Etude du double pas de calcul pour la simulation
numérique des réseaux électriques
Mémoire présenté
à la Faculté des Études Supérieures de l'Université Laval dans le cadre du programme de maîtrise en génie électrique
pour l'obtention du grade de Maître es sciences (M.Sc.)
DÉPARTEMENT DE GÉNIE ELECTRIQUE ET DE GENIE INFORMATIQUE FACULTÉ DES SCIENCES ET DE GÉNIE
UNIVERSITÉ LAVAL QUÉBEC
2011
Ce mémoire présente une étude sur la simulation en temps réel des réseaux électriques comportant des convertisseurs électronique de puissance, en utilisant deux pas de calcul différents.
L'impact du double pas de calcul sur la précision de la simulation est d'abord étudié à l'aide de SimPowerSystems (MATLAB) puis validé en temps différé avec Hypersim, le logiciel de simulation temps réel d'Hydro-Québec. L'impact est étudié par l'observation des formes d'onde, par l'analyse harmonique, ainsi que par les mesures de puissance au point de découplage, entre les deux parties du réseau.
La méthode de simulation à double pas de calcul pourrait être implantée, en temps réel, par l'utilisation d'une unité de calcul rapide dans Hypersim. La technologie FPGA « Field Programmable Gate Array » est considérée pour remplir cette fonction et ses caractéristiques sont passées en revue.
Je tiens à remercier mon directeur de recherche, Hoang Le-Huy de l'Université Laval, mon codirecteur, Louis A. Dessaint de l'École de technologie supérieure ainsi que Sylvain Guérette du laboratoire de simulation de réseau de TIREQ. Leur confiance, support et aide m'ont permis de mener ce projet à terme.
Je tiens aussi à remercier les membres du LEEPCI pour leur aide sporadique, discussions et camaraderie. Ce milieu composé de gens stimulants, intéressés et intéressants est le berceau de grandes idées.
Mes remerciements s'adressent aussi à la Chaire de recherche TransÉnergie pour le support financier des travaux.
Résumé 3 Avant-Propos 4 Table des matières 5 Liste des tableaux 7 Liste des figures 8 Chapitre I - Introduction 11
1.1. Historique de la simulation temps réel de réseaux électriques 11
1.2. Problématique et contexte 13 1.3. Description du projet de recherche 14
Description des apports 14 Organisation du mémoire 15 Chapitre II - Méthodes numériques de simulation de réseaux 17
2.1. Composants de réseaux 18 2.2. Équations de réseaux électriques 19
2.3. Génération des équations de réseaux électriques 20
Méthode nodale 20 Méthode des variables d'état 22
2.4. Méthodes d'intégration numérique 24 Discrétisation des composants linéaires : 25
Méthode EMTP 27 Discrétisation des équations d'état 28
Exemple de l'effet du choix du procédé d'intégration numérique 31
2.5. Méthodes générales de simulation numérique 35
Méthode générale EMTP (Hypersim) 36 Méthode générale par variables d'état (SimPowerSystems) 39
Chapitre III - Simulation numérique à plusieurs pas de calcul 41
3.1. Introduction au double pas de calcul 42 3.2. Problématiques du double pas de calcul 43
3.3. Résultats des études antérieures 44 3.4. Critères d'évaluation de la précision des résultats 46
3.5. Exemple d'un circuit monophasé 47
3.6. Conclusion 51 Chapitre IV - Simulation à double pas de calcul d'un réseau sans commutations 53
4.1. Méthodologie générale 54 4.2. Réseau avec charge passive découplée 56
4.3. Stabilité numérique 58
Méthodologie 58 4.4. Puissance non caractéristique 59
Méthodologie 59 4.5. Résultats de simulation et analyse 60
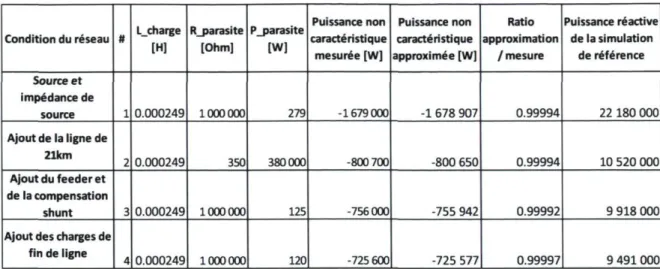
1 - Stabilité numérique et puissance non caractéristique dans le réseau 50-5jis 60
Estimation de la puissance non caractéristique 63
Discussion sur les résultats 63 2 - Étude de différentes configurations de point de découplage 64
4.6. Réseau avec deux sources de tension découplées 66
Analyse des résultats 71 4.7. Conclusion 72 Chapitre V - Simulation à double pas de calcul d'un réseau avec convertisseur de puissance
73
5.1. Convertisseur de puissance : D-STATCOM 74
Description du contrôleur 75 Partie lente du contrôleur (50us) 76 Partie rapide du contrôleur (5 us) 78 Impact du schéma de contrôle sur les fonctionnements possibles 79
5.2. Découplage du réseau et du D-STATCOM 80 5.3. Stabilité numérique avec commutations 81 5.4. Puissance non caractéristique avec commutations 82
5.5. Impact sur les formes d'onde 87 5.6. Impacts sur le fonctionnement du D-STATCOM 92
5.7. Conclusion 95 Chapitre VI - Implantation de la simulation à double pas de calcul dans Hypersim 97
6.1. Simulation à double pas de calcul dans Hypersim 98
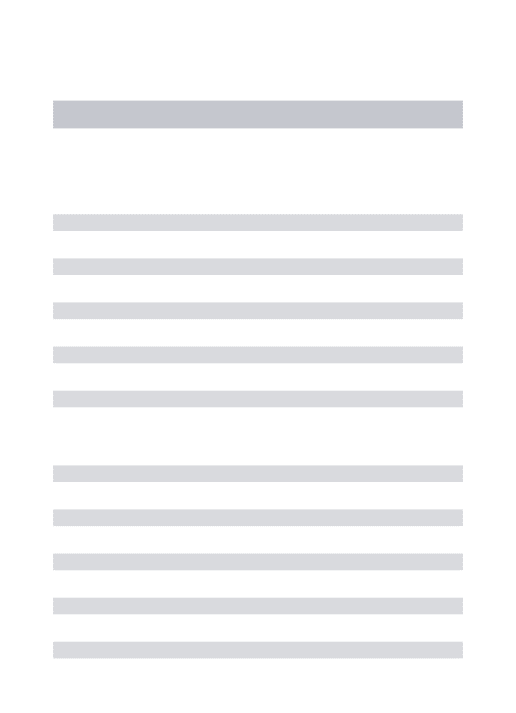
6.2. Résumé des essais 99 6.3. Cas 1 - Charge simple découplée 100
6.4. Cas 2 - Deux sources de tension découplées 103
6.5. Cas 3 - Charge avec commutations 104 j\nalyse des résultats de la charge avec commutations 111
6.6. Technologie FPGA 116 Algorithme d'intégration 117 Logique de fonctionnement - Optimisation des commutations 117
6.7. Conclusion 119
Conclusion 121 Bibliographie 125 Annexe A - Code UCM convertisseur 129
Tableau 1 : Résultats de simulation sur réseau à double pas de calcul (50-5 us) 61 Tableau 2 : Résultats de simulation pour le réseau à simple pas de calcul (50-50 (is) 65 Tableau 3 : Résultats de simulation pour différentes conditions de point de découplage ....65 Tableau 4 : Puissance non caractéristique provoquée par deux sources de tension
découplées 70 Tableau 5 : Résistance parasite limite avec commutations 81
Tableau 6 : Comparaison des résultats avec un condensateur au bus DC 84 Tableau 7 : Comparaison des résultats avec une source idéale au bus DC 86 Tableau 8 : Résultats obtenus avec l'ajout du filtre passe bas sur le contrôleur 93 Tableau 9 : Résultats de simulation Hypersim et SPS sur charge simple 101 Tableau 10 : Mesures de puissance en fonction de l'indice de modulation 115
Figure 1 : Circuit équivalent monophasé du réseau à étudier 19 Figure 2 : Modèles équivalents de L et C selon Euler arrière et la méthode du trapèze 25
Figure 3 : Modèle EMTP de l'inductance et du condensateur 27 Figure 4 : Circuit équivalent avec la méthode EMTP (dicrétisation trapézoïdale) 27
Figure 5 : Différentes formes de discrétisation avec SPS 30 Figure 6 : Circuit simple pour démontrer l'effet du pas de calcul et du procédé d'intégration
31 Figure 7 : Formes du courant avec différents procédés d'intégration, pas de 100 us 32 Figure 8 : Effet du procédé d'intégration, première bosse de courant, pas de 100 ps 32
Figure 9 : Effet du pas de calcul sur l'intégration par Euler avant 33
Figure 10 : Effet du pas de calcul sur Euler arrière 33 Figure 11 : Effet du pas de calcul sur l'intégration trapézoïdale 34
Figure 12 : Fonctionnement de l'algorithme SPS 39 Figure 13 : Réseau électrique comprenant un D-STATCOM avec double pas de calcul.... 42
Figure 14 : Circuit monophasé sans point de découplage 47 Figure 15 : Circuit monophasé avec point de découplage 48 Figure 16 : Échange des signaux - Séquence de fonctionnement 50
Figure 17 : Représentation Simulink du réseau complet 54 Figure 18 : Implantation du point de découplage au secondaire du transformateur 57
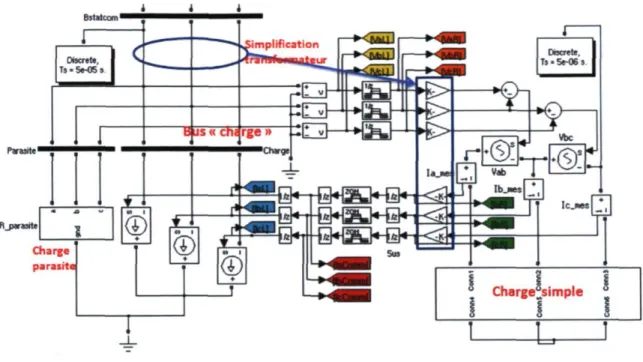
Figure 19 : Profil d'énergie mesuré de chaque côté du point de découplage 60 Figure 20 : Comparaison du courant « la » au bus « charge » du cas #4 62 Figure 21 : Réseau de référence pour étudier l'effet d'avoir deux sources 67 Figure 22 : Réseau avec deux sources simulées à double pas de calcul 68 Figure 23: Comparaison des courants « la » au bus « charge » pour « m=l.l » 69
Figure 24 : Tracé des puissances pour une variation d'amplitude 70 Figure 25 : Tracé des puissances pour une variation de phase 70
Figure 26 : D-STATCOM proposé 74 Figure 27 : Implantation haut niveau de l'algorithme de contrôle 75
Figure 28 : Partie lente du contrôleur (PLL, régulateurs, calcul consigne pour MLI) 76
Figure 29 : Détail du « Phase Lock Loop » de la Figure 28 77 Figure 30 : Partie rapide de l'algorithme de contrôle 78
Figure 31 : Générateur MLI 78 Figure 32 : Partie lente du contrôleur modifié pour enlever la régulation de Vac 79
Figure 33 : D-STATCOM avec point de découplage 80 Figure 34 : Profil d'énergie avec le condensateur comme bus DC 82
Figure 35 : Profil d'énergie avec la source idéale comme bus DC 83 Figure 36 : Comparaison de la mesure et de l'approximation de la puissance non
caractéristique 85 Figure 37 : Profil d'énergie dans la simulation de référence 85
Figure 38 : Comparaison du contenu harmonique de la tension « Va » au bus « charge » . 87
Figure 39 : Comparaison de la forme de la tension « Va » au bus « charge » 88 Figure 40 : Comparaison du contenu harmonique du courant « la » au bus « charge » 89
Figure 41 : Comparaison harmonique du courant « la », [9000 - 11 000 Hz] 90 Figure 42 : Comparaison des formes d'onde de courant « la » au bus « charge » 91
Figure 43 : Contenu harmonique du courant « la » au bus « charge » avec l'ajout du filtre93
Figure 44 : Schéma Hypersim avec double pas de calcul 101 Figure 45 : Réseau à double pas de calcul SPS pour la charge commutée 104
Figure 46 : Réseau de référence Hypersim pour la charge commutée 105 Figure 47 : Schéma Hypersim à double pas de calcul pour la charge commutée 106
Figure 48 : Courant « la » dans l'inductance de fuite dans les simulations de référence... 107 Figure 49 : Gros plan sur la première fausse amorce, courant « la » de l'inductance de fuite
dans les simulations de référence 108 Figure 50 : Gros plan sur la première fausse amorce, effet sur la tension « Va » au bus
« charge » pour les simulations de référence 109 Figure 51 : Courant « la » dans l'inductance de fuite dans SPS et Hypersim à double pas de
calcul 109 Figure 52 : Gros plan sur la première fausse amorce dans la simulation à double pas de
calcul 110 Figure 53 : Comparaison des courants « la » de référence, courant rapide et lent dans
l'inductance de fuite 111 Figure 54 : Comparaison du contenu harmonique du courant « la » dans l'inductance de
fuite 112 Figure 55 : Comparaison de la tension « Va » au bus « charge » dans la simulation de
référence et dans la simulation à double pas de calcul 113 Figure 56 : Comparaison du contenu harmonique de la tension « Va » au bus « charge » 114
Ce chapitre présente le projet de recherche. L'historique de la simulation de réseaux est premièrement présenté suivi d'une discussion sur la problématique actuelle. La description du projet et ses apports sont ensuite présentés.
1.1. Historique de la simulation temps réel de réseaux électriques
Les premiers simulateurs temps réel remontent au milieu des années 1950. Ils ont été développés afin de subvenir au besoin de tester des contrôleurs réels en rétroaction avec la simulation. On utilisait alors des simulateurs analogiques composés de sources CA et CC, de composants R, L, C, de modèles physiques de lignes et de machines électriques. Les simulations étaient réalisées avec un facteur d'échelle afin de faciliter la réalisation physique des composants.
Les simulateurs analogiques ont été une solution préférée pendant de nombreuses années. En fait, on a utilisé des simulateurs complètement analogiques jusqu'au milieu des années 1980. Il y a des désavantages aux simulateurs analogiques tels que le coût d'opération élevé, le volume encombrant, le temps de préparation important, la difficulté à représenter les non-linéarités [1], mais leur plus grande facilité à respecter le temps réel a poussé leur utilisation pendant de nombreuses années.
C'est vers la fin des années 60 que les premiers simulateurs numériques, en temps différé, ont été développés. Les travaux de Hermann Dommel sur TEMTP « Electromagnetic Transient Program » sont généralement considérés comme la pierre d'assise de la simulation numérique des réseaux électriques [2] [3]. À l'inverse d'une simulation en temps réel, une simulation en temps différé n'est pas contrainte sur le temps maximal pour retourner les résultats de la simulation. Comme le temps de résolution est lié à la puissance de calcul disponible, les premiers ordinateurs n'étaient pas adaptés à la simulation temps réel des réseaux électriques.
Les premiers modèles numériques destinés à de la simulation temps réel ont pris la forme de modèles simulés sur des DSP interfaces à un simulateur analogique par des convertisseurs analogiques numériques. On retrouve ces simulateurs hybrides à partir de
1985 [4]. Les premiers simulateurs hybrides étaient réalisés pour des modèles présentant une dynamique lente permettant un pas de calcul relativement long [5] [6]. On doit noter que le pas de calcul utilisé en simulation temps réel est fixe, cela permet d'avoir un temps de résolution connu et garantir le respect du temps réel.
Les simulateurs temps réel complètement numériques ont été développés progressivement avec les avancées dans la microélectronique [7] [8]. La première conférence traitant de ce sujet s'est tenue en 1995 [9]. Dans ces mêmes années, plusieurs groupes ont débuté leurs travaux sur les simulateurs temps réel complètement numériques. Hydro-Québec a mis en fonction Hypersim en 1996, RTDS technologies a commencé le développement du simulateur RTDS en 1994 [10], on peut également mentionner OPAL-RT qui a débuté ses opérations en 1998.
Dans les simulateurs temps réel entièrement numérique d'aujourd'hui, le pas de calcul minimal atteignable, pour l'ensemble de la simulation, est aux alentours de 10 ps [11]. Le pas de calcul minimal est directement lié à la complexité du réseau simulé. En pratique, on peut s'attendre à obtenir une valeur plus réaliste de 20 ps. Cela est adéquat pour simuler le comportement de la majorité des éléments du réseau. En fait, un pas de calcul de 50 ps est typiquement suffisant. Cependant, si Ton souhaite inclure le modèle détaillé d'un équipement présentant une dynamique trop rapide pour le pas de calcul utilisé, il faut utiliser son modèle moyen [12] [5].
Cette problématique est rencontrée pour différents équipements dont le D-STATCOM « Distribution Static Synchronous Compensator ». La commande par modulation de largeur d'impulsion (MLI) de son convertisseur est réalisée à une fréquence de Tordre du kHz ce qui impose l'utilisation d'un pas de calcul de Tordre de la microseconde pour représenter adéquatement le modèle détaillé. L'application de la méthode de simulation à double pas de calcul peut donc être envisagée pour simuler ce type d'équipement.
1.2. Problématique et contexte
La problématique considérée dans ce mémoire est liée à la limitation de pas de calcul minimal imposée par la puissance de calcul du simulateur et au besoin de simuler le comportement détaillé d'un convertisseur électronique de puissance. Pour résoudre ce problème, il est possible d'utiliser une simulation à pas multiples ou plus spécifiquement à double pas de calcul [13]. Cette approche consiste à séparer le réseau en une partie rapide et une partie lente, les deux étant reliées par un point de découplage qui gère l'échange d'information. La partie lente est simulée sur le simulateur standard et la partie rapide est simulée par une unité de calcul plus performante. Cette approche a été explorée et semble adéquate pour représenter la dynamique du modèle électronique de puissance dans la partie rapide de la simulation [14] [15].
L'application du double pas de calcul ajoute un point de découplage qui sépare les régions avec des pas de calcul différents. Ce point de découplage est non caractéristique, c'est-à-dire qu'il provoque des comportements absents d'une simulation de référence utilisant un seul pas de calcul, soit le pas de calcul de la partie rapide. La stabilité numérique et la précision des résultats en sont affectées [16]. Quelques approches d'atténuation des comportements non caractéristiques ont été étudiées dans la littérature [17].
L'explication de la provenance du comportement non caractéristique demeure généralement peu ou pas documentée. Lors de l'implantation de la méthode, il est important de connaître les phénomènes non caractéristiques auxquels on peut s'attendre ainsi que les méthodes d'atténuations possibles.
Les travaux de recherche sont réalisés dans le contexte d'une implantation éventuelle de la méthode sur Hypersim. La méthode pourrait être implantée avec la technologie FPGA « Field Programmable Gate Array ». Cette technologie aurait accès aux signaux de commande provenant d'un contrôleur réel et exécuterait la simulation rapide qui requiert ces signaux. Elle s'est avérée adaptée pour implanter des équations de réseaux [15].
1.3. Description du projet de recherche
Ce mémoire présente une étude des problèmes liés à l'implantation du double pas de calcul sur une simulation de réseaux électriques en temps réel. Les solutions possibles sont aussi étudiées. Cela est réalisé dans le contexte de l'implantation éventuelle de la méthode sur Hypersim. Pour les besoins du projet, le superordinateur nécessaire à l'exécution temps réel d'Hypersim n'a pas été utilisé. Aussi, l'implantation sur FPGA a été abstraite à l'étude. L'étude des effets de l'implantation du double pas de calcul a été réalisée dans Matlab à l'aide de SPS « SimPowerSystems ». Pour se rapprocher de l'objectif final, les conditions présentes lors d'une simulation temps réel, avec un vrai contrôleur, ont été reproduites en temps différé dans Hypersim. Il faut noter que la méthode utilisée par Hypersim en temps différé est la même que celle utilisée en temps réel. Un artifice est utilisé pour simuler la présence d'une unité de calcul rapide dans la simulation d'Hypersim. Les contraintes particulières d'implantation FPGA sont abstraites des simulations réalisées, mais celles-ci sont passées en revue.
Description des apports
Il est connu que le double pas de calcul provoque des problèmes, mais ceux-ci demeurent peu explorés et peu détaillés [16] [17]. Le projet explore ces phénomènes pour un cas typique pouvant bénéficier d'une simulation à double pas de calcul, un D-STATCOM. L'implantation du double pas de calcul peut aussi provoquer de l'instabilité numérique et faire diverger la simulation. Ce phénomène est peu compris, mais connu des gens versés dans l'art. Pour le présent travail, la stabilité numérique est assurée par un artifice connu : l'ajout d'une résistance parasite pour amortir les oscillations. Les observations sont présentées afin de mieux comprendre le phénomène.
Pour quantifier le comportement non caractéristique, en plus de la comparaison des formes d'onde, un second paramètre de surveillance est considéré : la puissance échangée au point de découplage.
Organisation du mémoire
Le chapitre 2 présente les notions sous-jacentes à la simulation de réseaux en temps réel. Les outils de simulation utilisés dans le travail de recherche y sont présentés pour illustrer les différentes méthodes utilisées et les astuces liées au temps réel.
Le chapitre 3 présente la méthode de découplage utilisée et la théorie du double pas de calcul. Un exemple simple de circuit électronique de puissance est présenté.
Le chapitre 4 présente la méthodologie proposée pour étudier les comportements non caractéristiques et l'instabilité numérique dans la simulation à double pas de calcul d'un réseau électrique. Dans ce chapitre, on étudie l'effet du double pas de calcul sur un réseau qui ne comporte pas de commutation. On se concentre sur les effets de perturbation de lecture de puissance et sur la stabilité numérique.
Dans le chapitre 5, on étudie l'effet du double pas de calcul sur la simulation d'un D-STATCOM. On observe les effets sur les mesures de puissance et sur l'instabilité numérique. On observe aussi les effets sur le contenu harmonique des formes d'onde.
Le chapitre 6 présente une implantation de la méthode du double pas de calcul dans l'environnement d'Hypersim. Les résultats obtenus avec SPS et Hypersim sont présentés.
réseaux
Ce chapitre introduit les notions importantes de la simulation numérique de réseaux électriques. Elles sont présentées pour le cas général et pour le cas de la simulation temps réel qui impose des contraintes particulières. Pour illustrer les différences entre un outil destiné aux simulations en temps différé et un outil destiné aux simulations en temps réel, SimPowerSystem et Hypersim sont comparés.
Le chapitre présente premièrement les principaux composants des réseaux électriques. Ensuite on présente la génération des équations de réseaux avec la méthode nodale et avec la méthode des variables d'état. Un exemple de réseau composé uniquement d'éléments linéaires est utilisé pour illustrer ces méthodes.
Les méthodes d'intégration numérique typiquement employées dans la simulation sont présentées puis on présente la discrétisation des équations de réseaux avec ces méthodes. Les notions de stabilité et de précision de la simulation numérique sont illustrées dans un exemple simple.
2.1. Composants de réseaux
Il existe trois grands types de composants permettant la construction des équations de réseaux : les modèles de composants linéaires (RLC), les modèles basés sur la propagation des ondes (lignes de transport) et les modèles non linéaires (interrupteurs, éléments saturables, parafoudre). Il y a aussi les autres modèles (mécaniques, chimiques, thermiques, etc.).
Les composants linéaires sont décrits par des équations linéaires provenant de la simplification des lois de T électromagnétisme. Ainsi, on retrouve les équations suivantes pour la description du comportement des trois composants R, L et C. On note que pour L et C, ce sont des équations différentielles.
Résistance [Ohm] V = Ri I I - 1
t
Inductance [Henry] i — — I v(t)dt II- 2 1 f1
Condensateur [Farad] v = — I i(t)dt II- 3
•■K
Les composants basés sur la propagation des ondes permettent de prendre en compte l'effet de retard en fonction de la longue distance parcourue par une onde. C'est le phénomène que Ton rencontre dans les lignes de transport. Pour se donner un ordre d'idée, un signal électrique sur une ligne aérienne voyage approximativement à la vitesse de la lumière. Ainsi, une ligne de 15 km provoque un délai temporel de 50 ps.
Les composants non linéaires permettent de représenter le comportement plus réaliste de certains composants ainsi que les interrupteurs. Par exemple, la saturation des matériaux magnétiques dans un transformateur ou les convertisseurs basés sur la commutation d'interrupteurs. Ces composants requièrent un traitement numérique particulier qui est présenté en fin de chapitre.
2.2. Equations de réseaux électriques
Les équations de réseaux sont des équations différentielles qui définissent les liens entre les différents composants du réseau et les sources qui s'y trouvent. Il existe différentes méthodes pour construire les équations de réseau, dont la méthode nodale et la méthode des variables d'état qui seront présentées.
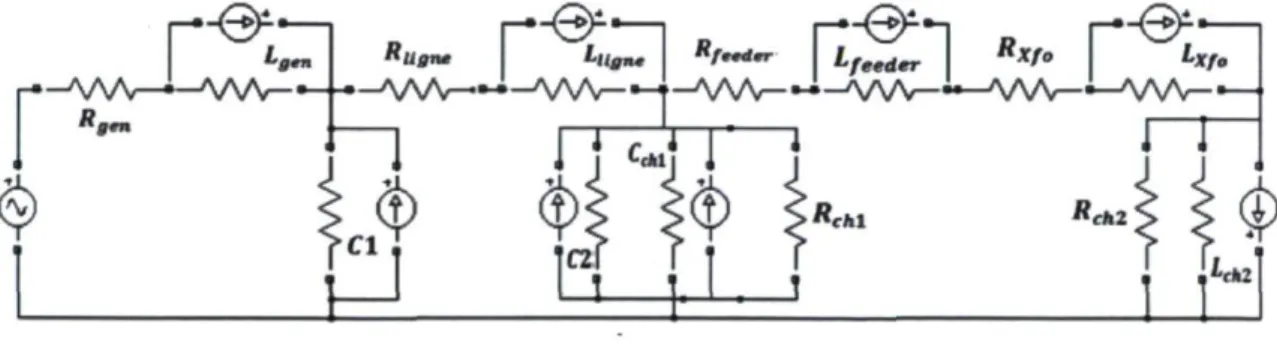
Pour exprimer les relations entre les éléments, il faut utiliser la loi des mailles et la loi des nœuds [18]. La Figure 1 présente l'équivalent monophasé d'un réseau électrique. Le réseau comporte un générateur, un modèle de ligne, un transformateur et des charges. Les tensions nodales, le nœud de référence et le sens des courants dans les éléments sont visibles.
vm ***" vb * * " v *"*"• v t"*"* v R' - * *r v h — t c y Rxr<> v L*r» v
_ _ ^ _ I B Ï Î - _ -—WHÏT--
. ^ ^
nr -
f c^ . ^ p
W ïv .
Impédance de sortie i X R L ''Qn e en Pi i 4 1X Feeder Impédance équivalente
du générateur transformateur © C/2 ligne - L c % a -»- C/2 ligne ^ f - c h a r g e l Charge2
T tt * 2
noeud de référence
Figure 1 : Circuit équivalent monophasé du réseau à étudier
À l'aide de la loi des mailles, on peut faire ressortir les équations de chaque maille. Par exemple, pour la maille de gauche, on obtient :
t
Valim = Rgenigen + Lg e n , + — I ic ld t I I - 4
0
Pour chaque nœud, on doit écrire une équation de courants. Par exemple, pour le nœud Vc,
on obtient :
i r( dvc (y.
Vc: - (Vb-Vc)dt = C1- ^ + ^
L J0 dt R
1 ligne
On doit répéter l'opération pour chaque maille et chaque nœud de façon à définir le système d'équations du réseau.
2.3. Génération des équations de réseaux électriques
Les simulateurs modernes construisent automatiquement les équations de réseaux par différentes approches qui se retrouvent dans les deux outils utilisés dans le projet. SimPowerSystems utilise la représentation par variables d'état en temps différé et Hypersim utilise une méthode nodale optimisée pour le temps réel, soit la méthode EMTP. La méthode nodale et la méthode des variables d'état sont d'abord présentées sans discrétisation. La considération des éléments non linéaires est présentée dans la dernière section sur les méthodes générales.
Méthode nodale
La méthode nodale est basée sur l'application des lois des tensions et des courants de Kirchoff. Pour présenter la méthode, le circuit de la Figure 1 est utilisé comme exemple. Voici les étapes de l'algorithme :
1. Définir un nœud de référence et définir les tensions des nœuds par rapport à ce noeud.
2. Exprimer les tensions de branche en fonction des tensions nodales.
3. Exprimer les équations de courant pour tous les nœuds sauf pour le nœud de référence.
4. Insérer les relations de tension dans les équations de courant.
5. Manipuler les équations pour obtenir un système de la forme Y v - i . Y est la matrice d'admittance nodale, v le vecteur de tension nodale et i le vecteur d'injection de courant.
6. Inverser la matrice d'admittance.
7. On peut ensuite résoudre le système matriciel obtenu avec un procédé d'intégration numérique.
Les étapes 1 à 3 de l'algorithme de résolution sont relativement simples, elles ne sont pas détaillées pour alléger le texte. Une fois rendu à l'étape 4, on obtient un système à 8 équations et 8 inconnues, soit le nombre de nœuds où la tension doit être déterminée. Les équations ici-bas, exprimées avec la transformée de Laplace, dans le domaine des s, décrivent la loi des courants à chaque nœud en fonction des tensions nodales.
Vb: Vc: Vd: Ve: Vf: Vg: Vh: Vi: (Va Vb) (Vb Vc) xg e n (vb vc) sL l\ npfl 5 J U = vecl S + ■gen (Vc ~ Va) g e n " l i g n e (vc vd) (Vd Ve) R ligne sL ligne (Vg ~ Ve) ve (ye Vf) VeC2s+^+VeCchls+> Rchl (.VeVf)_(VfVg) R f e e d e r R f e e d e r sL f e e d e r ( V f V g ) _ ( V9 Vh) sL f e e d e r * X f o {Vg Vh) (Vh Vt) R X f o sL X f o (vh vo v, sL* Rr + Vt sLr II6 II7 II8 U9 1110 H l l U12 1113 "Xfo nc h 2 zL'chl
Il est ensuite possible de construire le système matriciel, sous la forme Yv = i. H faut noter que les nœuds où la tension est imposée par une source, leur contribution est considérée dans le vecteur d'injection de courant et non dans le vecteur de tension nodale. S'il y avait une source de courant, elle serait considérée dans le vecteur d'injection de courant.
* + I t. 1 •L 0 0 0 1 1 + C\s + **. **. ^ 0 0 0 0 *<*. V + ) iv rf. 0 0 0 0 1 " » . r C , S + — + C MS 4 1 R! m m .
«zf^
0 0 0 0 1 « J . 1 1 Rfmm. S^Jm,mW Aî^s 0 0 0 1 « J . 1 1 Rfmm. S^Jm,mW s L ^ , 0 0 0 0 1 s L j n , R} 0 0 0 0 0 1 0 0 0 0 0 0 «« s l „ 1 1 *A» *L» ** o 0 0 0 0 0 0ï ï
V IY = Matrice d'admittance typiquement creuse
II-14
Les matrices obtenues sont typiquement creuses, c'estàdire que la matrice contient principalement des valeurs non nulles sur la diagonale principale (II 14).
Méthode des variables d'état
Un réseau électrique peut être représenté par le système d'équations suivant :
Équation d'état : x = Ax + Bu II 15 Équation de sortie : y = Cx + Du II 16 où « x » est le vecteur des variables d'état, « x » représente la dérivée en fonction du temps de ces variables d'état, « u » est le vecteur d'entrée qui définit des sources, « y » est le vecteur des variables de sortie et A, B, C, D sont les matrices d'état. Dans un réseau électrique, les variables d'état sont les courants dans les inductances et les tensions aux bornes des condensateurs.
Dans l'exemple du réseau électrique simplifié, huit équations définissent les huit variables d'états observées. On formule les équations d'état continu en faisant ressortir les boucles de tension pour les inductances et les courants aux nœuds des condensateurs.
Par exemple, pour l'inductance Lgen et le condensateur C1 on obtient :
VAlim = VR g e n + VL g e n + VCl I I 17
k g e n = ÏRLigne + lCl H 18
On peut ensuite exprimer les équations sous leur forme différentielle :
\vAlim Rg e n " hg e n) ~ VC 'C, dt Lgen Lgen d tgen ''Ligne
c.
1119 1120 Exprimées sous cette forme, les équations sont plus faciles à mettre sous forme matricielle. À noter qu'il faut reformuler vR en et iR u n e (en gras) pour que leur forme soit compatibleavec la formulation voulue.
On peut construire le système matriciel x = Ax + Bu qui se présente sous la forme :
d di variable d'état 1 variable d'état n. CSLJ ^ ... CStn j c st n , l ■•• c s^ n , n variable d'état 1 variable d'état n. 1121 + fCStn ... cstn C S tn l ... C S tn nj source 1 s o u r c e n
Pour la formulation de l'équation de sortie y = Cx + Du, on définit ce que Ton souhaite observer, comme courant ou comme tension. Par exemple, si on souhaite uniquement surveiller une variable d'état, la tension du condensateur C2, on obtient l'équation de sortie suivante : rc_ [ 0 0 0 1 0 0 0 0] gen vc ''Ligne VC2 VCc h l ^feeder ^ X f o l lc h 2 + [0][Valim] 11-22
La méthode des variables d'état est la méthode utilisée par SimPowerSystem pour générer les équations de réseaux.
2.4. Méthodes d'intégration numérique
Pour résoudre les équations de réseau de façon numérique, on doit discrétiser les équations et les intégrer avec un procédé d'intégration numérique. On peut classer les méthodes d'intégration en deux catégories, les méthodes à pas variable et les méthodes à pas fixe. Les méthodes à pas variable permettent d'ajuster le pas de calcul pendant la simulation de façon à ajuster Terreur locale à un niveau acceptable prédéterminé, mais le temps de résolution n'est pas déterministe. Ainsi, le pas variable n'est pas approprié à la simulation temps réel. Pour les simulations en temps réel, la charge de calcul doit être minimale de façon à obtenir un temps de résolution inférieur au pas de calcul. Il faut cependant un compromis entre le temps de résolution, la précision et la stabilité numérique. Le procédé d'intégration doit donc offrir le maximum de stabilité et de précision tout en ne requérant que peu d'opérations mathématiques.
Les méthodes d'intégration les plus simples sont les méthodes d'Euler avant, arrière et la méthode trapézoïdale. Leur objectif est d'approximer le point futur à l'aide de la connaissance de l'état actuel et d'une approximation de la pente qui donne le point futur. L'algorithme de chacune de ces méthodes est présenté ici-bas :
Euler avant : xn + 1 = xn + h • x'n II- 23
Euler arrière : xn + 1 = xn + h • x'n + 1 II- 24
(
x' -\- x' \
—— n + 1J 11-25
La prochaine valeur (xn + 1) est approximée à l'aide de la valeur présente et de l'addition de
la multiplication du pas de temps (/i) avec la pente de la fonction au point présent (x^), futur(jt^+1) ou la moyenne des deux I ——^^J respectivement pour les méthodes d'Euler
avant, arrière et la méthode trapézoïdale. Dans le cas où il faut prendre la valeur de la pente au point futur, ce point est approximé à l'aide de la méthode Euler avant.
La complexité numérique de la méthode trapézoïdale est plus grande que celle des deux autres méthodes, mais elle est reconnue pour être plus juste et plus stable. La méthode arrière est moins lourde que la méthode trapézoïdale, mais elle est moins juste, elle a
cependant la propriété d'être stable, et ce, même avec des grands pas de calcul. La méthode avant est simple à implanter et légère, mais sa stabilité est très dépendante du pas de calcul.
Discrétisation des composants linéaires :
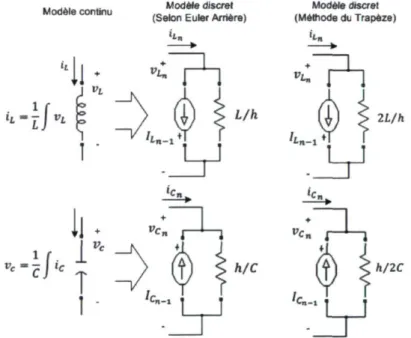
On peut appliquer ces trois méthodes d'intégration aux composants des réseaux électriques. Dans le cas de la résistance, comme il n'y a pas d'effet de mémoire, la relation est directe entre le courant, la tension et la résistance. Dans le cas de l'inductance, le flux présent est en fonction de l'historique de la tension à ses bornes et dans le cas du condensateur, le champ électrique est fonction de l'historique du courant le traversant.
On peut représenter le comportement historique de l'inductance et du condensateur par une source de courant historique en parallèle avec une résistance équivalente. La Figure 2 présente le modèle équivalent discret de l'inductance et du condensateur selon Euler arrière et la méthode trapézoïdale. Le « h » correspond au pas de calcul utilisé pour discrétiser. Il est possible d'utiliser des variantes comme d'utiliser une source de tension historique en série avec une résistance, mais le résultat revient au même [2] [3].
Modèle continu (Selon Euler Arrière) Modèle discret (Méthode du Trapèze) Modèle discret
VLm f^-J
' l » - l *
2L/h
L_J
h/ZC
Figure 2 : Modèles équivalents de L et C selon Euler arrière et la méthode du trapèze
Les démonstrations des modèles discrets équivalents par la méthode Euler avant, Euler arrière et la méthode trapézoïdale sont présentées à la page suivante.
Résistance : V = Ri
Euler avant, arrière et méthode du trapèze : vR n = RiR n
Inductance : i: = / v ( t ) d t
Euler avant Euler arrière Trapézoïdale
xn +i — xn + h • xn VL Ln + 1 , n F lL» ~ L/h + l t 1 V, h n L/h + l L n1 Xn +l = X n + h Xn + 1 X n + i = X n + h. Çr. + X n ^ L lL n + l lL n + h \ 2L ) iLn = 2 Ï (vL n l + VL n) + kn.1 lL n = VL n ,
T J h ^
+ /,.
V, i = n 4 I L n L/h L n"1 Vin l L n 2L/h l L» i Condensateur : v = /0 i(t)dtEuler avant Euler arrière Trapézoïdale
xn + i — xn + "■• x'n x „t l= xn + h x L ,+ 1 xn t l= x „ + h (X" *"+')
* « • * . + «■£ "c
ntl=V
Cn +k ^
VCnti=VCn + h. ( ^ l ^
<V_ = ucn vCn_1 n h/C h/C vc ir = —— + Ir cn h / rh/C Cn \ vCn+1 vCn 2C/h 2C/h C n h / l C h/2C c1 V f ir = — + Ir C n h / 2 C Cn"1Méthode EMTP
La méthode EMTP est un cas particulier de la méthode nodale [3]. La méthode utilise la représentation des composants directement discrétisée par la méthode du trapèze pour générer les équations de réseaux. La Figure 3 montre le modèle EMTP de l'inductance et du condensateur.
Model* continu (Méthode du Trapèze)
km
"Il ; -^"Pn
W B A à\ i
2L/H Modèle continu •V-i/'cil-1*
T
I ■ (Méthode du Trapèze)(t) |
hnCFigure 3 : Modèle EMTP de l'inductance et du condensateur
La résistance du modèle de l'inductance vaut 2L/h et la source de courant en parallèle vaut ILn_1 = hn! + (vj,ni/(2£/J0). Pour le condensateur, sa résistance équivalente vaut
h/2C et la source de courant en parallèle vaut lC n i = i(^_ + {yCn J(h/2C)). La Figure 4
montre le réseau équivalent obtenu par la méthode EMTP pour le réseau de la Figure 1.
• A W - M / W »
Figure 4 : Circuit équivalent avec la méthode EMTP (dicrétisation trapézoïdale)
L'avantage de la méthode est l'obtention d'une matrice d'admittance directement discrétisée à l'étape de la construction de celleci.
Discrétisation des équations d'état
On peut discrétiser les équations d'état en appliquant une des méthodes d'intégration numérique.
Équation d'état continu: Équation de sortie continu:
x = Ax + Bu y = Cx + Du Euler avant x ( k + l ) = x(k) + hx'(k) x ( k + l ) = x(k) + h[Ax(k) + Bu(k)] 11-26 II-27 11-28
Où I est la matrice unité.
11-29
Euler arrière x(k+1) = x(k) + hx'(k+1) Commençons par traiter l'équation d'état :
x ( k + l ) = x(k) + h [ A x ( k + l ) + B u ( k + l ) ] x ( k + l ) - h A x ( k + l ) - h B u ( k + l ) = x(k)
[ I - h A ] x ( k + l ) - h B u ( k + l ) = x(k) On effectue le changement de variable :
w . [ I - h A ] x - h B u h 11-30 11-31 11-32 11-33 11-34 On en déduit x = [ I - h A ] 'h[w + Bu] L'équation d'état (II- 33) devient alors:
h w ( k + l ) = x(k) = [ I - h A ] 'h[w(k) + Bu(k)] II-36 w ( k + l ) = [ I - h A ] 'w(k) + [I < v ' ^ -- h A ] l Bulk) II-II- 17 w ( k + l ) = [ I - h A ] 'w(k) + [I < v ' ^ -Bd Bulk) II-Pour l'équation de sortie, on effectue le même changement de variable :
II-y(k) = Cx(k) + Du(k) II- 38
y(k) = C [ [ I - h A ] 'h[w(k) + Bu(k)]] + Du(k)
II-39 y(k) = < : [ I - h A ] [i iw(k) + [D + C[I-hA]- 1h B ] u ( k)
II-II- 40 y(k) = <
c
d iw(k) + Dd k) II-II- 40 Traoèze x ( k + l ) = x(k)+ ^[x'(k) + x'(k+1)] II -41 x ( k + l ) = x(k) + ^[Ax(k) + Bu(k) + A x ( k + l ) + B u ( k + l ) ] II -42 x(k + 1 ) - ^Ax(k + 1 ) - |fiu(k + 1 ) = x(k) + ^Ax(k) + ^Bu(k) II -43MA'
2 _
x(k+ l ) - ^ B u ( k + l ) = "î + ; A~ 2
x(k) + ^Bu(k) II -44 On effectue le changement de variable :
['-H
x - - B u2 II- 45
On en déduit :
I -2- A W + B H
2 II-46
L'équation d'état (II- 44) devient
h w ( k + l ) I + | A 2 - i w(k) + | u ( k )
+
pu(k)
w(k+ 1) = 2[.|A]
" w ( k ) + iïl + ^A[■H
i + ifu(k)
Ad Bd y(k) = Cx(k) + Du(k)y(k) = c[[
n 1 l ~ 2 A w(k) + | u ( k ) + Du(k) y(k) C [ I | A " l h w ( k ) + D + CM
A
]
>]
u(k) Cd Dd II48 II49 1150 1151 II52SPS discrétise directement les matrices d'état à l'aide de la méthode trapézoïdale. Il est également possible d'utiliser les matrices d'état non discrétisées avec un intégrateur spécifique tel que le présente le schéma Simulink de la Figure 5.
150 Constant Disorete-Time Integrator (Trape) B * u - * ? + ) - + K T s { z + 1 ) afej] A * u C * u * > D - u Discrete-Time Disarete-Time Integrator {Euler Avant) Integrator {Euler Arrière)
K T s z-1 K T s z z-1
I N -
»l I
£>'»IZ>|
l > ScopeExemple de l'effet du choix Au procédé d'intégration numérique
Un exemple de circuit, uniquement composé de composants linéaires, est présenté à la Figure 6. Ce circuit est utilisé pour illustrer les notions de précision/stabilité discutées précédemment. Les résultats des trois procédés d'intégration, en utilisant un pas fixe, sont présentés. Dans le circuit, il y a deux variables d'état soit le courant dans l'inductance et la tension aux bornes du condensateur.
L'exemple a été réalisé à l'aide de SimPowerSystems. C'est la forme sous laquelle les équations de SimPowerSystems sont converties pour que Simulink puisse résoudre les équations. Les trois procédés d'intégration ont été appliqués sur ces équations d'état.
Discrete, Ts - 5e-006 s. powergui -•-j n5T!T'-»-lOOmH 150V ' . nl m f 5 Current Measurement 10 Ohm 200uF Voltage M :asurement Scope
Figure 6 : Circuit simple pour démontrer l'effet du pas de calcul et du procédé d'intégration
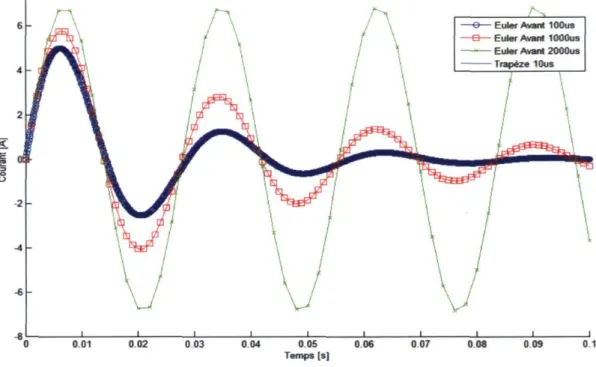
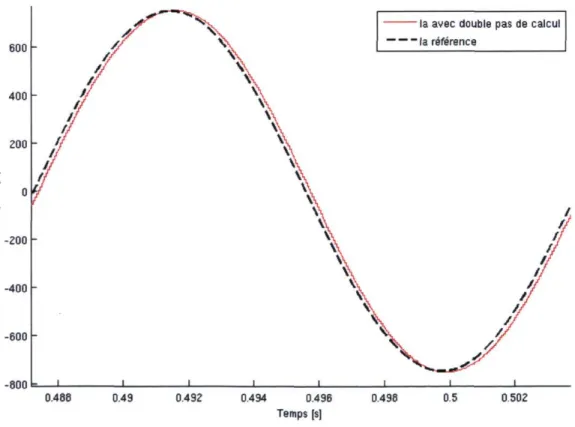
On présente premièrement les résultats pour différents procédés d'intégration avec un pas de calcul de 100 ps. Le courant est observé dans le circuit en fonction du temps. Sur la Figure 7, il y a quatre courbes, soit le courant calculé avec chaque méthode avec un pas de 100 ps ainsi que le courant calculé avec la méthode du trapèze avec un pas de 10 ps ce qui correspond à la courbe considérée comme la référence. Il est difficile de voir les différences entre les courbes, la Figure 8 présente donc un gros plan sur la première crête du courant.
Figure 7 : Formes du courant avec différents procédés d'intégration, pas de 100 JUS
e» © - ■ E u l e r A v a n t
5 8 6 Temps [s]
Figure 8 : Effet du procédé d'intégration, première bosse de courant, pas de 100 us
Il est possible d'observer que la méthode du trapèze donne le résultat le plus près de la simulation de référence, mais que Terreur des autres méthodes demeure acceptable. On présente ensuite l'effet d'une augmentation du pas de calcul sur les résultats pour les différents procédés d'intégration.
L'effet du pas de calcul avec la méthode Euler avant, Euler arrière puis la méthode trapézoïdale est présenté respectivement à la Figure 9, la Figure 10 et la Figure 11.
■9— Euler Avant 10Ous
e — Euter Avant 10OOus Euler Avant 2000us Trapèze 10us
Figure 9 : Effet du pas de calcul sur l'intégration par Euler avant
- e —A m ë r e 100us
- B — Arrière 1000us
— " —A r r i è r e 2O00us Trapèze 10us
O Trapèze 100us
Q—Trapèze lOOOus Trapèze 2000us Trapèze 10us
x 10"
Figure 11 : Effet du pas de calcul sur l'intégration trapézoïdale
Avec Euler avant (Figure 9), on peut rapidement obtenir des oscillations numériques si le pas de calcul est trop grand. C'est le phénomène que Ton peut observer avec le pas de 2000 ps. Si on augmente davantage le pas de calcul, les signaux finissent par diverger vers des valeurs infinies.
Euler arrière (Figure 10) est plus stable, mais moins précise que la méthode du trapèze. À la Figure 11, un gros plan est effectué sur la première bosse de courant obtenue avec l'intégration trapézoïdale. Les résultats demeurent près de la simulation de référence même avec un grand pas de calcul.
2.5. Méthodes générales de simulation numérique
Cette section présente les méthodes générales de simulation numérique capables de considérer tous les types de composants. Jusqu'à présent, seules les considérations avec des composants linéaires ont été présentées. L'accent est mis sur les composants non linéaires, puisque ce sont eux qui sont visés par la méthode du double pas de calcul.
En réalité, tous les composants ne sont linéaires que dans une certaine plage de fonctionnement ou sont fondamentalement non linéaires. Par exemple, les composants RLC peuvent typiquement être considérés linéaires alors que les composants à commutation naturelle ou forcée sont fondamentalement non linéaires. Les non-linéarités viennent modifier les valeurs des composants utilisées dans les matrices ou viennent enlever ou ajouter des éléments.
Un exemple typique de non-linéarité qui modifie la valeur des composants est la saturation d'un transformateur. Cette non-linéarité modifie la valeur de l'inductance équivalente, ce qui vient modifier les valeurs contenues dans les matrices. Dans la catégorie des composants qui viennent modifier les dimensions des matrices, on peut nommer les interrupteurs. Leur commutation vient modifier la topologie du circuit ce qui provoque une modification de la taille des matrices.
La modification de la valeur numérique impose le calcul de la nouvelle matrice d'admittance nodale ainsi que de son inverse ou des nouvelles matrices ABCD discrétisées pour la méthode par variable d'état. Ce sont les opérations les plus coûteuses en termes de temps de calcul.
En pratique, il est possible de tirer un gain de la discrétisation en utilisant quelques astuces. L'étude de la méthode générale d'EMTP permet de mettre en évidence ces astuces. La méthode est présentée pour Hypersim.
Méthode générale EMTP (Hypersim)
Composants linéaires (RLC): Ils sont discrétisés selon l'approche EMTP, par la discrétisation trapézoïdale.
Lignes de transport : Pour faciliter les calculs de ligne, la transformation de Fortescue est appliquée sur les paramètres de la ligne. Elle permet de transformer un système déséquilibré triphasé sous forme de trois systèmes équilibrés. Le phénomène de propagation de Tonde est mis à profit pour utiliser les lignes comme point de découplage afin de distribuer les calculs sur plusieurs processeurs.
Ce phénomène peut être utilisé à partir du moment que la ligne est suffisamment longue pour mettre un délai temporel supérieur ou égal au pas de calcul utilisé. Tel que mentionné précédemment, avec une ligne de 15km, il y a approximativement un retard de 50 ps entre les signaux à l'entrée et à la sortie de la ligne.
Éléments non linéaires (ne modifiant pas la topologie): Les éléments non linéaires qui ne modifient pas la topologie (RLC) sont traités comme une résistance équivalente ( Req ) en
parallèle avec une source de courant historique ( ifttet) ), sauf pour la résistance variable qui
n'a pas de source en parallèle. La non-linéarité est représentée par une courbe caractéristique approximée par des segments linéaires à résistance constante (ou à pente constante sur un graphique v — i).
En théorie, il faudrait évaluer la nouvelle valeur de Req pour les conditions du pas actuel,
mais on peut uniquement utiliser les résultats du dernier pas de calcul puisque les résultats actuels ne sont pas disponibles. Par conséquent, le changement d'un segment linéaire à un autre est retardé d'un pas de calcul, il est donc judicieux d'éviter des changements de pente rapide. On va ainsi mettre plus de points où la pente réelle varie rapidement.
Éléments non linéaires (modifiant la topologie): Les éléments non linéaires qui modifient la topologie (à commutation forcée ou naturelle) sont également traités comme une résistance variable où la résistance est très faible pour l'état de conduction et élevée pour l'état bloqué. En simulation de réseaux, on ne s'intéresse pas à la caractéristique transitoire d'ouverture ou de fermeture du composant. C'est pour cette raison qu'un modèle
pratiquement idéal peut être utilisé. On peut observer qu'en utilisant cette méthode, la topologie n'est pas changée; d'un point de vue de la construction des équations du réseau. Les dimensions des matrices restent inchangées.
Pour connaître quelle valeur de résistance utiliser, le simulateur doit connaître l'état de ces éléments avant de construire la matrice d'admittance. Cela implique qu'un événement se produisant entre deux pas de calcul ne sera considéré qu'au prochain pas. Cette contrainte est surtout problématique avec les diodes. L'extinction du courant peut se produire entre deux pas, cela engendre un courant négatif dans Télément et de l'oscillation numérique. Il a été proposé d'utiliser le CDA (Critical Damping Ajustaient) [19], pour compenser l'occurrence d'un tel événement.
Approches numériques de résolution : Il existe différentes astuces pour accélérer les calculs. Ces astuces peuvent varier d'un simulateur à l'autre, mais les points d'optimisation demeurent similaires dans tous les cas. Par exemple, la matrice d'admittance est typiquement creuse et symétrique, retenir la position des zéros permet donc d'éviter des calculs et la matrice symétrique permet d'utiliser une conversion de matrice plus efficace (LDU vs LU). On peut aussi noter qu'il est possible de réduire la charge de calcul en positionnant les éléments non linéaires dans la section inférieure droite de la matrice d'admittance. Une modification de valeur demande ainsi seulement de recalculer la partie inférieure droite de la matrice.
Séquence d'opération
Les simulateurs temps réel fonctionnent en deux étapes : ils commencent par la phase de préparation de simulation où les calculs préparatoires sont réalisés. La simulation temps réel peut ensuite débuter.
Étapes de préparation :
1. Lire les paramètres des éléments du schéma graphique. 2. Définir les signaux des nœuds (tension et courant).
3. Définir les signaux associés aux éléments : les tensions (exceptées les tensions de nœuds), les courants (sources et sources historiques) ainsi que les signaux de contrôle.
4. Calculer la partie fixe de Tadmittance et de la matrice d'admittance Yinitial de tous
les éléments ainsi que les autres paramètres requis durant la simulation.
5. Initialiser Y à Yinitial et repositionner Y pour que les éléments variables n'affectent
que la partie inférieure droite de Y. Étapes de simulation (temps réel ou différé):
À chaque pas de calcul, les opérations suivantes sont réalisées :
1. Déterminer l'état des composants commutés et la commande appliquée.
2. Si un composant commuté doit changer d'état ou un élément non linéaire change de plage linéaire d'opération (point 6 du dernier pas de calcul) :
a. Déterminer la partie de Y qui doit être recalculée due à un ou des éléments qui changent de valeur.
b. Effectuer la décomposition matricielle de la section inférieure droite.
3. Calculer les courants imposés par les sources. (Source de courant et source de tension par son modèle équivalent.)
4. Additionner les sources de courant au vecteur d'injection de courant (/). 5. Résoudre YV = / pour calculer V, les tensions nodales.
6. Si un élément non linéaire change de point d'opération (nouvelle tension) :
a. Calculer la nouvelle conductance équivalente pour cet élément, l'effet de la modification va être pris en compte au prochain pas de calcul.
7. Calculer le courant historique Inist (pour le prochain pas).
8. Réinitialiser le vecteur d'injection (/) à zéro pour le prochain pas de calcul. 9. Additionner Ih i s t au vecteur d'injection de courant (/).
Méthode générale par variables d'état (SimPowerSystems)
Lors de l'initialisation d'une simulation, un mécanisme construit le modèle d'état du circuit électrique et construit le système équivalent qui peut être simulé par Simulink. Cela est réalisé en plusieurs étapes par SimPowerSystems:
1. Obtenir les paramètres des blocs et évaluer la topologie du circuit. Les blocs sont divisés en blocs linéaires et non linéaires.
2. Le modèle d'état (A, B, C, D) est calculé pour la partie linéaire du circuit. Cela inclut les calculs de régime permanent, d'initialisation et de représentation discrète des matrices. C'est la méthode de Tustin, équivalent à la méthode du trapèze, qui est utilisée pour discrétiser les matrices.
3. SimPowerSystems donne alors un modèle interprétable par Simulink. Simulink gère ensuite la simulation.
SimPowerSystems construit un système d'équations différent en fonction des choix de simulation et de la présence d'éléments non linéaires. Cette gestion est faite dans une « S-function » qui est un fichier externe interprétable par Simulink. Ce fichier varie en fonction des besoins de la simulation : Simulation discrète ou continue, présence ou non d'éléments non linéaires. Le seul cas où SPS donne directement les matrices A, B, C, D à Simulink est pour le cas trivial de la présence d'éléments uniquement linéaires et l'utilisation d'un algorithme continu. Pour tous les autres cas, SPS gère la logique de calcul afin de tenir en compte les éléments non linéaires. De façon schématisée, on retrouve le fonctionnement à la Figure 12. Modèles linéaires y Sources u Matrices d'état y Sources Matrices d'état y
Sorties telles que
État composants commutés Matrices d'état y État composants commutés Matrices d'état
v État composants commutés w Matrices d'état
v blocs de mesure i Matrices d'état v i v i Modèles non linéaires v
Dans le modèle d'état linéaire, on retrouve les composants commutés qui sont modélisés comme des sources de courant et commandées par l'état qui provient du circuit. Les composants non linéaires sont modélisés à l'extérieur du modèle linéaire. Comme dans Hypersim, l'effet du changement de zone linéaire de fonctionnement a un pas de calcul de retard.
On peut utiliser différents modèles pour représenter les éléments commutés, mais avec la discrétisation, il y a seulement le modèle de résistance pure variable qui est disponible. La résistance est représentée par une source de courant, commandée par l'état des composants, dans la partie linéaire de l'algorithme.
calcul
Ce chapitre présente les notions et principes liés aux simulations à plusieurs pas de calcul et plus précisément pour le double pas de calcul, soit la présence d'un seul point de découplage, séparant deux systèmes avec des pas de calcul différents, dans un réseau électrique.
Le chapitre présente premièrement les avantages généraux de la simulation à double pas de calcul et présente un exemple de réseau électrique avec un équipement électronique de puissance pouvant bénéficier du double pas de calcul.
Les problématiques associées au double pas de calcul sont présentées ainsi que les résultats des études publiées dans la littérature. Les critères d'évaluation de la précision des résultats, qui sont utilisés pour évaluer les problématiques de la méthode, sont ensuite introduits. La dernière section présente un exemple de circuit monophasé simple permettant d'illustrer l'implantation d'un point de découplage à double pas de calcul. Le circuit a été choisi de façon à illustrer la séquence d'échange d'information dans un contexte de simulation temps réel. Il permet également d'illustrer quelques problématiques.
3.1. Introduction au double pas de calcul
L'objectif d'utiliser deux pas de calcul est d'éviter d'avoir à utiliser un simulateur très performant pour l'ensemble de la simulation, qui permettrait d'atteindre le pas de calcul nécessaire pour un modèle qui présente une dynamique rapide. On propose donc d'utiliser du matériel plus performant pour le modèle rapide et de conserver un pas de calcul lent pour le reste de la simulation, qui est atteignable par le matériel standard.
La Figure 13 présente un exemple de réseau comprenant un convertisseur de puissance qui pourrait bénéficier du double pas de calcul dans un contexte de simulation temps réel. Pour appliquer le double pas de calcul, il faut mettre un point de découplage entre la partie lente et la partie rapide. Le point de découplage permet de faire l'échange de tensions et de courants entre les deux systèmes d'équation, mais il provoque une perturbation des résultats. Un exemple de point de découplage avec sources commandées est présenté en fin de chapitre.
c •—• c e
P n v - w r n W 26IV. 100MVA B 1 VO««g»SoiM» Syaan
Contrôleur physique Figure 13 : Réseau électrique comprenant un D-STATCOM avec double pas de calcul
On peut observer la partie lente (50 ps) du réseau qui est connectée à la partie rapide (1-5ps) via un point de découplage. Il est aussi possible d'observer le contrôleur réel qui donne des signaux de commande rapide au convertisseur simulé dans la partie rapide. Ce contrôleur prend des lectures de tension et de courant du côté lent et impose une commande par modulation de largeur d'impulsion dans la partie rapide. C'est ce contrôleur réel qui nécessite une simulation temps réel.
3.2. Problématiques du double pas de calcul
Il y a trois problématiques associées à l'implantation du double pas de calcul : l'instabilité numérique, le retard de communication du point de découplage et la différence de la largeur de bande des deux régions simulées.
L'instabilité numérique s'avère très peu documentée et dépendante de nombreux facteurs. On attribue typiquement la source de l'instabilité à un problème de conditionnement de matrice et de topologie réseau. Le présent travail présente les actions réalisées pour stabiliser la simulation.
Le retard provient du fait que les régions découplées ne partagent pas le même système d'équation. L'échange d'information doit donc être réalisé suite à un délai équivalent à un pas de calcul de la région lente. La région lente doit premièrement évaluer la tension ou le courant à passer du côté rapide. La partie rapide peut ensuite utiliser cette valeur, après un certain délai de communication, pour réaliser les calculs rapides. La valeur finale calculée par la partie rapide est ensuite retournée, après un autre délai de communication, à la partie lente. Dans [15], on associe les formes d'onde non caractéristiques de la tension au nœud de découplage à cet effet de retard de communication.
La différence de largeur de bande est la dernière problématique du double pas de calcul. Pendant les calculs de la partie rapide, la variable d'état passée par le côté lent demeure fixe. Cependant, en réalité, cette variable devrait continuer d'évoluer pendant le pas de calcul et son influence n'est pas considérée dans la partie rapide. De façon à limiter cet effet, la variable d'état utilisée du côté lent est typiquement liée à un élément réactif important qui limite la variation.
Dans [17], un procédé d'extrapolation est utilisé afin de prédire la prochaine valeur de la variable d'état du point de découplage. Il est mentionné que ce procédé provoque moins d'erreurs. L'auteur utilise de l'interpolation linéaire pour déterminer la valeur instantanée à utiliser dans la partie rapide.
Le système lent est aussi affecté par cette problématique, il reçoit la valeur finale calculée du côté rapide. Comme le contenu harmonique de la partie rapide est plus étendu que celui
de la partie lente, la valeur finale passée peut ne pas être représentative du comportement moyen. Pour limiter cet effet, à l'instar du côté lent, on tente d'utiliser une variable d'état liée à un élément réactif important.
Ce problème est approché dans [17], avec l'application d'une moyenne sur l'ensemble des points de la simulation rapide sur un pas de calcul de la simulation lente. Cette approche a été préférée après avoir appliqué une moyenne glissante et un filtre passe-bas.
Tel que mentionné plus tôt, en simulation temps réel, il est parfois nécessaire de placer un point de découplage, à pas de calcul unique, de façon à diviser une matrice de sous-système trop importante pour être résolue en temps réel. L'implantation peut être diverse, mais dans tous les cas, le point de découplage induit un retard de passage des variables d'état. Dans ce cas particulier, on rencontre uniquement l'effet du retard de communication.
3.3. Résultats des études antérieures
Le principe général de la simulation à pas de calcul multiples consiste en l'intégration numérique de groupes de variables d'état avec une largeur de pas de calcul adéquat pour représenter les phénomènes locaux dans chaque groupe de variables d'état. La simulation à pas multiple est un concept relativement simple, mais il demeure beaucoup de problèmes et de questions ouvertes en ce qui concerne la théorie, les expressions décrivant la précision, la stabilité ainsi que sur leur implantation [16].
En [16] et [21], les auteurs présentent une approche pour le choix du pas de calcul des régions de façon à rencontrer les critères de précision, stabilité et convergence. Ils optimisent le choix du pas de calcul de chaque groupe de variables d'état de façon à obtenir le plus grand pas de calcul possible permettant de rencontrer Terreur maximale permise (LTE - Local Truncation Error). Ils n'utilisent cependant pas d'équipement électronique de puissance présentant un fonctionnement détaillé.
Dans [14] et [15], les auteurs implantent le double pas de calcul pour découpler un circuit électronique de puissance d'un réseau électrique. Dans les deux cas, on observe un comportement acceptable du circuit, mais dans [15], l'auteur mentionne la présence d'ondulations importantes, non caractéristiques, sur la tension du point de découplage.
Le procédé d'intégration généralement utilisé est le procédé d'intégration trapézoïdale pour chaque région découplée [14] [16]. Dans [15], Euler arrière est utilisé du côté rapide afin d'éliminer l'oscillation numérique provoquée par la méthode trapézoïdale lors de la commutation naturelle sur un élément inductif.
On rappelle une utilisation particulière de point de découplage en simulation de réseau, sans double pas de calcul. Il est parfois nécessaire de découpler une partie de réseau qui ne comporte pas de lignes suffisamment longues pour avoir un retard naturellement présent. Il est alors nécessaire de mettre un point de découplage pour être en mesure de respecter le temps réel. Typiquement, on place le point de découplage sur un élément fortement réactif qui présente une inertie importante sur sa variable d'état.
Il est connu que de placer le point de découplage sur un élément réactif permet de réduire son effet déstabilisant. Il est aussi connu que pour aider à la stabilité, il est possible d'augmenter la valeur de Télément réactif ou d'ajouter des résistances en parallèle avec le point de découplage. Cependant, ces modifications viennent inévitablement modifier les résultats de simulation, tout comme le retard du point de découplage. Typiquement, on s'intéresse premièrement à obtenir une simulation stable et qui donne des résultats acceptables pour valider le comportement de l'équipement en rétroaction avec la simulation.
Le travail va comparer des résultats obtenus avec un point de découplage à simple et double pas de calcul.
3.4. Critères d'évaluation de la précision des résultats
L'erreur de calcul provoquée par un point de découplage se trouve dans le temps, c'est-à-dire qu'à un instant donné, il existe une différence entre une simulation de référence et la simulation à double pas de calcul. L'évaluation de Terreur est généralement réalisée en observant le contenu spectral des signaux de courant et de tension de chaque côté du point de découplage. Le contenu spectral permet de mettre en évidence l'impact de la méthode à double pas de calcul sur le taux de distorsion harmonique et sur la distribution des harmoniques.
C'est le critère de quantification de Terreur typiquement utilisé en simulation de réseau puisqu'il évalue Terreur de façon globale. L'observation du contenu spectral permet de mettre en évidence des effets du point de découplage qu'il serait impossible de constater uniquement en observant les formes d'onde. Il est d'autant plus nécessaire d'avoir un critère global en sachant que les signaux observés s'échelonnent typiquement sur plusieurs périodes du réseau.
Un second critère global, qui peut être utilisé, est la mesure de l'énergie ou de la puissance échangée au point de découplage. C'est un critère d'évaluation global qui peut renseigner sur la précision des résultats. Il n'y a cependant pas de référence de l'utilisation d'une telle méthode appliquée à un point de découplage, ce travail présente donc les mesures de puissance réalisées de chaque côté du point de découplage. Il est intéressant de noter que certains auteurs ont utilisés ce principe pour déterminer Terreur d'échange d'énergie à chaque pas de calcul. Cela était réalisé afin d'appliquer une correction sur le pas de calcul utilisé et réduire itérativement cette erreur à un seuil acceptable [22]. Ce n'était pas appliqué à un contexte de simulation temps réel.
Le prochain exemple présente l'implantation d'un point de découplage à double pas de calcul ainsi que la séquence d'échange d'information qui est imposée dans un contexte de simulation temps réel. Les problématiques de la méthode y sont introduites.
3.5. Exemple d'un circuit monophasé
Le circuit de la Figure 14 correspond à un modèle simplifié de redresseur sur lequel on implante (Figure 15) un point de découplage à double pas de calcul, dans le but d'une implantation temps réel. L'objectif est de présenter la séquence d'échange d'information aux premiers pas de calcul de la simulation à double pas de calcul pour une implantation temps réel. Cela va mettre en évidence le problème au niveau de l'échange de puissance et le problème associé au fait d'avoir des dynamiques éloignées.
Le circuit comporte une source de tension sinusoïdale commandée en série avec une impédance de source. Le redresseur actif est composé d'interrupteurs idéaux et d'un condensateur en parallèle avec une charge résistive. La commande appliquée ne permet pas de réguler la tension, l'objectif de la commande est uniquement d'imposer des changements d'états dans les premiers pas de calcul.
Discrete, Ts = 5e-0G s. powergui
fV
m
>-VW-W—
Impedance source Source©
FV
Sine Wave commti
NOT Charge Bus.DCT
NOTI
Figure 14 : Circuit monophasé sans point de découplageSéparons maintenant la dynamique lente de la dynamique rapide. La dynamique lente est du côté source et impédance de source alors que la dynamique rapide est du côté redresseur. Posons que nous utilisons un pas de calcul de 50 ps du côté lent et que nous conservons un pas de 5ps du côté rapide. On peut découpler les deux sections à l'aide de sources de tension et de courant qui sont commandées par des lectures réalisées du côté opposé.
On doit premièrement déterminer comment faire l'échange d'information. Sur la Figure 15, on peut observer la présence d'une source de tension du côté lent et d'une source de courant du côté rapide. On peut rapidement se convaincre qu'on n'aurait pu faire l'inverse sans rencontrer une condition de source de tension en parallèle avec un condensateur et une source de courant en série avec une inductance. Il faut donc adapter le point de découplage en fonction des conditions présentes.
Discrete, Ts = 5e-05 s.
r—vw-w--Impedance de source SourceO
Partie lente©
It|* v | - i X i y «nim-ll [_£ L8
Sine Wave t^fjjztmm] I Retard L[i_taàdêî>*J Echange d ' i n f o r m a t i o n - » < | V | « i ' l rK^ïjëtoDDH
m
50us 50U3 o i Sus '■
a Bloqueur* d'ordre zéro
:6>
Partie rapide Discrete, Ts = 5e-06 s NOT S1 CM3.
NOT Charge —VW-—iH (
-v , OT|jrlil
E ' CM en i r iFigure 15 : Circuit monophasé avec point de découplage
On doit noter l'ajout de plusieurs blocs de retard et d'un bloqueur d'ordre zéro dans la section d'échange d'information. Un retard a également été ajouté entre la commande et la source sinusoïdale. Ces éléments ont deux objectifs : rendre la séquence de résolution conforme à celle obtenue dans des conditions temps réel et gérer l'aspect de double pas de calcul.
Pour rendre la séquence conforme à celle d'un simulateur temps réel, on doit considérer l'effet du retard d'un pas de calcul entre l'application d'une commande à une source et la disponibilité des résultats de tension et de courant aux différents endroits dans le circuit. Comme SPS donne le résultat de façon instantané, on peut compenser cet effet en lui passant les commandes en retard. La lecture des résultats se fait donc dans le bon pas de calcul. Cela peut devenir important pour synchroniser des événements si on compare les résultats avec un simulateur temps réel. Ce sont les retards encerclés qui remplissent cette fonction. Pour le côté rapide, on a préféré mettre le retard en sortie pour illustrer l'impact de la position du retard (voir la Figure 16).
Pour gérer le double pas de calcul, on passe la valeur finale calculée de chaque côté de l'autre côté en ajoutant un retard de communication d'un multiple entier du pas de calcul utilisé du côté lent. On choisit un retard égal au pas de calcul lent. En pratique, il est raisonnable d'atteindre un temps de communication inférieur à 50 ps.
La Figure 16 permet d'observer les différents signaux identifiés sur la Figure 15. Pour analyser la séquence de fonctionnement, il est plus simple de se concentrer sur les premiers pas de calcul de la simulation. La séquence s'analyse complètement sur cinq pas de calcul en suivant l'effet de l'application d'une tension non nulle (à t = 50 ps).
1. Durant le premier pas de calcul lent, les tensions et courants sont calculés du côté lent. Le résultat de courant à donner au côté rapide devient disponible après 50 ps. 2. Durant le second pas de calcul lent, la valeur de courant calculée au pas précédent
est transférée du côté rapide de la simulation.
3. Durant le troisième pas de calcul lent, la valeur de courant est disponible du côté rapide pour calculer la tension aux bornes du condensateur. Après 10 pas de calcul rapide, le résultat de tension finale est disponible.
4. Durant le quatrième pas de calcul lent, la valeur finale de tension calculée du côté rapide est transférée du côté lent.
5. Durant le cinquième pas de calcul lent, les calculs sont réalisés du côté lent avec l'effet de la rétroaction de la tension calculée du côté rapide.