Cartes de photons et visibilité
Texte intégral
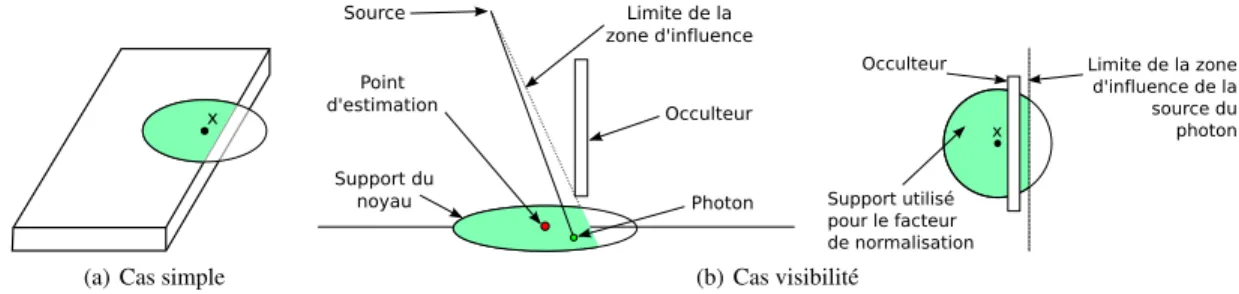
Figure



Documents relatifs
Pour montrer que cette conjecture est toujours vraie, on désigne le premier des quatre entiers par la lettre n.. Exprime alors les
Choisis pour x l’inconnue de ton choix et complète le tableau suivant avec des âges exprimés en fonction de x.. x désigne
Choisis pour x l’inconnue de ton choix et complète le tableau suivant avec des âges exprimés en fonction de xa. x
• « Pour un même nombre entier choisi, les résultats des programmes A et B sont soit tous les deux des entiers pairs, soit tous les deux des
5 La figure ci-dessous est composée des carrés A, B, C et D, on la complète par le rectangle E afin de former un grand
Si Nathalie donnait 2 timbres à Pierre, alors celui-ci en aurait deux fois plus qu’elle.. Si on triple sa longueur et que l’on double sa largeur, son périmètre augmente de
Si Nathalie donnait 2 timbres à Pierre, alors celui-ci en aurait deux fois plus qu’elle.. Si on triple sa longueur et que l’on double sa largeur, son périmètre augmente de
Pour chaque question, tu ne peux utiliser qu'une fois exactement les quatre nombres, l'addition, la soustraction et la multiplication.. Toutefois, tu peux placer
