Concevoir des interfaces tangibles et spatiales pour les déficients visuels : pourquoi et comment ?
13
0
0
Texte intégral
Figure
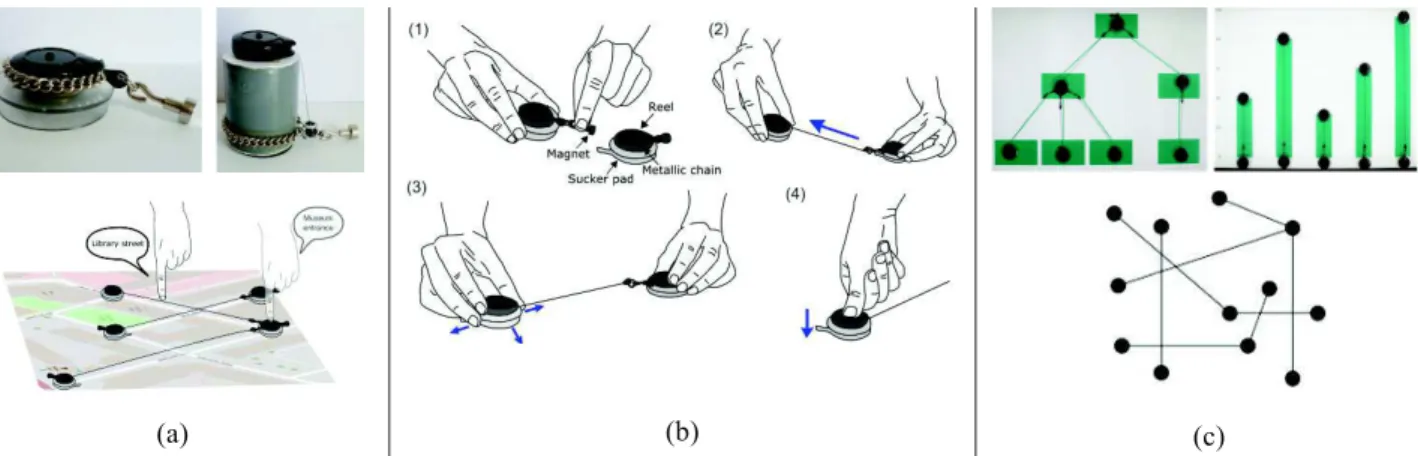
![Figure 3. (a) Illustration du système Clutching At Straws qui permet de rendre tangible des fonctions linéaires [22]](https://thumb-eu.123doks.com/thumbv2/123doknet/3117659.88566/6.892.105.818.148.324/figure-illustration-système-clutching-straws-tangible-fonctions-linéaires.webp)
Documents relatifs