\
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
====***Jtfc=; = = = =
MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
~===***·~t=====
UNIVERSITE DE ANNABA
=======***;tfc=:=====
INSTITUT DE GENIE CIVIL
=======***~t=======
r/lESt'
cr
2 ((1":, l i ___ _Présentée
à
l'Institut de GENIE CIVIL
Pour l'obtention du grade de MAGISTER
=======***~t========
Par
Mr. BOURAS FAOUl!
rr===========1:1
THE M E
1:1=====
= = = = = ,
OEVELOPPEAIENT ET VALIOATION 0 'UN ELERENT
QUAORILATERE A 4 NOEUOS ET /2 0, L
EN ELERENTS fINIS
Soutenu publiquement le: /
/
Devant le Jury:REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
====****".
= = = = MINISTERE DE L'ENSEIGNEMENT SUPERIEURET DE LA RECHERCHE SCIENTIFIQUE =======***~-========
UNIVERSITE DE ANNABA
INSTITUT DE GENIE CIVIL
========****",========
THESE
Présentée
à
l '
Insti tut de GENIE CIVIL
Pour l'obtention du grade de MAGISTER
_ ... _-=****"'====
Par
Mr. BOURAS FAOUl!
rr========-=====I'"
TI NHE M E
Il'l===========;tIl Il
DEVELOPPERENT ET VALIDATION D'UN ELENENT
QUADRILATERE A"I NOEUDS ET
/2
0, L
EN ELENENTS fINIS
Soutenu publiquement le: / / Devant le Jury:
Président:
Mr. A.BOUMEKIK M.C U. ANNABARaporteur:
Mr. M.GUENFOUD Dr C.U.GUELMAExaminateurs:
Mr. A.SERIDI Pr C.U.GUELMAMr. K.DJEGHABA Dr U. ANNABA
REMERCIEMENTS
Ce travail a été fait sous la direction de Mr M. GUENFOUD
pour qui j'adresse tous mes remerciements de m'avoir encouragé tout au long de cette étude et pour m'avoir soutenu et éclairé de ces precieux conseils.
Je remercie vivement Monsieur A. BOUMEKIK maître de
•
conférence à l'université d'Annaba pour l'honneur qu'il me fait en
acceptant de présider le jury.
Messieurs A. SERIDI, O. HARIRECHE et K. DJEGHABA pour
l'intérêt qu'ils ont porté a ce travail en acceptant d'être
membres du jury, qu'ils trouvent ici l'expression de ma profonde gratitude.
DEDICACES
Je dédie ce
h~mbletravail
àMa très .chen:: mère
Mon père
Toute ma famille
Et
àtous mes amis
RESUME
Nous présentons dans ce mémoire la formulation et
l'évaluation d'un élément fini de plaque pour l'analyse statique et dynamique de plaques minces élastiques de formes quelconques.
L'élément développé est un élément quadrangulaire, possédant
4 noeuds et 3 degrés de liberté (D.L) par noeud, soit le
déplacement transversal et les deux rotations par ,rapport à deux coordonnées curvilignes orthogonales.
Nous décrivons les différentes étapes de la formulation de l'élément fondée sur une théorie linéaire des plaques, valable pour les petits déplacements , petites déformations et rotations
modé rées, et sur les hypothèses cinématiques de _~~E~~t::.~_~~
introduites sous forme discrète.
La matrice de rigidité linéaire, le vecteur sollicitation et la matrice de masse sont évalués par une intégration numérique de Gauss 2x2.
L'étude de nombreux problèmes statiques et dynamiques nous permet de mettre en évidence l'efficacité et la fiabilité de l'élément.
SOMMAIRE
*
INTRODUCTION
CHAPITRE
l
7
, ~-~, \ IlETUDE BIBLIOGRAPHIQUE
1- 1
ELEMENTSQUADRILATERAUX A
12D.L
1-1-2
DIFFERENTS ELEMENTS RECTANGULAIRES
1-1-3
ELEMENTS QUADRILATERAUX
CHAPITRE
II: FORMULATION ENERGETIQUE
11-1
11-2
FORMULATION ENERGETIQUE
PRINCIPES VARRIATIONNELS
CHAPITRE
III: CONSTRUCTION DE L'ELEMENT
Page 1 4 4 4 6 10 14 111-1
CONSTRUCTION DE Ku
22111-2
CONSTRUCTION DU VECTEUR CHARGE EQUIVALENT
27111-3
CALCUL DES EFFORTS RESULTANTS
27CHAPITRE IV: VALIDATION ET TESTS NUMERIQUES
IV-l PATCH-TEST 31
VI-2 TESTS DE ROBINSON 33 VI-3 T~STS DE CONVERGENCE POUR PLAQUES CARREES
ET RECTANGULAIRES 37
VI-4 PLAQUE COURBE AVEC RESULTATS EXPERIMENTAUX 50 VI-5 PLAQUE ENCASTREE AVEC RESULTATS EXPERIMENTAUX 59
CHAPITRE V: COMPORTEMENT DYNAMIQUE
V- COMPORTEMENT DE L'ELEMENT DKQ DANS LE DOMAINE DYNAMIQUE
CONCLUSIONS REFERENCES
CHAPITRE VI: ANNEXES
62
64 65
INTRODUCTION
Les plaques et coques constituent une catégorie importante de l'ensemble des structures rencontrées en génie civil. Leur analyse
nécessite une modélisation faite à partir d~éléments plats
triangulaires" ou quadrilatéraux. La méthode des éléments finis s'est avérée efficace dans l'analyse de la flexion des plaques
minces; offrant une grande souplesse d'emploi.
Une modélisation des plaques en éléments discrets présente un
grand intéret, vu que ces derniers possèdent comme degré de
liberté (DL) les variables essentielles des calculs à savoir: le
déplacement transversal ~ et les rotations ex et ey autour de X et
y ( fig .1 ) "\r'
Au cours de cette étude nous essayons de formuler un élément quadrilatéral nommé DKQ (Discret Kirchhoff Quadrilateral). Comme son nom" l'indique , cet élément nécessite une évaluation numérique
basée sur les hypothèses de Kirchhoff sous forme discrète.
L'élément quadrilatère est à 4 noeuds et douze degrés de liberté.
Ini tialement, nous allons présenté une petite synthèse des
différents éléments à 4 noeuds et à 12 DL ,ensuite nous présentons
la théorie de calcul afin de définir les fonctions d'interpolation
(~x et f3y) en fonction des variables nodales (les douze DL). La
partie théorique se terminera par l'établi~sement de la matrice de
rigidité et du vecteur charge équivalente ainsi que le calcul des efforts de flexion. Les tests en fin de travail auront pour but de démontrer la validité et les performances de l'élément formulé
(DKQ) .
1-%,w
-,
;---~--.~--
,-
-noeuo ...[~~
9:1
1•
,~ \,
\ \CHAPITRE l
1- ETUDE BIBLIOGRAPHIQUE
1-1 ELEMENTS QUADRILATEREAUX A 12 DL
L'intéret et l'importance de la flexion des plaques ont été à
l'origine de la formulation de plusieurs éléments plaques de flexion.Parmi les articles et les ouvrages qui présentent l'examen
de ces éléments, on se limitera bien sur aux éléments
quadr ilatéraux à 4 noeuds et douze DL soient: w, ex et ey au
niveau des 4 noeuds.
Notre interet portera sur les solutions pour plaques minces
associées au modèle de Kirchhoff-Love. où
,M
cisaillementtransversal est négligeable. ~
.=--1-1-2 DIFFERENTS ELEMENTS RECTANGULAIRESLes éléments rectangulaires ont été les premiers éléments à
quatre noeuds à être proposés pour l'étude de la flexion des plaques . L'un des premiers éléments rectangulaires fut proposé par Melos~ [21]. C'est un élément de type hybride (deplacement et contrainte), basé sur des considérations physiques en analogie
--7
avec le comportement des poutres croisées. L'ACM [22] [23]est un ~élément rectangulaire utilisant une fonction d'interpolation
cUbique complète en plus de deux termes d'ordre quatre (x 3y et
y3X ). Il
~st
implanté dans de très nombreux codes bien qu'il estincompatible. Certains tests de convergence marchent bien pour cet
élément. Dawe [24]va utiliser ensuite d'autres polynomes à 12
termes. Clough et Tocher [25]ainsi que Bogner .et Al.[26] proposent un élément compatible mais incomplet. En faisant intervenir quatre sous-régions triangulaires(fig.2), Deak et Pian [27]proposeront un élément rectangulaire compatible.
fig.2. Elément rectangulaire faisant intervenir quatre sous-regions triangulaires.
"
Les travaux de Kikuchi et Ando [28] sur ce type d'élément
utilisent des modèles déplacements hybrides. Leurs produits
présentent une convergence généralement meilleure ·que celle de' l' ACM. Les critiques des auteurs ( Mang et Gallagher ) [29] font douter de la fiabilité de ces éléments. Pian [30], et Severn et
Taylor [31] proposent également des éléments rectangulaires à
partir de fonctionnelles hybrides de type contraintes. Un autre
~ élément rectangulaire QC [32] a été proposé par Dhatt et qui est
basé sur l'introduction des hypothèses de Kirchhof f sous forme discrète.
L'objet de notre étude qui est le DKQ est justement une
généralisation de l'élément QC.
I-1-3 ELEMENTS QUADRILATERAUX
Ce type d'éléments peut être obtenu par assemblage d'éléments triangulaires à 9 D.L. Des matrices différentes seront cependant obtenues suivant l'orientation du découpage. (fig. 3)
Un élément quadrilatère Q-19 [33] de formulation identique à l'élément triangulaire HCT est complet et conforme. Il est obtenu par assemblage de quatre éléments triangulaires (eux-mêmes obtenus par trois sous-triangles) et nécessite une condensation statique de 7 D.L.
Des éléments quadrilatéraux basés sur un modèle hybride
contrainte ont été présenté par Allwood et Cornes [34] avec champ de contraintes linéaire, quadratique ou cubique, par Torbe et Church [35] avec champ de contrainte quadratique. Horrigmoe [36] utilise un
-F,s.
3.
f./Ult'tls
q
u,u'rtl ..
/~r
dU' 0
bhf!
uS par
OSSt",h/1I5"
dt.
frià'J
9
ILSélément avec champ de contraintes (moments) linéaire et déplacement transversal cubique pour l'analyse non linéaire de coques par facettes planes. Cook [37] étudie une grande variété d'éléments quadrilatéraux à 12 D.L de type hybride contrainte; qui sont obtenus par assemblage de quatre éléments triangulaires avec élimination du noeud milieu par condensation statique. Ces éléments sont basés sur la théorie des plaques avec cisaillement transversal et des polynomes différents sont utilisés pour représenter les contraintes et les déplacements (le long des
~
contours). Ces éléments permettent l'étude des plaques épaisses, sandwich, et minces mais les critiques des auteurs vont à l'encontre de leur fiabilité.
Dans la théorie de K1rchhoff, la compatibilité des éléments à formuler de type déplacement exige une continuité de type Cl (continuité de la 1è~e dérivée ) du déplacement transversal. Par contre la théorie des plaques épaisses (c.à.d. avec cisaillement. ) permet de formuler des éléments où la continuité nécesaire du déplacement w et des rotations de la normale de type Co. Si un modèle se comporte normalement pour les plaques minces où les cisaillements sont nuls, il y a avantage à utiliser cette dernière approche (dite de Mindlin ).
Le QUS4 est basé sur cette approche et a été proposé par Hughes et al [38]. Il se caractérise par une formulation simple et ses performances pour certaines plaques carrées; mais hélas leur comportement n'est pas garanti pour toutes les situations. Un élément isoparamétrique (avec cisaillement transversal ) QUAD 4 de Nastran proposé par Mac Neal [39] est modif ié par un ensemble de techniques telles que: intégration réduite, séléctive, addition de termes correctifs pour la flexion ... Ces techniques sont basées sur des résultats effectifs remarqués sur un élément de poutre.Cet élément ne se comporte pas bien aux deux tests proposés par Robinson mais atteint une très bonne performance pour l'analyse des plaques carrées et rectangulaires.
-Enfin, Robinson et Haggenmacher [40] proposent un élément LORA de type contrainte (force à 9 paramètres indéterminés.Des transformations permettront de repasser à des D.L. de type déplacement. La formulation est faite à partir d'une série de tests de Robinson. La performance de cet élément est bonne pour l'ensemble des tests sauf un.( flexion génée
CHAPITRE II
B
II 1- FORMULATION ENERGITIQUE
Dans ce chapitre, nous allons rappeler brièvement le principe
énergétique de base pour la formulation de l'élément DKQ.
Les résultats de la théorie linéaire de l' élastici té des
plaques ne font pas l'objet de cette partie
1ils seront donc
utilisés sans démonstration.
On définit l'énergie de déformation d'un corps élastique
déformable soumis
àun système de forces exterieures; comme étant
le travail emmagasiné dans le corps sous forme d'énergie:
U
= 1/2J<
a • t:: + a • t:: + a.
( + L • '1 + L . '1 + 1: . '1). dV
x x y y z z xy xy xz xz yz yz
V
U
Energie de déformation totale pour un élément 3-D.
De
façon
générale pour
N éléments et en
tenant compte
du
cisaillement
N / U=
L \'
U;m + e" 1 ( 2 ) eU
fm :Energie interieure de déformation de flexion de membrane au
niveau de l'élément.
Energie interieure de
déformation due
au cisaillement au
niveau de l'élément.
Nous allons donc écrire pour les plaques :
U:
=
1/2J
< "1 >. [D c ] .{'I }.
dA
eA
e(2.a)
Pour le cas des plaques bi-dimensionnelles, homogène et isotrope
avec un problème de contraintes planes nous avons :
[ D m ]
=
[ 2 12(1-v ) E h 1 v[
~
v[
1 (1_v2 ) 0 0 D] =
E h k c 2.(1+v) v 1o
0 0 (1-v)/2P
q
]
( 3 )Avec E,
v,h, k respectivement: module de Young, coefficent de
Poisson, épaisseur et le facteur de correction du cisaillement
transversal ( pris généralement égal
à 5/6 ),vu la distribution
non uniforme du cisaillement
àtravers l'épaisseur.
Ae:l'aire de l'élément.
Nous allons maintenant définir les déformations dûes aux
effets de
flexion~demembrane et de cisaillement.
Considerons une plaque (fig.
4 )soumise
àdes charges axiales de
compression ou de tension en plus de charges transversales et est
rapportée
àun système d'axe cartésien. Le plan
X Y est le plan moyen
de la plaque. Les déplacements d'un point de
peuvent s'écrire en série de Taylor:
coordonnées ( x, y,
z )
2 U( x, y, z = U ( x, y, 0 ) + (~ ~
)o.z + V( x, y, z )=
V (x,
y, 0 ) + .(a
a Vz )
~.z
+ 1/2En supposant que:
W (x,
y,z )
=
W (x, y,
0Et en posant
t--
L~_~~~_=_
a
U "--"-~-~---~av~-~..
~~~(_
..
~z_
U)
~
=
J3
yI
x,
y, 0=
U V (x,
y, 0 )=
Vet W (
x,
y,0 )
=
W
! . - 11.. ~
On aura en limitant les développement aux termes linéaires et en
négligeant
c z (àpartir des relations d'élasticité) ce qui suit
a
fJ=
a
u
+
z
xa
x .ax
x 8 fJ yay
( 6 ) lXYa
u
a
v
=
a
y + ax
+z.
""xz=
fJ xa
w
=
fJy +a
y L~~, <.'"Où
c i e x yi "" xy 1 lyZet
""xzsont les déformations en un
point .de coordonnées ( x, y, z
et
fJ"{,
fJt ~ontyles rot a tions
de la normale ( ou bien rotation des plans YZ et XY autour de X
et Y respectivement) (fig 5 ).
W étant le déplacement transversal.
D'après les relations cinématiques
décomposition suivante :
6 ) et ( 7 ) on aura la
Déformation de membrane
- - -
---< C RI 8 U >
=
< 8x
8 V 8 YDéformation de flexion
- - - -
-8 fJ x 8 fJ y
-< (.
>
=
<
-8 -,-fx
ay
Déformation de cisaillemnt
- - - -
--( "" >=
< fJ x + - -8 W 8x
( 8. a ) 8 fJ 8 fJ x + _ _y>
ay
8x
( 8. b ) > ( 8.c )
Suivant les hypothèses de la théorie des plaques on néglige les
effets d'interaction de membrane et de flexion. Ce qui
\ à
ignorer les contraintes dans la surfaçe moyenne
~
( membrane ), donc nos déformations se réduisent
à :.
.:::
)
'"
- 13
a
{3 . xax-a
{3 yay
( 9 )a
{3a
{3 x + _ _ yay
a
x
Et les moments de flexion et les efforts de cisaillement
{ H } ; (
:J ; [
D f 1 .{< }
(10a)
=[D
c ]
.
( 10 b )(voir fig. 4 )
II 2- PRINCIPES VARRIATIONNELS
I I 2-1
Principes variationnels usuels en élasticité
Les problèmes de physique mathématique ou appliquée se posent
à
l'ingénieur de deux manières de formulation: locale ou globale.
Alors que certaines méthodes numériques, comme celle des
différences finies s'appliquent aux problèmes physiques sous forme
locale, nous nous sommes intéressés
àla méthode des éléments
finis pour une formulation globale. Cette dernière fait appel aux
principe variationnels dont voici les plus importants et les plus
connus.
al Principe de variation des déplacements,
appelé aUSSl
"pr,incipe du minimum de l'énergie totale
y
\\\,1-,.\
bl principe de variation des tensions qui est le "principe du
m~um de l'énergie complémentaire "
j'
Du fait de la nature de nos travaux nous utiliseront le
" ' . .-principe du minimum de l'énergie totale.
z,w
..
1
J ' ( , ""or ... ~ t GCtor '" c(.
'j,v
II 2-2 Equations d'élasticité linéaire:
Soit un corps solide déformable, dont la géométrie définit un
domaine V et une surface extérieure( S ).
Le contour se compose de :
-Une partie S sur laquelle les déplacements sont imposés
u
-Une partie complémentaire notée
Sasur laquelle sont imposés
des forces exterieures
~.( voir fig.
6 ).1
Un rappel des équations d'élasticité est fait tout en les classant
en trois
catégo~iesi /
Equation de compatibilité : Elles définissent un champ de
déformation et des conditions aux limites sur S
~i j , k 1 + ~ le l , i j - E. i k , j 1
=
0En d'autres termes plus simples
( = 1/2 . ( D .. U. + D .. U i j 1 J J U
=
U isur S
u/
(--( 11 ) 11. a ) ( 12 )Les équations
11et
1 2 )exigent un champ de
déplacement continu et différentiable.
(1.
Remarque: Les déformations et les déplacements sont Eetits.
--,----,--~-~--''" ~i i /
Equations d'équilibre
Elles définissent un champ de
contraintes et les conditons aux limites sur
SaD.o .. + f.
=
0}
1 1 J . 1Dans
V ( 13 ) a i j = a j i cp = CP.-
a.n.
sur
Sa ( 14 ) 1 1 i j JAvec
f. )et
i. )
sont respectivement les forces de
1
1
volume et les forces exterieures de surface imposées.
i i i /
Lois de
comportement du milieu
Dans le cas de matériaux
àcomportement linéaire élastique;
on a une approche par modèle élastique linéaire de la loi de Hooke
qui est la suivante
(;
"FIGuQ.t -
06
-Avec C
ijk1:composantes du tenseur élasticité.
En notation matricielle les équations précédentes s'écrivent
-Equations de compatibilité
{ E }= [
1nJ. {
u }
{ u }
= {
u }
-Equation d'équilibre
~ [aJ {
a } + { fi }= {
0 } {~i
}= {
~
1 }-Loi de comportement
Dans
V
( 16 )Dans
V ( 17 ) ( 17 ) ( 18 )~
Par application du ;"Principe!'des travaux -virtuels on aura le
résultat suivant :
J
4> i ' 8 u ids
+J
sa
vOù 8 u. est le
1f .
8u dv
=
J
a '. 8u
'. dv
( 1 9 ) i i _ V iJ i ,J /- -- -, -vi
J.,,(~---'--- -- -- \...
},\:t)
~champ~
de déplacement cinématlquement
~---.
admissible.
En notant W le potentiel de déformation il vient
( 20 )
Pour
un
corps
solide
en
équilibre,
l'accroissement
de
l'énergie de déformation ( U
=
J
W. dv ) est égal
àla somme des
v
travaux virtuels des forces de volume
et de
surface pour
tout
accroissement virtuel admissible du champs des déplacements.
Remarque:
On
peut voir que
le potentiel de
déformation W
représente une densité volumique d'énergie de déformation W
=
~ ~
Ce résultat peut s'exprimer sous forme d'une condition d'extremum
si l'on admet que les forces de volume et'de surface dérivent de
potentiels.
POS
L
1:ton d'iquL(ibre
-7
~/\,G.
/ ,~.
~,ri cp,= -
a-l u. 1.
Le travail
'tdes forces appliquées est alors
Iv
t
...
"';," _ ...'t
=
-
G. dv
-
g. ds "
ou bien : 0 U
=
0
't ( 21 )Ce qui nous amène en introduisant l'énergie potentielle totale V :
o
V=
0 ( U - 't )=
0 ( 22 )L'équation (
22 )est une formulation du potentiel d'énergie sous
forme d'extremum ( stationnarité ).
II 2-3-
Principe de l'énergie potentielle:
Le principe de variation des déplacements s'annonce comme
suit
Il
Pour
un
cinématiquements
état
d'équilibre
admissibles
qui
stable,
les
déplacements
satisfont
les
conditions
d'équilibre, sont ceux qui minimisent l'énergie potentielle et
réciproquement ".
E:, , • lJSoit : 0 ( U -
't )=
0
Où :U=
J
0 " . V lJou, ,. dv
l , J=
J
VW (
E:" lJ ) .dv
est l'énergie totale de déformation exprimée
- 19
-( 23 )
Et
~
= -
I
f, .bu,.
dv -I
~,.
bu,.
ds ( 241 1 1 1
V
sa
~ est l'énergie potentielle des charges imposées à partir du
champ de déplacement compatible satisfaisant donc, aux conditions i/, ii/, 'iii/.
Dans notre thèse en discrétisant les équations ( 22 ), ( 23 )
et (24 nous parviendront à la construction de la matrice de
CHAPITRE I I I
-~. ' L - / ~
III 1- CONSTRUCTION DE Ko:
Etant donné que notre étude porte sur un élément de plaque mince, alors l'énergie interne de cisaillement transversal Usera
c
négligée devant l'énergie interne dûe à la flexion Uf .
Donc comme il a été cité auparavant, la formulation de l'élément DKQ est basée sur la discrétisation de l'énergie interne de déformation dûe à la flexion uniquement
~ Uf
=
L
Ue f e Au niveau élémentaire Ue=
1/2.J
< f. >. [ Df ].
{
[}
dx. dy ( 25 ) f A{ c } et [ Df ] sont données respectivement par les expressions
(9
et3).
allons essayer et le
{J, fJ
-"~ y
de trouver une relation entre les déplacement transversal w,
Nous rotations
recherchant un élément qui représente les caractéristiqu€~
tout en de type
.,
Kirchhoff i. e.- : d'une part les var iables nodales finales doivent être le déplacement transversal
w
et ses dérivées par rapport à x et à y (w,
w etw
)
aux quatre noeuds de l'élément; d'autre part., " . ,X,. . .. , y
l'_~ypothè~~ ~,e Kirch.h.9ff doit être satisf ai te le long du contour de l'élément.
l' \
l'>: ,.(Î( ]\ ~ \
Par souci de compatibilité de l'élément, les conditions ci-dessous sont retenues pour formuler la matrice de rigidité du DKQ
8
f3
x etf3
y sont définies par des polynomes quadra,tl.ç;l.uessurun élément 8
f3
x = ~ \' N i ' f3 xi i = 1 Où N. sont l coordonnées € et Tl qui l'élément de référence ). 8LN,.
fJ . hl 1 Y l ( 26 )les fonctions d'interpolation des sont les paramètres classiques sur
et j :: 2.. ~ • 41 1
'j ~ l2.,
2 3 .
-5 4 1 4 1-affeC?\eS aux noeuds sommets et aux noeuds milieux (
~JEn introduisant l'hypothèse de Kirchhoff on
al Aux noeuds sommets:
voir fig. 7 )
qJ2.tiJillt ... ':'
+ W{
'1}i
=r
x ; , x i} =
0 ( 27 )fJ
Yi
+ W , y i = 1, 2, 3, 4bl
Aux noeuds milieux
( 28 ) k = 5, 6, 7, B
S La
coordonnée le long du contour
(W,s=
~ ~
)
au point
kdu déplacement
Ci)
W, s kreprésente la dér i vée
transversal
w,
dont la variation est choisie cubique le long du
'''--'---''''
côté dont
kest le point milieu
w , 8 k
=
-3/2.
l ... ( 1 Jw
, l.- w .) -
, J 114 (w
( voir Annexe
lAvec
K=
5, 6, 7, Bmilieu des côtés
i j .Où i j
=
1, 2, 3, 4respectivement.
1 .. est la longueur
i j (fig. 5 )
o
~n
varie linéairement le long des côtés " 2, " , ,f3 k = 1/2. ( f3 .+ fJ .
n nI nJ
29 )
k
toujours égal
à 5, 6, 7, Best milieu des côtés
1, 2, 3, 4Le vecteur des variables nodales d'un élément DKQ est donc
<Un >. = < W 1
e
x1e
Y1En posant
W 2 ex 2~:L2""""
W 4 ; x 4 W,yet
e
y = .. ~~e
y4 > ( 30 )/ ( 31 ) ,---~--~-~~,-~~~,~-'""",...".---~ < . . ->-<~~~----~.-...-~._~e
et
e
sont les rotations autour
des
axes
x
et y
x y
respectivement (fig.
4 ).Ainsi nous avons établi des expressions de (
27 ) à (.31 )qui
vont nous permettre de trouver des variables nodales temporaires
fJX!
et
f3yi ( 26 )en foncton des composantes du vecteur {
Un }.Ce qui nous amène
àécrire pour les fonctions d'interpolation
#et
fJy :ç,
T) ) >J. {
Un } ( 32 )ç,
T) ) >Ou' < H
>=<
Hl...
Hl 2>e
t<
H > r< H ... H
1 1~ >sont
x x x y y y
les douze composantes du nouveau vecteur d'interpolation obtnues-
à·~.-partir des coordonnées des noeuds et des
< N >. ( voir Annexe
I Ifonctions d'interpolation
i Hl=
3/2 (as·N s
-
as,N s
Hl=
3/2ds,N
s -ds,N
B x y HZ= bs,Ns
+bs,N s
H2= -N
+e
S,N
5 +es,Ns
( 33 ) x y 1 3N -
(c
5·N
5cs·N s
H3b .. N
be·N
s H=
+=
- -x 1 y !ci SLes
fonctions
H4 HS Hb H4 HS , H6 ,sont
obtenues
des
x' x' x' y' y y
expressions (
33 )en remplaçant N
1par
N~et les indices s et
5par
Les
les
5et
6respectivement.
, 7 S 9 7fonct10ns
H , H , H , H , x x x yindices s et
5par
6et 7.
en remplaçant N
1par N
4et
E
f'
H10 Hl1 H12 H10 Hl1et
H1Zsont obtenues en remplaçant
n 1n
x ' x ' x ' y ' Y YN
1par N
3et les indices
5et s par
7et
respectivement.
Les facteurs rentrant dans les expréssions (
33 )sont :
x ..
1 J 2 2 2 CL=
(1/4x .. -
1/2 y .. )/1 .. .. I J IJ 1Je
=
(-1/2x
2 .+ 1/4 2 )/12 le I J Yij i j 3/4x .
y . 1 j i J 1. ) 1 J 2et
Avec
k = 5, 6, 7, Spour les côtés
12, 23, 34, 41 (fig. 7
Un calcul précis de < H
X >est présenté en Annexe II.
Ainsi une combinaison des expressions ( 33 ) et ( 9 ) donne
[ B ] matrice reliant les gradients aux
variables nodales.
-Elle est égale à : < H x,x
>
jll < H x.'ç
> + j12< H x ,1/ > [ B ] = < H y , y>
=
j 21 < H y , ç > + j22< H y ,1/ > <H x, y ; H Y,x>
jl1<Hy,ç> + j12<Hy ,1/>J
j Zl< +j22 <Où j .. sont les termes inverses de la matrice jacobienne de la
l J
transformation géométrique: [ j ]
= [
J ]-1.[ J
[ J
~
Nous avons donc :
[
x 12+ x34 + 1/ (X 12 + X34 ) y 21+] =
X3Z+ X 4 l + E, (X12 + x 34 ) Y32 +
] =
[
J 11 J 12 ]J 21 J 22
On tire les expréssions de j 11 ' j 12 / j 11 J22 j12 - J 12 = det [J ]
=
det [J j 21 - J 21 j 22 J 11=
det [J ] = det [J,
Où : det [J ]=
J11 · J 22 - J 21 0 J 12 et Xi j=
Xi - X j et Yi j=
Yi - Y j Les termes de < H 1:> / x,,> < H x/Tl > / Y34+ 1/ Y 12 + Y34]
=
Y41 + TI Y 1~: + Y:l4 ( 34 ) j 21 / j 22)
] ] 35 et < H > y,1/ sontfonctions de N. 1: etN. noElles sont définies en Annexe
II.
l ,':, l ,"
L'élément DKQ aura une matrice de rigidité définie par
. \.
,
l
1l
1 ,\[ K ] = o -1-1 \ ' \, ' T [ B ] . [ D ]. [ B ]. det [ J ]. dE,. dT) 0 \!i
cette'intégrale sera evaluée par la méthode de Gauss-Legendre nécessitant quatre points d'intégration ( 2x2 )III 2- CONSTRUCTION DU VECTEUR CHARGE EQUIVALENT:
L'énergie potentielle pour une charge à distribution uniforme q suivant z s'écrit pour un élément: z
U e
ext
=
qzJ
Ae W dAe=
< U n >L'interpolation de
w
n'étant pas définie sur l'élément lors de-
-la formu-lation de sa matrice de rigidité, nous aurions pu choisir une interpolation linéaire simple de w pour le vecteur charge équivalent.
Ainsi donc, nous avons considéré une interpolation plus plus deux termes du complet
complète avec un polynôme quatrième ordre, soit
ç
q3avec la formulation de la
cubique 3 et f, D,
matrice
ce qui apparai t plus cohérent de rigidité où des fonctions cUbiques ont été retenues pour w sur le contour de l'élément.
<
fe>
=
qJ
1J
1<
N
>
det [J]d~
di'z -1 -1
( 36 )
Cette intégrale est évaluée numériquement et les fonctions < N >
sont données en Annexe
IV
III 3- CALCUL DES EFFORTS RESULTANTS
Le vecteur { M } des moments (Eq. 10 a) est lié au vecteur de courbure { E } par la matrice élastique [ Dr ] .
{ M }
= [
Dr ] { E } ( 37 )Pour un point M de coordonnées x et y d'un élément, le vecteur { M } est obtenu connaisant le vecteur < U > : n
{ M }
= [
Dr ] { E }= [
Dr ] [ B (x ,y) ] { Un }Des valeurs différentes sont obtenues le long des frontières des éléments.
-Dans notre programme, le calcul de
{
M } est effectué au
centre de gravité, et/ou aux noeuds sommets de l'élément et/ou au
milieu des côtés de l'élément.
III 4- CONSTRUCTION DE LA MATRICE MASSE
L'expression de la matrice masse élementaire s'obtient en
considérant le travail virtuel des forces d'inertie
OWa .
( 38)
avec
p:
Masse volumique
.. e ( ) U. i=l,4
1
Composantes du vecteur accélération dans le repère
local lié
àl'élément.
Comme l'expression
37,nous allons écrire
( 39)
N :Fonctions d'interpolation données en annexe IV.
{ti
e}T
= { ü , ' y . , ·w·,ex'
e
Y1e
z}
Le travail des efforts d'inertie peut alors se mettre sous la
forme matricielle suivante:
La matrice masse élémentaire [ Me] est telle que
[ Me]
=
f
p<
N > T<
N >dv
ve
Ayant une épaisseur constante:
(40)
(41 )
1 1
,~~
\ .
La flèche w ( x, y ) n'étant pas définie de manière
continue
sur l'élément DKQ, il est alors nécessaire dans ce cas de
choisir
une interpolation pour celle-ci. Un
po~yn~l!'eHermit:ien peut
ce rôle. Ce dernier est basé sur le quadrilatère
àquatre
de continuité semi-C
1qui a comme pôlynome de base
jouer
noeuds
<
P>
=<
1 1; 11 1;2 1;11 112 1;3 1;211 1;112 11 3 1;311 1;11 3 >Les fonctions de forme ainsi que
leur~dérivées résultant' de
cette base p6lynomiale sont données en annèxe IV .
c.
L1l-\-h...r
l'Y) \.~"
Z;-'~
IV- TESTS NUMERIQUES DE L'ELEMENT DKQ:
Dans ce chapitre, nous allons présenter les ré sul tats de
plusieurs
test~numériques standards pour la convergence du DKQ et
d'analyses de cas pratiques. Une comparaison avec des résultats
expérimentaux est faite pour certains exemples.
Les résultats des tests numér iques font intervenir un ou
plusieurs
éléments
DKQ.
Parmi
les
problèmes
étudiés
les
l(;-o,..pS?J?j,tions de
~obinsonsont incluses. Notre intéret porte sur
les déplacements et les efforts M , M , M . Ces derniers peuvent
x y xy
être évalués en neuf points par élément
(au centre de gravité,
aux noeuds sommets et aux milieux des côtés.
IV-l PATCH-TEST
La formulation. théorique assure la compatibilité de l'élément
DKQ car les variables
(3xet
f3
yintervenant dans le
"principe"-"'~variationnel" sont continues. Donc, le problème proposé en (fig.8)
-conf irme la compatibilité de l'élément. C'est un assemblage de
cinq éléments DKQ qui modélisent une plaque rectangulaire reposant
sur trois appuis ( en 1,2,
I_.J-~Cette plaque est sollicitée aux
quatre coins de manière
àgénérer une distribution ( théorique )
unitaire des efforts M , M
1et M
x y xy
En résultat, nous obtenons
une répartition uniforme effective et unitaire pour
M
1pour différente valeurs de
vainsi que pour
xy
géométries.
- 31 -M, M 1et
x ydifférentes
Y
1
JJ Nl
1.0.-
1·-~.5
6
13L-Conditioni limitei ~ W·
0
OU~'l\oeUaS '.~ el 7SoLlitÎ1otàon. : My
=
b QU~ noeuds2
erB
MI • .&. .. "',. IUIII",d .. . t 1
""1
""aJM.sQ
""li-
noeeud .. ct2-M~ : - Q QUX ()oaud~ 1 et 8 p ~ -;
"
'lu oocCAd 8 ~...
p Cl lJ•
1(Ré~,"tofS: M" :1\\) -.: M4~ .. 1 co tou1 pOlot du r~ctal)9le lindép&od.ot d~ V)
lPou("
Q;'ZO, b-::.IO.E='COO.
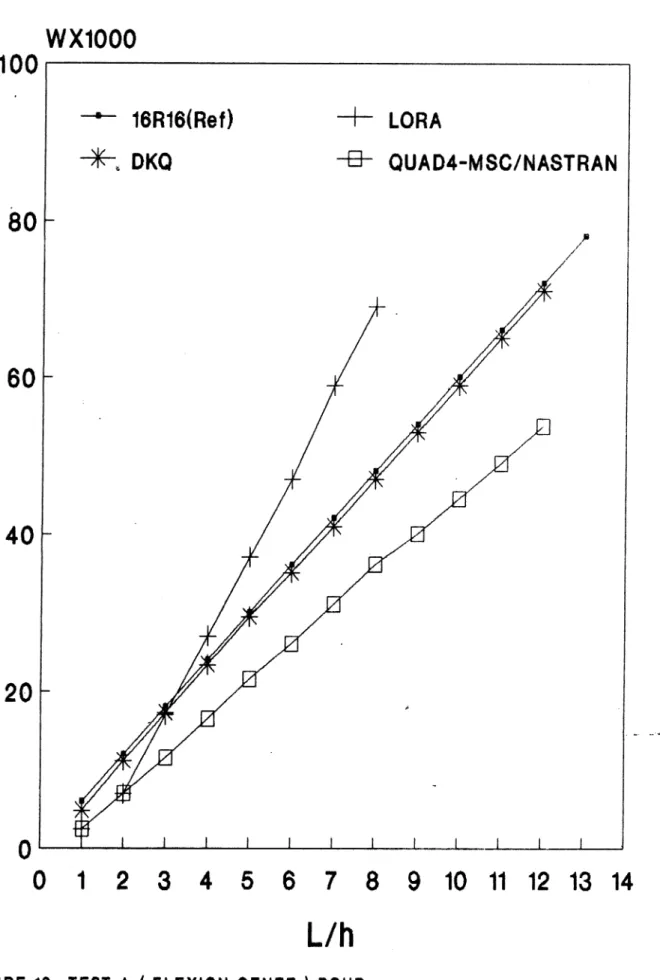
h::l,wa:: 1'2..4B aVec.IV-2 TEST DE ROBINSON :
-Dans cette partie, on s'intéresse aux deux problèmes proposés par Robinson. On prend un seul élément rectangulaire encastré le long d'un côté (fig. 9 ). les caractéristiques sont: largeur b =1 épaisseur h
=
0.05, E=
107 , V=
0.25. L'influence du rapport L/hallant de 1 à 104 est étudiée pour deux types de
sollicitations.L~ test A est défini par l'action de deux couples M
=
1 appliqués aux noeuds 2 et 3 pour la flexion génée. Le testy
B est caractérisé par l'action de deux charges concentrées p
=
1x
agissant en sens opposé aux noeuds 2 et 3 ( torsion génée ). les
valeurs obtenues pour W J suivant L /h sont reportées dans les
graphes des figures 10 et 11 pour les deux types de sollicitations.
-7
WX1000
100~---~80
60
40
20
- + -16R16(Ref)
+-.
OKQ
-j-
LORA
-B- QUA04-MSC/NASTRAN
o
L . . - - . . . L . - - - - L - - - - L _ - ' - - - - L - - - I . . . - . l . . - - . . . L . - - - - L - - - L -.--L _ _ ..L_-'--~o
1 2 3 4 5 6 7 8 9 10 11 12 13 14
L/h
FIGURE 10- TEST A ( FLEXION GENEE) POUR
DIFFERENTS ELEMENTS A 4 NOEUDS
-WX1000
45~---~- - 16R16
40 .
-+
LORA
35
30
25
20
15
10
5
-+-
OKa
~aUAD4MSC/NASTRAN
O~~~--~~~--~~--~~~--~~~. 0
1 2
3
4
5
6
7
8
9 10 11 12 13
L/h
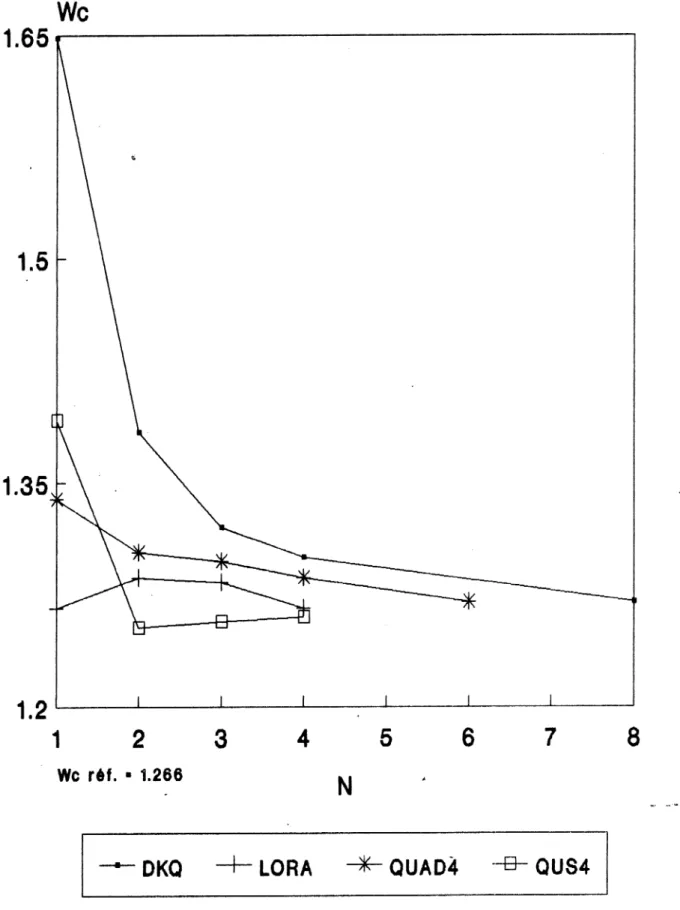
Nous présentons les résultats d'une série d'analyse de
plaques carrées et rectangulaires encastrées et simplement
supportées, soumises à une charge concentrée au centre .Les
maillages sur un quart de plaque sont associés à un découpage en N
=
l, 2, 3, 4 et 8 sections identiques le long d'un côté. lesrésultats obt~nus ( déplacement au centre et moments de flexion et
réaction ) sont comparés aux résultats que nous avons pu relever dans la littérature et concerant des éléments rectangulaires ou
quadrilatéraux à 12 D.L.( fig 12 et 13). Les solutions de
référence sont extraites de TIMOSHENKO
.(l'V-elL....s\)7""v-...:,.L,'-~
~ -\
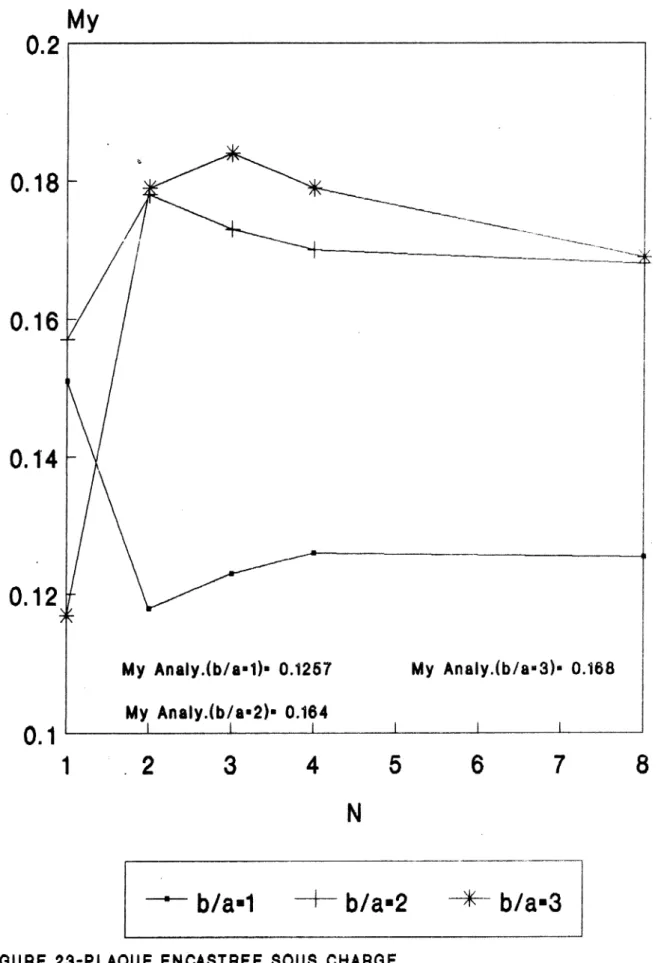
Les Figures 14 à 20 concernent les variations et les erreurs
---sur le déplacement au centre en fonction du découpage suivant les
différentes configurations géométriques, le chargement et les
condi tions aux bords, alors que les figures 21 à 23 concernent l'erreur sur les moments de flexion ou de torsion significatifs.
-0.72 . - - - ,
0.69
0.66
Wc
0.63
- - 0 K
Q
W Analy.- 0.6116 0.6~--~----~--~----~--~----~--~ f1
'---2
.~4-
5
-6
7
8
Wc
1 . 6 5 . . . - - - ,
1.5
1.35
1.2
1
2
3
4
5
6
7
Wc réf. - 1.266N
1
~DKQ
-+-
LORA
-+-
QUAD4
-8-
QUS41
FIGURE 13-PLAQUE SIMPLEMENT APPUYEE
(b/a-1).CHARGE CONCENTREE.DEPLACEMENT CENTRAL
- 39
- - OKT(A)
-+-
OKT(B)
4--
OKQ
0/0
Erreur
35~---~30
y
y
25
DKT(A) DKT(B)x
c
x
20
y
15
DKQ10
c
x
5
OL----L----~==~====d===~----~--~1
2
3
4
5
6
7
N.
8
0/0
Erreur
16~---~~
OKT(A)
-+-
DKT(B)
-+-
OKQ
14
12
10
8
6
4
2
o~~·~----~----~----~----~----~---1
2
3
4
5
6
7
N
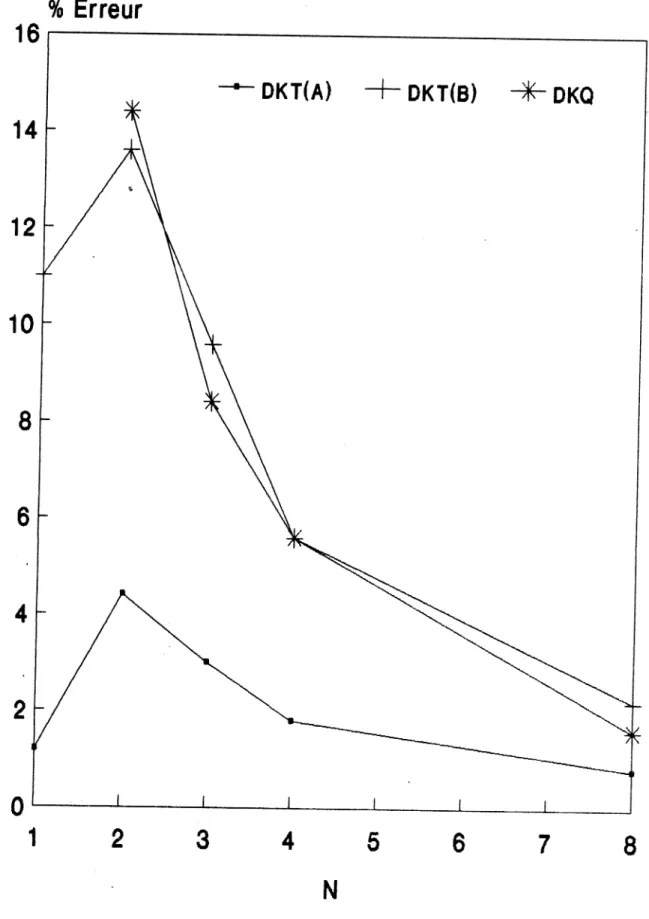
FIGURE 16-COMPARAISON SUR L'ERREUR DE LA
FLECHE ENTRE OKT ET DKQ.PLAQUE ENCASTREE CHARGE CONCENTREE (b/a-1)
- 41
Wc
2.1
1.9
1.7
1.5
'---_-'--_---L-_~ _ ___'_ _ _ _'____~ _ ___'1
2
3
4
5
6
7
W analy. • 1.803N
OKa
-t-
LORA
-+-
aUAD4
-8-
ACM
-*-
PIAN
Wc
1~---~0.,8
~---0.6
b
c
y
a
W Analy. • 0.788N
el2
V=
a,?>
x
0.4 '--__
~_
_ _ L . _ _ _ _ _ L _ _ _ _ _ ' _ _ _ ~ _ _ _ " _ _ _ _ _ '1
2
3
4
5
6
7
8
N
- - OKa
-+-
LORA
4-
aUAD4
-8-
aUS4
--*"
ACM
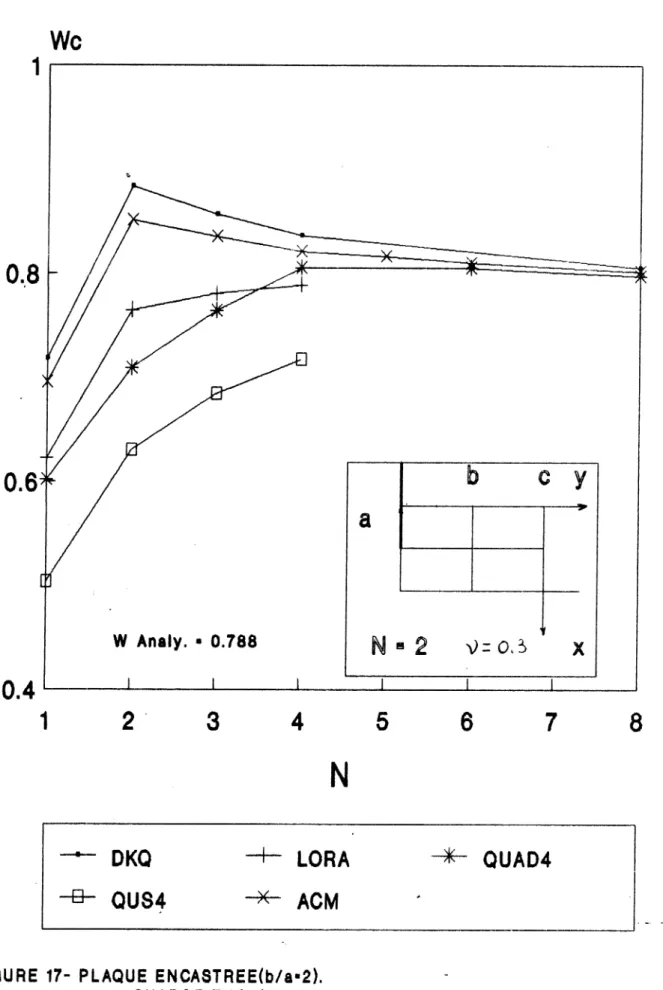
FIGURE 17- PLAQUE ENCASTREE(b/a-2).
CHARGE ENCASTREE.DEPLACEMENT CENTRAL.
-"0
Erreur
10
---o~~---~---~-10
-20
-30~--~----~--~----~--~----~--~1
2
3
4
6
N
-
LORA
-t-
aUA04
-+-
ACM
-8-
aUS4
--*-
OKa
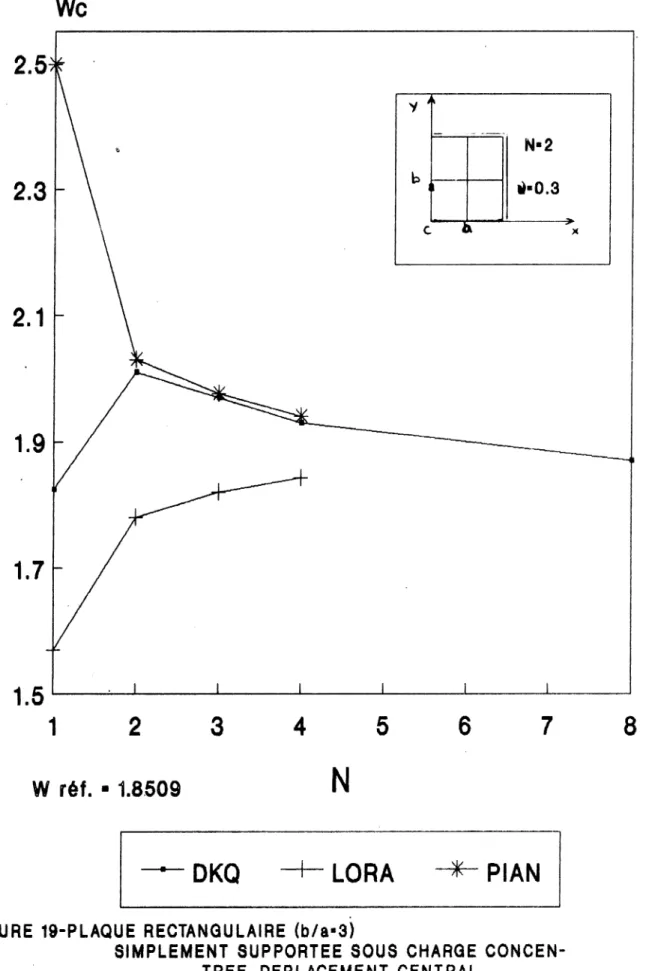
Wc
2.5
'1 ~ -N-22.3
bw-0.3
c. A )(2.1
1.9
1.7
1.
5
1 - - - : . - - 1 -_ _ --1--_ _ L - - - _ - - 1 -_ _ - L -_ _ L - - - _ - - - I1
2
3
4
5
6
7
W réf. • 1.8.509
N
1
~
OKQ
-+-
LORA
-+-
PIAN
FIGURE 19-PLAQUE RECTANGULAIRE (b/a-3)
SIMPLEMENT SUPPORTEE SOUS CHARGE CONCEN-TREE. DEPLACEMENT CçNTRAL
. - 45
W
0.9~---~0.8
0.7
0.6
0.5
0.4
L - - - _ - - ' -_ _ ....J.-_ _ L - - - _ - - - ' -_ _ ~ _ _ l . . _ _ _ _ l1
2
3
4
5
6
7
8
N
W Analy.- 0.791
IMxyl
0.06
f-~-~l
10.04
'10.02
o
-0.02
1
1 1 \1/ \l, .." ' l ' ' l ' Mxy Analy.(b/a-1)-0.0609 Mxy Analy.(b/a-2)· -0.03 Mxy ~naly.(b/,.·3)· -0.Q92
3
4
. 1 1 15
6
7
N
--- b/
a-
1
-+-
b/
a-
2
--*-
b/
a-
3
FIGURE 21-PLAQUE SIMPLEMENT APPUYEE SOUSCHARGE CONCENTREE REACTION AU COIN
-- 47
-\V
1·
~
OKQ
-+-
ACM
---*-
KA
%
Erreur sur R
16~---~ y R-12Mxy/PI-
B12
f-I
..
8
4
2
3
4
5
6
7
8
9
N
10
My
0.2~---~0.18
0.16
0.14
0.12
My Analy.(b/a-1)- 0.1267 My Analy.(b/a-2)- 0.164---
---~------...
\ My Analy.(b/a-3)· 0.168 0.1~--~----~--~----~----~--~--~1
.2
3
4
5
6
7
N
~
b/a-1
-+-
b/a-2
--+-
b / 4
FIGURE 23-PLAQUE ENCASTREE SOUS CHARGE
CONCENTREE-MOMENT D'ENCASTREMENT (My)
- 49
,
--r-
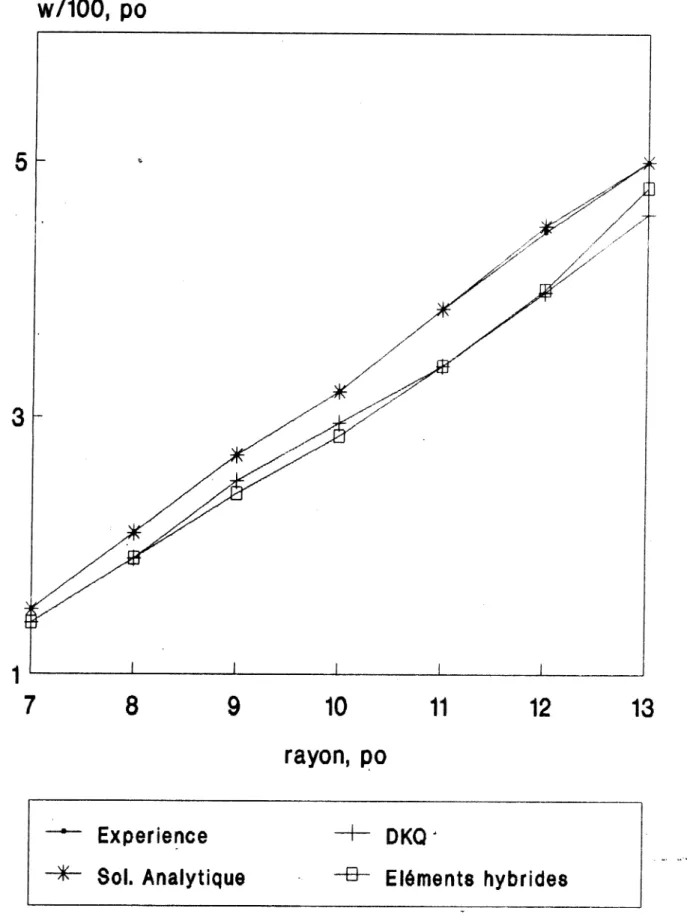
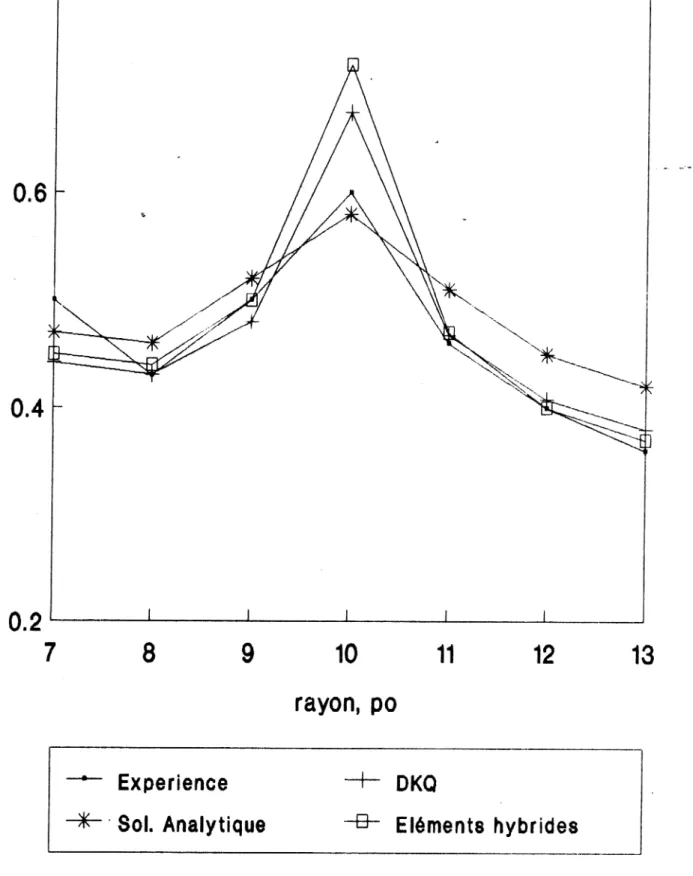
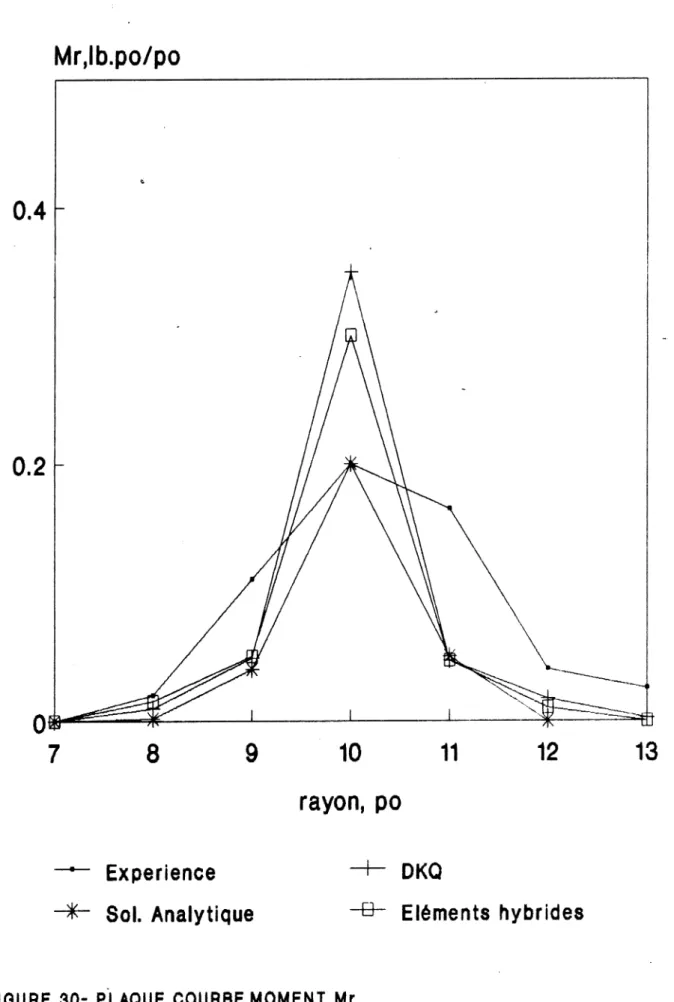
IV.::4_P~A.QU~ fOQR~E_AyEf gEÊ.U~T~T_EXPEgI!:!EN!AQX_:
COUL et DAS ont proposé une méthode analytique et ont
accompli des essais expérimentaux sur un pont courbe simplement
supporté le long de deux rayons et soumis à trois types de charge
concontrées. Les données mécaniques sont celles d'un matériau en plexiglas et sont indiquées sur la Fig.( 24 ). Cette plaque a été
étudiée égalemertt par ALLWOOD et CORNES qui ont fourni des
résultats numériques en considérant un maillage de 60 éléments
hybrides quadrilatéraux à 12 D.L ..
Nous avons également modélisé
découpage régulier en 60 élements DKQ
la dalle
(10 x 6
cCLŒbe avec un
entièr~. Les résultats reportés sur les Figures
sur la plaque
25 à 27
concernent les variations des déplacements w le long du rayon
central pour les trois cas de charge concentrée Fig. 24 ) et
les variations des moments de flexion M et M le long du rayon
f· t
B A
~roy/
V
1 CoractùistiqIJe!): E :r. 4.6 x. 105 Ib/po2. h =O./ü8po V:: o. j j Cf\Ot"gements: PA -=p{)-=p(..=1
lbFiS
2.4-_
PLAQUE COUf\8E. OONNE~S ET DEc.oUPAGE.-w/100,
po
1.7
1.2 '--_ _
. . J . - -_ _ - - ' - - -_ _ - - L -_ _ - - L . _ _ - - - - ' _ _ - - - '7
8
9
10
11
12
13
rayon, po
Experience
-t-
OKa
w/100,
po
5
3
1~----~---~----~---~----~----~7
8
9
10
11
12
13
rayon, po
Experie~ce-+-
OKa'
-+-
Sol. Analytique
-B-
Eléments hybrides
FIGURE 26- PLAQUE COURBE.DEPLACEMENT
SUIVANT ABC- CHARGE AU POINT B
-
~-11-w/100,
po
5
3
1~· ----~---~----~---~----~---~7
8
9
10
11
12
13
rayon, po
--
Experience
-t- OKa
Mt, Ib.po/po
1.2 , - - - ,
0.9
0.6
8
9
10
11
12
13
rayon, po
--
Experience
-+-
OKa
*""
Sol. Analytique
-tt-
Eléments hybrides
FIGURE 28- PLAQUE COURBE MOMENT Mt
SUIVANT ABC CHARGE AU POINT A
-Mt,lb.pO/po
0.8~---~0.6
0.4
0.2
'---~---~---'---~----'7
8
9
10
11
12
13
rayon, po
- - Experience
-t-
OKa
-*- .
Sol. Analytique
-8-Eléments hybrides
FIGURE 29- PLAQUE COURBE. MOMENT Mt
-Mr,lb.po/po
0.4
0.2
0
7
8
9
10
11
12
13
rayon, po
---
Experience
-f--
OKa
-*-
Sol. Analytique
-B-
Eléments hybrides
FIGURE 30- PLAQUE COURBE.MOMENT Mr
SUIVANT ABC CHARGE AU POINT B
-Mt,lb.po/po
1.2~---~0.8
0.4
o~----~----~----~---~----~----~7
8
9
10
11
12
13
rayon, po
Experience
+-
OKa
Nous présentons sur la Fig. 32 les résultats de l'analyse statique d'une plaque encastrée sur un côté, de forme parallélipédique et soumise à une charge uniforme répartie. Les flèches obtenues en six points sont comparées aux valeurs obtenues avec l'élément rectangulaire ACM avec les éléments triangulaires DKT et HSM. L'élément rectangulaire conduit à une erreur de discétisation géométrique relativement importante et il est de plus incompatible.
-ELEMENT MAILLAGE POINT 1 DKT 4 X 4 0.304
*
(41], [42] ( 2 . 4 ) HSM 4 X 4 0.264 [41],[42'] (11.1) ACM 6 X 8 0.296 [25] ( 0 .3 ) DKQ 4x
8 0.280 (6.1) VALEURS EXPERIMENTALES [25] 0.297 mo;II098 4 xa
avec:
OKQ DEPLACEMENT TRAVERSALPOINT 2 POINT
:3
POINT 4 POINT 5 POINT 60.198 0.113 0.121 0.056 0.023 ( 2 . 9 ) ( 6 . 6 ) ( 6 . 2 ) ( 0 . 7 ) ( 2 . 3 )
.
0.173 0.100 0.095 0.043 0.021 (15.2) (17.8) (26.4) (22.5) ( 5 . 5 ) 0.198 0.114 0.114 0.052 0.02 ( 2 . 9 ) ( 6 . 2 ) ( 6 . 2 ) ( 7 .1) (10.45) 0.202 0.114 0.114 0.053 0.02 ( 6 . 5 ) (6.2) ( 6 . 2 ) ( 7 .0) (10.45) 0.204 0.121 0.129 0.056 0.022*
Pourcentage d'erreur (en valeur absolue) par rapport aux ~aleursexperimentales.
FIGURE 32- PLAQUE ENCASTREE AVEC RESULTATS EXPERIMENTAUX.
CHAPITRE V
v-
COMPORTEMENT DE L'ELEMENT DKQ DANS LE DOMAINE DYNAMIQUE
Pour vérifier l'aptitude de l'élément à considérer les problèmes dynamiques, nous avons calculé dans ce chapitre les premières fréquences propres de deux structures pour lesquelles nous disposons de solutions analytiques ou expérimentales.
- La première structure considerée est une plaque carrée appuyée
simplement s~r les bords. Le tableau 1 donne les résultats
obtenus pour les modes (1,1), (1,3), (3,1) et (3,3) avec
différents maillages.
Il est à remarquer que notre élément présente une convergence satisfaisante vers la solution de référence.
- La seconde structure considérée est une plaque rectangulaire
encastrée sur tout le contour.
Nous pouvons également constater que les résultats concordent bien avec les solutions de référence.
* -
Présentation des deux exemples :- Plaque carrée simplement appuyée sur tout le contour
E
=
la
f) h=
0,0 a=
1 v=
0,3 a p 0,91575=
a- Plaque rectangulaire encastrée sur son contour
1
[1
L=
0,18 l = 0,13 h=
6 x 10-4 E=
2,07 X 10 ·11-L
p=
0,3 p=
7700 L - 63-CONCLUSIONS
Nous pouvons constater à travers la série de tests effectués
que l'élément (DKQ) évalué présente les caractéristiques
suivantes:
-Les résultats de l'élément DKQ pour l'analyse élastique
statique des plaques minces associée à la théor ie de Kirchhof f
sont performant~ et ce independamment du rapport longueur sur
épaisseur ( tests de Robinson )
-Le Patch-test est là pour verifier que la compatibilité de l'élément est assurée.
-Des rapports diverses pour des plaques rectangulaires
b/ a = 1, 2 , 3 présents dans l t analyse de celles-ci sous differents cas de charges et de conditions aux bords, donnent des résultats très fiables.
pqr
-Nous observons en fin, qu'un bon
le cas de plaque courbe et que
comportement est constaté
l'élément DKQ est très
intéréssant dans son comportement dans le domaine dynamique
( vibration libre ).
-En conclusion, nous pouvons remarquer que l'élément DKQ est très simple dans sa formulation et fiable e.t eff icace dans son comportement.
REFERNCES
1. BATOZ, J. L., DHATT, G., " Modélisation des structures par
éléments finis" vol.l. France.
2. BATOZ, J. L. ,et DHATT, G., " Modélisation des structures par éléments finis" vol.2. France.
3. BEN TAHAR, M., " Analyse élastoplastique des plaques et coques
m~nces par éléments finis ", Thèse de Doc. Uni v. de Compiègne. Paris Nov. 1981.
4. EL HADJ, S., M., " Instabilité é~astique des plaques minces par la méthode des éléments finis ", Thèse de maîtrise. Univ. Laval 1981.
- ,,',
....
-'-5. DHATT, G., et G.,TOUZOT, " Une présentation de la méthode des éléments finis", Maloine, S. A. Editeur, Paris, 1980.
6. BOUBERGUIG, A. ," Calcul statique des coques nervurées et
précontraintes " Thèse de Doct. Ecole
Polytechnique Féderale de Lausanne 1983.
7. AIT-ALI, L.," Développement d'éléments finis de coques pour le calcul des ouvrages d'arts"
E. N. P. C. 1984. Paris
8. IMBERT J. F " Analyse des structures par éléments finis
"
Paris: Cepadues Editions, 1979.9. BATOZ,
J.
L et LARDEUR, " A discrete shear triangular nine D.O.F. element for the analysis of thick to very thin plates "Int.
J.
Num. Meth. Eng. ,1989, Vol. 28 PP 533-56010. GUENFOUD M. et BOURAS F. " Influence des déformations dues à l'effort tranchant sur les fréquences de vibration de flexion des conduites " Seminaire d'études
Structures
etdynamique des structures.26
et 27 Avril 94 U.CONSTANTINE.-11. BATOZ J.L., DHATT G. " Eléments triangulaires simples avec
hypothèses de Kirchhoff-Love sous forme discrète pour
l'analyse linéaire et non linéaire des plaques,
coques surbaissées et coques profondes."
12. DHATT G., MARCOTTE L. , MATTE Y. " A new tr iangular discrete
Kirchhoff plate/ shell element "
Int. J. Num. Meth. Eng.,1986, Vol.23 pp 453-470
"
13. ROBINSON J. and HAGGENMACHER G. " LORA - An accurate four
node stress plate bending element "
Int. J. Num. Meth. Eng. ,1979, Vol. 14,
pp 296-306
... _ · ... i ....
u
N= 2 ,
14. FRICKER A.J. " An improved three-noded triangular element for
plate bending "
Int. J. Num. Meth. Eng. ,1985, Vol. 21, pp 105-114
15. LEE S. W. ,ZHANG J.C " A six node finite element for bending
fiInt. J. Num. Meth. Eng.,1985, Vol.21 pp 131-143
16. PRATHAP G. and WISMANTH " An optimally integred four-node
quadrilateral plate bending element
fiInt. J. Num. Meth. Eng. ,1983, Vol.19 pp 831-840
17. CARMELO MILETELLO and DANIEL H. CASCALES " Covar iant shear
strains interpolation in a nine-node degenerated
plate element "
Comp. Struc., 1987, Vol. 26, N" 5, pp 781-785
18. TORES J., SMARTIN A., ARROYO V. and DIAZ DEL VALE J.
IlA C
1finite element family for Kirchhoff plate bending "
Int. J. Num. Meth. Eng. ,1986, Vol.23 pp 2005-2029
19. CARPENTER N., STOLARSKI H., BELITSCHKO T." Improvements in three-node triangular shell elements "
Int. J. Num. Meth. Eng. ,1986, Vol.23 pp 1643-1667
20. BATOZ J.L.
"
An explicit formulation for an efficienttriangular plate-bending element "
Int. J. Num. Meth. Eng. ,1982, Vol.18 pp 1077-1089
21. MELOSH ,R.".," A stiffness matr ix for the, anal ys is of t hin plates in bending "
22.
Journal of International Sciences, Vol.28, N~ 34,
i961
ZIENKIEWICZ,O. C. ,CHEUNG,
for analysis of
slabs "
y . K., " The fini te elemen t rnethod
elastic isotropic and orthotrpic
Proc. Inst. Civ. Eng. ,Vol.28, 1964, pp 471-488
23.TOCHER, J.L., KAPUR,K.K., "Comment on basis of determination of matices for direct stifness method "
AIAA J., Vol.3, 1965, pp 1215-1216
24.DAWE, D.J., " Shell analysis using a simple facet element "
Journal of Strain Analysis Vol. 1 7, 1972,
pp 266-270
25.CLOUGH, R.W., TOCHER, J.L. l " Finite element stifness matrices
for analysis of plate bending "
Proc. Conf. Matr ix Methods in Struct. Mech. WPAFB, 1965, Ohio.
26.BOGNER, F.K., FOX, R.L., SCHMIT, L.A., "The generation of
inter-elementcompatible stifness and mass matrices by the use of interpolation formulae "
Proc. Conf. Matrix Methods in struct. Meeh. WPAFB, 1965, Ohio.