Utilisation de micropoutres sans couche sensible en vibration pour la détection d'espèces gazeuses - Réalisation d'un réseau gaz pilotable
Texte intégral
Figure
![Figure 1.2 : Multidisciplinarité dans la conception et la réalisation des microsystèmes [2]](https://thumb-eu.123doks.com/thumbv2/123doknet/5615590.135345/14.892.269.629.654.986/figure-multidisciplinarité-conception-réalisation-microsystèmes.webp)



![Figure 2.24 : Schéma des principaux composants d’une électrovanne tout ou rien de marque Asco [42]](https://thumb-eu.123doks.com/thumbv2/123doknet/5615590.135345/70.892.101.628.344.694/figure-schéma-principaux-composants-électrovanne-marque-asco.webp)


Outline
Documents relatifs
S’ajoutent à cela les paramètres thermodynamiques (tension, température, pression) et cinétiques (courant, diffusion des espèces) qui déterminent les réactions
Il exploite différents documents techniques (plan du réseau, schémas des équipements ou des pièces...), prépare les circuits des véhicules de surveillance et
Rappel : l'emploi de bouteilles de gaz ou de mélanges spéciaux est admis pour un usage ponctuel et temporaire, obligatoirement arrimés à un chariot mobile ou un râtelier.. Local
Cette intercomparaison a permis de montrer que dans le cas des mélanges gazeux de CO 2 dans l’ azote à 1·10 -2 mol/mol, à 10·10 -2 mol/mol et à 20·10 -2 mol/mol, les
Le soumissionnaire remet, comme pièce constitutive de son offre, un document par lequel il marque son engagement à mettre en œuvre
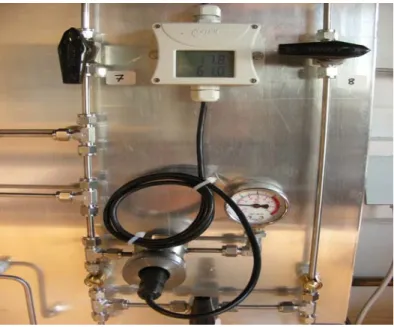
Le système représenté ci dessous est un dispositif automatisé qui permet de remplir du gaz dans des bouteilles
Comme le prévoit l'article 2 de l’Arrêté du 31 juillet 2018 relatif à la phase pilote de l'opération de conversion du réseau de gaz B, GRDF délègue les opérations de réglage
Etre capable d’expliquer la conservation de la masse lors d’une dissolution avec la notion de molécules. Connaître la notion de miscibilité (liquides miscibles ou non miscibles)
