uL
i?70
N 73*
FACULTE DES SCIENCES DE L'EDUCATION
T H E S E
PRESENTEE A L'ECOLE DES GRADUES DE L'UNIVERSITE LAVAL COMME EXIGENCE PARTIELLE POUR L'OBTENTION DU GRADE
DE
DOCTEUR EN SCIENCES DE L'EDUCATION (PEDAGOGIE DE LA MATHEMATIQUE)
PAR
G. EDWARD NJOCK
B . S C , M.A. (IN MATHEMATICS) UNIVERSITY OF ARIZONA
EXPLORATION DE LA NOTION GEOMETRIQUE D'AIRE DES POLYGONES PAR UN GROUPE DE TRANSFORMATIONS DU PLAN EUCLIDIEN
A mes parents, Cécile et Simon Pierre Njock Bôt A ma femme, Barbara J.
La genèse aussi bien que l'évolution des "objets géométriques" ont toujours suscité chez les mathématiciens pédagogues un grand intérêt. On constate qu'en géométrie l'association de certains objets entre eux conduit fréquemment à l'apparition d'objets géométriques nouveaux. Par exemple, la notion de direction résulte d'une classification des droites au moyen de la relation de parallélisme définie sur l'ensemble des droites; les droi-tes à leur tour sont constituées d'objets primitifs appelés points; et les points ... de quoi sont-ils constitués? Euclide définissait le point com-me ce qui n'a pas de partie. Cette définition diffère-t-elle de celle qu'on donne de l'atome en physique? Peut-on parler d'une théorie atomique de la géométrie? La matière de support d'une telle théorie ne serait-elle pas un ensemble dont les éléments seraient des points?
Pendant un cours sur la genèse de la géométrie dû à Monsieur le pro-fesseur Fernand Lemay, l'auteur s'est familiarisé avec ces questions. Leurs implications pédagogiques et mathématiques ainsi que leur complexité posent des problèmes de recherche.
On distingue deux espèces d'objets géométriques, les objets primitifs et les objets composés: les primitifs constituent le plan n dont les élé-ments sont des points; les composés sont formés par un processus qui con-siste à prendre des couples et des parties à partir des éléments de n. Ce processus qu'on n'illustrera pas tout de suite permet d'accéder à une va-riété d'objets géométriques à partir de n en se limitant à la formation de couples et de parties.
La conception des objets géométriques évolue au cours des âges; par exemple, la notion d'espace a dépassé le cadre géométrique classique pour donner lieu à de nouveaux concepts mathématiques tels l'espace topologique, l'espace vectoriel, l'espace probabiliste. Quoi qu'il en soit, il n'en reste pas moins qu'au centre de l'activité géométrique se situe le problème de la définition des objets géométriques. Or, une des meilleures façons
de connaître ces objets consiste à les soumettre à certaines transformations, puis d'étudier ensuite les propriétés qui changent et celles qui restent invariantes. Par exemple, lorsque dans un plan euclidien n, on transforme une figure recti ligne F par une symétrie centrale, la transformée F' de F par cette symétrie est-elle identique â F? Y a-t-il quelque chose de changé? En général, certaines propriétés d'objets sont changées et d'autres
main-tenues au cours des transformations. Ces propriétés peuvent être relatives aux distances, aux angles, aux orientations, aux étendues et à bien d'autres choses encore.
L'activité géométrique est soutenue par un "langage géométrique"; ce langage a trouvé sa forme la plus élégante et la plus naturelle dans les ensembles de transformations et leurs structures. En effet, le fait que dans le plan, certains ensembles de transformations soient munis d'une struc-ture de groupe a conduit à une vue nouvelle du sens profond de la géométrie.
11
Dans une optique due à Felix Klein (1872) la géométrie devient une étude des figures qui peuvent s'appliquer les unes sur les autres par un groupe de transformations, et des propriétés des figures qui res-tent inchangées lorsqu'on applique les transformations du groupe.
Alors qu'autrefois, l'intérêt de l'étude de la géométrie portait principalement sur les questions de mesure, aujourd'hui on semble s'in-téresser d'abord aux choses qui précèdent la mesure comme le repérage et le problème du transport des objets géométriques.
Le travail qui suit est une présentation de la notion géométrique d'aire des polygones s'inscrivant dans la perspective que nous venons de décrire, â partir d'une théorie de la G-équivalence développée par Mon-sieur le professeur Fernand Lemay. Ce travail s'adresse aux guides du renouveau et de la réforme mathématique, et à tous ceux qui s'intéressent à l'enseignement moderne de la géométrie comme étude des invariants.
J'exprime ma gratitude â mon patron, Monsieur Fernand Lemay, qui m'a non seulement suggéré le sujet de thèse, mais qui a aussi su n'apporter, en plus de ses directives précieuses, son aide et son encouragement aux moments les plus propices. Son sens critique inspiré par son amour pour
l'enseignement des mathématiques restera toujours pour moi un exemple. Sans lui ce travail n'aurait pas vu le jour; il trouvera ici l'expression de ma plus vive reconnaissance pour tous les services qu'il m'a rendus pendant mon séjour à l'Université Laval.
Mes remerciements s'adressent aussi aux autorités de l'Université Laval, de la Faculté des Sciences de l'Education et, plus particulière-ment, au Doyen de cette Faculté, Monsieur Jean-Yves Drolet, pour l'atten-tion bienveillante et l'appui qu'il m'a toujours accordés.
Nous sommes redevable à Monsieur le professeur Mohammed Ishaq, du département de Mathématiques de la Faculté des Sciences de l'Université Laval, et Monsieur Claude Boucher, du département de Mathématiques de la
Faculté des Sciences de l'Université de Sherbrooke, d'avoir bien voulu relire le premier manuscrit de ce travail et apporter des suggestions.
Enfin, qu'il me soit permis de remercier tous ceux qui, de façon di-recte ou indidi-recte, m'ont aidé dans ce travail.
1. Klein, Felix, Vergleichende Betrachtungen Uber neuere geome-trische Forschungen, Erlangen, 1872. Imprimé dans Mathematische Annal en, vol. 43, p. 63 et seq., 1893.
AVANT-PROPOS i
TABLE DES MATIERES . . . îii
TABLE DES SYMBOLES . . . vi
INTRODUCTION: PROBLEME ET SOURCES 1
Chapitre
I DEFINITIONS DE BASE ET GENERALITES
1 - Triangles et polygones en termes de convexité dans n 11
2 - Le parallélisme et l'idée de direction 15
3 - Les transformations de n et la structure de groupe . 16
II LA G-EQUIVALENCE
1 - Définition 19
2 - Lemmes sur les triangulations 20
3 - La G-équivalence comme relation d'équivalence . . . . 24
4 - Exemples de relations de G-ëquivalence 24
III LA G-EQUIVALENCE ET LA NOTION D'ETENDUE
1 - Symétrie oblique . 26
2 - L'étendue en termes de G-ëquivalence 28
IV
Chapitre Page IV COMPOSES SPECIAUX DE SYMETRIES OBLIQUES
1 - Transvections 32 2 - Détermination d'une transvection 37
3 - Applications didactiques 40 (a) "Golf géométrique" 45 (b) Représentation d'une étendue par un triangle
de côté imposé . . ; 47 4 - Comparaison des étendues 54 5 - Le théorème fondamental 57 V PARTITION DE G DETERMINEE PAR L'ORIENTATION DES TRIANGLES
1 - Triangles orientés et la relation de "même
orientation" 62 2 - Effets des symétries et des transformations G sur
l'orientation des triangles 65 3 - Classification des transformations de G 67
VI CONSTRUCTION D'UNE FONCTION D'AIRE
1 - Le problème 71 2 - Paramétrisation des étendues • • • ?5
VII LES POSTULATS CLASSIQUES D'AIRE DU POINT DE VUE DE LA G-EQUIVALENCE
1 - Les postulats classiques de la fonction d'aire des
polygones 79 2 -Postulats devenus théorèmes 80
VIII AVANTAGES DE CETTE ANALYSE
1 - Considérations didactiques 88 2 - Considérations mathématiques 91
CONCLUSION 93 BIBLIOGRAPHIE . . . 95
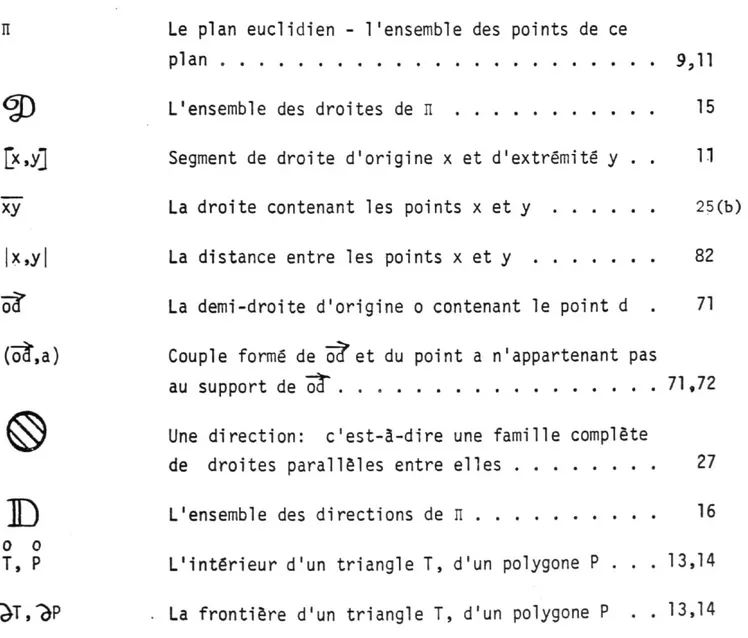
TABLE DES SYMBOLES
D'une manière générale, les points du plan n seront désignés par des
lettres minuscules; autrement, des spécifications seront données
explici-tement dans le contexte. Certaines parties de n et certaines
transforma-tions de n seront désignées par des lettres majuscules. Les lettres
grecques désigneront les directions de n. Dans une notation particulière,
a désignera aussi la mesure d'aire; il n'y aura aucune ambiguïté possible
avec ce double usage de a. Les numéros renvoient aux pages où les
symbo-les apparaissent pour la première fois dans l'exposé. Les symbosymbo-les
ma-thématiques usuels sont sous-entendus.
Page
n Le plan euclidien - l'ensemble des points de ce
plan 9,11
^ P L'ensemble des droites de n 15
{x.yj Segment de droite d'origine x et d'extrémité y . . 11
xy La droite contenant les points x et y 25(b)
|x»y| La distance entre les points x et y 82
ôa La demi-droite d'origine o contenant le point d . 71
(ôH\a) Couple formé de ôcTet du point a n'appartenant pas
au support de ôcT 71,72
Une direction: c'est-à-dire une famille complète
de droites parallèles entre elles 27
[j L'ensemble des directions de n 16
o o
T, P L'intérieur d'un triangle T, d'un polygone P . . . 13,14 ^ T , ^ P . La frontière d'un triangle T, d'un polygone P . . 13,14
Page
t) L'ensemble des polygones de n 18
V _ ^
nL'ensemble des permutations de n 18
A Symétrie oblique d'axe A, suivant la direction a 26
? L'ensemble des symétries obliques de n 27
G Groupe engendré par les symétries obliques . . . 19,29
p
Pr-v P' ou P — • P' Les polygones P et P' sont G-ëquivalents .... 19
K& L'ensemble des colinéations de n 18
a) L'ensemble des isométries de n 29
^P « L'ensemble des transvections d'axe Ae_) . . . . 32
G L'ensemble des transformations directes . . 61(c),67
G" L'ensemble des transformations indirectes
(ou Retournements) . . . 61(c),67
OC
:J--*rK
Lafonction d'aire des polygones 71
INTRODUCTION
PROBLEME ET SOURCES
LE PROBLEME
A lire les manuels en usage dans les cours de géométrie des classes du second degré, on constate que l'aire d'un triangle est fondée sur la mesure de la base et de la hauteur, c'est-â-dire sur la mesure des distan-ces. A un processus géométrique véritable est donc substituée une méthode arithmétique. Il s'agit de réussir à définir l'aire des polygones par des moyens proprement géométriques pour ne passer qu'ensuite au domaine des calculs arithmétiques.
i
"L intention d'une théorie des aires des polygones est de par-venir â associer à tout polygone une mesure numérique qui en ex-prime "l'étendue". Cependant, l'aire ne caractérise pas un polygone: des polygones distincts peuvent avoir même aire, de sorte qu'associer une aire aux polygones, c'est aussi les clas-sifier. Nous obtenons ici l'aire à la suite d'une classification des polygones que déterminera la relation "avoir même étendue"." Il s'agit donc de sélectionner adéquatement parmi l'ensemble des
transfor-1. Lemay, F. et Njock, Ed., Notion d'étendue, Bulletin de l'Associa-tion Mathématique du Québec, vol. XI, No 3, été 1969, pp. 38-50,
ble de ces transformations, et de montrer comment cette structure permet de définir la notion géométrique d'aire des polygones. Ainsi la thèse se propose de présenter une théorie des aires des polygones fondée sur l'ex-plicitation de la notion d'étendue, l'étendue étant elle-même invariante par le groupe de transformations engendré par l'ensemble des symétries obliques. Pour ce faire, nous avons procédé par étapes:
1. Introduire une famille d'équivalences que nous associerons â tout groupe de transformations du plan, de façon â déterminer une classification de l'ensemble des polygones.
2. Déterminer un groupe particulier de transformations dont l'usage puisse se prêter avec souplesse au traitement des problèmes con-ventionnels des aires des polygones.
3. Une fois la notion d'étendue d'un polygone clairement définie, construire une application numérique associant â toute étendue une aire.
4. Comparer les résultats de la théorie de Monsieur Lemay avec les approches conventionnelles.
5. Procéder â l'extension de cette théorie au cas des triangles orientés.
6. Illustrer les avantages pédagogiques et mathématiques de cette analyse.
-LES SOURCES
Nous distinguerons entre sources primaires et sources secondaires: les premières sont l'apport direct et immédiat d'une théorie conçue par mon patron de recherches; les deuxièmes sont des points de vue
complémen-taires et connexes au problême général de l'aire et un aperçu chronologi-que de l'évolution de ce problème de l'antiquité à nos jours.
Sources primaires
Cette thèse doit â Monsieur le professeur Fernand Lemay l'originali-té de sa théorie des aires fondée sur la G-ëquivalence et le résultat du théorème fondamental de cette théorie. Nous lui empruntons aussi cette intéressante application didactique qu'est le "golf géométrique" et une notation commode des directions du plan.
La contribution explicite de l'auteur de cette thèse réside dans la réalisation des démonstrations des résultats énoncés sans preuve par le professeur Lemay, et que nous retrouvons, â l'exception du théorème fon-demental, dans l'article de VAMQ mentionné plus haut, dans l'adjonction des lemmes et propositions préalables â certains résultats de cette théo-rie, dans l'extension de la théorie au cas des triangles orientés, dans la comparaison de la théorie avec l'approche conventionnelle, et enfin dans la présentation de commentaires didactiques résultant de l'expérimen-tation de cette théorie avec un groupe de futurs enseignants du second de-gré.
aires des polygones. En particulier, Euclide et les Pythagoriciens dans l'Antiquité grecque ont posé le problême de chercher l'aire d'un polygone donné et l'ont examiné avec le génie de leur époque. Ces travaux permet-tent de constater que l'atpermet-tention des chercheurs antiques a été attirée non seulement par le calcul des aires, mais aussi par les constructions géométriques visant à conserver l'aire d'un polygone tout en changeant sa forme. Par exemple, un de leurs problêmes de base consistait â construire un carré d'aire égale à celle d'un polygone donné. On peut retrouver des constructions destinées à résoudre ce problême dans les éléments d'Euclide .
Les problêmes de ce genre visaient souvent une fin pratique. En effet, les architectes de l'époque en faisaient usage dans leurs
ëdifica-2 tions des monuments .
Les méthodes pratiques utilisées par ces gens n'étaient guère fon-dées sur des preuves rigoureuses, ainsi plusieurs de ces constructions
3
géométriques étaient inexactes . Le premier traité sur ce problème de base est l'oeuvre du célèbre mathématicien et astronome perse du Xe siècle,
1. Eléments d'Euclide - Livre I, propositions 42, 44, 45 - Livre II, proposition 14.
2. Mathematics Staff of the College, University of Chicago, voir A problem on the cutting of squares, The Mathematics Teacher, May 1956, p. 332. 3. Ibid., p. 332.
AboQl Wafi . La substance de son travail sur les constructions
géométri-ques s'adresse d'abord aux techniciens et surtout aux architectes.
Du point de vue de la "mathématique d'aujourd'hui", dès qu'on se
rappelle que jusque là, la théorie des ensembles n'était pas encore née,
et que, par conséquent, les structures algébriques de "groupe" et de
"corps" n'étaient pas encore explicitées, on comprend pourquoi ces
constructions géométriques ne pouvaient être effectuées au niveau d'un
lan-gage mathématique basé sur la notion de "groupe de transformations".
Mais déjà les rudiments des concepts d'invariant et de transformation
étaient présents chez les Grecs. Ce n'est que plus tard, au XIXe siècle
que Félix Klein (1872) précisera ces concepts et en fera le centre
d'in-térêt de toute étude de la géométrie.
De nos jours, les mathématiciens ont mis sur pied une fonction dite
f2D9_l2D__l§lrË
C1
U1' associe à tout polygone un nombre appelé l'aire de
ce polygone et caractérisée par des propriétés bien connues.
Bien sQr, la notion d'aire des polygones est-elle présentée de
fa-çon plutôt arithmétique que géométrique dans nos manuels de
l'enseigne-ment du second degré; souvent, on a l'impression que l'aire dépend ainsi
de la mesure des distances. Nous excluons ici cette façon de voir qui
perd son sens géométrique précis.
1. WafS, Abottl, A book on geometric constructions , traduction
fran-çaise, dans Journal Asiatique, 1855, pp. 309-359.
de vue diffèrent d'un auteur à l'autre» Wilson (1903) envisage une théo-rie des aires sans l'aide de la théothéo-rie complète de congruence. La mé-thode est basée sur le fait qu'une colinéation ëquiaffine peut être
ex-3
primée comme un produit de transvections . La notion de parallélisme joue le rôle central dans sa théorie; voici ce qu'il écrit (p.30):
''The__dea_t__refore_w__ch_enters_nece
92D2§_llr_2r_lËD__;__l§__:b§_l_Êa °f parlai 1 el lines_and only_that".
Plus tard, Wilson et Lewis (1912) proposent un autre traitement de la notion d'aire, cette fois une approche basée sur le groupe formé par les translations et les symétries centrales.
1. Wilson, E.Bo, A generalized Conception of Area: Applications to Collineations "in the plane, Annals of Mathematics, vol. V (2nd series) 1903, pp. 29-45.
2. C'est une colinéation affine qui conserve l'étendue. Une défini-tion équivalente est donnée dans Veblen and Young, Projective Geometry, vol. II, Ginn and Company, Boston, 1918, p. 105. 3. Nous aurons l'occasion de préciser ce terme au chapitre IV. 4. Wilson and Lewis, The Space Time Manifold of Relativity,
Proceed-ings of the American Academy of Arts and Sciences, vol. XLVIII, 1912, pp. 396-405.
En 1918, Veblen et Young consacrent quelques paragraphes sur l'aire des triangles à partir de l'idée d'équivalence des triplets de points (point triads) par des translations et des symétries centrales et en ar-rivent à une théorie complète d'équivalence d'aire des triangles.
Ils soulignent dans leur exposé que la théorie de la mesure des po-lygones relève essentiellement du domaine propre de la géométrie affine. Il est important de noter que l'aire d'un triangle, donnée en fonction de la base et de la hauteur renferme les idées de distance et de perpen-dicularité; ainsi la formule classique de l'aire d'un triangle en fonction d'une base et de la hauteur relative à cette base relève de la géométrie métrique; or les restrictions métriques ne s'appliquent pas à la
défini-tion d'équivalence des triplets de points donnée par Veblen et Young (Projective Geometry, vol. II, p. 96).
Certains travaux restent basés sur une vieille idée de découpage des polygones et transport des morceaux au moyen des isomêtries. La lo-cution "deux polygones équidécomposables" qu'on rencontre dans les écrits
2
de Boltyanskii est définie â partir d'une dissection d'un polygone en un nombre fini de parties polygonales qu'on peut réarranger pour former l'autre polygone. Une telle définition implique intuitivement l'égalité d'aire entre deux polygones équidécomposables. Cependant la définition
1. Veblen and Young, Projective Geometry, vol. II, Ginn and Company, Boston, 1918, chap. Ill et IV.
2. Boltyanskii, Y.G., Equivalent and equidecomposable figures, Boston, D.C., Heath and Company, 1956.
de polygones équidécomposables n'implique pas sa réciproque à savoir que deux polygones de même aire sont équidécomposables. C'est à Bolyai (1832) et Gerwin (1833) qu'on doit le théorème de l'équivalence entre l'égalité d'aire et 1'équidécomposabilité des polygones. Il est intéressant de noter en passant, que cette équivalence, valide dans un espace vectoriel à 2 di-mensions, n'est pas toujours généralisable dans 3 dimensions (cas des vo-lumes des polyèdres). Par conséquent, une exploration analogue du concept de volume serait essentiellement plus difficile.
La découverte de Bolyai et Gerwin ouvre quand même la porte à des questions telles que le nombre et la distribution des parties qui compo-sent les polygones de même aire, les conditions que doivent satisfaire ces parties.
Les travaux effectués et les conclusions tirées par les professeurs Hadwiger et Glur (1951) viennent confirmer le point de vue de Wilson et Lewis à savoir que les parties qui composent le premier polygone et leurs homologues qui constituent le deuxième polygone doivent avoir leurs côtés homologues parallèles. Le théorème de Hadwiger et Glur énonce que deux polygones de même aire sont équidécomposables par translation ou par sy-métries centrales.
En résumé, nous avons constaté plusieurs renvois à des techniques et résultats de la géométrie analytique, ou de la géométrie projective dans certains des travaux revus. D'autre part, la notion "d'étendue" ne nous a pas paru se dégager à partir des transformations de base qui
de-1. Boltyanskii, Y.G., Equivalent and equidecomposable figures, Boston, D.C., Heath and Company, 1956, p. 10.
2. Hadwiger, H. und Glur, P., Zerlegungsgleichheit ebener Polygone, Elemente der Mathematik, Band VI, No. 5, 1951, seiten 97-120.
vaient engendrer un groupe autre que le groupe des isométries. Ce qui est également frappant dans ces travaux, c'est le fait que l'aire soit
introduite sans aucune analyse préalable. L'aire n'était pas construite, au sens où on se propose de la construire ici; les articles et passages mentionnés en ont parlé comme d'un élément constitutif qu'on ne remet pas en question. Nous pensons aussi que le groupe formé par les translations et les symétries centrales n'est pas essentiellement la base de l'idée
"d'équivalence d'aire" comme certains travaux semblent le suggérer dans le plan euclidien, mais que ce soit plutôt le groupe engendré par les sy-métries obliques qui soit â la base de l'idée "d'équivalence d'aire". Comme on le verra dans la suite, ce groupe contient le groupe des isomé-tries du plan n.
Quant aux méthodes de la géométrie analytique, nous croyons devoir prévenir le lecteur pourquoi nous les négligeons dans cette étude. Par la suite, nous proposerons une approche plutôt synthétique basée sur les symétries obliques.
Edifier une géométrie analytique, c'est instituer un modèle arith-métique (au sens large) de l'espace. Or l'institution d'un tel modèle pose à son tour des problêmes difficiles dont la recherche sur les fon-dements des mathématiques n'a pas encore fait le tour. Peut-on par exem-ple, admettre que le rapport d'un modèle analytique à ce dont il est une représentation est un rapport d'adéquation entière et parfaite? Si dans ce qui suit, nous n'avons pas fait un usage systématique de la méthode analytique, signalons déjà que nous ne l'avons pas non plus systématique-ment écartée. Nous l'avons utilisée à titre de guide, mais non à titre
d'élément constitutif du développement théorique. Il est vrai que la méthode analytique confère une certaine autonomie au langage mathématique
sur l'espace; mais si le but qu'on se propose n'est pas de dégager cet aspect mathématique par les moyens les plus rapides et s'en tenir là, si l'on entend ne pas perdre immédiatement le contact avec l'aspect intuitif et surtout avec l'aspect expérimental de la géométrie élémentaire, la mé-thode analytique semble, de ce point de vue, sans aucun avantage de prin-cipe. Sous l'étiquette d'interprétation, elle rencontre tous les problê-mes auxquels l'approche synthétique essaie de répondre. C'est selon cette
dernière ligne de pensée que nous avons entrepris la théorie exposée dans cette thèse.
Signalons, à l'intention du mathématicien, que la théorie TCT expo-sée est baexpo-sée sur trois relations affines fondamentales: la relation
1 2 de linéarité, la relation de la moyenne et la relation "d'intéralitë" .
La relation d'intéralitë et celle de la moyenne appartiennent déjà au domaine de la mathématique unidimensionnelle; chacune d'elle permet de structurer l'ensemble des nombres réels. La relation de linéarité peut servir de base à l'idée de dimension; l'étude qui suit reste donc valide dans tout espace vectoriel bidimensionnel sur un corps ordonné.
1. Tout segment de droite admet un point milieu.
2. Ce mot traduira ici l'expression anglaise "betweenness" et l'expression allemande "zwischenheit" et signifie que si trois points distincts sont alignés, il y en a un qui est situé entre les deux autres.
CHAPITRE I
DEFINITIONS DE BASE ET GENERALITES
1. TRIANGLES ET POLYGONES EN TERMES DE CONVEXITE DANS n
Convexité
Soit un plan euclidien n. Une partie A de n est dite convexe, si pour tout couple (x,y) de points de A, le segment fermé [x,y] d'extrémités x et y est contenu dans A.
FIG. 1-1
(x,y)C A=*[x,y]C A
Un disque, une droite, un segment de droite, un ensemble réduit à un point, l'ensemble vide et n lui-même sont autant d'exemples de parties convexes du plan n.
collection quelconque (finie ou infinie) d'ensembles convexes est encore convexe; en particulier, la collection des parties convexes contenant un ensemble donné A aura comme intersection un ensemble convexe contenant A, et ce sera naturellement le plus petit des ensembles convexes contenant A, on l'appelle l<!,enyelogpe_çonyexe_de_A;
FIG. 1-2
Triangle
Soit a,b,c des points de n. On appellera triangle de sommets a,b,c l'enveloppe convexe de l'ensemble {a,b,c}. Voici un triangle de sommets a,b,c
13
La réunion [a»b]M[b,c]M[c,a] des segments déterminés par les sommets constitue le bord_(ou_la_frontiêre)_du_trian^ Le bord d'un triangle T pourra se noter /3T.
o
L^i_tërieur_d^un_triang22_X e s t l'ensemble T des points du triangle
qui ne sont pas sur son bord: o
T = T - *3T
Si tous les points d'un triangle T sont sur son bord ou, ce qui re-vient au même, si l ' i n t é r i e u r d'un triangle est vide, c'est-à-dire si
o
T = "èl ou T » <t>, on dira que T est un triançQe_déçjénéré. Voici des t r i -angles dégénérés
C
•a b
C
FIG. 1-4 Polygones et triangulationNous appelons polygone, toute réunion finie de triangles. Voici re-présenté un polygone
FIG. 1-5
L'intersection de deux polygones est soit un polygone, soit l'ensemble vide.
Un polygone P étant donné, on appellera triangulation_de_P toute fa-mille finie de triangles
(T.) (ou, par abus d'écriture, (T.) )
l£i_n 1
dont la réunion est P et dont les intérieurs sont disjoints deux à deux. Certains points d'un polygone P forment ce que nous appellerons le bord (ou la frontière) du polygone; ce sont les points qui pour toute trian-gulation de P ne peuvent qu'appartenir au bord d'un triangle (au moins) de cette triangulation. Le bord de P sera noté^P et nous dirons que V e n
-o
semble P des points du polygone qui ne sont pas sur le bord forment l'in-térieur de P:
o o P = {xeP s'il existe un T non-dégénéré, T_P|xeT}
Raffinement de triangulation
15
plus fine que T' (ou T' est moins fine que T)si tout triangle de T' est réunion de triangles de T. On dira aussi que T est un raffinement de T'.
FIG. 1-6
La triangulation pointillée est un raffinement de la triangulation en traits pleins.
Deux triangulations d'un polygone étant données, il se peut qu'au-cune des deux ne soit un raffinement de l'autre.
2. LE PARALLELISME ET L'IDEE DE DIRECTION (*)
Soit3) l'ensemble de toutes les droites du plan euclidien n. Les points d'une partie A C n sont dits çolinéaires s'il existe une droite de n contenant A. Les droites d'une partie X C H sont dites concourantes s'il existe un point appartenant à chacune des droites de X. Un point et une droite sont dits incidents si le point appartient à la droite.
* Les définitions du reste de ce chapitre se retrouvent dans plu-sieurs textes; nous les empruntons ici à la Géométrie projective de F. Lemay, Notes de cours polycopiées, Université Laval, 1969.
Parallélisme
La relation "coincider ou être disjoints" entre les éléments de s'appelle relation de parallélisme et se note ||.
La relation de || est une nelatioii_d^eguivalence, c'est-à-dire de façon précise qu'elle est:
reflexive : (on a D||D pour tout De«P)
symétrique : (D|| D'=->D'||D pour tout D et D ' e ^ )
transitive : (D|| D' et D'|| D"=^D||D" pour tout D, D', D"e8D).
Direction
La relation | détermine donc une partition deS) , c'est-à-dire une décomposition en classes disjointes. On appelle direction toute classe complète de droites parallèles entre elles. En désignant l'ensemble de toutes les directions du plan n parTD, on pourrait dire que X ) est le quotient deob par la relation d'équivalence ||
T_ -
3)/\
Ce qui signifie que I D s'obtient en "divisant"<3) en classes au moyen de la relation II.
3. LES-TRANSFORMATIONS DE n ET LA STRUCTURE DE GROUPE 1
Transformations
1. Un groupe est la donnée d'un ensemble muni d'une loi de composi-tion interne partout définie, associative, admettant un élément neutre et pour lequel tout élément est symétrisable.
17
Une transformation de n n'est autre qu'une application f de n dans lui-même:
f: n -*► n
"L'idée de transformation est extrêmement générale et il faut s'attendre à ce qu'une transformation tout à fait arbitraire puisse éliminer certains caractères des objets géométriques qu'aura fournis la structure géométrique étudiée. Il devient donc nécessaire de chercher et de choisir des transformations qui présentent certaines compatibilités avec la structure géométrique et qui conservent un minimum de caractères que possèdent les objets. Souvent les transformations qui conser vent certains caractères invariants constituent un "groupe" de transformations avec lequel il y a lieu de se familiariser.
Inversement, disposant d'un groupe de transformations, les ca ractères qui "survivent" aux transformations sont souvent des objets nouveaux crées par le groupe et dont l'étude est aussi une activité géométrique typique" (Géométrie projective de F. Lemay, p. 38).
Une transformation f: n > n qui conserve l'inégalité des points n'est autre chose qu'une injection, c'estâdire que si x et y sont deux points distincts, les transformés f(x) et f(y) seront distincts eux aussi:
x *y_*rf(x) =*f(y) ou, ce qui revient au même,
f(x) f ( y ) = > x y
Une transformation f: n —* n telle que tout point de n soit l'i mage d'au moins un point de n, en d'autres termes, telle que f(n) = n n'est autre qu'une surjection.
Une transformation f: n *~ n qui est à la fois injective et sur jective s'appelle une B§!C5ytation_de_n, c'est une bijection de n sur n.
On appelle colinéation de n toute permutation f: n >■ n qui trans forme les droites en droites; on montre facilement qu'une colinéation est compatible avec la relation de parallélisme.
En d'autres termes,
si D, D'e& et D||D'
alors f(D), f(D')eî) et f(D)||f(D')
On désignera par ^ l'ensemble des colinéations de n. Toute colinéation applique l'ensemble des polygones sur luimême.
Transformations de n et la structure de groupe
L'ensemble (s?7 des permutations de n, muni de la loi de composition
o qui,.au couple de permutations (f,g), associe la permutation définie par
f o g _ _ J . — * f ( g ( _ _ ) )
constitue un groupe , le groupe de toutes les permutations de n.
L'ensemble ^ d e s colinéations est un sousgroupe de (_?.., opérant dans l'ensemble (ydes polygones de n.
K Sur la notion de "groupe opérant dans un ensemble", voir Bourbaki, N., Algèbre, Livre II, structures algébriques, 2e edit., Paris, Hermann, 1951, chap. I, £ 7 , dernier alinéa du No 2.
CHAPITRE II
LA G-EQUIVALENCE
Définition 2-1. - Soit G _ _> un sous-groupe du groupe des colinéations
de n. Deux triangles sont dits G-ëguivalents s'il existe un élément de geG
transformant l'intérieur de T en l'intérieur de T', on écrit Tj-LT'.
P
oo
T X T ' entraîne (gg)(g
eG et g(T) = T')
Tout triangle T est G-ëquivalent à lui-même; en effet, en désignant par 1
l'application identique de n, on a:
o o
1„(T) . T
Les triangles dégénérés sont aussi tous G-équivalents entre eux,
l'inté-rieur de chacun des triangles étant vide (chap. I).
Nous disons plus généralement que deux_pglygones_P_et_P^_sont_G
=égui-p
yalents et on écrit PrOP' (ou simplement P-v/P' s'il n'y a pas d'ambiguïté
sur G) s'ils admettent des triangulations G-équivalentes, c'est-à-dire
des triangulations (T.) et (T'.) ayant même ensemble d ' i n d i c e s / ^ £ _ ^
l_i_n l _ _n / / R H I V E S>
et telles que les couples de triangles de même indice soient G-équivalenfs;. *
RCt7
EW
La notion de G-équivalence des polygones n'est utile que si elle estNSjsgfr^'
pendante de la façon d'appliquer le procédé, c'est-à-dire du choix d'une
tri-angulation particulière. A cette fin, les lemmes suivants sont à établir.
Lemme 2-1. - Deux triangulations d'un polygone P admettent toujours (au
moins) une triangulation constituant un raffinement commun de chacune
d'elles.
Démonstration - Soient deux triangulations (T.) et (T
1.) de P. Si
'
Jchaque triangle T. est contenu dans un triangle T'-, alors (T.) est un
I J I
raffinement commun de (T.) et (T'.). Sinon, ceux des ensembles T-QT'.
qui ne sont pas vides constituent une famille de polygones convexes d'au
plus six côtés. Il suffira d'introduire pour chacun des polygones
T^pjT'. non triangulaires et non vides
FIG. 2-1
les diagonales relatives à l'un des sommets de T.OT- pour former une
'. H J
triangulation plus fine que chacune des triangulations données.
C.Q.F.D.
Remarque - Deux triangulations de P admettent en général une infinité
de raffinements communs dont l'un sera le moins fin de tous; en d'autres
21
termes, les triangulations d'un polygone ordonnées par la relation "moins fin" forment un ensemble filtrant ; toutefois nous ne nous servirons pas de ce fait dans cette thèse.
Lemme 2-2. - Si deux polygones P et P' différent au plus par un poly-gone dégénéré, c'est-à-dire, de façon précise, si P - P' et P' - P sont soit vides, s o i t des polygones dégénérés, alors P, P', F M P ' sont G-équivalents.
Démonstration - Soient deux polygones P et P' remplissant les conditions du lemme. Il suffit de montrer que P«^ pflP'. Si P n P '
FIG. 2-2
est vide ou dégénéré le résultat du lemme suit aussitôt, puisque tous les polygones dégénérés sont G-équivalents entre eux (chap. I). Supposons P H P ' non dégénéré et considérons une triangulation (T.) de PflP'.
1 l<i<n
1. Pour plus de précisions sur ce terme, voir Bourbaki, N., Théorie des ensembles, livre I, Fascicule de résultats, Paris, Herman 1964,§6, No 8.
Soient un polygone dégénéré D contenant P - P', et une triangulation (T.) de DAP. Alors (T.) est une triangulation de P et on
n+l_i<m l<_i<jn
formera. une triangulation (T1-) de PPlP' G-équi val ente â la
prëcé-l<i<m dente en prenant T. pour i = 1,2, n T ' i {a} pour i = n+1, m ou ù a est un sommet de P T V ' . C.Q.F.D, Lemme 2-3. - Si deux polygones P et P' sont G-équivalents, alors i l existe des triangulations G-équi val entes (T.) et (T1.) plus fine?
(respec-J ô
tivement) que deux triangulations arbitraires données sur P et P'. Démonstration Soient deux polygones Géquivalents P et P'. On consi dère deux triangulations quelconques V de P et V de P'. D'après l'hy pothêse Pw,P', il existe des triangulations S = (S.) et S' ■ (S1,)
l_i_n l_i_n
de P et P' respectivement et une famille (g.) d'éléments de G telle que g A S . ) = S'., pour tout i = 1,2, n. D'autre part, V et S' admettent un raffinement commun U' (lemme 21) dont les triangles pourraient être transformés au moyen de la famille (gT ) en une famille de triangles constituant une triangulation U de P plus fine que S, mais non nécessai rement plus fine que V. Soit T un raffinement commun de V et U (donc aussi de S ) , les triangles de T seront transformés au moyen de la famille (g.) en triangles constituant une triangulation T' de P' plus fine que
1. Chaque triangle U' . de la triangulation U est contenu dans un cer tain S'.; alors à U'. correspondra dans P le triangle U, =. <f. (U').
23
V , S' et U'. Les triangulations équivalentes T et T' répondent alors
aux conditions du lemme*
C.Q.F.D.
Lemme 2-4. - La relation de G-équivalence dans 1'ensemble des polygones
du plan n est transitive.
Démonstration - Soient P, P' et P" des polygones du plan n tels que
P ^ P ' et P ' J P". D'après l'hypothèse P 3. P', il existe des
triangula-tions U = (U-) et U' . (U'O de P et P' respectivement, et une
l_i_n
nl_i<n
famille (u..) d'éléments de G telle que u.(U.) = U'., pour i s 1,2 n.
De même, il existe des triangulations V = (V,) et V" = (V".) de P
l<j_n
Jet P" respectivement, et une famille (v.) d'éléments de G telle que
j
v.(V.) = V"., pour j r 1,2 m.
J J J
Soit W' = (WV) un raffinement commun de U' et V ; on déduira de W'
une triangulation W de P au moyen des applications uT , et une
triangu-lation W" de P" au moyen des applications v. en triangles dont la famille
j
constituera la triangulation W, plus fine que U et G-équival ente à W'.
D'autre part, les triangles W' seront transformés au moyen de la famille
(v.) en triangles donnant lieu â la triangulation W" de P", plus fine
que V" et G-équivalente à W'. Les triangulations W et W" ont
naturelle-ment même ensemble d'indices. Par ailleurs, tout triangle W
kde W est
G-équivalent au triangle de même indice de W" puisque
Vjou- (W. ) - W". , où i et j sont des indices
tels que
W' | P
U ,i
e t W'Ç-
V' j '
Ce qui établit la transitivité de la G-équivalence dans ) .
Théorème 2-1. - La G-équivalence est une relation d'équivalence dans
l'ensemble _ des polygones.
Démonstration - Toute triangulation d'un polygone est G-équival ente à
elle-même:
P ^. P quel que soit Pe J , la G-équivalence est donc une relation
re-flexive.
Si pji P', alors il existe des triangulations (T^ et (TV) de P et
P' respectivement ayant même ensemble d'indices, et une famille (t.)
d'éléments de G telle que t.(T.) = T'..
1 g
D'où t. (T'j) -. T.., c'est-â-dire P' Jl P. Enfin, nous savons déjà
(lemme 2-4) que la G-équivalence est transitive.
C.Q.F.D.
Exemples de relations de G-ëquivalence
Si G » 7j^, <j/_i. est réduit à deux classes: la classe des polygones
dégénérés et celle des polygones non dégénérés (cela provient du fait que
& opère transitivement dans l'ensemble des triangles non dégénérés).
Si G est réduit â la transformation identique de n, c'est-â-dire
G a {I.,}, alors tout polygone n'est G-équi valent qu'à lui-même.
Si G Q ^ e s t le groupe des similitudes du plan, alors on dira que
3/G est l'ensemble des "formes polygonales".
25(a)
de la notion de G-équivalence. Cette notion pourrait permettre d'expli-citer plusieurs notions géométriques importantes; dans notre thèse, nous n'appliquons la G-équivalence qu'à la notion d'étendue.
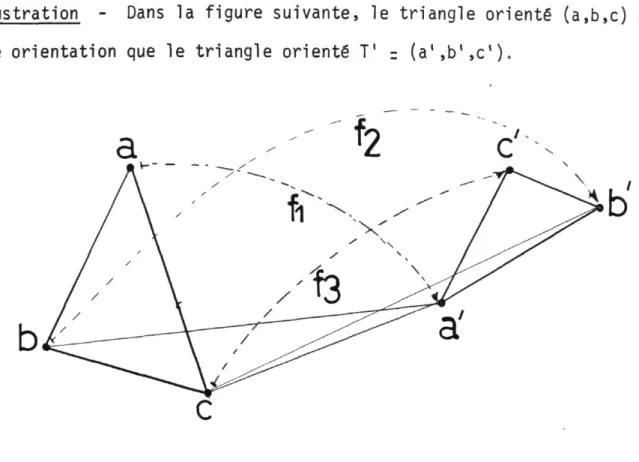
Théorème 2-2. - Soient deux triangles T et T'. Les propriétés suivantes sont équivalentes:
o o
(1) Il existe geG et g(T) = T', et
(2) T et T' admettent des triangulations G-équivalentes.
Démonstration - Si la propriété (1) est satisfaite, alors les trian-gulations (T.)
i = 1 et (T',) i = 1 sont G-équivalentes (par la définition de la page 19); il s'ensuit aussitôt que (1) = ^ ( 2 ) . Supposons ensuite que la propriété (2) soit satisfaite. L'induction sur le nombre n de triangles dans chaque triangulation réduit le problème au cas essentiel
où n r 2. -V
FIG. 2-3
Soient a,b,c et a',b',c' les sommets de T et T'; soient les points debc et d'eb'c' tels que les triangles T, (de sommets a,b,d) et T,-, (de sommets a,d,c) soient respectivement G-équivalents aux triangles T'-, (de sommets a',b',d') et T' (de sommets a',d',c'). Si d est conf-:..u avec b ou c, d' sera aussi confondu avec b' ou c', et trivialement (2)=£>( 1 )• Sinon,
les points b,d,c sont distincts et alignés, d étant entre b et c (peu im-porte la nomenclature des points, l'essentiel est qu'un des trois points
r r
sera situé entre les deux autres). Or, T, ,-^T', et T2 ^ T ' entraînent
l'existence de f,, f^eG tels que:
a i--> a' ^ b r - v b1 d H-Vd1 a h t a1 d r - > d ' C r—> C'
Donc f--(bd) = ITd-1" et f2(cd) = f2Cbd) = Fd7". Or, d'une part, f-^cJeFd"7"
(puisque f, est une colinéation), et b',d',f,(c) sont alignés dans cet ordre (les colinéations affines conservent l'intéralité et le rapport de division); d'autre part, f2(c) = c'eb'd' et b',d',fp(c) sont alignés dans
cet ordre (pour la même raison que tantôt). On en déduit que f-j (c) = f2(c).
Or, il n'y a qu'une colinéation affine et une seule qui transforme trois points non alignés a,d,c en trois points non alignés a',d',c' (ce résultat est établi dans plusieurs textes de géométrie projective, voir par exemple dans Projective Geometry, Veblen and Young, p. 72, theorem 1); donc, f-j = f2<
Alors a r-fc-a'
f}: < bh-yb'
c r->c' c'est-à-dire ^ ( T ) o T' 1 o
25(c)
ci'oQ (2)__>(1).
Dès lors (1)É=>(2).
C.Q.F.D.
Remarque - Le théorème 2-2 sera implicitement évoqué dans l'énoncé
et la motivation de l'additivité de l'aire (p.77).
LA G-EQUIVALENCE ET LA NOTION D'ETENDUE
1. SYMETRIE OBLIQUE
Définition 3-1. - Soient une droite AefD et une direction ae_) dis-tincte de la direction de A. On appelle symétrie oblique d'axe A sui-vant la direction a, l'application
A : n - * > n
a
qui, â tout xeH, associe le point yen tel que le segment [x,y] soit con-tenu dans une droite de direction a et a i t son milieu sur l'axe A.
1. Pour faire bref, nous dirons symétries pour désigner les symé-tries de ce type.
27
A(u)
U
•A&O
FIG. 3-1
L'ensemble de toutes les symétries du type précédent sera noté ?:
3 = {A |Ae_), aelDet a-£ dir. A}
Les éléments de % sont des involutions, c'est-à-dire que pour tout A e% on a:
a
A = A" , ou encore A o A = 1_ a a a a n Les points de A sont les seuls points fixes de A
pour tout aen, A (a) = a<f->aeA.
Une symétri^orthogonale n'est qu'une symétrie particulière Aa pour
Comme pour toute application définie sur n, on peut définir
l'exten-sion d'une symétrie â l'ensemble des parties du plan; si A e?, cette
ex-tension n'est autre que l'application qui, à toute partie X de n, associe
1'image de X par A :
A_(X) = {A
o(x)|xeX}
JkAJ.X)
FIG. 3-2
En particulier A (A) = A.
Nous allons maintenant introduire un groupe G en termes de symétries;
ce groupe devra "conserver les étendues" une fois cette notion introduite.
29
Définition 3-2. - Soit G le sous-groupe de _> engendré par %\ on appelle étendue toute classe d'équivalence déterminée dans <T par la relation de équivalence. Il reviendra donc au même de dire que deux polygones sont G-équivalents ou qu'ils ont même étendue. On désignera l'ensemble de toutes les étendues par zT/G.
Désormais, la lettre G sera réservée au sous-groupe de _> engendré par 2. On sait que tout élément de G est un composé de suite finie de symétries: / \
G - U 3( n )
n>o
où 3 désigne l'ensemble des composés de n termes de 2, c'est-à-dire £o£o o?.
Remarques
-1. Les isométries étant les composées des suites finies de symétries orthogonales (voir, par exemple, Papy, Georges, Mathématiques Modernes 3) l'ensemble D de toutes les isométries du plan forme un sous-groupe de G: _ C G.
2. La composé*de deux symétries d'axes parallèles suivant la même direction est une translation; la réciproque est aussi vraie. 3. Une symétrie centrale par rapport à un point oeil résulte de la
composition de deux symétries dont les axes comprennent o et telles que l'axe de chacune soit dans la direction de l'autre
2 symétrie; deux telles symétries sont dites conjuguées .
1. G est le plus petit sous-groupe de fe contenant %. On dit encore parfois que % est un ensemble de générateurs de G.
2. Pour plus de détails sur les symétries conjuguées, consulter Cho-quet, G., L'enseignement de la géométrie, Paris, Herman, 1964, p. 52.
Deux polygones symétriques ont en commun des caractères suffisamment importants pour qu'ils aient été déclarés de même étendue. La figure suivante
FIG. 3-3
illustre le fait que, si deux polygones sont symétriques, alors il existe des triangulations équivalentes pour lesquelles les divers couples de triangles de mêmes indices seront de bases et hauteurs égales.
3. ORBITE D'UN TRIANGLE
31
n'est autre que l'ensemble
G(T) = {g(T)|geG}
des transformés de T; cet ensemble constitue l'orbite du triangle T. Voici pour i l l u s t r e r quelques éléments de l'orbite d'un triangle T:
FIG. 3-4
Essentiellement, deux polygones sont G-équivalents dès qu'une tri-angulation de l'un se déduit d'une tritri-angulation de l'autre en y rempla-çant chacun des triangles (indépendamment les uns des autres) par un triangle de même orbite.
COMPOSES SPECIAUX DE SYMETRIES OBLIQUES
1. TRANSVECTIONS
Définition 4-1. - On appelle transection, tout composé de couple de
symétries d'axe commun. L'ensemble de toutes les transvections d'axe
Aeî) sera noté ffo^.
fa. z {A.oA IA , A
0e?} ou encore
M p oi ce P
^
A= ?
Ao?
A, où ?
Adésigne l'ensemble
des symétries d'axe A.
Il s'ensuit aussitôt que les points de A sont invariants car nous
avons déjà noté que
A (a) = a *=-> aeA.
a
Remarques
-1. L'application identique 1 est une transvection; cela provient du f a i t que les éléments de 2 sont des involutions. En e f f e t ,
33
2. Une transvection (sauf 1 ) admet un seul axe.
Voici une transvection d'axe A. t » A oA
;; 6 a
m
u
FIG. 4-1
Nous voulons établir le fait important que l'ensemble ? P
Aest un
sous-groupe de G; mais établissons d'abord ces résultats préliminaires.
Lemme 4-1. - Si t désigne une transvection d'axe A distincte de
l'iden-tité 1 , alors tout point xen-A détermine avec son image z = t(x), le
segment (x,z_ de direction A; aussi t laisse chacune des droites de
direc-tion A invariante .
1. Il ne s'agit pas ici de l'invariance par points, mais plutôt d'une
permutation des points de la droite. L'axe A est la seule droite
invariante par points.
Démonstration - Soit t =• AfloA une transvection d'axe A, distincte de P Ot 1 ; soit xen-A.
0Q
P *
FIG. 4-2 Posons: y = A (x) «r a Z = t(x) = A oA (x) P etL'axe A contient les milieux des côtés [x,y_ et [y,z] du triangle de sommets x,y,z.
De ce f a i t , on conclut que A|| f x , z ] . I l s'ensuit aussitôt que si BedJ et si x,yeB, x ^ y e t B|fA,
alors [ x , t ( x ) ] | | A , fyt(^)]||A et t ( x ) ^ t ( y ) Ce qui entraîne t(x), t(y)eB
donc t(B) 3 B; ainsi les droites parallèles à A sont laissées invariantes
par t.
35
Lemme 4-2. - Le composé de trois symétries d'axe commun est une symétrie de même axe.
Démonstration - Voici trois symétries A , A0, A d'axe commun A, et soit
ot P Y
xen-A (le cas de xeA est t r i v i a l )
X* «z
I I I \A
v iA o © ©
J p Oiy* ^ u
NsX FIG. 4-3 Posons: y = A (x) a z = A6(y) = AeoAa(x) u = A (z) = A oA.(y) = A oA.oA (x) Y Y 3 Y 3 aNous devons prouver que, quel que soit xen, les segments [x,u] ( i ) admettent une direction commune
( i i ) ont leur milieu sur A. En e f f e t , de ce qui précède, on peut écrire:
Or, d'après le lemme 4-1, _/,u] ||A ; d'autre part, la droite A contient déjà le milieu du côté [x,yj du triangle x,y,u; donc le milieu de jx,y] apnOartient â A. Ainsi x et u déterminent la direction 6 pour laquelle
u z A J x ) ; il s'ensuit que A. = A oA0oA . 6X n 6 Y 3 ot
Montrons enfin, que la direction 6 ainsi obtenue est indépendante du choix de x. Soit x'en-A un point distinct de x, et soit u' l'image de x' par A oA oA ; on sait, par ce qui précède que [x',u_ a son milieu sur A. En désignant par 6' la direction de x'u', il est clair que
V
=\°v_-Or, A6 -_ AYoAeAQ = Afil
donc 6 et 6' désignent la même direction, ce qui établit le lemme: SAoSAoSA - SA
C.Q.F.D. Théorème 4-1. - L'ensemble ( p . est un sous-groupe de G.
Démonstration - L'ensemble des composés de transvections est stable; en effet,
^ 5Ao * CA = (?Ao2A)o(2Ao2A) (définition d e/SA)
r 2flo(2Ao2,o2fl) (associativité de la
37
= ?
Ao2
A(lemme 4-2)
donc
w Ao ^
AQ ^
ANous avons déjà noté que l'application identique l
nest une transvection.
D'autre part, les ?
Aétant des involutions, il s'ensuit que:
en d'autres termes _ Â C ^ A
;par conséquent, S - est un sous-groupe de G.
C.Q.F.D.
2. DETERMINATION D'UNE TRANSVECTION
Dans la définition 3-1 d'une transvection, nous avons fait intervenir
deux directions ot,3e_)et un axe Ae£-. Cependant, nous faisons
remar-quer qu'une infinité de couples (a,3) distincts les uns des autres,
peu-vent donner lieu à la même transvection. Par exemple, en se référant à
la figure suivante
FIG. 4-4
les couples (a,3), (a1,3'), (a",3") déterminent la même transvection t
d'axe A, qui applique le point x sur le point y. Les couples de direc-tions ne caractérisent donc pas une transvection.
Proposition 4-1. - Une transvection t est déterminée par la donnée de l'axe et d'un couple (a,t(a)) où le point a n'appartient pas à l'axe. Démonstration - Il s'agit de déterminer où irait un point quelconque xen. Deux cas sont à distinguer, selon que x£at(a) ou xeat(a).
Cas 1 : Si x n'appartient pas à la droite at(a), alors Ix" coupe A en un point 0 et 0 est un point invariant de la transvection d'axe A. D'autre part, puisque t est une colinéation, l'image de ÔT est la droite ot(a); donc, t(x)eot(a); par ailleurs, t(x) appartient à la parallèle à A menée de x (lemme 4-1). Cette parallèle unique détermine avec la droite uni-que ot(a), 1'uniuni-que point t(x).
39
**tO<)
FIG. 4-5
Cas 2: Si x appartient à la droite at(a), il suffira de prendre un point
auxiliaire y^at(a) puis de construire t(y) comme décrit au cas 1. La
droite xy coupe l'axe A au point b, on sait que ce point est invariant;
ainsi la droite xy se transforme en bt(y)
t(a) m
' A
FIG. 4-6
âtTâT et btlyT.
C.Q.F.D.
On peut ainsi construire de proche en proche une suite de transformés
successifs d'un polygone P par une transvection t définie par l'axe A et
un couple (a,t(a)), a$A.
Voici à titre d'exemple, une séquence de polygones obtenus les uns
des autres par une transvection t définie par l'axe A et un
couple (a,t(a))
FIG. 4-7
Tous ces polygones sont naturellement de même étendue.
3. APPLICATIONS DIDACTIQUES
(a) "Golf géométrique"
41
Le jeu de "golf géométrique" vise à comparer les étendues de deux triangles donnés, au moyen des transformations permises; ces dernières étant basées sur deux propositions qu'il faut d'abord établir.
Proposition 4-2. - Un triangle T étant donné, on peut glisser un de ses sommets parallèlement au côté opposé, sans changer son étendue. Démonstration - Soit un triangle T de sommets a,b,c.
FIG. 4-8
Si T est dégénéré, la proposition suit trivialement. Soit un triangle T' obtenu en glissant le sommet a parallèlement à be. Or, d'après la proposition 4-1, bc et le couple (a,a') déterminent une transvection t
t: <
a t-*- a1
b — v b c —* c
qui transforme T en T': t(T) » T' et a fortiori o o
t(T) r T', teG
Cependant, t n'est pas le seul élément de G transformant T en T'; en voici un autre: Considérons a comme la direction du côté opposé [b,c]; Taxe A étant déterminé par les milieux de [a,a'] et [b,c]. Posons u = A e?, donc ueG; a
alors puis d'où à nouveau à r-> a1 u: \ b i-* c O 0 u(T) = T'
T3.T'
C.Q.F.D.Les triangles déduits progressivement les uns des autres au moyen des transformations du type précédent constituent une orbite complète. Voici construite de cette manière, une partie de l'orbite de T: Chaque flèche pointillée indique le sommet glissé parallèlement au côté opposé du triangle considéré; f-, ,f2 ..
par la proposition 4-2.
43
T' = f6of5of4of3of2of1(T), f.eG, i = 1,2, . . . . 6.
FIG. 4-10
Proposition 4-3. - Un triangle T étant donné, on peut glisser un de ses côtés sur son support, sans changer son étendue.
Démonstration - Soit un triangle T de sommets a,b,c et T' un triangle obtenu de T en glissant [b,c_ sur son support; les sommets de T' sont a.b'.c'.
1. Le glissement d'un segment de droite sur son support est une trans-formation isométrique qui associe â tout segment [b,c] la famille de segments [b',c'J de même support que [b,c], tel que les vecteurs bl? et D e * soient égaux.
o o
Ici encore, on pourra trouver teG, tel que t(T) = T'. En effet, soit A la droite contenant a et parallèle à _>,c]. L'axe A et le couple (b,b') déterminent la transvection teG pour laquelle
donc a •—hâ t : < b r-rvb' o o t(T) = T1 d'où
T£T'.
En reprenant la figure précédente, la symétrie A' aussi assure
l'équiva-P
lence T ^ T1: On désigne par A' (en traits gras) la droite contenant
a et le milieu de [b,c'J, et par a la direction de [b,c]; A'eG et a i->a
A' : < b i-^c' ex
C !-r>b'
C.Q.F.D.
On peut établir que l'orbite entière d'un triangle peut s'obtenir de proche en proche au moyen des transformations du type précédent .
1. Bien entendu le cas de triangles dégénérés supposerait qu'on explicite alors la signification de certains termes.
45
(a) Le golf géométrique
Comme nous l'avons signalé plus haut, ce jeu amusant que le professeur Lemay a convenu d'appeler "golf géométrique" vise à comparer deux étendues triangulaires données. Nous distinguons deux espèces de golf géométrique : le golf des sommets et le golf des côtés.
Le golf des sommets consiste à transformer un triangle au moyen des transformations du type décrit dans la proposition 4-2; d'où la première règle du jeu:
Règle 1. - On pourra glisser un sommet d'un triangle parallèlement au côté oppo-sé'a sans changer l'étendue de oe triangle.
Le golf des côtés consiste à transformer un triangle au moyen des transformations du type décrit dans la proposition 4-3; d'où la deuxième règle du jeu:
Règle 2. - On pourra glisser un coté d'un triangle sur son support^ sans changer
l'étendue de ce triangle.
Etant donnés deux triangles G-équivalents, le golf géométrique nous permet d'atteindre un des triangles à partir de l'autre. Voici pour illustrer, une séquence de triangles conduisant de T à T', au moyen du golf des côtés:
FIG. 4-12
De plus, si deux triangles sont arbitrairement donnés, le golf géo-métrique permet aussi de "comparer" leurs étendues, c'est-à-dire d'arriver â placer un des triangles â l'intérieur de l'autre.
"La tradition scolaire nous^ a habitués à traiter les questions d'é-tendue par "transport de pièces rigides" donc par isométries. Or le groupe G contient en outre des transformations non isométriques qui aug-mentent d'autant plus notre pouvoir d'action sur les figures géométriques; ce fait présente par conséquent un avantage didactique certain. 1„
47
(b) Représentation d'une étendue par un triangle de côté imposé
1 Théorème 4-2. - G opère transitivement dans l'ensemble des segments de n.
Démonstration - Nous allons montrer que, pour tout couple de segments s,s', il existe un élément geG qui applique s sur s', c'est-à-dire g(s) = s'.
Posons £a,b_ = s et [a1 ,b_ - s'
FIG. 4-13
Il suffira d'appliquer a sur a' par une symétrie A dont Taxe contien-drait le milieu de Ja,a'_ et dont la direction serait choisie de manière que b = A (b) n'aille pas sur la droite a'b'.
Ensuite on prendrait T a x e B contenant a' et le milieu de [b ,b_ puis pour B la direction de ]>0,b_; la symétrie B appliquerait alors
Ja'.bJ sur [a',b_:
a' »->• a'
Alors le composé B oA = geG appliquerait s sur s'.
C.Q.F.D. Remarque - Si s et s' ont même support, on inclinera d'abord le sup-port de s par rapsup-port à celui de s', au moyen d'une symétrie dont Taxe ne devrait pas être parallèle au support commun; de là, on enchaînera comme décrit plus haut.
Dès lors, nous pouvons forcer les polygones transformés par G, à vérifier certaines conditions. Une telle condition est résumée dans le corollaire suivant du théorème 4-2.
Corollaire - Tout triangle (non dégénéré) peut être transformé en un triangle G-équivalent de manière â ce que l'un de ses côtés arbitrairement choisi se transforme en un segment prédéterminé (non réduit à un point).
1. Une construction différente est proposée par Wilson, E.B., A generalized conception of area, Annals of Mathematics, vol. V, 1903, p. 36.
49
Démonstration - En effet, soient un triangle T de sommets a,b,c et un segment prédéterminé s1 - _-',->']. Soit un côté s _ £a,b_ de T. D'après
le théorème direct, il existe un élément geG tel que g(s) = s' = [a'.b'J en posant que g(c) = c', alors le triangle T' de sommets a',b',c' est le transformé de T par g, donc
T G T ,
Théorème 4-3. - Tout polygone est G-équivalent à un triangle.
Démonstration - Pour un polygone P d'un seul tenant et sans trou, nous allons montrer comment on peut construire une triangulation qui réduise
le nombre de côtés d'un; de là, suivra la possibilité de réduire tout polygone à un triangle G-équivalent au moyen d'un nombre fini de cons-tructions du type qu'on va décrire. Il suffit de considérer la position de trois côtés consécutifs et montrer comment la réduction d'un côté se fait.
Si P est convexe et renferme plus de trois côtés, alors trois côtés consécutifs [a,b], [b,c], [c,d] de P auront la position suivante (traits
o gras) par rapport à P.
Menons de b, la parallèle à _a,c_; cette parallèle coupe c d au point x. Les triangles de sommets a,b,c et a,x,c sont G-équivalents (golf des sommets). Dans une triangulation qui contient le triangle de sommets a,b,c, on remplacera le triangle de sommets a,b,c par un triangle G-équivalent de sommets a,x,c; cette substitution conduit à remplacer trois côtés con-sécutifs par deux: [a,x] et [x,d].
Si P n'est pas convexe, alors on pourra trouver trois côtés consé-cutifs [ a , b ] , [ b , ç ] , [c.d] disposés comme suit (traits gras)
FIG. 4-15
Tracer £a,c_, puis mener de b la parallèle à [a,c], cette parallèle peut (ou non) couper cd" en un point x, selon que [a,c_ et [c,d_ n'ont pas le même support (ou ont le même support).
- Si [c,d] et [a,cj n'ont pas le même support (Fig. 4-15), les triangles de sommets a,b,c et a,x,c sont G-équivalents (golf des sommets). Ici encore, trois côtés consécutifs seront rem-placés par deux, [a,x] et £x,dj.