Interface Cerveau Machine avec adaptation automatique à l'utilisateur
Texte intégral
Figure



Documents relatifs
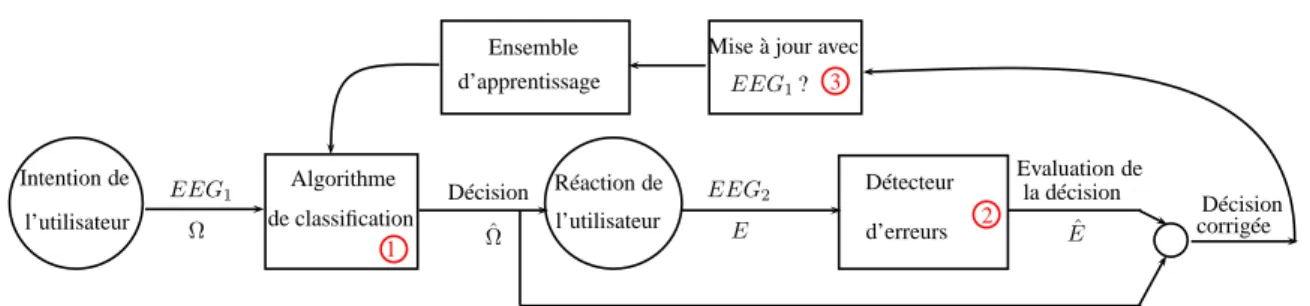
En comparaison aux méthodes de l’état de l’art, la méthode proposée offre de meilleures performances, permet de réduire le nombre de données nécessaires à la calibration et
Pour permettre le contrôle de la propagation des ondes électromagnétiques avec des angles d'incidences variables, on utilise des matériaux à BIP 2D (Figure I-13) [14], voire
For instance, we can use the cell counts derived from a methylomic dataset to establish a cell mixture composition and then correct the targeted transcriptomic data (e.g.
To study the effect of current density on the efficiency of electrocoagulation in removing DR 81 from synthetic textile wastewater several current densities in the range of 100 to
Schwartz, autre figure de proue de la recherche sur les interfaces cerveau-machine, a réussi avec son équipe à faire en sorte qu’un singe se nourrisse à l’aide d’une
Les applications récentes dans le domaine de l’analyse d’images notamment la reconnaissance d’objets telles que l’extraction de routes à partir des images
