e-tecter un ´ev´enement r´eel (e.g. temp´erature, lumi`ere, pression, etc.), et de le communiquer `
a un centre de traitement appel´e station de base[6]. Comme l’illustre la figure 1.2, un capteur est essentiellement compos´e de quatre unit´es de base : une unit´e d’acquisition, une unit´e de traitement, une unit´e de communication, et une source d’´energie. Il peut aussi ˆetre dot´e selon l’application d’autres composants additionnels comme un syst`eme de localisation, un g´en´erateur de puissance ou bien un mobilisateur [27].
• L’unit´e d’acquisition : Elle est g´en´eralement compos´ee des deux sous-unit´es : (i) un capteur et (ii) un Convertisseur Analogique Num´erique (CAN). Le CAN convertit les signaux ´electriques analogiques produits par les capteurs selon le ph´enom`ene physique observ´e en signaux num´eriques afin d’ˆetre utilis´es par l’unit´e de traitement [8].
• L’unit´e de traitement : Elle est compos´ee d’un processeur et d’une petite m´ e-moire de stockage. Cette unit´e dispose de deux interfaces, une interface avec l’unit´e d’acquisition et une autre avec l’unit´e de communication. Elle acqui`ere les infor-mations de l’unit´e d’acquisition et les envoi `a l’unit´e de communication. Cette unit´e est ´egalement charg´ee d’ex´ecuter les protocoles de communication qui per-mettent `a un capteur de collaborer avec d’autres capteurs pour r´ealiser les tˆaches d’acquisition.
• L’unit´e de transmission : Cette unit´e est responsable de toutes transmissions et r´eceptions de donn´ees `a travers un support de communication radio qui relie le nœud au r´eseau. La consommation ´energ´etique de l’unit´e de transmission est de l’ordre de 20mW et sa port´ee est de quelques dizaines de m`etres.
l’ensemble de ses composants. Toutefois, en raison de sa petite taille, la source d’´energie est limit´ee et g´en´eralement irrempla¸cable. Pour cela, l’´energie est la res-source la plus pr´ecieuse, car elle affecte directement la dur´ee de vie des capteurs. Ainsi, cette unit´e est l’une des composantes les plus importantes d’un capteur. A titre indicatif, la source d’´energie du capteur sera souvent une pile AA normale d’environ 2.2 − 2.5 Ah fonctionnant `a 1.5 V [63].
Il existe d’autres sous-unit´es qui d´ependent de l’application choisie. La plupart des tech-niques de routage et de clustering dans les RCSFs exigent une localisation au pr´ealable avec une grande pr´ecision. Ainsi, un capteur est souvent ´equip´e d’un syst`eme de locali-sation, ¸ca peut ˆetre soit un ”Global Positioning System (GPS)” ou tout autre dispositif de localisation [5], [80], [75].
Les capteurs peuvent aussi avoir besoin de mobilisateurs pour mener `a bien les tˆaches qui leurs sont assign´ees, car ceux-ci leurs permettront de se d´eplacer.
Enfin, il est n´ecessaire qu’un capteur soit maintenu en marche pendant une tr`es longue p´eriode, une source externe telle que les cellules solaires serait d’une grande utilit´e pour maintenir le capteur en marche sans avoir `a lui changer de batterie.
1.2.2 Caract ´eristiques d’un capteur sans fil
Dans un capteur, pour garantir les tˆaches qui lui sont assign´ees, deux unit´es fonda-mentales sont n´ecessaires : l’unit´e d’acquisition qui capte les mesures physiques et l’unit´e de communication qui transmet les donn´ees mesur´ees vers d’autres dispositifs ´ electro-nique et assure la collaboration entre les nœuds du r´eseau. En outre, chaque capteur a un rayon de communication et de d´etection, la zone de communication regroupe les capteurs avec lesquels il peut communiquer, tandis que la zone de d´etection est l’es-pace o`u le capteur peut d´etecter un ´ev´enement. En effet, pour communiquer, plus le rayon de communication est grand, plus la puissance du signal g´en´er´e par le support de communication radio augmente et donc la quantit´e d’´energie consomm´ee serait plus importante.
Par ailleurs, l’´economie d’´energie est une des probl´ematiques majeures des capteurs. En effet, la recharge des sources d’´energie est souvent trop coˆuteuse et parfois impos-sible. Il faut donc que les capteurs ´economisent au maximum l’´energie avant de pouvoir fonctionner. On peut distinguer deux formes de dissipation d’´energie, une utile et l’autre inutile [48] :
Une consommation utile d’´energie due `a :
• La transmission et la r´eception des donn´ees. • Le traitement des donn´ees.
• L’ex´ecution de requˆetes pour l’acheminement de donn´ees aux nœuds voisins. Une consommation inutile d’´energie due `a :
• Les collisions qui se produisent quand deux paquets sont ´emis en mˆeme temps et se heurtent, ils deviennent par la suite inexploitables et doivent alors ˆetre abandonn´es. • L’´ecoute `a vide (i.e. ”idle listening”) qu’on rencontre quand un nœuds qui est dans l’´etat prˆet `a recevoir un paquet, mais qui n’est pas actuellement en train de
1.2. CAPTEUR SANS FIL : ARCHITECTURE ET CARACT ´ERISTIQUES 9
Figure 1.3 – Exemple de nœud capteur sans fil. Ici, un nœud de la soci´et´e Coronis [1], groupe Elster.
Figure 1.4 – Chronologie des plate-formes de capteurs [7]
recevoir quoi que ce soit.
• L’´ecoute abusive (i.e. ”overhearing”) qu’on distingue quand un nœud re¸coit les donn´ees qui ne lui sont pas destiner.
• Le ”overmitting” qu’on peut trouver quant un nœud envoi des donn´ees sans que le destinataire ne soit prˆet `a les recevoir.
• ”L’overhead” des paquets de contrˆole.
En revanche, lorsque nous analysons les capteurs existants dans le march´e et les pro-totypes pr´esent´es dans la litt´erature, il est ´evidant que les capteurs se caract´erisent essentiellement par leurs petites tailles et par leurs capacit´es d’auto-configuration et d’auto-organisation. G´en´eralement, les diff´erentes unit´es des capteurs sont limit´ees en termes de ressources. Ainsi, leurs consommation d’´energie doit ˆetre extrˆemement faible pour que leurs dur´ee de vie soit la plus grande possible.
Il existe plusieurs fabricants de capteurs dans le monde tels que Crossbow [2], Eu-roTherm [3], Coronis [1] (illustr´e sur la figure1.3), et Sens2B [4]. Une chronologie de ces plate-formes est l’objet de la figure1.4.
1.3 RCSFs : Contraintes et caract ´eristiques
Un RCSF est compos´e d’un grand nombre de nœuds capteurs qui sont d´eploy´es `a forte densit´e en dedans du ph´enom`ene surveill´e ou `a proximit´e de celui-ci. Les positions des nœuds de capteurs ne doivent pas forcement ˆetre pr´e-d´etermin´ees. Cette caract´ e-ristique unique permet aux RCSFs d’ˆetre d´eploy´es dans les terrains inaccessibles. En outres, cela signifie aussi que les protocoles et les algorithmes d´edi´es aux r´eseaux de capteurs doivent poss´eder des capacit´es d’auto-organisation. Une autre caract´eristique importante des r´eseaux de capteurs est la capacit´e de coop´eration des nœuds de cap-teurs. En effet, les nœuds de capteurs sont ´equip´es de processeurs embarqu´es qui leurs permettent d’effectuer des traitement locaux des donn´ees et des calculs simples. Ainsi, ils ne transmettent que les donn´ees requises et partiellement transform´ees. Par cons´equent, les r´eseaux de capteurs fourniront `a l’utilisateur final une meilleure compr´ehension de l’environnement. Nous pr´evoyons que, `a l’avenir, les RCSFs feront partie int´egrante de nos vies, plus que les ordinateurs personnels actuels.
Les quelques caract´eristiques d´ecrites ci-dessus assurent une large gamme d’applica-tions pour les r´eseaux de capteurs. Certains des domaines d’application sont la m´edecine, l’environnement, et la s´ecurit´e.
Dans ce contexte, les RCSFs sont souvent consid´er´es comme ´etant les successeurs des r´eseaux Ad-hoc (figure1.5). En effet, les RCSF partagent avec les r´eseaux Ad-hoc plusieurs propri´et´es en commun, telles que l’absence d’infrastructure et les communica-tions sans fil [87]. Bien que de nombreux protocoles et algorithmes ont ´et´e propos´es pour les r´eseaux Ad-hoc sans fil, ils ne sont pas bien adapt´es pour les caract´eristiques uniques et les exigences des r´eseaux de capteurs. Pour illustrer ce point, les diff´erences entre les r´eseaux de capteurs et les r´eseaux Ad-hoc sont d´ecrites ci-dessous :
• Dans les r´eseaux de capteurs, les nœuds sont d´eploy´es en grand nombre. • Les nœuds de capteurs sont sujets `a des d´efaillances.
• La topologie des r´eseaux de capteurs change tr`es fr´equemment.
• Les r´eseaux de capteurs utilisent principalement le paradigme de communication broadcast tandis que les r´eseaux ad hoc sont bas´es sur le paradigme de communi-cation point-`a point.
• Les capteurs sont limit´es en ´energie, en capacit´es de calcul, et en m´emoire. • Les r´eseaux ad-hoc se focalisent plus sur la qualit´e de service que sur la
consom-mation de l’´energie.
1.3.1 Facteurs influenc¸ ant la conception des RCSFs
La conception des r´eseaux de capteurs est influenc´ee par de nombreux facteurs comme par exemple le nombre de nœuds et leurs d´eploiement, la tol´erance aux pannes, la mobilit´e des nœuds, ainsi que des ressources des nœuds [8]. C’est en prenant compte de ces diff´erents facteurs que sont con¸cus les protocoles et les algorithmes d´edi´es aux RCSFs.
1.3. RCSFS : CONTRAINTES ET CARACT ´ERISTIQUES 11
Figure 1.5 – Classification des r´eseaux de communication
en grand nombre ; ce nombre peut aller jusqu’`a milles ou plus.
• L’auto-configuration des nœuds capteurs : Le d´eploiement des nœud dans les r´eseaux de capteurs d´epend essentiellement de leurs application. Cependant, les capteurs sont souvent d´eploy´es al´eatoirement dans des environnements hostiles. Ainsi, un nœud capteur doit avoir des capacit´es pour s’auto-configurer dans le r´eseau d’une part, et d’autre part pour collaborer avec les autres nœuds dans le but de reconfigurer d’une fa¸con dynamique le r´eseau en cas de changement de la topologie du r´eseau.
• La tol´erance aux pannes : Les protocoles con¸cus pour les r´eseaux de capteurs doivent tenir compte du fait qu’un nœud peut ne plus fonctionner par manque d’´energie ou parce qu’il a ´et´e d´etruit. Ils devront adapter leurs niveau de tol´erance aux pannes en fonction du milieu dans lequel est d´eploy´e le r´eseau.
• La mobilit´e des nœuds : Bien que la plupart des architectures des r´eseaux de capteurs supposent que les nœuds gardent leurs positions de d´epart, la mobilit´e des nœuds doit ˆetre prise en compte dans certaines applications. Cette mobilit´e rendra la topologie du r´eseau dynamique. il faut donc que les capteurs soient capables d’adapter leur fonctionnement afin de maintenir la topologie souhait´ee.
• L’h´et´erog´en´eit´e des nœuds : Dans un r´eseaux de capteurs, certains nœuds peuvent avoir de puissantes capacit´es de traitement, d’autres peuvent ˆetre ´equip´es avec des GPS ; ou encore agir comme des passerelles vers les r´eseaux de longue port´ee (e.g. les r´eseaux cellulaire, les Satellites, et Internet). Il faut noter que la SB a une puissance de stockage et des capacit´es de traitement largement sup´erieures `
a tous les autres nœuds du r´eseaux. Ainsi, le degr´e d’h´et´erog´en´eit´e aide `a d´ecider de la r´epartition des charges entre les nœuds de capteurs.
o`u sont d´eploy´es les nœuds de capteurs. En effet, la couverture peut ˆetre partielle (i.e. recouvrant une partie seulement de la zone d’int´erˆet), dense (i.e. recouvrant toute la zone d’int´erˆet) ou redondante (i.e. plusieurs capteurs recouvrant le mˆeme emplacement physique). Par cons´equent, la couverture d´epend de la pr´ecision de l’observation et de la n´ecessit´e de redondance.
• La s´ecurit´e et la confidentialit´e : Le d´eploiement de nœuds de capteurs se fait parfois dans des zones accessibles. Ainsi, ces nœuds risquent de rencontrer des per-turbations techniques ou des intrusions par des tiers, ce qui peux conduire `a des probl`emes de s´ecurit´e et de confidentialit´e. Pour faire face `a ces risques et prot´ e-ger l’ensemble du r´eseau des diverses attaques, il est n´ecessaire de concevoir des algorithmes robustes pour le cryptage des donn´ees et des m´ecanismes d’authenti-fication pour la protection de la vie priv´ee [43].
• L’´energie et autres ressources des nœuds : La caract´eristique la plus critique des capteurs est qu’il sont limit´es en termes d’´energie, de capacit´e de stockage et de puissance de calcul. En particulier, la recharge des sources d’´energie est souvent trop coˆuteuse et parfois impossible. Pour prolonger la dur´ee de vie de l’ensemble du r´eseau le nœud doit consommer efficacement son ´energie.
1.3.2 Architectures adopt ´ees pour les RCSFs
Un r´eseau de capteurs est g´en´eralement compos´e de nombreux nœuds de capteur d´eploy´es dans une zone. Ces nœuds sont reli´es `a une ou `a plusieurs passerelles qui per-mettent l’interconnexion avec d’autres r´eseaux et la r´ecup´eration des donn´ees. L’utilisa-teur du RCSF peut ainsi, par le biais de la SB, adresser des requˆetes aux autres nœuds capteurs du r´eseau en pr´ecisant le type de donn´ees requises et recueillir puis analyser les ´ev´enements recens´es par les capteurs sur la zone de couverture.
Les architectures dans les r´eseaux de capteurs d´ependent essentiellement des appli-cations et des techniques utilis´ees pour faire acheminer l’information des capteurs `a la SB. Ce processus d’acheminement de l’information des capteurs vers la SB peut se faire selon deux formes :
• Une architecture `a plat o`u les capteurs peuvent communiquer directement avec la SB (figure1.6), ou en mode multi-sauts (figure1.7).
1.3. RCSFS : CONTRAINTES ET CARACT ´ERISTIQUES 13
Figure 1.6 – Transmission directe
Figure 1.7 – Transmission en multi sauts
• Une architecture hi´erarchis´ee qui consiste `a regrouper les capteurs en groupes appel´es clusters qui seront repr´esent´es par des C-Hs responsables de transmettre directement les donn´ees `a la SB (figure1.8).
Figure 1.8 – Clustering
Il faut dire que l’architecture adopt´ee conditionne la r´epartition de la consommation d’´energie dans le r´eseau. En effet, dans le cas d’une transmission directe des donn´ees capt´ees vers la SB, les capteurs ´eloign´es de celle-ci vont plus rapidement manqu´e d’´ ener-gie. Tandis que pour la transmission des donn´ees capt´ees par sauts, les capteurs proches de la SB vont ˆetre vite manquer d’´energie car ils seront plus sollicit´es pour relayer les messages des autres. Au contraire, pour les architectures hi´erarchis´ees, en changeant r´ e-guli`erement les clusters-head on obtient des r´eseaux o`u la consommation d’´energie est r´epartie ´equitablement.
1.3.3 Les d ´efis des RCSFs
Les RCSFs font objet actuellement d’une grande attention en raison de leurs po-tentiels illimit´es. Toutefois, nous pr´esentons ici les d´efis cl´es de la recherche pour les RCSFs.
• Le coˆut de production :
Dans ce domaine d’important progr`es ont ´et´e r´ealis´es dans la miniaturisation des capteurs et dans la conception de composantes int´egr´ees ´economes en ´energie. Ainsi, ces progr`es ont permis d’avoir des capteurs de taille microscopique voire mˆeme nanoscopique avec une batterie robuste int´egrante des mat´eriaux innovant. • La tol´erance aux pannes :
Certains capteurs peuvent `a tout moment tomb´es en panne, cela peut ˆetre dˆu `
a un manque d’´energie ou des dommages physiques. Ces dis-fonctionnements de certains capteurs ne devraient pas affecter la tˆache premi`ere du r´eseau. Pour cela, il faut ´evaluer au pr´ealable la capacit´e du r´eseau `a fonctionner sans interruption. • L’auto-configuration :
Vu que les r´eseaux de capteurs sont d´eploy´es al´eatoirement dans des environne-ments souvent hostiles, l’intervention de l’ˆetre humain n’est pas permise pour
as-1.3. RCSFS : CONTRAINTES ET CARACT ´ERISTIQUES 15
surer leurs organisations. De ce fait, ces r´eseaux doivent pouvoir s’auto-configurer pour assurer un bon fonctionnement sans interruption.
• Le passage `a l’´echelle :
Dans la majorit´e des applications des r´eseaux de capteurs, les capteurs sont souvent d´eploy´es en grand nombre, de ce fait, les protocoles et les algorithmes propos´es doivent prendre en consid´eration cela. Ainsi, le nombre de capteurs ne doit pas avoir d’effet sur leurs performances.
• L’agr´egation des donn´ees :
Dans le processus de la capture ou de la transmission des donn´ees, certains cap-teurs peuvent g´en´erer des donn´ees redondantes. Ainsi, des paquets similaires de plusieurs nœuds peuvent ˆetre regroup´es en un seul paquet de sorte que le nombre de transmissions soit r´eduit. L’agr´egation des donn´ees consiste donc `a combiner les donn´ees provenant de diff´erents nœuds. Cette technique permettra une consom-mation efficace de l’´energie et une optimisation des transferts des donn´ees. • La transmission des donn´ees :
Dans un r´eseau de capteurs, les communications entre les nœuds se font `a travers un support sans fil. Or, on connaˆıt les probl`emes li´es `a un canal de communication sans fil (e.g. att´enuation du signal, taux d’erreurs ´elev´es). Ces probl`emes peuvent ´egalement affect´es l’exploitation des r´eseaux de capteurs.
• La qualit´e de service :
Dans certaines applications, les donn´ees capt´ees par les nœuds doivent ˆetre trans-mises directement apr`es un certain laps de temps du moment o`u elles ont ´et´e d´etect´ees, sinon elles ne seront plus fiables et donc inutilisables. Par cons´equent, la latence pour la transmission des donn´ees est une autre contrainte pour les applications limit´ees en temps. Cependant, dans la plupart des applications, la conservation de l’´energie, qui est directement li´ee `a la dur´ee de vie du r´eseau re-cueille plus d’importance que la qualit´e des donn´ees transmises. Comme l’´energie est limit´ee dans les capteurs, la qualit´e des r´esultats dans les r´eseaux de capteurs peut ˆetre r´eduite pour r´eduire la consommation d’´energie dans les capteurs et donc prolonger la dur´ee de vie totale du r´eseau. Il faut donc trouver le meilleur compromis entre la consommation d’´energie et la qualit´e des donn´ees transmises [9].
• L’´energie :
L’´energie est consid´er´ee comme la ressource la plus pr´ecieuse dans les RCSFs ´etant donn´e que ces capteurs sont ´equip´es de batteries, qui sont difficiles voire mˆeme impossible `a recharger. En consommant efficacement cette ´energie, la dur´ee de vie d’un r´eseau de capteurs peut ˆetre prolong´ee. Cela peut se faire par l’application conjointe de diff´erentes techniques [12], comme l’ordonnancement d’activit´es qui consiste `a ´eteindre les ´equipement de certains capteurs et permettre seulement aux capteurs disposant de plus d’´energie de transmettre les donn´ees capt´ees `a la SB.
Figure 1.9 – Les domaines d’applications des r´eseaux de capteurs sans fil
1.4 Domaines d’application des RCSFs
Les r´eseaux de capteurs peuvent ˆetre constitu´es de diff´erents types de capteurs qui sont en mesure de contrˆoler ou de superviser plusieurs vari´et´es de param`etres environ-nementaux. On trouve parmi ceux-l`a, la temp´erature, l’humidit´e, la pression, le niveau de bruit, le mouvement d’objets et la composition des sols [8].
Le concept de la communication sans fil et de la miniaturisation des capteurs leurs permettent de conqu´erir plusieurs domaines d’applications. Les domaines o`u les r´eseaux de capteurs se r´ev`elent ˆetre tr`es utiles et offrent de meilleures contributions sont r´ eper-tori´es dans la figure1.9.
Nous d´ecrivons par la suite quelques applications dans certains domaines pour donner une id´ee des utilisations des capteurs sans fil.
1.4.1 Applications militaires
Les RCSFs peuvent ˆetre partie int´egrante des syst`emes militaires C4ISRT (Com-mande, Contrˆole, Communications, Ordinateurs, Intelligence, Surveillance, Reconnais-sance, et Suivi) de par leurs facilit´e de d´eploiement, leurs auto-organisation ainsi que leurs tol´erance aux pannes [34]. De plus, la destruction de certains capteurs par des op´erations hostiles n’affectera pas une op´eration militaire vu que les r´eseaux de capteurs sont caract´eris´es par un d´eploiement dense. Ci-dessus quelques exemples d’applications des r´eseaux de capteurs dans le domaine militaire.
1.4. DOMAINES D’APPLICATION DES RCSFS 17
• Suivi des forces alli´ees : Les forces arm´ees peuvent surveiller en permanence l’´etat de leurs troupes, leurs disponibilit´es ainsi que l’´etat de leurs munitions par l’utilisation des RCSFs. En effet, de petits capteurs peuvent ˆetre int´egr´es dans n’importe quels ´equipements militaires. Ces capteurs rapporteront l’´etat de ces ´equipements `a la base de commandement des arm´ees.
• Surveillance des champs de batailles : Les r´eseaux de capteurs peuvent ˆetre d´eploy´es dans des zones strat´egiques ou hostiles, afin de surveiller les mouvements des forces ennemies ou d’analyser le terrain avant d’y envoyer des troupes (e.g. d´etection des armes chimiques et biologiques ou des radiations).
• Traques des cibles : Les r´eseaux de capteurs peuvent ˆetre incorpor´es dans les syst`emes de guidage des missiles, ce qui permettra d’atteindre les cibles choisies avec une tr`es grande pr´ecision.
1.4.2 Applications environnementales
Le contrˆole des param`etres environnementaux par les r´eseaux de capteurs a don-ner naissance `a plusieurs applications dans le domaine environnementale [69]. Ci-dessus quelques exemples d’applications des r´eseaux de capteurs dans ce domaine :
• D´etection de feu de forets : Les r´eseaux de capteurs peuvent ˆetre d´eploy´es al´eatoirement et avec une grande densit´e dans les forˆets. Ils peuvent aider `a d´ e-tecter un ´eventuel d´ebut de feu ainsi que son origine. Ceci facilitera la lutte contre les feux de forˆet avant leur propagation [13].
• Agriculture : Les r´eseaux de capteurs peuvent ˆetre utilis´es pour surveiller le niveau de production [28], le niveau de pesticides dans l’eau potable, le niveau de l’´erosion des sols, et le niveau de pollution de l’air en temps r´eel. Ce qui permet aux champs agricoles de r´eagir convenablement aux changements climatiques. • D´ecouverte des catastrophes naturelles : Vu que les capteurs peuvent ˆetre
d´eploy´es n’importe o`u dans la nature, ils peuvent signaler ou pr´edire des catas-trophes naturelles tels que les tremblements de terre, les tempˆetes ou les ouragans ainsi que les inondations. Cela permettra une intervention beaucoup plus rapide et plus efficaces des secours.
1.4.3 Applications m ´edicales
Dans le domaine de la m´edecine, les r´eseaux de capteurs peuvent ˆetre utilis´es pour le suivi des patients ainsi que leurs diagnostics vitaux [70]. Ci-dessus quelques exemples d’applications des r´eseaux de capteurs dans ce domaine :
• Suivi et contrˆole des m´edecins et des patients dans un hˆopital : Pour as-surer une surveillance permanente des organes vitaux des patients, des micro-capteurs leurs seront rattach´es. Ces capteurs auront chacun une tˆache bien par-ticuli`ere. Ils peuvent par exemple diagnostiquer quelques maladies en effectuant des mesures physiologiques telles que la tension art´erielle et le battement du cœur. Aussi, pour un m´edecin les capteurs peuvent ˆetre d’une grande utilit´es, ils per-mettront aux autres m´edecins de le localiser au sein de l’hˆopital.
• L’administration de m´edicaments dans les hˆopitaux : Int´egrer aux patients des capteurs qui permettent d’identifier leurs allergies et les m´edicaments qui leur seront n´ecessaires, rendent la possibilit´e de prescrire le mauvais m´edicament `a ces patients tr`es minime.
1.4.4 Applications industrielles
Dans le domaine industriel, des capteurs ou des actionneurs peuvent ˆetre utilis´es pour les processus de suivi et de contrˆole [96][77]. Par exemple, dans une usine de traitement `a plusieurs ´etapes, il peut y avoir des capteurs plac´es en diff´erents points dans le processus afin de surveiller par exemple la temp´erature, la concentration chimique, et la pression [43].
1.5 Verrous scientifiques
De nombreux probl`emes ont ´et´e pos´es par les RCSFs au cours des nombreux re-cherches dans les diff´erents domaines d’applications de ces r´eseaux [8][9]. Nous r´esumons, ci-dessous, les probl´ematiques les plus importantes de ce type de r´eseaux :
• L’´energie : Comme nous l’avons indiqu´e auparavant, l’´energie est une ressource qui est consid´er´ee comme limit´ee dans les applications des RCSFs, car dans la plupart des cas les capteurs utilisent des batteries non rechargeables et n’int`egrent pas de m´ecanisme de production d’´energie. Et comme le changement de batteries est difficile voire mˆeme impossible, il est imp´erative de trouver une strat´egie pour g´erer correctement l’utilisation de l’´energie disponible.
• L’environnement de communication : Pour le d´eploiement d’un RCSF, il est coutumier de faire appel aux avions pour larguer en masse les capteurs dans la nature. Dans ce cas, le positionnement des capteurs ne sera pas contrˆol´e. Il s’en-suit qu’on peut avoir un isolement de certains nœuds (e.g. un nœud est positionn´e en dehors de la zone de couverture des autres nœuds) seulement parce qu’ils sont trop loin, ou parce qu’ils sont tomb´es dans des endroits qui font obstacle `a la pro-pagation des ondes radio ou simplement parce qu’ils ont ´et´e d´etruits. Les signaux envoy´es par les nœuds peuvent alors ˆetre gravement endommag´es et la connectivit´e du r´eseau sera un probl`eme difficile `a v´erifier.
• La topologie du r´eseau : La topologie des RCSF peut ˆetre sujette `a de nom-breux changement. Ce changement de topologie peut se produire lorsque des nœuds sont ajout´es ou retir´es : par l’action directe de l’utilisateur, par changement de l’´etat (actif / veille), par ´epuisement d’´energie, par dis-fonctionnement ou dˆu `a la mobilit´e des nœuds dans le cas o`u ils ne sont pas fixes. Les capteurs doivent ˆ
etre capables de s’auto-organis´es pour faire face aux changements al´eatoires de la topologie du r´eseau.
• La densit´e du r´eseau : Comme on l’a vu pr´ec´edemment, les RCSFs se caract´ e-risent par une densit´e de d´eploiement. En effet, un r´eseau peut compter plusieurs de nœuds. Cette densit´e ´elev´ee peut causer une congestion lorsque les nœuds
es-1.6. CONCLUSION 19
sayeront de communiquer en mˆeme temps.
En outre, la plupart des solutions propos´ees pour les communications inter-clusters et intra-clusters dans les r´eseaux de capteurs s’appuient soit sur une vue `a plat (i.e.tous les nœuds sont consid´er´es comme ´egaux et doivent contribuer ensemble `a la gestion du r´eseau pour qu’ils puissent accomplir ses tˆaches) ou bien sur une vue hi´erarchis´ee appel´ee aussi clustering (i.e. les capteurs proches g´eographiquement sont regroup´es en clusters). Des sch´emas de routage diff´erents sont utilis´es au sein des clusters et entre les clusters. Ainsi, un nœud au sein d’un cluster stocke la totalit´e des informations des capteurs qui font partie de son cluster et seulement une partie des informations qui concernent les autres clusters. Dans cette architecture, seulement les C-Hs et les nœuds passerelles sont responsables de l’acheminement de l’information capt´ee par un capteur `a la SB.
Par ailleurs, les capteurs peuvent tomber en panne `a tout moment (e.g par extinc-tion de leur radio, ´epuisement de leur ´energie ou un dysfonctionnement mat´erielle), ou peuvent se d´eplacer ind´ependamment les uns des autres. Ainsi, la topologie du r´eseau est en constante ´evolution. De ce fait, l’acheminement de l’information d’un capteur `a une SB distante, et vice versa, doit se faire par un protocole efficace en ´energie.
Dans cette th`ese, nous proposons des m´ethodes de clustering des r´eseaux de cap-teurs inspir´ees d’algorithmes de classification spectrale qui se basent sur des notions de th´eorie des graphes. Ces algorithmes ont connu un grand succ`es dans de nombreux do-maines comme celui de la segmentation d’images. Ces algorithmes seront aussi la base des protocoles de communications que nous proposerons.
Afin qu’un protocole soit efficace, il devra prendre en consid´eration les contraintes intrins`eques du r´eseau, les ressources limit´ees des capteurs en termes de calcul, de sto-ckage et d’´energie, ainsi que le mode de gestion du m´edium de communication partag´e (i.e. bande passante limit´ee, collisions, etc.).
1.6 Conclusion
Dans ce chapitre nous avons proc´ed´e `a la pr´esentation des RCSFs. Nous avons d´ e-crit les caract´eristiques et l’architecture d’un capteur. Nous avons aussi mentionn´e les caract´eristiques d’un r´eseau de capteurs et nous avons pr´esent´e leurs architectures ainsi que quelques domaines d’applications comme par exemple le domaine militaire et m´ edi-cal. Nous avons ´egalement pr´esent´e les principaux d´efis et les axes de recherche li´es aux r´eseaux de capteurs.
A travers cela, nous avons remarqu´e que plusieurs facteurs et contraintes faussent la route au d´eveloppement de ces r´eseaux. En effet, leurs capacit´e ´energ´etique limit´ee rend l’optimisation de la consommation d’´energie dans ces r´eseaux l’un des objectifs les plus discut´es et les plus critiques en vue de prolonger la dur´ee de vie du r´eseau.
Dans la suite, nous proposerons des processus de clustering qui permettront : (i) de diviser le r´eseau de capteurs en un nombre optimal de clusters locaux, disjoints et ´
equilibr´es ; (ii) d’´elire un C-H pour chaque cluster ; et (iii) de cr´eer des mod`eles de communication intra-cluster et inter-cluster en vue d’optimiser la dur´ee de vie du r´eseau.
Chapitre
2
O
PTIMISATION D’´
ENERGIE DANS LESRCSF
S- E
TAT DE L’
AR T-Sommaire
2.1 Introduction . . . 22
2.2 Approches g´en´erales de conservation de l’´energie . . . 23
2.2.1 Duty-cycling . . . 25
2.2.1.1 Le contrˆole de la topologie . . . 26
2.2.1.2 La gestion de puissance . . . 27
2.2.2 Techniques orient´ees donn´ees . . . 29
2.2.2.1 Clustering . . . 30
2.2.2.2 R´eduction de donn´ees . . . 30
2.2.2.3 Acquisition de donn´ees efficace en ´energie . . . 30
2.2.3 Techniques orient´ees mobilit´e . . . 32
2.3 Techniques de clustering . . . 32
2.3.1 Clustering-Rappel . . . 33
2.3.2 Crit`eres de performances d’un processus de clustering . . . . 35
2.3.3 Les principales approches de clustering . . . 35
2.3.3.1 Algorithmes bas´es sur les ID . . . 36
2.3.3.2 Algorithmes bas´es sur les Degr´es . . . 36
2.3.3.3 Algorithmes bas´es sur la mobilit´e . . . 37
2.3.3.4 Algorithmes bas´es sur les poids des nœuds . . . 37
2.3.3.5 Algorithmes bas´es sur les probabilit´es . . . 38
2.3.3.6 Algorithmes bas´es sur les m´eta-heuristiques inspir´es de la nature . . . 38
2.3.4 Algorithmes de clustering con¸cus pour les RCSFs . . . 39
2.3.4.1 Low Energy Adaptive Clustering Hierarchy (LEACH) 39
2.3.4.2 Energy Efficient Hierarchical Clustering (EEHC) . 40
2.3.4.3 Hybrid Energy-Efficient Distributed Clustering (HEED) 40
2.3.4.4 Distance-Energy Cluster Structure Algorithm (DECSA) 42
2.3.4.5 Spectral Classification based on Near Optimal Clus-tering (SCNOC) . . . 43
2.3.4.6 Extensions et autres approches similaires . . . 43
![Figure 1.4 – Chronologie des plate-formes de capteurs [ 7 ]](https://thumb-eu.123doks.com/thumbv2/123doknet/2195966.12005/31.892.134.719.353.562/figure-chronologie-plate-formes-capteurs.webp)


![Tableau 2.1 – Synth` ese r´ ecapitulative des principaux algorithmes de clustering(1/2) Algorithmede clusteringS´electiondescluster-headsComplexit´eMobilit´edesnœudsConnectivit´eintr a-clustersClustersdisjointsNombredeclustersFormationdesclustersMulti-niveaux LCA[15]IdentifiantVariableOui1-sautNonVariableDistribu´eeNon CBRP[86]IdentifiantVariableOui1-sautNonVariableDistribu´eeNon ACE[23]Connectivit´eConstanteOuik-sautsNonVariableDistribu´eeNon CONID[26]Connectivit´e/ IdentifiantVariableOui1-sautNonVariableDistribu´eeNon WCA[24]Poidsdes nœudsVariableOui1-sautNonVariableDistribu´eeNon 3hBAC[110]Connectivit´eVariableOui3-sautsOuiVariableDistribu´eeNon LEACH[48]Probabiliste/ Al´eatoireVariableNon1-sautOuiVariableDistribu´eeNon LEACH-C[49]Probabiliste/ EnergieVariableNon1-sautOuiVariableCentralis´eeNon LEACH-F[49]Probabiliste/ Al´eatoireVariableNon1-sautOuiConstantCentralis´eeNon TL-LEACH [71]Probabiliste/Al´eatoireVariableNon1-sautOuiVariableDistribu´eeOui HEED[108]Probabiliste/ EnergieConstanteNon1-sautOuiVariableDistribu´eeNon EEHC[16]Probabiliste/ Al´eatoireVariableNonk-sautsOuiVariableDistribu´eeOui EECS[104]Probabiliste/ EnergieConstanteNon1-sautOuiConstantDistribu´eeNon](https://thumb-eu.123doks.com/thumbv2/123doknet/2195966.12005/68.892.162.758.140.1134/clustersclustersdisjointsnombredeclustersformationdesclustersmulti-sautnonvariabledistribu-sautnonvariabledistribu-sautsnonvariabledistribu-sautsouivariabledistribu-sautouivariablecentralis-sautouiconstantcentralis-sautsouivariabledistribu.webp)