Preconditioned Krylov subspace methods for solving radiative transfer problems with scattering and reflection
Texte intégral
Figure





Documents relatifs
Freund, Reduced-order modeling of large linear subcircuits via a block Lanczos algorithm, in: Proceedings of the 32nd ACM=IEEE Design Automation Conference, ACM, New York, 1995,
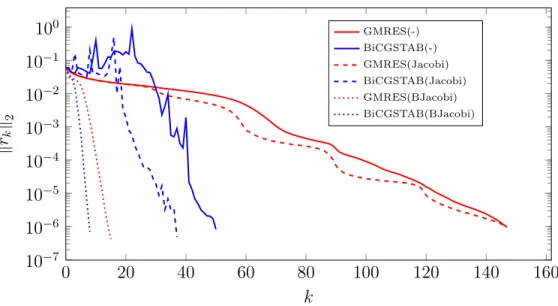
3, it is shown how the number of iterations evolves with the number of degrees of freedom (dof) for the four implemented solving methods: three solvers (COCG, BiCGCR, QMR) with
Krylov Subspace Methods for Inverse Problems with Application to Image Restoration.. Mohamed
In Section 4, we define EGA-exp method by using the matrix exponential approximation by extended global Krylov subspaces and quadrature method for computing numerical solution
Schwarz preconditioning combined with GMRES, Newton basis and deflation DGMRES: preconditioning deflation AGMRES: augmented subspace. 11
This section considers the development of finite element subspaces satisfying the crucial inf-sup condition in Assumption 3.1.. Lemma 4.1 below provides several equivalent
A significant result derived in this paper is the superlinear convergence of the GMRES algorithm when it is preconditioned with the so called Schwarz preconditioner in the case of
In order to check the validity of the present dual method, we compare the stress fields obtained using this method with the stress fields obtained using the classical displacement
