Pour l’obtention du grade de
Docteur de l’Université de Poitiers
(Faculté des Sciences Fondamentales et appliquées) (Diplôme national - Arrêté du 25 Avril 2002)
Ecole Doctorale
SCIENCES POUR L’INGÉNIEUR ET AÉRONAUTIQUE
Secteur de Recherche :
GENIE MECANIQUE, PRODUCTIQUE, TRANSPORT
Présentée par :
Enrique Cuan Durón
___________________________________
CONTRIBUTION A L’ÉTUDE DU PLACEMENT
OPTIMAL DE TACHES DE ROBOTS REDONDANTS
_____________________________________________________ Directeurs de thèse :
José Alfonso Pámanes García
Saïd Zeghloul
Soutenance prévue le 4 juillet 2008 à Institut Technologique de La Laguna
JURY
Angel A. ROJAS S. Professeur, Facultad de Ingeniera de la UNAM, Mexico, Mexique, Rapporteur Gérard POISSON Professeur des Universités – LVR BOURGES, Rapporteur
José Alfonso PAMANES G. Professeur, ITLag, Torreon, Mexique, Examinateur
Saïd ZEGHLOUL Professeur des Universités – LMS Poitiers Examinateur
1
Cette thèse s’est déroulée dans le cadre d’une cotutelle entre
l’Université de Poitiers (FRANCE) et l’Institut Technologique de La
Laguna, Torreón, Coahuila. (Mexique)
ii
Contribution à l’Etude du Placement Optimal de Tâches des Robots Redondants
Résumé
Les études menées dans le cadre de cette thèse concernent le problème du placement optimal de tâches des robots manipulateurs redondants en vue d’améliorer les performances cinéstotatiques de ceux-ci lors de l’exécution des tâches. Dans la première partie du rapport, nous rappelons les concepts fondamentaux de cinématique des manipulateurs, et nous évoquons les notions liées à la modélisation cinématique des robots ainsi que à la redondance cinématique et à l’accessibilité aux tâches de robots. D’autre part, nous examinons les principaux indices de performance cinématique qui ont été proposés dans la littérature scientifique. Dans la suite du rapport, nous évoquons les contributions les plus intéressantes qui ont été publiés dans la littérature scientifique, liés au sujet du placement relatif optimal robot / tâche. Nous classifions ces travaux dans trois groups : ceux concernant l’accessibilité aux tâches ; ceux consacrés à l’optimisation des performances cinétostatiques des manipulateurs ; et ceux qui envisagent la minimisation du temps du cycle de la tâche. Ensuite, en tenant compte des limitations des méthodes publiés au préalable, nous développons nos approches pour résoudre le problème du placement de tâches sous trois scénarios : optimisation d’un seul critère de performance du robot pour un point de la tâche dans un environnement sans obstacles ; optimisation multicritère pour plusieurs points de la tâche dans un environnement sans obstacles ; et finalement optimisation globale d’un seul critère dans un environnement encombré. Nos méthodes constituent des contributions dans le domaine de la planification des mouvements des robots redondants. Notamment ce qui concerne la prise en compte des contraintes qui assurent l’obtention de solutions réalistes. Nous retenons aussi deux aspects très spécifiques de nos méthodes : le premier consiste à la démarche que nous utilisons pour la synthèse de trajectoires articulaires continues entre les points-tâche dans le cas de l’optimisation multicritère ; le deuxième aspect concerne la fonction objective que nous proposons dans le cas de la méthode avec contrainte pour l’évitement de collisions. Ces deux démarches sont transcendantes pour la faisabilité des formulations proposées pour le placement optimal. Pour les robots redondants il n’existe pas d’autres méthodes pour le placement optimal multicritère, ni avec l’évitement d’obstacles. L’efficacité de nos méthodes est validée en les appliquant à des cas divers dans tous les scénarios envisagés.
Mots-clés : Robots redondants, placement relatif robot / tâche, performance cinétostatiques, optimisation,
planification de mouvements.
Contribution to the Study of the Optimal Placement of Tasks of Redundant Robots
Abstract
This thesis deals with the placement problem of tasks of redundant robotic manipulators in order to optimize the kinetostaic performances of the robots. The first part of the work is addressed to review the basic concepts of kinematics of manipulators and indices of kinetostatic performances. Then, an analysis is carried out of the previously proposed methods to solve the optimal placement problem. Three kinds of methods are identified: for accessibility to tasks; for optimization of kinetostatic performances; for minimization of cycle-time of tasks. The limitations observed in these works are taken into account in order to propose more interesting methods to compute the optimal relative placement robot / task. Three scenarios are considered in our work: optimization of one index of performance for one task-point without obstacles in the environment; multi-criteria optimization of performances for a number of task-points without obstacles in the environment; and finally, global optimization of one index of performance taking into account the obstacle avoidance. Thanks to the features of our methods, they represent interesting contributions in the area of motion planning of robotic manipulators. Namely, they take into account constraints in order to obtain realistic solutions including obstacle avoidance; on the other hand, the multi-criteria method uses an original algorithm in order to synthesize continuous joint trajectories respecting a prescribed law of motion. To the author’s knowledge, there not exist methods for task placement based in multi-criteria optimization neither by taking into account obstacle avoidance. The efficacy of the proposed methods is illustrated by applying them to several study cases.
Keywords: Redundant robots, relative robot / task placement, optimization, kinetostatic performance, motion planning.
Contribution à l’Etude du Placement Optimal
de Tâches des Robots Redondants
(Contribución al Estudio del Emplazamiento Óptimo de Tareas de Robots Redundantes)
Thèse présentée par
Enrique Cuan Durón
Résumé étendu
Les études menées dans le cadre de cette thèse concernent le problème du placement optimal de tâches des robots manipulateurs redondants en vue d’améliorer les performances cinéstotatiques de ceux-ci lors de l’exécution des tâches. On développe des méthodes pour résoudre le problème du placement sous trois scénarios : optimisation d’un seul critère de performance pour un point de la tâche dans un environnement sans obstacles ; optimisation multicritère pour plusieurs points de la tâche dans un environnement sans obstacles ; et finalement optimisation globale d’un seul critère dans un environnement encombré.
Le problème du placement optimal d’une tâche d’un robot manipulateur apparaître de l’intérêt de garder des bonnes conditions d’efficacité et de précision du robot lors de l’exécution de la tâche. Du point de vue industriel, la solution du problème du placement est intéressante en vue des bénéfices que l’utilisateur peut en tirer au niveau de la productivité, de la qualité et des coûts des produits. D’autre part, dans les nouvelles applications qui ont été développés pour les robots, par exemple dans le domaine de la chirurgie, le placement optimal robot / tâche permet d’augmenter au maximum la fiabilité des mouvements du manipulateur.
iv
Dans un premier temps, nous révisons les concepts fondamentaux de cinématique des manipulateurs, et nous évoquons les notions liées à la modélisation cinématique des robots ainsi que à la redondance cinématique. Nous rappelons aussi les conditions d’accessibilité aux tâches, qui sont particulièrement intéressantes dans les formulations que nous introduisons pour le calcul du placement optimal. D’autre part, nous examinons les principaux indices de performance cinématique qui ont été proposés dans la littérature scientifique. Nous remarquons l’intérêt de l’indice de manipulabilité et du nombre de conditionnement de la matrice jacobienne d’un robot pour des applications industrielles. Les deux indices mesurent bien l’éloignement d’une configuration d’un robot par rapport aux configurations singulières. Cependant, le nombre de conditionnement considère l’uniformité de la aptitude à déplacer l’organe terminal dans toutes directions, alors que la manipulabilité tiens compte de la facilité globale à produire ce genre de déplacement, même si cette aptitude privilège certains directions. On observe que la matrice jacobienne d’un robot, qui sert à calculer aussi bien la vitesse linéaire que la vitesse angulaire de l’organe terminale, n’est pas dimensionnellement homogène, ce qui rends difficile la définition d’un indice de performance significatif du robot en utilisant cette matrice. Cependant l’homogénéisation de la matrice jacobienne à partir d’une longueur caractéristique donne des résultats intéressants aussi bien pour les manipulateurs sériels que pour les parallèles.
Dans la suite du rapport, nous étudions les contributions les plus intéressantes qui ont été publiés jusqu’au présent dans la littérature scientifique, liés au sujet du placement relatif optimal robot / tâche. La plus part des travaux concernent les robots non redondants. Dans un premier group des contributions les auteurs ont par but l’accessibilité à la tâche souhaitée. Dans ces travaux on cherche, d’une part, à caractériser les conditions d’accessibilité aux tâches, et d’autre part, à proposer des stratégies de calcul. Dans ce premier group nous avons séparé les études qui considèrent que la tâche est définie par un chemin complètement spécifiée entre deux points extrêmes, de ceux qui assument que le chemin entre ces points peut être changé par l’utilisateur.
v
Même s’ils ont des attributs intéressants, les méthodes examinées dans le premier group ont aussi des limitations diverses. Notamment, ces approches n’ont pas envisagé l’optimisation des performances cinétostatiques des robots.
Les travaux examinés dans un second group sont consacrés à l’optimisation des performances cinétostatiques des manipulateurs. Plusieurs approches ont été considérés pour le calcul du placement relatif optimal robot / tâche. La plupart, aussi bien dans le cas des robots no redondants que dans le cas des robots redondants, ne tiennent pas compte des contraintes (par exemple, le dépassement des butées articulaires et l’évitement de singularités et de collisions) que normalement existent dans les applications pratiques ; les solutions qu’ils donnent ne sont donc pas réalistes. D’un autre coté, presque toutes les méthodes optimisent juste un indice de performance ce qui n’est pas intéressant si une tâche nécessite tenir compte de plusieurs critères. Une des méthodes analysées optimise plusieurs critères, mais il ne considère pas son application aux robots redondants.
Un troisième ensemble de contributions est basée sur la dynamique des manipulateurs et envisagent la minimisation du temps du cycle de la tâche. Néanmoins, celles-ci ne tiennent pas compte des aspects du fonctionnement des robots concernant la précision ou efficacité des mouvements, ce qui peut être intéressant dans les applications pratiques.
En tenant compte des limitations des méthodes existantes, dans la suite de la thèse nous proposons des formulations pour le calcul du placement relatif optimal robot / tâche, sous des contraintes qui rendent possible leur application dans un scénario réaliste. Dans un premier cas nous considérons l’optimisation de fonctionnement du robot pour un point du chemin de la tâche, sous un seul critère de performance. Ce genre de problème peut se présenter quand l’action transcendant du robot doit se réaliser dans un seul point du chemin spécifié. Par exemple, dans les tâches de soudage à points, le robot peut amener la torche en suivant un chemin spécifié, et on souhaite que le robot arrive en point de soudage avec une configuration du robot ayant une aptitude maximale à produire déplacements linéaires ou angulaires avec l’organe terminal ; une telle configuration permettra au robot corriger facilement la position ou l’orientation de la torche, si c’est nécessaire.
vi
La deuxième formulation que nous proposons concerne l’optimisation de fonctionnement d’un manipulateur pour plusieurs points d’un chemin souhaitée, sous multiples critères de performance. Ce scénario est prévu pour des tâches sollicitant des attributs divers du robot dans différents points du chemin souhaité. Par exemple, dans les tâches de déplacement d’objets (pick and place), la prise peut se réaliser dans une zone du site où la situation de l’objet n’est pas établie de façon précise, ensuite le déplacement de l’objet peut nécessiter d’une vitesse importante dans une certaine direction et, finalement, la pose de l’objet peut requérir d’une précision élevée. Dans ce cas, il convient que le robot ait une manipulabilité maximale pour la prise, ensuite que les configurations privilégient l’amplitude de l’indice du rapport de vitesse dans la direction de déplacement et, finalement, que la pose puisse se réaliser avec une valeur élevée de l’indice de précision en vitesse.
Dans nos formulations nous introduisons des contraintes permettant l’accès au chemin souhaité sans dépasser les butées articulaires du robot, et en évitant se rapprocher des configurations singulières. En plus, nous prescrivons des contraintes sur les variables du placement de façon à borner l’espace disponible pour la tâche, et aussi à respecter la capacité de manœuvre du dispositif positionneur.
Nous proposons une troisième formulation pour l’optimisation de fonctionnement pour plusieurs points du chemin du robot, sous un seul critère de performance, avec une contrainte supplémentaire qui permet d’éviter des collisions dans un environnement encombré.
Les formulations que nous proposons constituent des contributions intéressantes dans le domaine de la planification des mouvements des robots redondants. Notamment ce qui concerne la prise en compte des contraintes qui assurent l’obtention de solutions réalistes. Nous retenons aussi deux aspects très spécifiques de nos méthodes : le premier consiste à la démarche que nous utilisons pour la synthèse de trajectoires articulaires continues entre les points-tâche (ceux qui servent à spécifier le chemin souhaité) dans le cas de l’optimisation multicritère ; le deuxième aspect concerne la fonction objective que nous proposons dans le cas de la méthode avec contrainte pour l’évitement de collisions. Ces deux démarches sont transcendantes pour la faisabilité des formulations proposées.
vii
L’efficacité de nos méthodes est validée en les appliquant à des cas d’étude divers dans tous les scénarios envisagés. Nous utilisons la méthode de calcul du placement pour l’optimisation d’un seul critère dans un point de la tâche avec deux robots : le premier du type 3R (avec une tâche plane); et le deuxième du type 4R (qui doit suivre un chemin dans l’espace 3D). Dans les deux cas nous déterminons le placement de la tâche qui optimise l’indice de manipulabilité des robots pour points spécifiques du chemin souhaité de l’organe terminal. Avec les solutions que nous obtenons, les manipulabilités normalisées améliorent d’un 39 % et 22 % respectivement par rapport aux valeurs obtenues avec un placement initial établi de façon intuitive. Les temps de calcul sont de 1 minute et de 2.5 minutes, respectivement, avec un processeur Pentium III, à 1 Ghz et 256 Mb de mémoire RAM.
La méthode de calcul du placement multicritère pour plusieurs points est appliquée avec les mêmes robots du cas précédent. Nous considérons l’optimisation des indices de performance pour quatre points tâche: deux avec la manipulabilité et deux avec le nombre de conditionnement. Pour le robot 3R les résultats montrent améliorations d’un 20 % et 8 % pour la manipulabilité normalisée, et d’un 104 % et 173 % pour le nombre de conditionnement. Pour le robot 4R les améliorations sont d’un 60 % et 41 % pour la manipulabilité, et d’un 13 % et 71 % pour le nombre de conditionnement. L’ordinateur met 3.08 minutes de calcul pour le cas du robot 3R et 5.5 minutes pour le robot 4R, avec le même processeur du cas monocritère.
En ce qui concerne la méthode de placement avec un seul critère dans un environnement encombré, on obtient aussi des améliorations intéressantes de l’indice de manipulabilité. L’augmentation moyenne est d’un 56 % approximativement. Pour résoudre ce problème il est nécessaire de mettre 14.73 minutes de temps de calcul dans le même ordinateur des cas précédents.
On remarque que les temps de calcul qui nécessitent nos méthodes ne sont pas petits, notamment le cas du placement dans des environnement encombrés. Pourtant, nous rappelons que les problèmes que nous étudions doivent être résolus, hors-ligne, dans le cadre d’un processus de conception de sites robotisés. Les résultats montrent que l’investissement de temps apporte des bénéfices importants dans les performances d’un robot.
viii
Les tâches des cas d’étude considérés dans ce travail sont spécifiées en utilisant seulement les coordonnées de position d’un point de l’organe terminal. L’orientation de ce maillon n’est pas importante dans tous les cas. Cette caractéristique n’enlève pas de généralité aux méthodes que nous proposons car, dans le processus de calcul, la situation souhaitée de l’organe terminal est spécifiée finalement par des matrices de passage. Celles-ci sont actualisées dans la phase I des algorithmes dans tous les scénarios considérés. Cependant, il est nécessaire remarquer que, si le robot est obligé de contrôler la position et l’orientation de son outil, alors les indices de performance doivent mesurer de façon consistent l’aptitude à produire aussi bien des déplacements linéaires que angulaires de ce maillon. Il est possible d’utiliser, par exemple, les indices de manipulabilité translationnelle et rotationnelle.
Finalement, nous effectuons des remarques concernant quelques aspects des indices de performance et de nos méthodes qu’il convient d’examiner dans la suite des travaux. Parmi ces aspects, nous proposons d’étudier la définition d’un indice de performance permettant de mesurer et bien pondérer les deux types de déplacement (linéaire et angulaire) de l’organe terminal. Nous considérons aussi convenable d’effectuer des études concernant l’influence de la distance entre les points tâche sur la compatibilité des indices de performance voisins dans l’optimisation multicritère.
ix
REMERCIEMENTS
Ce travail a été réalisé au Laboratoire de Mécanique des Solides de l’Université de Poitiers et à la División de Estudios de Posgrado e Investigación (DEPI) de l’Institut Technologique de la Laguna (ITLag), au Mexique, avec le support financière de la Secretaría de Educación Pública, et le programme ECOS (Evaluation et Orientation de la Coopération Scientifique) - ANUIES (Asociación Nacional de Universidades e Instituciones de Educación Superior). Je tiens à remercier à ces institutions pour avoir rendu possible la réalisation de ce travail.
J’exprime ma reconnaissance à Monsieur Saïd ZEGHLOUL, professeur responsable de l’équipe de Mécanismes et Robotique du Laboratoire de Mécanique des Solides de l’Université de Poitiers, et à Monsieur José-Alfonso PAMANES-GARCÍA, professeur responsable de la ligne de recherche en mécanique de robots de l’équipe de Mécatronique et Commande de la DEPI-ITLag, pour la confiance qu’ils m’ont accordée en m’accueillant dans ses équipes. Ils sont aussi les responsables scientifiques de cette thèse. Qu’ils trouvent ici l’expression de ma gratitude pour ses conseils et ses compétences qui ont été extrêmement précieux pour le déroulement de ce travail.
Je suis très reconnaissant à Monsieur Gérard POISSON, Professeur au LVR Bourges pour avoir examiné ce travail. Je suis très sensible à l’honneur qu’il me fait en acceptant d’être rapporteur et membre de ce jury.
Je remercie vivement Monsieur Angel-Alfonso ROJAS-SALGADO, Professeur à l’Université Nationale Autonome de Mexique, pour avoir accepté de juger ce travail en tant que rapporteur et membre du jury.
x
Contribución al Estudio del Emplazamiento Óptimo de
Tareas de Robots Redundantes
Contenido:
Pág.INTRODUCCIÓN GENERAL
xiv1. CONCEPTOS FUNDAMENTALES
11.1 Introducción 1
1.2 Conceptos Básicos de Cinemática de Manipuladores 2
1.2.1 Coordenadas operacionales 2
1.2.2 Variables articulares o coordenadas generalizadas 3 1.2.3 Modelado cinemático directo de posición 4 1.2.4 Modelado cinemático inverso de posición 4
1.2.5 Redundancia cinemática 5
1.2.6 Modelado cinemático directo de velocidad 6 1.2.7 Modelo cinemático inverso de velocidad 7
1.3 Conceptos Preliminares sobre Accesibilidad a Tareas de Robots 8
1.3.1 Tarea de un robot 8
1.3.2 Dominio de configuraciones accesibles 9 1.3.3 Espacio de trabajo y espacio de trabajo libre 9 1.3.4 Configuraciones asociadas a una tarea 11
1.4 Aspectos de un Robot 11
1.5 Accesibilidad a una Tarea 13
xi
2. DESEMPEÑO CINEMÁTICO DE MANIPULADORES
162.1 Introducción 16
2.2 Área de la Región Accesible 17
2.3 Número de Condicionamiento de la Matriz Jacobiana 18
2.4 Determinante de la Matriz Jacobiana 20
2.5 Manipulabilidad 23
2.6 Relaciones de Transmisión de Velocidad y de Fuerza 25
2.7 Mínimo Valor Singular de la Matriz Jacobiana 27
2.8 Índice de Condicionamiento Cinemático 27
2.9 Homogeneización de la Matriz Jacobiana 28
2.10 Conclusión 29
3. ESTADO DEL ARTE SOBRE EMPLAZAMIENTO ÓPTIMO
303.1 Introducción 30
3.2 Criterios de Accesibilidad 31
3.2.1 Tareas tipo I 31
3.2.2 Tareas tipo II 34
3.3 Criterios Cinetostáticos 36
3.4 Criterios Basados en la Dinámica del Robot 38
3.5 Optimización Mediante la Resolución de la Redundancia 41
3.8 Conclusión 42
4. EMPLAZAMIENTO ÓPTIMO DE TAREAS BAJO UN SÓLO CRITERIO
DE DESEMPEÑO
444.1 Introducción 44
xii
4.2.1 Especificación de la tarea del robot 45 4.2.2 Tipo de robot y entorno de trabajo 48
4.3 Planteamiento del Problema 48
4.4 Proceso de Cómputo 52
4.5 Restricciones del Problema 57 4.5.1 Restricciones explícitas en la Fase I 57 4.5.2 Restricciones explícitas en la Fase II 58
4.6 Casos de Estudio 61
4.6.1 Descripción de los robots a utilizar. 61 4.6.2 Emplazamiento óptimo de una tarea del robot 3R 66 4.6.3 Emplazamiento óptimo de una tarea del robot 4R 70
4.7 Conclusión 73
5. EMPLAZAMIENTO ÓPTIMO DE TAREAS BAJO MÚLTIPLES
CRITERIOS DE DESEMPEÑO
745.1 Introducción 74
5.2 Planteamiento del Problema 75
5.3 Proceso de Cómputo 77
5.4 Restricciones del Problema 83
5.5 Casos de Estudio 83
5.5.1 Emplazamiento óptimo bajo múltiples criterios de desempeño. Robot 3R 84 5.5.2 Emplazamiento óptimo bajo múltiples criterios de desempeño. Robot 4R 89
5.6 Optimización Global del Desempeño 94
xiii
6. EMPLAZAMIENTO ÓPTIMO DE TAREAS EN UN ENTORNO CON
OBSTÁCULOS
96
6.1 Introducción 96
6.2 Planteamiento del Problema 97
6.3 Función Objetivo 97 6.4 Proceso de Cómputo 100 6.6 Caso de Estudio 102 6.7 Conclusión 106
7. CONCLUSIÓN GENERAL
107REFERENCIAS BIBLIOGRÁFICAS
114xiv
INTRODUCCIÓN GENERAL
Desde la aplicación de los primeros robots industriales a principios de la década de los sesentas del siglo pasado ese tipo de máquinas, así como las tecnologías asociadas a las mismas (sistemas computacionales, electrónica, sensores, potencia eléctrica, materiales, etcétera), han venido desarrollándose de manera consistente [Groover et al, 1986]. Por otra parte, múltiples problemas teórico-prácticos relacionados con el diseño y la adecuada explotación de los robots manipuladores fueron resolviéndose en el transcurso de las décadas subsecuentes: la sistematización del modelado cinemático y dinámico, la identificación y prevención de singularidades cinemáticas, la planificación de trayectorias en entornos obstaculizados, el control óptimo de movimientos, la caracterización y optimización del desempeño cinemático, y el diseño de arquitecturas óptimas, son sólo algunos de los temas que fueron abordados por investigadores en robótica.
Más específicamente, el estudio de la redundancia cinemática de robots se generalizó en la década de los años ochentas. Si bien a principios de la década de los años setentas se había señalado la utilidad de tales atributos de los robots para la prevención de singularidades [Whitney, 1972], no se publicaron trabajos sobre la resolución de la redundancia hasta fines de esta década [Liegois, 1977].
xv
principalmente dirigidos hacia la resolución de la redundancia bajo diferentes enfoques [Yoshikawa, 1984; Klein, 1985; Maciejewski y Klein, 1985]. Sin embargo, cuestiones tales como el diseño de una estación industrial robotizada y la planificación global de los movimientos de un robot redundante en dicha estación, plantean problemas suplementarios al de la resolución de la redundancia. En efecto, la determinación del óptimo emplazamiento relativo robot / tarea, por ejemplo, es tan importante como la resolución de la redundancia para la prevención de singularidades o para la optimación del desempeño cinetostático del robot.
El tema del emplazamiento relativo robot / tarea ha sido tratado previamente en la literatura científica considerando principalmente robots no redundantes [Nelson,
Pedersen y Donath, 1987], [Pamanes, 1989], [Pamanes y Zeghloul, 1991-a], [Pamanes
y Zeghloul, 1991-b], [Zeghloul y Pamanes, 1993]. Si bien, en algunos trabajos dicho tema se ha tratado con robots redundantes, Vg. [Salisbury y Craig, 1982], [Hemmerle y Prinz, 1991], los enfoques propuestos hasta ahora presentan ciertas limitaciones.
En el presente trabajo se propone una metodología para el cálculo del emplazamiento óptimo de la tarea de un robot redundante. Se asume que la tarea a realizar por el robot consiste en el seguimiento de una ruta con una geometría precisa, especificada por el usuario. Son múltiples las tareas industriales de robots que presentan estas características; por ejemplo, la aplicación de soldadura de arco, el depósito de pegamentos y selladores, la aplicación de pintura, y el corte mediante rayo láser. La metodología que aquí se presenta aporta ventajas con respecto a los enfoques que se han publicado hasta ahora.
Para la formulación de la metodología propuesta se consideran diferentes casos de estudio. El primer caso se refiere al cálculo del emplazamiento óptimo de la tarea teniendo en cuenta un solo criterio de desempeño del robot en un entorno libre de obstáculos. Posteriormente se considera el escenario en el cual se desea optimizar diferentes criterios de desempeño en varios puntos de una ruta sin obstáculos. Finalmente, se plantea el caso en el que se desea optimizar un solo criterio de desempeño en un ambiente obstaculizado.
xvi
en el paquete Matlab©. La validación de los resultados se efectúa mediante un proceso de simulación gráfica aplicando el paquete SMAR (Système de Modélisation et
Animation de Robots), que fue desarrollado en la Universidad de Poitiers, Francia
[Zegholul et al, 1987].
El presente reporte está organizado de la siguiente manera:
En el Capítulo 1 se presentan conceptos fundamentales sobre cinemática de robots y sobre condiciones de accesibilidad a tareas de robots, mientras que en el Capítulo 2 se hace una revisión de los trabajos que se han publicado en la literatura científica concernientes al tema del emplazamiento relativo óptimo robot / tarea.
En el Capítulo 3 se efectúa un estudio de los índices que han sido propuestos en diversos trabajos para medir el desempeño cinemático de robots manipuladores. Algunos de estos índices serán aplicados en los capítulos posteriores para evaluar el mérito de los emplazamientos considerados en nuestra metodología de cálculo.
La formulación para la resolución del problema del emplazamiento óptimo basado en un solo criterio de desempeño se desarrolla en el Capítulo 4. En el Capítulo 5 se trata el caso de la optimización de múltiples criterios de desempeño. En el Capítulo 6 se plantea la optimización de un criterio de desempeño considerando la presencia de obstáculos en el entorno del robot. En todos los casos de estudio se ilustra la efectividad de la metodología mediante su aplicación a problemas específicos.
En el Capítulo 7, finalmente, se analizan los resultados obtenidos, se define el alcance de nuestra metodología, y se proponen posibles líneas de exploración que se podrían retomar en el futuro como complemento del presente trabajo.
Capítulo 1
CONCEPTOS FUNDAMENTALES
1.1 INTRODUCCIÓN
La teoría sobre la mecánica de manipuladores se ha venido desarrollando en el transcurso de las últimas cinco décadas teniendo como base la teoría fundamental de la mecánica clásica. Durante ese lapso, múltiples autores han efectuado interesantes contribuciones relacionadas, entre otros temas, con la formalización de técnicas para el modelado cinemático de manipuladores, el análisis de la accesibilidad a tareas, la caracterización del espacio de trabajo y del desempeño cinetostático. En los capítulos subsiguientes de este reporte se aplicarán varias de las nociones incorporadas en los últimos años a la cinemática de manipuladores. Con el fin de preparar la aplicación de las mismas, y de introducir la terminología que se aplicará a lo largo de este trabajo, en el presente capítulo se hace una revisión de tales nociones.
1.2 CONCEPTOS BÁSICOS DE CINEMÁTICA DE MANIPULADORES
1.2.1 Coordenadas operacionales.
Las coordenadas operacionales de un robot son las m componentes del vector
x
∈
Rmque especifica la posición y la orientación del órgano terminal del robot en el espacio físico con respecto a un marco de referencia operacional (generalmente cartesiano) :
x = [ x1 , x2 , x3 , . . . , xm ] T
En el caso del movimiento general del órgano terminal en el espacio, dependiendo del tipo de coordenadas de orientación que se utilicen, m podría ser mayor que 6. Sin embargo, puesto que es preferible que dichas coordenadas sean independientes, m generalmente será igual a 6. En tal caso, las variables x1, x2, x3 de
la ecuación (1.1) especifican la posición del órgano terminal, mientras que x4, x5, x6
definen su orientación. En la Figura 1.1 se indica la posición del órgano terminal de un robot mediante las coordenadas Cartesianas
l, m, n
; es decir que x1=l,
x2=m,
x3=n.
xE yE zE
m
l
n
x0 y0 z0 ΣE Σ0 (1.1)Figura 1.1. Coordenadas operacionales de posición (Cartesianas) de un robot.
Para especificar la orientación, se asigna al órgano terminal un marco de referencia ortonormal, digamos ΣE, y se describe la orientación de éste con respecto a un marco
ortonormal fijo, digamos Σ0 (Figura 1.1). Es posible describir dicha orientación, por
ejemplo, mediante los ángulos de Euler α, β, γ, que corresponden a las rotaciones que se necesitaría aplicar al marco Σ0 con respecto a sus ejes z0, y0, y x0, sucesivamente,
para hacerlo coincidir con el marco ΣE.
Es necesario hacer notar que en ciertos casos particulares, el movimiento del órgano terminal podría no ocurrir en el espacio 3-D. En efecto, para algunas tareas, un movimiento plano, por ejemplo, del órgano terminal podría ser suficiente. En tal caso, el número de coordenadas operacionales se puede reducir a 2 o a 3, dependiendo de si la orientación es relevante o no para la tarea.
1.2.2 Variables articulares o coordenadas generalizadas.
Las coordenadas generalizadas, o variables articulares de un robot, son las n variables q1, q2, q3, . . . . , qn que definen la posición relativa de cada eslabón del
manipulador con respecto al precedente (Figura 1.2); n es el número de grados de libertad del manipulador. El conjunto de estas variables determina una configuración del robot, la cual se expresa mediante el vector q
∈
Rn:
q = [ q1, q2, q3, . . . . , qn] T (1.2) q2 x0 y0 Σ0 q1 q3
1.2.3 Modelado cinemático directo de posición.
Mediante el modelado cinemático directo de posición de un robot se establecen las funciones que determinan las coordenadas operacionales del robot a partir de sus variables articulares. Es decir, se establece la función f
( )
q tal que:( )
q fx=
donde:
x es el vector m-dimensional de coordenadas operacionales del robot.
q es el vector n-dimensional que define la configuración instantánea del robot (n ≥m).
f es una función vectorial del vector q.
1.2.4 Modelado cinemático inverso de posición.
Mediante el modelado inverso de posición de un robot se determinan los valores de las variables articulares que permiten ubicar al órgano terminal en una situación deseada. El modelado inverso de posición equivale a la resolución del sistema no lineal expresado por la Ecuación 1.3, para las componentes q1, q2, q3, ... qn del vector
q
de configuración del manipulador, satisfaciendo un vectorx
especificado; la función recíproca f -1 de f, si existe, define el modelo cinemático inverso de posición del robot:q= f−1( x)
En contraste con el modelo directo de posición que siempre puede definirse para un robot dado, el modelo inverso no siempre existe. En efecto, el modelo inverso de un robot puede quedar indeterminado, por ejemplo, si su arquitectura no es capaz (por falta de alcance, por insuficiencia de número de grados de libertad, etc.) de ubicar al órgano terminal en la situación especificada por el usuario.
(1.3)
1.2.5 Redundancia cinemática.
Para que un robot de n grados de libertad sea capaz de realizar una
tarea es necesario, aunque no suficiente, que se satisfaga la condición n ≥ m , siendo m el número de coordenadas operacionales que determinan las ubicaciones deseadas del órgano terminal durante la realización de la tarea. Ahora bien, si para una tarea dada se verifica n = m, entonces se dice que el robot es no redundante. En tal caso, para una ubicación deseada del órgano terminal existiría un número finito de configuraciones soluciones del modelo cinemático inverso de posición.
Por otra parte, si n > m , entonces el robot tiene más grados de libertad que los estrictamente necesarios para realizar su tarea, y se dice que es cinematicamente
redundante; esto implica la existencia de un número infinito de configuraciones
capaces de alcanzar cada situación deseada del órgano terminal. Como ejemplo se tiene el robot cuyo esquema cinemático es mostrado en la Figura 1.3, cuyas tareas se definen con 2 coordenadas operacionales (m = 2), pues sólo interesa la posición del órgano terminal en el plano. Se observa que el robot posee 4 articulaciones de revolución; se tienen por lo tanto 4 variables articulares (n = 4): q1, q2, q3, q4. En
consecuencia, el robot es redundante puesto que se verifica la condición n > m. En este caso existe un número infinito de configuraciones que permiten alcanzar la ubicación deseada; en la Figura 1.3 se presentan tres posibles configuraciones.
Figura 1.3. Múltiples posturas de un robot redundante de 4 grados de libertad, capaces de efectuar una tarea en el plano.
X Y
Es evidente que entre la infinidad de configuraciones-solución, es posible seleccionar alguna que brinde la mayor ventaja con respecto a las restantes bajo algún criterio de interés para el usuario; por ejemplo, el desempeño cinemático o la prevención de colisiones.
1.2.6 Modelado cinemático directo de velocidad.
El modelo cinemático directo de velocidad de un robot permite calcular el vector de velocidad del órgano terminal asociado a un vector conocido de velocidades articulares q• para una configuración del manipulador. El modelo directo de velocidad se obtiene derivando la Ecuación 1.3 con respecto al tiempo:
• • =J q q x ( ) donde: •
x es el vector de velocidad del órgano terminal, expresado en términos de las derivadas de las coordenadas operacionales con respecto al tiempo
(
x• =x•1 x•2 L x•m)
. Nótese que este vector incluye las componentesde velocidad lineal y de velocidad angular del órgano terminal. El punto por encima de la literal indica derivada con respecto al tiempo.
•
q es el vector de velocidades articulares
(
q• =q•1 q•1 L q•n).
J(q) es la matriz jacobiana del robot, la cual está definida como:
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = n m 3 m 2 m 1 m n 2 3 2 2 2 1 2 n 1 3 1 2 1 1 1 q f q f q f q f q f q f q f q f q f q f q f q f L M L M M M L L ) (q J , (1.5) (1.6)
En la Ecuación (1.6) f1, f2,K, fm son las m funciones escalares de las n
variables articulares, que forman el vector f
( )
q del modelo directo de posición expresado por la Ecuación (1.3).1.2.7 Modelo cinemático inverso de velocidad.
Mediante el modelo inverso de velocidad se calcula el vector de velocidades articulares que se requiere aplicar al robot para obtener una velocidad deseada del órgano terminal. Para un robot no redundante, si su matriz jacobiana no es singular, el modelo inverso de velocidad se obtiene despejando q• de la Ecuación 1.5:
• •
=J q x q -1( )
Nótese que esta Ecuación no se puede aplicar a un robot redundante dado que en tal caso la matriz jacobiana es rectangular (n > m) y, en consecuencia, su inversa no está definida. No obstante, se sabe que la solución general del sistema lineal (1.5) para q• , siendo la matriz de coeficientes J(q) de dimensión m × n (n > m), está dada por:
[
I J J]
z x J q•= + • + − + , donde: +J es la matriz pseudo inversa de J.
I es la matriz identidad de dimensión n × n
z es un vector arbitrario
∈
Rn.En la Ecuación (1.8) el término J+ x• es llamado solución de mínima
norma; se trata del vector de velocidad articular de mínima norma euclidiana que,
aplicada al robot, determina la velocidad especificada x• del órgano terminal. El término
[
I −J+J]
z, por su parte, es la proyección de z en el espacio nulo de J; se
trata por lo tanto de un vector de velocidades articulares que no produce efecto alguno en el órgano terminal, pero sí contribuye a reconfigurar internamente el manipulador.
(1.8) (1.7)
Este término existe solamente en el modelo inverso de velocidad de los robots redundantes, y se le conoce como la solución homogénea. Debido a sus atributos, la solución homogénea se utiliza para controlar las configuraciones de un robot de tal manera que éste tenga un desempeño cinemático adecuado, que evite colisiones y se mantenga tan alejado como sea posible de los límites articulares. En el Capítulo 2 se verá cómo elegir al vector z de tal manera que permita optimizar el desempeño
cinemático del manipulador.
1.3 CONCEPTOS PRELIMINARES SOBRE ACCESIBILIDAD A TAREAS DE ROBOTS
1.3.1 Tarea de un robot.
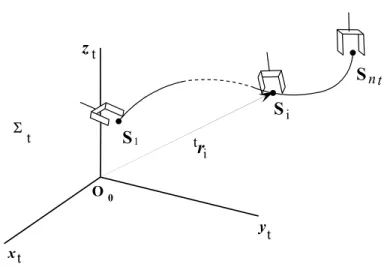
Se define una tarea de un robot como el conjunto
{
m i(t
i)
t
i[t
o,
t
f]
}
i
∈
ℜ
=
∀
∈
≡
ℑ
x
x
f
ℑ , (1.9)donde:
xi es el vector de coordenadas operacionales del órgano terminal, correspondiente al instante ti del intervalo de tiempo [to, tf] necesario para realizar la tarea.
f ℑ(t) es una función vectorial continua que relaciona el tiempo con las coordenadas operacionales. La función f ℑ constituye la ley de movimiento del órgano terminal del robot.
Es posible distinguir los siguientes dos tipos de tareas: • Tareas tipo I:
En este caso, la función f ℑ es impuesta en todo el intervalo [to, tf] por la naturaleza de la operación que debe ser realizada. Ejemplos típicos de este tipo de tareas son las operaciones de pintura y de soldadura de arco continua. En este caso, la trayectoria que debe seguir el órgano terminal es impuesta por la geometría de las piezas a tratar.
• Tareas tipo II:
Éstas son las tareas cuya función f ℑ puede ser definida arbitrariamente en el intervalo ]t0 , tf[, respetando las coordenadas operacionales de los extremos de la trayectoria ( xo = f ℑ(to) y xf = f ℑ (tf) ), las cuales están restringidas por la naturaleza de la operación. Las operaciones de soldadura de puntos, y de carga / descarga de una máquina herramienta constituyen ejemplos típicos.
1.3.2 Dominio de configuraciones accesibles.
El dominio de configuraciones accesibles (dca) de un robot está definido por el conjunto Qa ∈ℜ ≤ ≤ ∀ ∈ = ≡ qi min qi qi max, qi 1,2,...,n n q, i q , donde:
qi min es el límite articular inferior de la variable articular qi.
qi max es el límite articular superior de la variable articular qi.
Los límites articulares inferiores y superiores de las variables articulares están determinados por la geometría de los eslabones del robot. Tales límites dependen del diseño específico del robot que se considere.
En general el dominio Qa representa un hiperparalelepípedo en el espacio
euclidiano, y es un subconjunto del espacio articular del robot. En la Figura 1.4 se aprecia una representación gráfica del dca de un robot de 3 grados de libertad.
1.3.3 Espacio de trabajo y espacio de trabajo libre.
El espacio de trabajo, W, de un robot es la imagen, por el modelo directo de posición, f(q), del dominio de configuraciones accesibles en el espacio operacional:
W = f (Qa)
(1.10)
El espacio de trabajo accesible, Wr , de un robot es el conjunto de puntos del
espacio cartesiano que pueden ser alcanzados por un punto de referencia del órgano terminal con al menos una orientación de éste.
El dominio de configuraciones libres de un robot se define como:
Ql ≡ q
{
∈ Qa M(q) ∩Eo =∅}
donde:
M(q) es la región del espacio físico ocupada por los eslabones del robot,
Eo es la región del espacio físico ocupada por los obstáculos del entorno del
robot. (1.11)
x
y
q
1q
2q
3( a )
q
3q
1q
2q
1 maxq
3 maxq
2 max( b )
Figura 1.4. (a) Esquema cinemático de un robot de 3 grados de libertad, y (b) representación de su dominio de configuraciones accesibles.
El espacio de trabajo libre, Wl, de un robot, está definido como la imagen, por
el modelo directo de posición f(q), del dominio de configuraciones libres en el espacio operacional; es decir que:
Wl = f (Ql)
1.3.4 Configuraciones asociadas a una tarea.
El conjunto de configuraciones de un robot asociadas a una tarea ℑ está definido por
( )
{
∈ℜ = ∀ ∈ℑ}
≡ ℑ i i i n i x f q x q Q , (1.13) donde:qi es el vector de las variables articulares que definen la configuración del
robot en el instante ti.
f(xi) es el modelo geométrico directo del robot aplicado a la configuración
instantánea qi.
Se observa que Qℑ es la pre-imagen de la tarea en el espacio de coordenadas articulares.
1.4 ASPECTOS DE UN ROBOT [Borrel, 1986]
Los aspectos de un robot son los sub-dominios Ai ∈ ℜn (i = 1,2,..., nA) tales
que:
a) Ai ⊂ Qa
b) Ai es conexo
c) ∀ q ∈ Ai ninguno de los menores de orden m extraídos de la matriz
J(q), definida precedentemente, es nulo, excepto si ese menor es nulo
para toda configuración en Qa.
Un aspecto identifica una familia de configuraciones que definen una clase de funcionamiento de un robot. Los conjuntos de configuraciones que anulan al menos un menor de orden m extraído de J(q) generan hipersuperficies en las fronteras de un
aspecto, que dividen al hiperparalelepípedo que representa al dominio Qa en el
espacio euclidiano. Cada hipervolumen delimitado por estas hipersuperficies corresponde a un aspecto del robot. En la Figura 1.5 se aprecia una representación de los aspectos del robot de la Figura 1.4.
Se observa que un aspecto Ai es un conjunto abierto pues las configuraciones
q* que definen sus fronteras (aquellas que anulan al menos un menor de orden m extraído de J(q)) no están contenidas en Ai. Ahora bien, se sabe de la teoría de
topología, que el conjunto cerrado conteniendo estas fronteras es denominado la
adherencia del conjunto Ai. Se designa entonces mediante Ai* a la adherencia del
aspecto Ai. A partir de esta observación A. Pámanes [Pámanes, 1992] introduce las
siguientes definiciones:
• Configuraciones suplementarias.
El conjunto Qi* de configuraciones suplementarias de un aspecto Ai es
el conjunto de configuraciones que se deben añadir a Ai para obtener su
adherencia Ai*; es decir: Ai* = Ai ∪ Qi* A1 q1 q2 q3 A2 A3 A4 A5 A6
Figura 1.5. Partición del dominio de configuraciones accesibles del robot de la Figura 1.4 en aspectos.
Notas:
¾ Las configuraciones q* ∈ Qi* son tales que al menos un menor de
orden m extraído de J(q*) es nulo. En consecuencia, J(q) es singular para toda q en Qi*. Las configuraciones q* ∈ Qi* son llamadas
singulares.
¾ El conjunto de configuraciones suplementarias de un aspecto Ai separa
este aspecto de los otros en el dominio de configuraciones accesibles. Esto implica que el robot debe pasar por una configuración suplementaria para cambiar de aspecto.
• Aspectos adyacentes.
Se dice que dos aspectos, digamos Ai y Aj , son adyacentes si y sólo
si Ai* ∩ Aj* ≠∅, donde Ai* y Aj* son las adherencias de Ai y Aj
respectivamente.
• Configuraciones de transición.
El conjunto de configuraciones de transición entre dos aspectos adyacentes Ai y Aj está definido como:
Qt*i, j = Ai* ∩ Aj* (1.14)
Nota:
¾ Toda configuración qt* ∈ Qt*i, j pertenece a los conjuntos de
configuraciones suplementarias Qi* y Qj*, y permite el paso directo del
aspecto Ai al aspecto Aj.
1.5 ACCESIBILIDAD A UNA TAREA [Pámanes, 1992]
Se dice que una tarea especificada, ℑ , es accesible a un robot si y sólo si al menos una de las siguientes dos condiciones de accesibilidad puede ser satisfecha:
a) Existe al menos un conjunto de configuraciones Qℑ del robot asociadas a la tarea ℑ , y al menos un aspecto Ai del robot tales que:
a.1) Qℑ ⊂ Ql
a.2) Qℑ ⊂ Ai*
b) Es posible definir ns (ns> 1) sub-tareas ℑk de ℑ tales que:
b.1) ℑ=
U
sn
k 1=
ℑk
b.2) ∀ k ∈{1 , 2 , ..., ns }, el conjunto Qℑk de las configuraciones del robot asociadas a la sub-tarea ℑk satisface las condiciones a.1 y a.2.
b.3) ∀ k ∈{1 , 2 , ..., ns-1}, los aspectos Ai (k) y Aj (k+1) son adyacentes
( i , j ∈ [1 , 2, ..., nA]).
b.4) ∀ k ∈{1 , 2 , ..., ns-1}, qo (k+1) = qf (k) ∈ Qt*k, k+1.
donde:
Ai* es la adherencia del aspecto Ai del robot.
Ql es el dominio de configuraciones libres del robot.
Ai (k) es el aspecto del robot que satisface la condición a.2 para la
sub-tarea ℑk.
qo (k+1) es la configuración del robot en el punto inicial de la sub-tarea
ℑk+1
qf (k) es la configuración del robot en el punto final de la sub-tarea
ℑk.
Qt*k, k+1 es el conjunto de configuraciones de transición entre los
Nótese que la condición a de accesibilidad se refiere a la realización de tareas
sin cambio de aspecto, mientras que la condición b concierne a la ejecución de tareas
utilizando más de un aspecto del robot. En trabajos previos se han propuesto métodos para la planificación de movimientos de robots para la realización de tareas utilizando más de un aspecto, tanto en robots no redundantes [Pámanes, Cuan y Zapata, 2001] como en redundantes [Pámanes y Zapata, 2003].
1.6 CONCLUSIÓN.
En este capítulo se revisaron conceptos fundamentales de cinemática de manipuladores que se aplicarán a lo largo del presente reporte. Se evocaron nociones relacionadas con el modelado cinemático de robots y con la redundancia cinemática. Asimismo, se examinaron las condiciones de accesibilidad a una tarea, las cuales serán particularmente importantes en las formulaciones de los métodos que se proponen en esta tesis para el cálculo del emplazamiento óptimo de una tarea. En efecto, tales condiciones permitirán garantizar la factibilidad de las soluciones que ofrezcan dichos métodos.
Capítulo 2
ÍNDICES DE DESEMPEÑO DE MANIPULADORES
2.1 INTRODUCCIÓN.
El propósito fundamental de la cadena cinemática de un manipulador robótico es el de conducir al órgano terminal en el espacio con un movimiento controlado que le permita realizar su tarea de manera eficiente en el entorno de trabajo. Diseñadas bajo este principio, las diversas arquitecturas típicas que se utilizaron para los robots desde su aparición en el sector industrial han venido funcionando en la realización de múltiples tareas. Sin embargo, con el paso del tiempo, en varios trabajos científicos se probó que existen ciertas configuraciones de esas arquitecturas que originan un desempeño pobre del robot. Paul y Stevenson [Paul y Stevenson, 1983] calificaron como degeneradas a tales configuraciones. El uso de éstas por un robot durante la ejecución de una tarea puede significar, por ejemplo, una operación excesiva de los actuadores, o la imposibilidad de realizar localmente algunos movimientos, o una baja precisión en el posicionamiento del órgano terminal.
La caracterización del desempeño cinemático de los robots mediante indicadores adecuados, además de permitir la identificación de las configuraciones degeneradas, ayuda a tipificar las configuraciones que, en contraste con las degeneradas, originan un funcionamiento óptimo del robot.
Los índices de desempeño cinetostático de robots que han sido presentados en la literatura científica se han aplicado al diseño de manipuladores, a la planificación de sus movimientos y al diseño de estaciones de trabajo. En esta tesis se utilizarán algunos de estos índices como criterios para el cálculo del emplazamiento óptimo de tareas de robots. En el presente capítulo se hace un compendio de algunos de los índices de desempeño más relevantes que se han propuesto.
2.2 ÁREA DE LA REGIÓN ACCESIBLE
El trabajo de Tsai y Soni [Tsai y Soni, 1981] es uno de los primeros en abordar el tema del diseño de un manipulador y de su estación de trabajo desde la perspectiva del desempeño cinemático. Los autores realizan un análisis de la región accesible de un manipulador de dos articulaciones rotatorias (2R) e identifican las configuraciones que ofrecen mayor y menor facilidad de desplazamiento del órgano terminal. La configuración más eficaz se obtiene cuando la segunda variable articular alcanza un valor de 90°; en las configuraciones más ineficaces dicha variable llega a 0° o 180°. En la Figura 2.1 se muestra la región accesible analizada por Tsai y Soni.
Región accesible para 0° ≤θ1 ≤60° 30° ≤ θ2 ≤120° θ1 θ2 l2 l1
Tsai y Soni también encuentran que, para rangos de variación fijos de las variables articulares, el máximo valor del área cubierta por la región accesible se alcanza cuando las longitudes de los dos eslabones (longitudes a de los parámetros de Denavit y
Hartenberg modificados) son iguales. Aunque el trabajo de Tsai y Soni se aplicó al diseño de robots y de estaciones robotizadas, estos autores no introdujeron explícitamente un índice de desempeño. Más adelante se verá que en su trabajo estaba implícito el concepto de la manipulabilidad, que sería introducido más tarde por T. Yoshikawa [Yoshikawa, 1985].
2.3 NÚMERO DE CONDICIONAMIENTO DE LA MATRIZ JACOBIANA
La teoría de propagación de errores en la resolución de sistemas de ecuaciones lineales sirvió de base a Salisbury y Craig [Salisbury y Craig, 1982] para proponer un criterio que les permitiera dimensionar y emplazar los pequeños manipuladores 3R que funcionan como dedos de una mano robótica. En efecto, estos autores consideraron el sistema lineal expresado por:
J T (q) f =
τ
, (2.1) La Ecuación (2.1) relaciona el vector fuerza f , ejercido por el extremo de unmanipulador, con el vector
τ
de fuerzas generalizadas suministradas por sus actuadores. Salisbury y Craig observaron que el error relativo de f está acotado de la siguiente manera: τ τ q J δ δ )) ( ( C ≤ f f , (2.2) donde: C(J(q)) es el número de condicionamiento de J(q)δ f es el vector error de fuerza en el órgano terminal
El símbolo || . || en la Ecuación (2.2) denota la norma euclidiana del vector argumento. El número de condicionamiento de J(q) se puede calcular dividiendo el mayor valor singular entre el mínimo valor singular de dicha matriz [Strang, 1980].
La Ecuación (2.2) permite apreciar la conveniencia de tener una matriz J(q) bien condicionada. En efecto, un pequeño valor de C(J(q)) ayuda a reducir la propagación de
los errores (por ejemplo, de redondeo) de las fuerzas generalizadas hacia la fuerza ejercida por el extremo del manipulador, propiciando así una buena precisión en el control de fuerza. Bajo este criterio resulta interesante diseñar el manipulador, y configurarlo al ejecutar una tarea, de tal manera que se minimice C(J(q)) . El menor
valor que puede tomar este número es 1; si los parámetros geométricos de un manipulador son tales que en la configuración óptima C(J(q)) es igual a 1, entonces se
dice que el robot es isotrópico y la mencionada configuración también es calificada como
isotrópica. Bajo esta configuración, la magnitud de fuerza que puede ejercer el extremo
del manipulador es la misma en cualquier dirección para un valor dado de || τ ||. En la Figura 2.2 se muestra un dedo isotrópico de una mano robótica, diseñado bajo el criterio de la minimización del número de condicionamiento de la matriz jacobiana de un robot; en la misma Figura se señalan los puntos del espacio de trabajo del dedo que pueden alcanzarse con configuraciones isotrópicas. Tales puntos también son llamados isotrópicos.
Figura 2.2 Dedo isotrópico de una mano robótica diseñado mediante la minimización del número de condicionamiento de la matriz jacobiana [Salisbury y Craig, 1982].
Nótese que la noción de condicionamiento de una matriz también puede ser utilizada para reducir el error relativo de velocidad articular en la resolución del modelo inverso de velocidad. En efecto, del sistema lineal expresado mediante la Ecuación 1.5 se tiene que:
donde: • x
δ es el vector de error de la velocidad del órgano terminal •
q
δ es el vector de error de. Las velocidades articulares
C(J(q)) es el número de condicionamiento de la matriz jacobiana
La Ecuación (2.1) permite apreciar que, si C(J(q)) es grande, un pequeño error en la especificación de x• (por ejemplo, debido al redondeo de sus componentes), produce un error relativamente grande en la solución, q• , de la Ecuación 1.5, lo que implica una disminución de la precisión en el control de velocidad. En consecuencia, una configuración, q , que minimice el número de condicionamiento C(J(q)) optimizará la precisión del control de velocidad.
El número de condicionamiento de la matriz jacobiana se ha utilizado de manera generalizada para el diseño, el análisis de singularidades y la planificación de movimientos de robots seriales y, más recientemente, de manipuladores paralelos [Daniali et al, 1995], [Zanganeh et al, 1997], [Alba-Gómez et al, 2005, 2006, 2007], [Moreno et al, 2006].
2.4 DETERMINANTE DE LA MATRIZ JACOBIANA.
Generalmente en los robots manipuladores existen determinadas configuraciones que hacen que su matriz jacobiana se convierta en singular. Tales configuraciones son llamadas singulares. Como se sabe, en ese caso no es posible resolver el modelo inverso de velocidad del robot. En consecuencia, una configuración singular incapacita localmente al manipulador para desplazar el órgano terminal en una cierta dirección del espacio cartesiano, lo cual le resta maniobrabilidad.
• • • • ≤ x x q J q q δ δ )) ( ( C (2.3)
La posibilidad de que un manipulador asuma configuraciones singulares durante la ejecución de una tarea fue planteada en uno de los primeros trabajos que trataron el tema de modelado cinemático de manipuladores [Whitney, 1972]. Varios autores, más tarde, se dedicarían a la caracterización de las configuraciones singulares de manipuladores; otros considerarían la prevención de configuraciones singulares y la facilidad de inversión de la matriz jacobiana como criterios para guiar el diseño de manipuladores.
Paul y Stevenson estudiaron las condiciones que determinan una configuración singular, en la cual un robot pierde su capacidad de reorientar el órgano terminal [Paul y
Stevenson, 1983]. Califican como degeneradas a las configuraciones que se acercan a
las configuraciones singulares, y utilizan el determinante de la matriz jacobiana como índice para identificar la degeneración:
ψ = det J(q)
(2.4)Así, una configuración es degenerada si se verifica que
ψ ≤ 0.5 (2.5)
En la vecindad de tal configuración el órgano terminal es muy poco sensible a los desplazamientos articulares del manipulador, lo cual dificulta la operación de éste. Evidentemente esta situación no es recomendable desde el punto de vista de la eficiencia de un robot en la ejecución de una tarea. En contraste, un manipulador que utilice solamente configuraciones definiendo valores relativamente altos de ψ trabajará de manera eficiente. En la Figura 2.3 se muestran los conos de degeneración correspondientes a dos arquitecturas de muñecas. Las zonas limitadas por esos conos son generadas por el eje de la última articulación cuando se verifica la condición (2.5).
Paul y Stevenson prueban que el máximo rango de trabajo posible de muñecas de ejes concurrentes se obtiene con α4 = α5 = 90°.
El análisis de Paul y Stevenson a partir del determinante de la matriz jacobiana resultó de gran interés para la prevención de las singularidades de muñeca en robots industriales. Particularmente en aquellos cuyas muñecas son de ejes concurrentes. Sin embargo, dicho estudio no se generalizó para la identificación de las singularidades generadas en otras partes de un manipulador; tampoco se estudiaron las singularidades de un manipulador redundante.
Figura 2.3 Conos de degeneración de dos arquitecturas de muñecas [Paul y Stevenson, 1983].
Dirección de la muñeca
Cono de degeneración trasero
Cono de degeneración delantero Dirección del manipulador
Zona nula Rango de trabajo Rango de trabajo Cono de degeneración delantero
Dirección del manipulador Dirección de la muñeca Cono de
degeneración trasero
2.5 MANIPULABILIDAD.
Para un manipulador de n grados de libertad cuyas velocidades articulares se restringen mediante
q
&
≤
1
, el dominio de velocidades realizables del órgano terminal esta definido por [Yoshikawa, 1991]:1
1•≤
• −x
JJ
x
T(
T)
(2.6)Esta expresión representa un hiper-elipsoide en el espacio Euclidiano m-dimensional, (siendo m el número de coordenadas operacionales), que es llamado elipsoide de
manipulabilidad [Yoshikawa, 1984, 1985], cuyo volumen es una medida de la eficacia
de la transformación de las velocidades articulares en velocidad del órgano terminal. En la Figura 2.4 se ilustra un mapeo del espacio de velocidades articulares al espacio de velocidades operacionales para un robot plano de dos articulaciones rotatorias. En el espacio articular se ha considerado la restricción
q
&
≤
1
. En el espacio de velocidades operacionales se muestra el elipsoide de manipulabilidad, que en este caso (m = 2) se reduce a una elipse.Figura 2.4 Generación de la elipse de manipulabilidad de un robot 2R mediante un mapeo del espacio de velocidades articulares al espacio de velocidades operacionales.
q 2 q 1 x 1 x 2
J
q.
x.
.
.
.
.
J
En la Figura 2.4 se observa que si el área de la elipse es grande, entonces los vectores x• en el espacio de velocidades operacionales serán relativamente grandes, lo
que significa que el al órgano terminal se puede desplazar fácilmente en cualquier dirección. En consecuencia, en el caso general, se tiene que la transformación de las velocidades articulares en velocidad del órgano terminal puede ser optimizada maximizando el volumen del elipsoide. Este volumen se puede calcular mediante:
v = k w ,
(2.7)donde el factor k es una constante cuyo valor depende de la dimensión m de la tarea:
( )
(
)
[
]
( )
( )(
)
[
]
⋅ − ⋅⋅ ⋅ ⋅ ⋅ ⋅ − ⋅⋅ ⋅ ⋅ ⋅ = − m m m m k m m 2 5 3 1 2 2 2 6 4 2 2 2 1 2 π πPor otra parte, la variable w , llamada por Yoshikawa índice de manipulabilidad,
se define de la siguiente manera:
)
det(
w
=
JJ
T(2.9)
Puesto que k es una constante, la maximización de w implica la del volumen del elipsoide, por lo que w se puede usar directamente como un índice de desempeño
que mide la facilidad de desplazar al órgano terminal en todas direcciones.
La magnitud del determinante de la matriz jacobiana utilizado por Paul (Sección 2.3) es equivalente al índice de manipulabilidad aplicado específicamente a la muñeca de un manipulador, en la cual además se verifica m = n. Dicho índice, por lo tanto, es una generalización del índice de Paul. Por otra parte, la configuración que brinda la máxima facilidad de desplazamiento del órgano terminal, identificada por Tsai y Soni en un robot 2R en un estudio previo (véase la Sección 2.2) es precisamente la que predice el índice de manipulabilidad. Se observa también que bajo una configuración singular de un robot la manipulabilidad es nula.
si es m un número par
si es m un número impar



![Figura 2.1 Región accesible de un manipulador 2R [Tsai y Soni, 1981].](https://thumb-eu.123doks.com/thumbv2/123doknet/8062212.270318/33.918.323.710.643.1005/figura-región-accesible-manipulador-r-tsai-soni.webp)
![Figura 3.1 Dimensiones y emplazamiento óptimos de un manipulador 2R obtenidos mediante la metodología de Tsai y Soni [1981].](https://thumb-eu.123doks.com/thumbv2/123doknet/8062212.270318/47.918.226.688.629.1031/figura-dimensiones-emplazamiento-óptimos-manipulador-obtenidos-mediante-metodología.webp)
![Figura 3.3 Accesibilidad a una tarea a partir del dimensionamiento y el emplazamiento óptimo de un robot 2R, aplicando un sub-espacio t-recorrible [Chedmail, 1990].](https://thumb-eu.123doks.com/thumbv2/123doknet/8062212.270318/49.918.365.585.631.967/figura-accesibilidad-dimensionamiento-emplazamiento-óptimo-aplicando-recorrible-chedmail.webp)
![Figura 3.5 Vistas ortogonales de la mano de Salisbury y Craig con emplazamientos óptimos de sus dedos [Salisbury y Craig, 1982].](https://thumb-eu.123doks.com/thumbv2/123doknet/8062212.270318/53.918.353.596.117.399/figura-vistas-ortogonales-salisbury-craig-emplazamientos-óptimos-salisbury.webp)