Pépite | Approche informationnelle pour la navigation autonome tolérante aux défauts : application aux systèmes robotiques mobiles
Texte intégral
Figure


Documents relatifs
Le chapitre 2 décrit les équipements à énergie renouvelable étudiés dans ce rapport pour la production, stockage et consommation d’énergie (éolienne, panneaux
Figure 4.7 – Distances minimales entre les agents de la flotte dans le cas de perte d’agents Les résultats présentés dans ces simulations montrent l’efficacité de
Chapitre 2 - Asservissement visuel dans un environnement idéalisé non encombré Ce chapitre sera consacré à l’étude de la perception en temps réel d’un robot mobile,
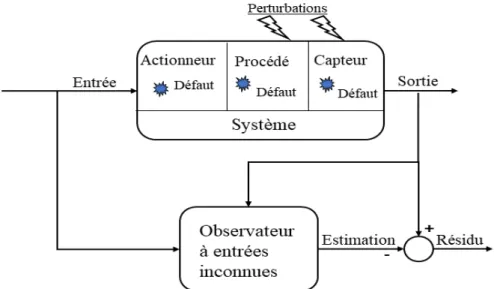
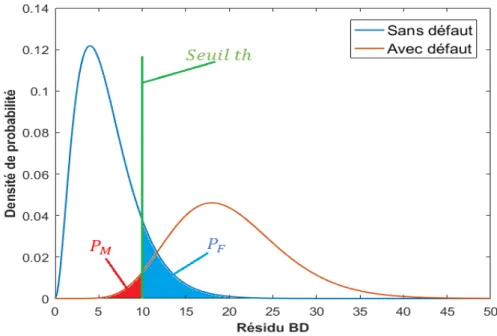
Un défaut actionneur est une défaillence représentant une perte totale ou partielle d‟un actionneur agissant au niveau de la partie opérative et déteriorant le
Pour conclure cette partie, nous présentons gure 3.21 les résultats obtenus lorsque l'am- plitude du défaut système ou d'actionneur devient trop importante pour que la commande
Dans le cadre de la navigation autonome à l'aide d'une carte cognitive topologique, nous avons montré dans le chapitre précédent comment un modèle simplié de cortex pouvait per-
• Systèmes à grande échelle avec actionneurs et capteurs répartis (parcs éoliens, centrales photovoltaïques, télescopes, etc.).. Institute for Design and Control
Nous présentons dans cette section les résultats de l’implémentation de l’architecture pro- posée à la section 5.4 pour l’intégration de la localisation globale, du suivi
