Conception et intégration d'un capteur LIDAR 3D pour la navigation autonome des robots mobiles en terrain inconnu
Texte intégral
Figure


Documents relatifs
Cette figure montre le bon fonctionnement de l’auto alimentation au blocage du transistor principal car un courant Ids_aux circule alors dans le transistor auxiliaire
Au del`a de 95% de charge (Fig. 5), on remarque que la station perd compl`etement le contrˆole et le robot ne peut pas atteindre la cible. Le retard dans ce cas d´epasse dans
Les fonctions rationnelles (quotient de fonctions polynômes) sont de classe C 1 sur leur intervalle de définition..
le mod` ele continu est approch´ e avec une erreur d’ordre connu cette erreur d´ epend des pas caract´ eristiques de discr´ etisation l’ordre de pr´ ecision quantifie la variation
Les relations entre l’espace 3D et le plan image sont alors définies pour un nombre fini de points et des algorithmes d’interpolation numérique permettent d’approximer les
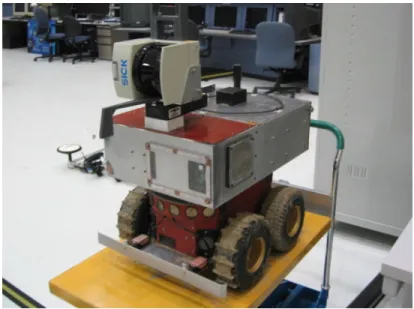
Dans le cadre de projets de recherche sur le véhicule autonome, nous avons développé un équipement embarqué se présentant comme un coffre de toit qui a été instrumenté pour
Les cam´eras sont devenues des capteurs quasi-in´evitables pour les probl`emes de perception dans les v´ehicules intelligents.. En effet, ce type de capteur peut fournir une
Nous présentons dans cette section les résultats de l’implémentation de l’architecture pro- posée à la section 5.4 pour l’intégration de la localisation globale, du suivi
