Pour l'obtention du grade de
DOCTEUR DE L'UNIVERSITÉ DE POITIERS UFR des sciences fondamentales et appliquées
Pôle poitevin de recherche pour l'ingénieur en mécanique, matériaux et énergétique - PPRIMME (Poitiers)
(Diplôme National - Arrêté du 7 août 2006)
École doctorale : Sciences et ingénierie en matériaux, mécanique, énergétique et aéronautique -SIMMEA (Poitiers)
Secteur de recherche : Génie électrique et mécanique des milieux fluides
Présentée par :
Zelu Yan
Étude des panaches électrohydrodynamiques plans Directeur(s) de Thèse :
Christophe Louste, Hubert Romat Soutenue le 18 septembre 2014 devant le jury
Jury :
Président Jean-Luc Aider Directeur de recherche CNRS, ESPCI de Paris Rapporteur Jean-Luc Reboud Professeur des Universités, Université de Grenoble 1 Rapporteur Pedro Vazquez Profesor, Universidad de Sevilla, España
Membre Christophe Louste Maître de conférences, Université de Poitiers Membre Hubert Romat Professeur des Universités, Université de Poitiers Membre Philippe Traoré Maître de conférences, Université de Poitiers
Membre Laurent Berquez Professeur des Universités, Université Paul Sabatier de Toulouse
Pour citer cette thèse :
Zelu Yan. Étude des panaches électrohydrodynamiques plans [En ligne]. Thèse Génie électrique et mécanique des milieux fluides. Poitiers : Université de Poitiers, 2014. Disponible sur Internet <http://theses.univ-poitiers.fr>
pour l’obtention du Grade de
DOCTEUR DE L’UNIVERSITE DE POITIERS (Faculté des Sciences Fondamentales et Appliquées)
(Diplôme National - Arrêté du 7 août 2006)
Ecole Doctorale : Sciences et Ingénierie en Matériaux, Mécanique, Energétique et Aéronautique - SIMMEA
Secteur de Recherche : Génie Electrique et Mécanique des Milieux Fluides
Présentée par :
Zelu YAN
************************
ÉTUDE DES PANACHES ÉLECTROHYDRODYNAMIQUES PLANS
************************
Directeur(s) de Thèse :
Christophe LOUSTE, Hubert ROMAT
************************
Soutenue le 18 Septembre 2014 devant la Commission d’Examen
************************
JURY
Jean-Luc REBOUD Professeur, G2Elab, Université de Grenoble Rapporteur
Pedro VAZQUEZ MCF-HDR, Université de Séville Rapporteur
Jean-Luc AIDER Directeur de recherche CNRS, PMMH, ESPCI Examinateur Laurent BERQUEZ Professeur Université de Toulouse LAPLACE Examinateur Hubert ROMAT Professeur, Université de Poitiers Examinateur
Philippe TRAORE MCF-HDR, Université de Poitiers Examinateur
"All our dreams can come true - if we have the courage to pursue them."
Je souhaite adresser mes sincères remerciements à toutes les personnes qui ont contribué par leur soutien et leurs conseils à la réalisation de ma thèse.
En premier lieu, je tiens à remercier sincèrement M. Christophe Louste qui, en tant que directeurs de thèse, a dirigé et suivit cette thèse avec attention. Il a consacré beaucoup de temps à ce travail. Je tiens à le remercier particulièrement pour : son écoute et sa grande disponibilité, pour le temps consacré à partager son expérience et ses conseils qui m’ont considérablement aidés dans la rédaction de cette thèse et sans qui ce mémoire n’aurait jamais été s’achevé.
Je remercie particulièrement M. Hubert Romat, Codirecteurs de cette thèse, pour m’avoir accueilli très chaleureusement comme doctorant dans équipe EFD, pour son soutien tout au long de ce travail de recherche et pour son rôle de guide dans les méandres des démarches administratives.
J’aimerais aussi remercier M.Thierry Paillat et M. Philippe Traoré, qui m’ont apporté leur aide très souvent et qui ont contribué à la relecture de mes articles et publications tout au long de ces années d’études. Je tiens à adresser un grand merci à tous les autres membres du le groupe Electrofluidodynamique : M. Eric Moreau, M. Noureddine Zouzou, M. Nicolas Benard, M. Gérard Morin, pour la richesse et la qualité de leur enseignement et leur investissement pédagogique dans la formation de master en génie électrique et mécanique de fluides.
Un grande merci à mes collègues de bureau, Antoine et Patricia, qui m’ont toujours encouragé au cours de ces années. Je remercie également Wu Jian, Arthur, Clément pour les discussions intéressantes, pour leurs conseils scientifiques, et leurs aides.
J’aimerais aussi particulièrement remercier M. Christian Refin, Romain Bellanger, Ivan Jolit, et Ludovic Mascarenhas, pour leur patience et leur aide précieuse dans la préparation et les réalisations des manips. Je n’oublie pas Mme Catherine Ecale pour son aide administrative indispensable. Mes remerciements iront également à toutes les personnes administratives et techniques du laboratoire, merci pour votre aide précieuse pendent ces années d’études.
Merci également à l’ensemble des membres du jury qui m’ont fait l’honneur de participer à ma soutenance de thèse et de partager leurs connaissances. Veuillez trouver ici, l’expression de ma sincère reconnaissance. Merci également de m’avoir assisté par vos nombreux commentaires et conseils.
Enfin, je joins à ces remerciements tous les amis rencontrés en France. Merci pour tous les très bons moments partagés ensemble qui m’ont rendu la vie en France très agréable : Steve, Jiang Zhiwei, Hu Hui, Liu Guiyu, Sun Yang, Li Li, Zhou Zhiyong, Yu Yanying, Liu Weiming, Zong Huliang, Wan bin, Fan Yu, Jiang Chennan, Tian
Yuzhen, Wang Cheng’an, Yi Zhibin, Cheng Peng, Zhou Wei, Wang Yun, Liu Qinxin,
Yu Wenbo, Li Zhipeng, Fu Shuoyun, Dong Yang, Wu Hanxiang, Wang Xuan, Zhang Mengqi, Zhang Chuanxin et tous ceux que j’oublie, merci à vous tous.
Je dédie cette thèse
A mes très chers parents, Yan Zhijiang et Ma Li.
Pour m’avoir soutenu aussi bien financièrement que moralement tout au long de mes
études ne France depuis 2008, pour m’avoir toujours fait confiance, pour leur soutien et leur écoute.
Table des matières
Résumé ... 1
Nomenclature ... 3
Plan du mémoire ... 7
Chapitre I. Introduction ... 9
1.1. Présentation du jet classique ... 9
1.1.1. Définition du Nombre de Reynolds du jet ... 9
1.1.2. Jet libre ... 11
1.1.2.1. Structure du jet libre ... 11
1.1.2.2. Propriétés caractéristiques du jet libre ... 12
1.1.2.2.1. Évolution de la vitesse centrale ... 13
1.1.2.2.2. Évolution de la forme des profils de vitesse ... 16
1.1.2.2.3. Évolution de la demi-largeur du jet ... 17
1.1.2.2.4. Intensité turbulente de la vitesse ... 18
1.1.3. Le jet de paroi classique ... 19
1.1.3.1. Structure du jet de paroi ... 21
1.1.3.2. Propriétés caractéristiques du jet de paroi ... 22
1.1.3.2.1.Évolution de la vitesse centrale ... 22
1.1.3.2.2. Évolution de la forme des profils de vitesse ... 23
1.1.3.2.3. Évolution de la demi-largeur ... 23
1.1.4. Jet impactant classique ... 24
1.2. Panache ... 26
1.2.1. Définition du panache ... 26
1.2.2. La classification des panaches purs ... 27
1.2.3. Montage expérimental ... 27
1.2.4. Caractéristique du panache thermique ... 28
1.2.4.1. Structure du panache thermique ... 29
1.2.4.2. Évolution de la vitesse axiale moyenne ... 30
1.2.4.3. Variations du profil ... 31
1.2.4.4.. Évolution de la largeur du panache ... 32
1.2.4.5. Évolution de l’intensité turbulente axiale ... 32
1.3. Description générale du phénomène EHD... 34
1.3.2. Mécanismes de création de charges ... 34
1.3.2.1. Dissociation recombinaison renforcée par effet de champ ... 36
1.3.2.2. Injection de charge ... 37
1.3.3. Electronvection dans les liquides ... 38
1.3.4. Comportement théorique des panaches EHD ... 39
1.3.4.1. Longueurs caractéristiques ... 41
1.3.4.2. Densité de courant électrique ... 41
1.3.4.3. Régime laminaire ... 42
1.3.4.4. Régime turbulent ... 45
1.4. Conclusion ... 48
Chapitre II. Panaches EHD ... 51
2.1. Dispositif expérimental... 51
2.1.1. Un mot sur la méthode PIV ... 51
2.1.2. Le choix de la configuration lame/plan ... 52
2.1.3. Description du montage expérimental ... 53
2.2. Étude globale du jet EHD impactant ... 55
2.2.1. Qualification du dispositif ... 55
2.2.2. Analyse critique de la qualité mesures ... 56
2.2.2.1. Nombre d’images non corrélées ... 57
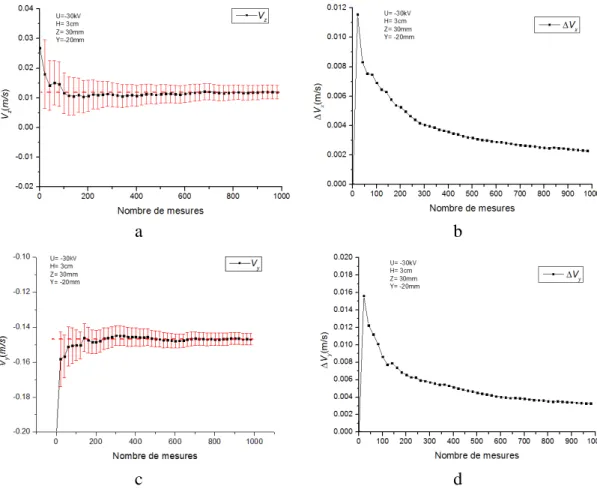
2.2.2.2. Convergence de la moyenne ... 60
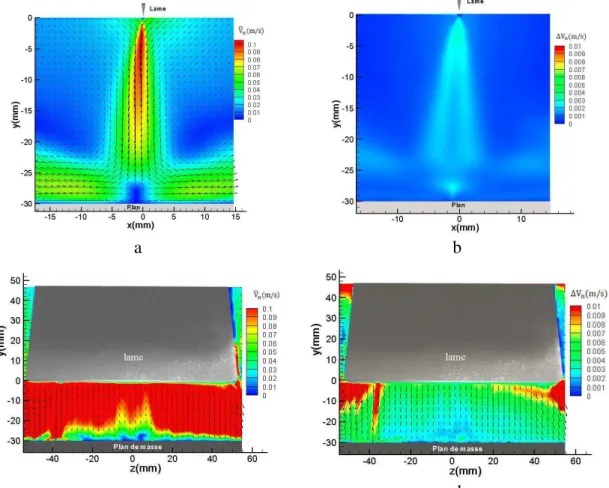
2.2.2.3. Analyse statistique des champs de vitesse ... 69
2.2.2.3.1. Vitesse moyenne ... 69
2.2.2.3.2. Champs fluctuants ... 71
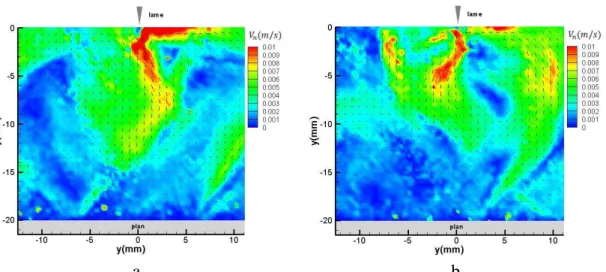
2.3. Structure du panache EHD ... 72
2.3.1. Évolution de la vitesse axiale ... 73
2.3.2. Évolution de la forme des profils de vitesse ... 75
2.3.3. Évolution de la demi-largeur ... 77
2.3.4. Évolution de l’intensité turbulente ... 78
2.4. Analyse en champs moyens ... 79
2.4.1. Les panaches ... 80
2.4.2. Les jets impactant ... 85
2.5. Étude paramétrique de la structure du panache ... 86
2.5.1. Caractérisation des panaches ... 86
2.5.1.2. Évolution de la demi-largeur ... 92 2.5.1.3. Intensité turbulente ... 94 2.5.2. Adimensionnement du comportement ... 97 2.5.2.1. Cas 1 : =-1000kV/m ... 101 2.5.2.2. Cas 2 : =-833kV/m ... 103 2.5.2.3. Cas 3 : =-1333kV/m ... 105 2.6. Conclusion ... 107
2.6.1. Les quatre zones caractéristiques du panache EHD... 107
2.6.2. Bilan de caractéristique ... 109
Chapitre III. Étude de la force ... 110
3.1. Les forces en mécaniques des fluides ... 110
3.2. Mesure des forces ... 111
3.2.1. Présentation ... 111
3.2.1.1. Mesure des forces de contact ... 112
3.2.1.2. Mesure des forces de champ ... 112
3.2.2. Méthodologies directes et indirectes... 112
3.2.2.1. Méthodes directes ... 113
3.2.2.2. Méthodes indirectes ... 116
3.2.2.2.1. Méthodes intégrales ... 116
3.2.2.2.2. Les méthodes différentielles ... 119
3.2.3. Méthode de simulation numérique ... 122
3.3. Méthode intégrale appliquée au cas lame/plan ... 122
3.3.1. Démarche ... 122
3.3.2. Volume de contrôle ... 133
3.3.3. Calcul du terme de pression ... 135
3.3.3.1. Choix du point de départ ... 141
3.3.4. Analyse un cas de = -35kV, =3cm ... 143
3.3.4.1. Vérification de l’hypothèse initiale ... 143
3.3.4.2. Détection des zones de force volumique par volume glissant ... 147
3.3.5. Influence du potentiel appliqué et de distance inter-électrode sur la force moyenne ... 148
3.4. Méthode RANS ... 149
3.4.1. Introduction ... 149
3.4.2. Résultats de la méthode ... 151
3.4.3.1. Terme instantané... 154
3.4.3.2. Terme visqueux et terme pression ... 154
3.4.3.3. Terme convectif ... 154
3.5. Estimation de la force par modèle théorique simplifié ... 159
3.5.1. Bord de panache et la vitesse moyenne ... 160
3.5.2. Approximation polynomiale ... 163
3.5.2.1. Pour une largeur de jet 2 ... 164
3.5.2.2. Pour une largeur de jet 2 ... 166
3.5.3. Approximation par fonction puissance ... 168
3.5.4. Résultat ... 170
3.6. Conclusion ... 172
Chapitre IV. Jets de paroi générés par l’actionneur à barrière diélectrique ... 174
4.1. Introduction en générale sur l’actionneur à barrière diélectrique ... 174
4.2. Jets de paroi générés par l’actionneur à barrière diélectrique dans gasoil ... 176
4.2.1. Montages expérimentaux ... 176
4.2.2. Principaux résultats sur les champs de vitesse dans le gasoil ... 177
4.2.2.1. Comparaison des profils de vitesse ... 178
4.2.2.2. Influence des paramètres ... 180
4.3. Jets de paroi générés par l’actionneur à barrière diélectrique dans du silicone ... 180
4.3.1. Caractéristique de l’huile de silicone ... 181
4.3.2. Dispositif expérimental ... 182
4.3.3. Analyse du comportement sous signal continu ... 183
4.3.3.1. Polarité positive ... 184
4.3.3.2. Polarité négative ... 187
4.3.3.3. Discussion... 189
4.3.3.4. Remarque sur la double couche ... 190
4.3.4. Jets de paroi EHD produits par le signal alternatif ... 191
4.3.4.1. Étude du comportement pour un signal carré =30kV, =0,2Hz ... 192
4.3.4.2. Influence de l’amplitude du signal... 194
4.3.4.3. Influence du rapport cyclique du signal ... 195
4.3.4.4. Influence de la fréquence du signal ... 196
4.3.4.5. Influence de la forme du signal ... 196
4.4. Estimation de la force produite par l’actionneur à barrière diélectrique ... 197
4.4.2. Force produite par l’actionneur dans le gasoil ... 199
4.4.2.1. Influence des paramètres ... 199
4.4.2.2. Variation temporelle de la force ... 200
4.4.3. Force produite par l’actionneur dans l’huile de silicone ... 201
4.4.3.1. Influence du potentiel ... 203
4.4.3.2. Influence du rapport cyclique du signal ... 204
4.4.3.2. Influence de la fréquence ... 205
4.4.3.3. Influence de la forme du signal ... 205
4.5. Conclusion ... 207
Conclusion générale et perspectives ... 209
Annexe ... 213
Annexe Chapitre II ... 213
2.1. Incertitude des champs de vitesse présentés la partie 2.41 ... 213
2.1.1. =1cm ... 213
2.1.2. =2cm ... 214
2.1.3. =3cm ... 215
2.1.4. =4cm ... 216
2.2. Bi-dimensionnalité de l’écoulement ... 217
2.2.1. Intégrale de la divergence d'un champ ... 217
Annexe Chapitre III ... 220
3.1. Bibliographie de la méthode indirecte ... 220
3.1.1. Les méthodes intégrales ... 221
3.2. Calcul de thermes de pression ... 223
3.3. Évolution de la force électrique en fonction du volume de contrôle ... 230
3.3.1. =1cm ... 230
3.3.2. =2cm ... 231
3.3.3. =3cm ... 232
3.3.4. =4cm ... 233
3.4. RANS équation en déduire de N-S ... 234
3.5. Cas d’étude de terme termes convectifs pour les deux méthodes, =-10kV, =3cm ... 236
Annexe Chapitre IV ... 238
4.1. Champs de vitesse pour un pulse positif avec un rapport cyclique 50% ... 238
4.2. Champs de vitesse pour un pulse négatif avec un rapport cyclique 50% ... 239
4.4. Champs de vitesse pour un signal en dents de scie 2 ... 241
4.5. Champs de vitesse pour un triangle avec un rapport cyclique 50% ... 242
4.6. Champs de vitesse pour un carré avec un rapport cyclique 20%. ... 243
4.7. Champs de vitesse pour un carré avec un rapport cyclique 80% ... 244
1
Résumé
Ce travail est une analyse de la structure des panaches Électrohydrodynamiques plans également appelés jets Électrohydrodynamiques en géométrie plane. Il a pour objectif de proposer une description la plus précise possible de l’écoulement, d’apporter une
meilleure compréhension des phénomènes physiques notamment à l’aide de modèles
simples et de quantifier la force électrique. Le chapitre I est une étude bibliographique qui propose un résumé des principales connaissances sur la structure de deux écoulements très similaires aux jets EHD : les jets classiques et les panaches thermiques. Le chapitre II est consacré à la présentation du montage expérimental, ainsi qu’à la méthodologie expérimentale utilisée dans cette étude. La qualité des mesures obtenues grâce à la méthode de vélocimétrie par images de particule y est discutée ; les problèmes de non-corrélation, de convergence statistique des résultats y sont par exemple abordés. L’analyse des champs de vitesse permet de mettre en évidence la structure des panaches et de proposer une classification des jets EHD. Le chapitre III est consacré à l’étude de la force électrique dans les panaches EHD. L’actionneur utilisé pour produire le jet plan est de type lame-plan. Trois méthodes indirectes ont été utilisées pour estimer la force à partir du champ de vitesse. La première méthode appelée méthode intégrale classique calcule la force par intégration volumique de l’équation de Navier-Stokes. La deuxième méthode appelée méthode RANS intégrale estime la force à partir de chacun des termes de l’équation RANS en utilisant une décomposition de la vitesse en valeur moyenne et fluctuation. Enfin, la force est également calculée selon une troisième méthode basée sur une modélisation simplifiée de l’écoulement inspirée des travaux de Malraison et Atten. Dans le dernier chapitre, l’étude est étendue à un écoulement électroconvectif de type jet de paroi électrique. Il est généré par un actionneur à barrière diélectrique. L’étude est faite avec deux types des liquides diélectriques différents. Comme pour le jet plan, l’analyse des champs de vitesse permet de définir les structures de l’écoulement, mais également de calculer l’intensité de la force produite.
Mots-clés : contrôle d’écoulement, électrohydrodynamique, injection de charges, liquide diélectriques, force électrique.
Summary
This work is related to the analysis of the structure of electrohydrodynamic plane plumes also called electrohydrodynamic jets in plane geometry. The aim of this work is to provide a more precise description and a better understanding of its physical phenomenon and to quantify the electric force using the simple models. Chapter I is a literature review which provides a summary of two flows with the structure very similar to EHD jets: classic jets and thermal plumes. Chapter II is devoted to the presentation of the experimental setup and method used in this study. The quality of the measurements obtained by the method of Particle Image Velocimetry is discussed; problems of non-correlation and statistical convergence of the results are also discussed. The analysis of velocity fields allows us to identify the structure and propose a classification of the EHD plumes. Chapter III is devoted to the study of the electric force in the EHD plumes. The actuator used to produce the plane jet is a blade plane device. Three indirect methods were used to estimate the force from the velocity field. The first classical method called integral method calculates the force by volumetric integration of Navier-Stokes equations. The second method called RANS
2
integral method estimates the force from each term of RANS equation using the average and fluctuating velocity components. Finally, the force is also calculated using a third approach with a simplified flow model based on the work of Malraison and Atten. In the last chapter, the study is extended to one type of électroconvectif flow: the electrical wall jet. It is generated by a dielectric barrier actuator. The study is carried out with two different dielectric liquids. As is the case with plane jet, the analysis of velocity fields is used to define the flow structures and calculate the force produced.
Keywords : flow control, electrohydrodynamics, charge injection, dielectric liquid, electric force.
3
Nomenclature
Champs de vitesse
Symbole Définition Unité Équation
Vitesse caractéristique du fluide ̅ Composante de vitesse moyenne dans la
direction, = , ,
̅,0 Composante de vitesse moyenne dans la
direction en sortant de la buse, = , ,
̅,� Composante de vitesse moyenne axiale
(au centre du jet) dans la direction , = , ,
̅, Point de vitesse moyenne où sa vitesse
dans la direction i est égale à la moitié de la vitesse axiale, = , ,
̅
, = ̅,�
̅, Composante de vitesse moyenne dans la direction en sortant de la buse
= , ,
Composante de vitesse instantanée dans la direction , = , ,
′ Composante fluctuante de vitesse dans la
direction , = , ,
′ Composante fluctuante de vitesse des
coordonnées cylindriques, = , ,
, Ecart-type de vitesse dans la direction ,
= , ,
′ ′
̅̅̅̅̅̅ Contrainte de cisaillement de tenseur de
Reynolds, , = , ,
Nombre du Reynolds
Symbole Définition Unité Équation
Nombre de Reynolds en général
= Nombre de Reynolds pour un jet plan
=
ReD Nombre de Reynolds pour un jet rond =
� Nombre de Reynolds pour caractériser la
couche de mélange � =
Nombre de Reynolds pour caractériser la
zone du jet loin de la buse (locale) =
� Nombre de Reynolds critique pour passer
d’un régime laminaire à un régime turbulent
4
Jet classique
Symbole Définition Unité Équation
Viscosité cinématique du fluide
Hauteur de fente pour jet plan Diamètre de la buse pour jet rond
Distance buse/plaque pour le jet impactant
0 Origine virtuelle de la vitesse du jet (si
l’axe du jet suivant )
Origine virtuelle pour l’expansion de radiale du jet
Rayon de contraction=épaisseur de plaque de la buse
Rapport d’aspect, sur la sortie de buse
= Largeur de la buse d’un jet plane
̇0 Débit de quantité de mouvement à la
sortie de la buse ̇0 = ∫ ,0
Taux de décroissance de la vitesse pour le jet plan
Taux de décroissance de la vitesse pour le jet rond
Demi-largeur de jet plan (l’axe suivant ) Demi-largeur de jet plan (l’axe suivant ) Demi-largeur de jet rond
Taux d’expansion du jet plan
Taux d’expansion du jet rond
Intensité turbulente dans la direction,
= , , = √̅̅̅̅ ̅ ′
,� Intensité turbulente sur l’axe ,� Intensité turbulente totale
Panache thermique
Symbole Définition Unité Équation
Hauteur du panache plan Rayon de la source thermique
,0 Débit de masse à la sortie de la buse
,0= ∫ ,0
Rayon efficace de la vitesse moyenne à la
buse ronde =
,0
̇0
̅
0 Intensité turbulente moyenne à la buse ̅
0 = ∫ 0∗ Échelle de rayon de panache en
comprenant le débit de masse, quantité de mouvement et l’intensité turbulent moyenne à la sortie de la buse
0∗ = 0̅−
5
Panache EHD
Symbole Définition Unité Équation
Constante de vitesse de dissociation − Constante de vitesse de recombinaison s Largeur hydraulique du panache EHD
Largeur de la zone chargée
Demi-largeur de jet si l’axe du panache
EHD plan
0 Largeur caractéristique du panache EHD
plan où sa vitesse dans la direction est égale à 0,1 de la vitesse axiale
Largeur efficace pour le panache EHD
plan =
+∞ −∞
+∞ −∞ , Débit de masse calcule par
Distance lame plan
�⃗ Densité de courant électrique
Courant électrique total A
� Mobilité d’ionique ∙
Coefficient de diffusion Densité volumique de charge
0 Intégrale de la charge par unité de
longueur pour une section fixée Vitesse principale pour le modèle panache
EHD, autres deux composantes , .
� Vitesse principale axiale pour le modèle
panache EHD
μ Viscosité dynamique Pa ∙ s
̅ Champ moyen dans direction ,
= , ,
, Coefficients de la vitesse centrale pour le modèle panache EHD
, Coefficients de la demi-largeur pour le modèle panache EHD
0, Coefficients du champ moyen pour le
modèle panache EHD
̅ Terme regroupant l’ensemble du terme
dérivé de force et gradient de pression pour la méthode intégrale classique,
= , ,
̅ Terme regroupant l’ensemble du terme
dérivé de force et gradient de pression pour la méthode RANS intégrale,
6
Autres
Symbole Définition Unité Équation
Dimension caractéristique de longueur en générale
Epaisseur de vorticité
= ̅ ∆ ̅
Demi-largeur du jet en générale
, , Composante dans un repère cartésien
7
Plan du mémoire
Ce travail est la première partie d’un projet qui a pour objectif de développer des dispositifs de contrôle électrohydrodynamiques. De façon plus précise, il porte sur l’étude d’un actionneur de type lame plan avec deux objectifs principaux. Tout d’abord mieux comprendre la physique de l’écoulement grâce à l’analyse structurelle de l’écoulement induit par l’actionneur. Puis, développer des méthodes de mesure de la force électrique générée par actionneurs pour permettre la mise en place de stratégies de contrôle.
Le Chapitre I est une synthèse de données bibliographiques consacrée à l’étude de la structure de trois écoulements de référence : le jet libre, le panache thermique et le jet de paroi. L’objectif est de disposer d’une base de connaissances sur les comportements classiques des écoulements en mécanique de fluides. La présentation n’est pas exhaustive, mais se limite aux seules données utiles à la démarche comparative proposée dans le chapitre II. Comme dans la littérature, les écoulements sont le plus souvent classés en fonction de leur nombre de Reynolds, le chapitre commence par un rappel sur les différentes façons de calculer le Reynolds d’un écoulement. Les paragraphes suivants présentent la structure des trois écoulements de référence : le jet libre, le jet de paroi et le panache thermique. La présentation y est faite classiquement, selon un découpage en trois zones principales : zone potentielle ou zone de développement, zone de transition et zone autosimilaire. Pour chacune de ces zones, quatre caractéristiques principales ont été retenues : évolution de la vitesse axiale, variation de la forme du profil de vitesse, accroissement de la demi-largeur et comportement de l’intensité turbulente.
La fin du chapitre propose également une introduction à l’électrohydrodynamisme. Les deux principaux mécanismes de création de charges dans les liquides que sont l'injection et la dissociation/recombinaison y sont présentés. La fin du chapitre propose un bilan des données et connaissances bibliographiques disponibles sur les écoulements électrohydrodynamiques. Quatre modèles proposés par Malraison et Atten y sont détaillés : écoulement laminaire et turbulent en configuration axisymétrique et plane. Dans ce document, ces modèles servent de base à l’analyse proposée dans le chapitre II ainsi que de support à l’une des méthodes développées dans le chapitre III pour estimer la force électrique produite.
Dans le chapitre II, on s’intéresse à la structure d’écoulements EHD produits par un dispositif lame/plan. Toute la démarche s’appuie sur l’analyse de champs de vitesse obtenus par la méthode de vélocimétrie par image de particule PIV. Bien que cette méthode soit aujourd’hui bien maîtrisée et largement utilisée en mécanique des fluides sa mise en pratique dans un écoulement chargé reste délicate. La première partie du chapitre expose de façon détaillée l’ensemble des vérifications, réglages et protocole de mesure que nous avons réalisé pour garantir la qualité des mesures. Ainsi, le choix : des particules et de leur concentration, de l’intervalle de temps ∆t entre deux images sont discutés. Après une rapide présentation de la méthode d’analyse statistique choisie, le nombre d’images minimums nécessaires à l’analyse statistique des résultats est aussi testé. L’ensemble des résultats obtenus dans ce document est donné sous la forme de valeurs moyennes et d’incertitudes. La deuxième partie est une présentation détaillée de la méthodologie utilisée pour l’analyse de nos écoulements. Elle s’appuie sur une configuration représentative. Avec dans l’ordre des
8
actions réalisées : l’acquisition des champs de vitesse, observation du comportement global en champ moyen puis extractions de quatre caractères principaux : évolution de la vitesse axiale, variation de la forme des profils de vitesses, l’évolution de la demi-largeur et l’évolution de l’intensité turbulente axiale. Les résultats sont ensuite comparés avec ces mêmes données relevées sur les trois écoulements de référence (et présentée au chapitre I). La fin du chapitre se reconcentre sur l’ensemble des écoulements EHD produits par le dispositif lame/plan. L’influence des deux paramètres : distance et potentiel est discutée. Au vu de ces résultats, une méthode d’adimensionnement est proposée pour définir une classification des ensembles des panaches.
Le chapitre III est entièrement consacré à l’étude de la force électrique. Le chapitre commence par une revue bibliographique des méthodes de mesure de force utilisées en mécanique des fluides. Celles-ci peuvent être regroupées en deux grandes familles. Tout d’abord, les méthodes directes qui mesurent la force grâce à des capteurs typiquement avec une balance. Et les méthodes indirectes qui permettent d’estimer la force à partir de données autres que des mesures de force. Nous ne présentons ici que les méthodes qui permettent d’estimer la force à partir du champ de vitesse du liquide : les méthodes intégrales, et les méthodes différentielles. La deuxième partie du chapitre se concentre sur la mise en application de deux méthodes intégrales. La première méthode, appelée la méthode intégrale normale, permet d’estimer la force à partir du champ vitesse en intégrant l’équation de Navier-Stokes. La deuxième méthode, appelée la méthode RANS (Reynolds Averaged Navier Stokes Integral Method), permet également de calculer la force à partir du champ de vitesse, mais en utilisant l’équation RANS. Puis, les résultats de ces deux méthodes sont comparés. La fin du chapitre explore une autre voie : l’intégration de modèles simplifiés. L’objectif est ici de réduire le temps de calcul nécessaire à l’estimation de la force dans le but de développer des applications de contrôle. On trouve dans la littérature plusieurs modèles simplifiés. Ces modèles ont été développés dans le cadre d’études théoriques avec pour ambition de décrire la physique des phénomènes EHD. Les plus célèbres d’entre eux ont été développés en relation avec le duo Malraison et Atten de l’équipe de Grenoble.
Le chapitre IV est consacré à l’analyse de l’écoulement électroconvectif généré par un actionneur à barrière diélectrique (actionneurà barrière diélectrique. Cet actionneur a déjà été étudié par Michelle Daaboul au cours de sa thèse en 2006. Il a montré que dans du gasoil et sous certaines conditions, l’actionneur produit un jet de paroi turbulent ou se comporte comme un générateur de tourbillon. La première partie du chapitre rappelle les résultats obtenus par Daaboul en insistant plus particulièrement sur l’influence de paramètres comme la fréquence et le potentiel du signal de commande. La suite du chapitre expose les résultats de l’étude que nous avons menée, sur le comportement de cet actionneur dans l’huile de silicone. L’influence du type de signal : continu ou alternatif, l’influence du potentiel, de la fréquence, de la forme du signal (dans le cas alternatif, etc.) y sont présentés. En fin chapitre, les méthodes utilisées au chapitre III sont reprises pour calculer la force électrique produite dans le gasoil et l’huile de silicone. L’association de la méthode intégrale et d’une analyse de phase permet une première mesure instationnaire de la force.
9
Chapitre I. Introduction
Ce chapitre propose une analyse mécanique et électrique du comportement des jets EHD à partir de champs de vitesses expérimentaux obtenus par vélocimétrie laser d’images de particules. La description proposée s’appuie sur une mise en perspective des écoulements EHD avec deux écoulements classiques : les jets et les panaches thermiques.
Après, une introduction consacrée : aux comportements des jets classiques, aux panaches thermiques ainsi qu’aux principes de bases de l’EHD ; l’essentiel du chapitre porte sur l’analyse et comparaison du comportement ces jets.
1.1. Présentation du jet classique
Cette première partie est consacrée à une rapide présentation des connaissances acquises depuis de nombreuses années sur la physique des jets classiques. Le qualificatif classique fait ici référence à des jets produits à l’aide de moyen mécanique du type buse et pompe. Il n’est pas possible ici d’énumérer l’ensemble des connaissances accumulées mais seulement de présenter celles qui feront écho au travail réalisé dans cette thèse sur les jets EHD.
Les jets sont créés en injectant du fluide dans un milieu infini au repos constitué du même fluide. On parle alors de jets monophasiques. En pratique, le fluide est injecté dans un réservoir via une buse cylindrique ou une fente. Le jet est dit « libre » dans le cas où les parois du réceptacle ne perturbent pas le jet. Lorsque les parois latérales influencent le comportement du jet celui-ci est dit confiné, enfin si le jet rebondit sur une des parois, il est qualifié de jet impactant.
1.1.1. Définition du Nombre de Reynolds du jet
Comme la plus part des écoulements, les jets sont classés en fonction de leur nombre de Reynolds. Ce nombre sans dimension représente le rapport entre les forces d’inertie et les forces visqueuses.
En générale, on le définit de la façon suivante :
=
(1.1)
Le choix de la vitesse caractéristique et de la viscosité cinématique ne fait pas débat. En pratique, la vitesse du jet est utilisée comme vitesse caractéristique et est la viscosité cinématique du fluide étudiée. Par contre, il y a de multiples possibilités pour le choix la longueur de référence. Trois méthodes sont couramment utilisées dans les études de jet.
Dans certaines études, c’est le diamètre de la buse ou la hauteur de fente qui sert de longueur de référence. Dans ce cas nous utilisons la notation = pour un jet plan et = . Dans d’autres, c’est l’épaisseur de vorticité qui donne la longueur caractéristique. L’épaisseur de vorticité ou épaisseur de la couche
10
de mélange se développe au fur et à mesure que le jet s’éloigne de la buse. Elle varie en fonction de la distance et du temps. Elle est définie de la manière suivante :
= ̅ ∆ ̅
(1.2)
Où ∆ ̅ est la différence de vitesse entre le jet et le milieu ambiant. L’épaisseur de vorticité est une mesure de la hauteur sur laquelle le profil de vitesse moyenne sur une section local présente une forme de gradient. (voir figure 1.1).
Figure 1.1 : Développement de la couche de mélange entre le jet et le milieu ambiant (photo de Brown & Roshko (1974), et profil de vitesse associé [1].
Cette méthode est privilégiée dans le cas d’études portant sur le développement de la couche de mélange au voisinage immédiat de la sortie de buse.
� =
(1.3)
Dans le troisième groupe enfin, lorsque l’étude se situe loin de la buse, c’est le rayon ou la demi-largeur du jet qui donne l’unité de longueur. Le terme de rayon ou de demi-largeur du jet est défini dans la nomenclature de ce document.
=
(1.4)
Quel que soit le système étudié, il existe en général un nombre de Reynolds critique au voisinage duquel l’écoulement passe de laminaire à turbulent.
Lorsque le Reynolds de l’écoulement est inférieur au Reynolds critique on observe que, dans l’équation de Navier-Stokes, le terme visqueux est bien plus important que le terme convectif non-linéaire. Ce dernier peut alors être négligé et l’équation de Navier-Stokes prend alors une forme linéaire dont la solution est stable. Dans ce cas, l’écoulement est dit laminaire.
11
c’est le terme convectif qui domine. L’équation de Navier-Stokes est alors fortement non linéaire et l’écoulement est dit turbulent.
Dans le cas d’un fluide circulant dans un tube cylindrique, par exemple, l'écoulement passe d’un régime laminaire à un régime turbulent lorsque le nombre de Reynolds atteint une valeur critique ( > �=2300).
1.1.2. Jet libre
1.1.2.1. Structure du jet libre
Selon la définition donnée précédemment, un jet libre est un jet qui n’interagit avec aucune paroi. Un jet libre est dit turbulent lorsque son Reynolds calculé à partie de la taille de la buse est supérieur à 20. Ceci peut paraître paradoxal puisque l’écoulement qui produit le jet en jaillissant d’une buse n’est lui turbulent que lorsque son Reynolds est supérieur à 2300. Cet écart s’explique par la nature même du jet. À la différence des parois internes de la buse, le fluide ambiant peut se mettre en mouvement très facilement. Le fort cisaillement qui existe sur les bords des jets entre le fluide sortant de la buse et le fluide ambiant initialement au repos induit le
développement d’instabilités de Kelvin-Helmholtz qui créent dès la sortie du jet des
tourbillons et provoquent la transition turbulente du jet.
La figure 1.2 présente un exemple d’écoulement de type jet libre turbulent. Sur cette
image instantanée, on observe l’apparition de structures cohérentes dès la sortie de la buse sur toute la périphérie du jet. Dans le cas des jets ronds, comme sur l’exemple présenté figure 1.2, elles prennent la forme d'anneaux tourbillonnaires. Au fur et à mesure qu’elles s’éloignent de la buse, ces structures s'apparient et deviennent plus en plus grosses, puis se cassent en générant une turbulence fine. La turbulence est alors pleinement développée et on note l'apparition de nouvelles structures.
Figure 1.2 : Schéma d’un jet rond turbulent à fort nombre de Reynolds.
Un jet se définit à l’aide de plusieurs paramètres (voir figure 1.3) de façon habituelle, on décompose les jets en trois zones :
12
Figure 1.3 : Structure d’un jet libre [2].
La zone potentielle : Cette première zone est située au voisinage immédiat de la buse. Elle est caractérisée par : le développement d’une couche de cisaillement à la frontière entre le jet et le milieu ambiant, mais également par une zone située au centre du jet, appelée cône de potentiel. Le cône de potentiel se définit comme la zone dans laquelle l’écoulement conserve des propriétés identiques à celle observées à l’intérieur de la buse. En pratique, on définit cette zone comme étant le lieu où la vitesse sur l’axe est égale à 95%-99% de la vitesse en sortie de buse ̅ ,0.
La zone de transition : Elle s’étend de la fin de la zone potentielle à plusieurs fois le diamètre de la buse pour les jets cylindriques ou plusieurs fois la largeur de la fente pour les jets plans. Cette zone est également caractérisée par la fusion des couches de mélange et donc la disparition complète du cône potentiel. On observe l’épaississement du jet ainsi que la décroissance de la vitesse axiale dès le début de cette zone. Le jet devient turbulent et la couche de mélange occupe tout le jet, mais la turbulence n’est pas encore pleinement développée.
La zone pleinement développée ou zone d’écoulement établi : Dans cette zone, la
turbulence est pleinement développée. Elle est caractérisée par une intensité turbulente constante. Cette zone possède également un caractère autosimilaire, qui implique que les profils de vitesse moyenne dans la direction transversale ont une allure identique, autosimilaire, indépendante de leur position. Les profils de vitesse transversaux convenablement adimensionnés suivent alors une distribution gaussienne. On constate également que, le jet s’élargit de manière linéaire, et la décroissance de vitesse axiale suit une loi inversement proportionnelle à la distance [3]. Enfin, il semble que certaines caractéristiques comme le taux d’expansion ou le taux de décroissance de la vitesse sur l’axe du jet se révèlent dépendantes du nombre de Reynolds.
1.1.2.2. Propriétés caractéristiques du jet libre
Il faut noter que même si les jets classiques sont étudiés depuis longtemps, ils ont également beaucoup d’applications industrielles et sont sans cesse le sujet de nouvelles observations. Au fur à mesure du développement de nouvelles technologies ou méthodes d’analyses, les jets continuent d'être l'objet de nombreuses recherches fondamentales en mécanique des fluides. Dans les années 80, l’utilisation de mesures par vélocimétrie laser type LDV ou PIV ont permis, par exemple, de montrer que les mesures de vitesse antérieures, réalisées avec des fils chauds, pouvaient être biaisées. Aujourd’hui, on trouve dans la littérature un grand nombre de publications sur le
13
comportement des jets en fonction des conditions de sortie. Ces études montrent qu’en modifiant par exemple la géométrie de la buse des comportements d’une grande variabilité peuvent être observés.
Nous présentons ci-dessous un ensemble de courbes caractéristiques issues d’études différentes menées dans des années 2000. Nous nous référons plus particulièrement aux résultats de Deo qui a fait des études de jets plans sur l’influence de variant de 1500 à 16500 [4] et sur l’influence de la géométrie de la buse pour =1,80×104
[5]ainsi qu’à ceux de Quinn [6] qui a mené des études similaire sur les jets ronds à
=1,84×105 et de Papadopoulos avec de 4800 à 17500 [7].
Nous ne présentons ici que les 4 paramètres utiles dans le cadre de cette étude, mais le lecteur qui souhaite s’intéresser à l’étude des jets est invité à se reporter sur l’un des nombreux ouvrages consacrés aux jets et dont les plus célèbres sont sans aucun doute : Abramovich (1963) [8] , Schlichting (1968) [9], Pope (2000) [10].
1.1.2.2.1. Évolution de la vitesse centrale
L’un des paramètres le plus souvent repris dans les études de jet est l’évolution de la vitesse au centre du jet ou vitesse axiale. C’est elle qui permet de délimiter les trois zones : zone potentielle, zone de transition, et zone pleinement développée.
Très logiquement, on observe dans tous les jets que la vitesse axiale diminue lorsque qu’on s’éloigne de la buse. Au fur et à mesure que le jet s’éloigne de l’orifice, il entraine avec lui une certaine quantité de fluide environnant. La quantité de mouvement totale se conserve, mais le flux massique augmente. Le jet s’élargit et la vitesse axiale diminue.
Il a été remarqué, qu’à une certaine distance de l’orifice la décroissance de la vitesse axiale ̅,� adopte systématiquement le même comportement. Elle décroit de façon inversement proportionnelle à la distance à l’orifice pour les jets ronds et inversement proportionnelle à la racine carrée de pour les jets bidimensionnels de type jet plan. Ces phénomènes se retrouvent dans les deux équations suivantes :
Jet plan (figure 1.4 et figure 1.6a)
̅,� ̅ ,0= [ − 0 ]−
(1.5)
Jet rond (figure 1.5 et figure 1.6b)
̅,� ̅ ,0= [ − 0 ]−
(1.6)
La figure 1.4a illustre ce comportement typique dans le cas de cinq jets plans. La courbe représente la variation de l’inverse de la vitesse au carré en fonction de la distance . On peut observer que les cinq courbes sont horizontales aux faibles valeurs de . En effet, dans cette partie proche de la fente, la vitesse axiale des jets est constante et égale à la vitesse de sortie du jet ̅ ,0. C’est la zone du cône de
14
potentiel. Il y a ensuite une phase de transition puis, les courbes prennent la forme de droites. A cet endroit, la vitesse axiale des jets varie de façon inversement proportionnelle à la racine carrée de la distance. La pente des droites et donc leurs coefficients apparaissent comme légèrement différents. En effet, il a été démontré que la valeur de dépend de la géométrie de l’orifice.
Dans un jet rond, une fois franchi la zone de transition, la vitesse diminue de façon inversement proportionnelle à la distance. C’est un point caractéristique des jets ronds. Seul le coefficient directeur des droites change en fonction de la géométrie de la buse ce qui semble montrer que le coefficient est lui aussi dépendant de multiples paramètres.
a b
Figure 1.4 : Décroissance de la vitesse moyenne centrale adimensionnée d’un jet plan de différents ratios (a), géométrie de la buse associée[4] (b).
La figure 1.5a présente la décroissance de la vitesse axiale observée cette fois sur des jets ronds de différents ratios [4]. Quel que soit le ratio observé, on note le même comportement que sur les courbes. Une première partie horizontale, une transition, puis une croissance linéaire. La différence vient du fait que sur ce second graphique ce n’est plus l’inverse de la vitesse au carré qui est représenté en fonction de mais l’inverse de la vitesse.
et ont été mesurés expérimentalement par plusieurs chercheurs. Différentes études réalisées dans les années 70 ont estimé que varie de 0,14 à 0,21. Dans un article de 1976 Rajaratnam [3] propose une valeur moyenne de 0,16. a lui été évalué à 0,15 dans le cas de jets rond d’eau[11-15] et autour de 0,17 dans l’air [16-17].
En 1999 Papadopoulos [7] s’intéresse à l’influence du nombre de Reynolds sur la décroissance de la vitesse axiale. Deo [4] réalise le même type d’étude sur les jets plan en 2008. Ils réalisent tous deux des tests pour des Reynolds compris entre 1500 et 17500. Quel que soit le Reynolds étudié ils retrouvent systématiquement les mêmes lois de variation de vitesse : inversement proportionnelle au carré de la distance pour les jets plan et inversement proportionnel à la distance pour les jets plans. On peut noter que Deo n’utilise pas le même mode de représentation. Il illustre le
15
comportement linéaire de la courbe en utilisant une représentation logarithmique de la fonction.
a b
Figure 1.5 : Décroissance la vitesse moyenne centrale adimensionnée d’un jet rond pour les différentes géométries de sortie de buse (a), géométrie de la buse associée [6] (b).
Les deux auteurs s’intéressent également à l’influence du Reynolds sur le taux décroissance (figure 1.6). Ils observent ainsi que et augmentent avec le Reynolds. Dans son étude sur les jets plans Deo va plus loin. Selon lui, varie de façon importante à bas Reynolds mais semble avoir un comportement asymptotique en lorsque le Reynolds tend vers 25000 (figure 1.7). La valeur asymptotique n’est, elle-même, pas constante; elle dépend du rapport d’aspect AR de la fente et situe la valeur de autour de 0,18.
a b
Figure 1.6 : Influence de (a) pour un jet plan et (b) pour un jet rond sur la décroissance de la vitesse axiale.
La variation de la vitesse axiale permet d’avoir une information sur la forme du jet. Le coefficient de proportionnalité de -1 ou de -0,5 apporte une distinction nette entre jet rond et jet plan. Les coefficients et sont d’une plus grande variabilité. Cependant, ils fournissent une information complémentaire sur le facteur d’aspect.
16
Figure 1.7 : Évolution de en fonction de pour différent ratio d'aspect
( = ).
1.1.2.2.2. Évolution de la forme des profils de vitesse
C’est une autre caractéristique importante très regardée dans les études de jets. La plus part des travaux réalisés sur ce sujet montrent que les profils de vitesse adimensionnés deviennent auto-similaires au-delà d’une certaine distance à l’origine. Cela signifie qu’à une distance suffisante de l’orifice, tout profil adimensionné en vitesse en position respectivement par la vitesse sur l’axe ̅,� et par la demi-largeur du jet
( jet plan ou jet rond), prend systématiquement la forme d’une Gaussienne d’équation :
̅ ̅,� = − ln ∗
(1.7)
a b
Figure 1.8 : Superposition de profils adimensionnés pris en différentes sections (a) d’un jet plan ratio=0,45 =1,8×104 [5] (b) jet rond où est la légende radio ou diamètre sur la courbe de gauche à nombre de Reynolds 1×105 [10].
La figure 1.8 présente un ensemble de profils de vitesse adimensionnés en différentes sections d’un jet plan figure 1.8 (a) et d’un jet rond figure 1.8 (b). Dans le cas du jet plan, les profils deviennent similaires à partir de =20. Pour le jet rond la figure (b) montre que les profils se superposent au-delà de =40. Certains auteurs comme [5]
17
montrent cependant que l’apparition du régime auto-similaire dépendant du rapport . Plus celui-ci est grand, plus il faut de temps pour atteindre le régime auto-similaire. Quel que soit, le type de jet (plan ou rond), tous les profils de vitesse sont gaussiens dans la zone auto-similaire (voir la figure1.8) [17].
1.1.2.2.3. Évolution de la demi-largeur du jet
Comme nous l’avons précisé plus avant, la demi-largeur largeur d'un jet plan ou
jet rond est définie comme la distance entre l'axe central du jet et le point où la vitesse est égale à la moitié de sa valeur sur l'axe du jet ̅,� . Les différentes études indiquent également qu’au-delà d’une certaine distance, la demi-largeur augmente linéairement avec la distance .
Dans la zone linéaire, la relation est de la forme :
Pour le jet plan
= −
(1.8)
Pour le jet rond
= −
(1.9)
Où est le taux d’expansion du jet et est une origine virtuelle pour l’expansion
radiale du jet. Il faut noter que les origines virtuelles 0 et ne sont pas nécessairement égales [ 18 ] et dépendent fortement des conditions géométriques d’entrée (jet issu d’un orifice, d’un tube, d’un convergent).
Deo [4] a étudié les variations de dans le cas de jets plans pour des Reynolds allant 1500 à 16500. Il a mesuré que diminue de 0,14 à 0,09 lorsque le nombre de Reynolds augmente. La même tendance a été observée sur les jets ronds d’eau par Rivière [19]. Il observe une diminution de du 0,09 au 0,075 lorsque le nombre de Reynolds varie de 2200 à 16000.
L'évolution caractéristique de la demi-largeur d’un jet est représentée sur la figure 1.9. Les courbes (a) et (b) présente respectivement les évolutions d’un jet rond et d’un jet plan. Quelle que soit la géométrie du jet : plane ou axisymétrique, les courbes sont composées d’une partie initiale plus ou moins plate, suivie d’une zone de croissance linéaire. La figure 1.9 montre également que la valeur ne dépend pas seulement du nombre de Reynolds, mais également de la forme de l’orifice.
Dans le cas d’un jet rond, un orifice tranchant favorise le mélange en sortie de buse et conduit donc à un taux d’expansion plus important ; de la même façon, pour un jet plan, un petit rapport induit à un taux d’expansion plus important.
La variation linéaire de la demi-largeur est une caractéristique intrinsèque de l’ensemble des jets. Cette évolution est totalement indépendante du type de jet étudié.
18
Le taux d’expansion ou est également un paramètre intéressant puisse qu’il caractérise assez bien le mélange entre le jet et le milieu ambiant. Il est cependant dépendant à la fois de la géométrie de la buse ainsi que du Reynolds du jet.
a b
Figure 1.9 : Évolution de la demi-largueur (a) d’un jet plan [5], (b) d’un jet rond [6].
1.1.2.2.4. Intensité turbulente de la vitesse
Prenons la direction . L’intensité turbulente se définit comme le rapport de la fluctuation de vitesse sur la vitesse moyenne locale ̅ .
Elle donne une information sur le niveau de turbulence de l’écoulement. On pourra désigner suivant la valeur de le champ turbulent comme faible si ≈1% , moyen
≈10%, et fort lorsque ≈20%.
= √̅̅̅̅ ̅ ′
(1.10)
Dans le cas des jets, la plupart des auteurs étudient la variation de l’intensité turbulente sur l’axe du jet ̅ = ̅,�. Ils observent que l’intensité turbulente commence par
augmenter, passe parfois par un maximum, puis devient constante dans la zone pleinement développée. La figure 1.10 présente les résultats obtenus par [5] et [6] dans leurs études sur des jets respectivement plans et ronds.
L'augmentation rapide de l’intensité turbulente en sortie de buse est une caractéristique intrinsèque des jets [20]. Elle reflète la croissance d’instabilités dans la couche de cisaillement dû notamment à la présence de structures à grandes échelles dans cette zone. Selon Deo [5], le pic d’intensité turbulente est lié à la présence par intermittence, de grosses structures sur l’axe du jet. L’alternance de ces structures avec des écoulements basses vitesse en provenance du milieu ambiant créé des fluctuations de vitesse élevées. L’intensité turbulente atteint sa valeur maximale aux environs de
=10 ou =8. Cette valeur maximale varie en fonction du type d’orifice. Une buse
acérée est synonyme de mélange plus intense dans cette zone, et donc d’une intensité
19
Lorsqu’on s’éloigne de cette zone initiale, les grosses structures disparaissent. Elles sont remplacées par des tourbillons de plus en plus petits qui occupent tous les jets. Cette répartition plus homogène, multi-échelle, réduit l’intermittence et l’intensité turbulente devient constante[21].
a b
Figure 1.10 : Évolution de l’intensité turbulente du jet plan sur l’axe [5] (a). évolution de l’intensité turbulence du jet rond sur l’axe [6] (b).
1.1.3. Le jet de paroi classique
Le jet de paroi ou « wall jet » est un écoulement qui se développe le long d’une surface. Il s’obtient principalement de deux façons : soit à l’aide un jet propulsé tangentiellement le long d’une paroi soit consécutivement à l'impact d’un jet sur une surface. Ce type de jet a de nombreuses applications pratiques. Dans le domaine industriel, les applications les plus fréquemment citées sont le refroidissement et le chauffage, le désembuage et le séchage, et le rinçage des surfaces. Ce jet est également souvent utilisé dans le contexte de chauffage ou d’annelage des plaques métalliques ou de verre pendant la fabrication [22]. Dans toutes ces applications, la structure turbulente du jet de paroi, en particulier des points proches de la surface, est un paramètre déterminant pour les performances du système.
Ce jet est aussi un sujet fréquent d’études fondamentales. Une attention considérable a été portée à la fois sur l’étude théorique et l’étude expérimentale des jets de paroi aussi bien laminaires que turbulents. Beaucoup d’études portent également sur les jets de paroi se développant sur des surfaces incurvées (voir la figure 1.11). Comme par exemple, l’étude de Newman (1961) [23] et Wille & Fernholz (1965) [24] qui porte sur la déviation d'un jet de paroi circulant le long d’une paroi convexe. Les travaux sur les écoulements autour d’un cylindre de Newman [23], Nakaguchi [25] et Fekete [26]. On trouve même dans la littérature des études tridimensionnels de jets sortant de buse de largeur finie et évoluant le long d'une paroi plan (voir la figure 1.12), Newman et al. (1972)[27], Davis (1980) [28] et Kebede (1982) [29].
En raison de sa complexité, le comportement de ce jet reste difficile à modéliser. Il n’existe pas comme pour les jets libres de modèle de comportement adimensionnel universel. Il y a eu beaucoup de tentatives pour trouver des lois d'échelle, c'est-à-dire trouver des adimensionnements, identifier la présence de zone autosimilaire [30] mais sans grand succès. Le plus souvent, il est nécessaire d’apporter un grand nombre d'hypothèses pour prédire certaines propriétés.
20
Figure 1.11 : Schéma d’un jet de paroi MHD s’écoulant le long d’une surface incurvée.
Figure 1.12 : Schéma d’un jet de paroi tridimensionnelle.
Les jets les plus étudiés restent cependant les jets de paroi plane et les jets de paroi radiale pour leurs caractéristiques bidimensionnelles 2D et leur symétrique d’axe. Le jet de paroi plan bidimensionnel est souvent formé par un fluide sortant d’une buse fente, c’est-à-dire ayant un grand ratio largeur/hauteur.
La buse peut être placée tangentiellement (figure 1.13) ou perpendiculairement à la paroi (figure 1.14). Dans le premier cas, le jet de paroi se développe dès la sortie de buse alors que dans le second cas, il se forme seulement après impact sur la surface. Plusieurs séries d’études sur ce type de dispositif ont été effectuées par Erikssion et Karlsson [31-36], et également par Bakke (1957), Bradshaw (1959), Hodgson (1965), Poreh et al. 1967), Witze (1974), Tanaka (1977), and Codazzi et al. (1981) [37-43].
Un très bon résumé des résultats datant d’avant 1981 se trouve dans Laver et Rodi [44]. On peut y trouver les principales observations issues de diverses études expérimentales. Depuis 90s, avec l'amélioration de la méthode par fil chaud et surtout utilisation de systèmes d’anémométrie laser Doppler (LDV), plusieurs études plus complètes ont permis d’obtenir davantage de précision en proche paroi notamment en ce qui concerne les contraintes de cisaillements (Wygnanski et al. [45] Schneider et Goldstein,[46] Abrahamsson et al. [31] et Eriksson et al. [32] Venas et al.[47])
21
a b
Figure 1.13 : Schéma d’un jet de paroi bidimensionnel placé tangentiellement à la paroi(a), photo instantanée d’un jet (b) [48].
Figure 1.14 : Schéma de l'évolution de l'écoulement impactant d'un jet rond sur une paroi. Des anneaux tourbillonnaires dans le champ proche de l'orifice, des profils de vitesse de jet libre et de jet de paroi radial dans le champ lointain.
1.1.3.1. Structure du jet de paroi
Une façon classique de définir les différents paramètres du jet consiste à prendre le cas d’un jet turbulent sortant d’une fente placée sur la paroi et de vitesse initiale ̅ ,0
sur la figure 1.15 sont représentés de façon schématique : la fente de hauteur d (formée d’une paroi verticale placée perpendiculairement à la paroi à une distance d) et un profil de vitesse typique d’un jet de paroi.
On peut noter que pour définir la demi-largeur du jet deux paramètres différents sont nécessaires : , , . , sert à la caractérisation de la demi-largeur supérieure et , de la demi largeur inférieure. En effet, il a été démontré que les jets de paroi se décomposent en deux parties aux comportements distincts. Une partie basse située entre la surface et le point de vitesse maximale et une partie haute au-dessus de . Dans la partie basse appelée, la couche intérieure, le jet se comporte comme une couche limite turbulente, tandis que la partie haute (couche extérieure) le jet se comporte comme un écoulement libre. Ces deux parties aux comportements totalement différents font des jets de paroi des écoulements singuliers et complexes à étudier[49]. Certains auteurs voient même trois zones et distinguent le comportement au voisinage du point de vitesse max de ceux des parties intérieure et extérieure.
22
a b
Figure 1.15 : Représentation schématique du dispositif à fente utilisé pour former un jet de paroi plan bidimensionnel (a) et profil de vitesse typique d’un jet de paroi [50] (b).
1.1.3.2. Propriétés caractéristiques du jet de paroi
Comme nous l’avons déjà évoqué, les propriétés des jets de paroi sont moins universelles que celles des jets libres. Chaque configuration (forme de la paroi, vitesse du jet, rugosité de la paroi…) modifie le comportement de façon très importante. Les deux couches du jet multiplient les configurations et rendre la description complexe. On peut cependant extraire quelques comportements généraux.
1.1.3.2.1.Évolution de la vitesse centrale
Comme dans les jets libres, la vitesse centrale se définit dans chaque profil de vitesse comme la vitesse maximale du profil.
Figure 1.16 : Représentations logarithmiques des variations de la vitesse maximale d’un jet de paroi plan sur surface plane en fonction de la distance à la buse [50]. Comme dans les jets libres, on peut remarquer que la vitesse en sortie de buse reste constante pendant un certain temps avant de commencer à décroitre. On ne parle pas de cône de potentiel pour les jets de paroi cependant le comportement est similaire. Toujours comme dans les jets libres, à une certaine distance de la fente, la vitesse
23
adimensionnée adopte une loi de décroissance en . La valeur de α fait cependant débat. Certains affirment que α=-0,5 (comme dans les jets libres), d’autre annonce des valeurs différentes comme sur l’exemple présenté figure 1.16 où l’auteur [50] trouve une valeur de -0,6.
1.1.3.2.2. Évolution de la forme des profils de vitesse
Contrairement aux jets classiques, il semble difficile de trouver une loi d’échelle dans les jets de paroi. Plusieurs essais ont été faits pour identifier une zone de similarité, mais le résultat n’est pas satisfaisant. Difficile de donner également une forme mathématique universelle aux profils de vitesse. Comme ils sont le résultat de l’évolution de deux couches aux comportements distincts le nombre de combinaisons est très important. Cependant, il reste possible de trouver une loi d’échelle pour chaque couche, mais pas pour les deux (ou les trois) couches à la fois [34] [45]. On parle alors de similarité incomplète.
Sur la figure 1.17 on peut voir le résultatde l’adimensionnement des profils de vitesse par la demi-largeur supérieure figure 1.17a. Dans ce cas, les profils de vitesses se superposent parfaitement, mais uniquement dans la partie haute. Si au contraire on adimensionne les profils par la demi-largeur inférieure figure 1.17b, alors les profils sont similaires dans la partie inférieure mais pas dans la partie supérieure.
a b
Figure 1.17 : Courbes de l’adimensionnement des profils de vitesse par la demi-largeur supérieure (a) et la demi-largeur inférieure [50] (b).
1.1.3.2.3. Évolution de la demi-largeur
Les variations de la demi-largeur sont un autre bon exemple de la complexité des jets de paroi. Contrairement aux jets classiques, il existe deux demi-largeurs différentes : la demi-largeur extérieure , et la demi-largeur intérieure , .
Il existe dans la littérature beaucoup plus de données sur , . En effet, dans la plupart des expériences, la résolution près de la paroi est insuffisante pour déterminer correctement la forme du profil en dessous du maximum et donc , même si cette coordonnée existe bien évidemment. (voir Figure 1.17a):
24
Figure 1.18 : Variation de la demi-largeur extérieure adimensionnée d’un jet de paroi plan en de la distance à l’orifice pour différents nombres de Reynolds [51].
Sur la figure 1.18, on peut voir que la demi-largeur extérieure croît avec la distance dès la sortie de buse. Comme dans les jets libres, la croissance est linéaire et semble peu dépendante du nombre de Reynolds. Cependant, on observe que le taux de croissance de la couche est bien inférieur à celui des jets libres.
1.1.4. Jet impactant classique
Quelques propriétés des jets libres viennent d’être décrites dans la section précédente, nous allons maintenant dire quelques mots sur les jets impactant.
Un jet impactant est un jet libre qui frappe une surface. Ils sont donc sensibles aux mêmes paramètres que les jets libres. Ainsi, la géométrie de la buse, la viscosité sont des paramètres influents. À ces paramètres, il faut ajouter tous ceux liés à l’impact comme par exemple : le type de surface libre ou rigide, la rugosité de la surface, sa courbure, l’angle et la distance entre la buse d’injection et la surface. La figure 1.19 montre trois exemples de jets ronds impactant : un plan de façon perpendiculaire, une surface convexe ou encore une surface concave.
a b c
Figure 1.19 : Jet impactant (a) sur une plaque, (b) sur une paroi convexe, (c) sur une paroi concave [52].
Une synthèse bibliographique des principales études réalisées sur les jets impactant a été faite par Gauntner et al. [53]. Ils y présentent une large gamme de résultats théoriques et expérimentaux sur l’aérodynamique du jet impactant.
Dans cette introduction, nous ne retiendrons de ce travail de synthèse que les quelques informations nécessaires à l’analyse des jets impactants EHD que nous présentons
25
dans ce document. Nous nous limitons donc aux jets qui impactent une surface placée perpendiculairement à leur l’axe de symétrie et à l’influence de la distance buse /plaque que nous appelons .
Concernant la structure du jet impactant, certains auteurs comme Gauntner et al. [53] définissent 4 parties. De façon totalement arbitraire, nous préférons ici la description proposée par Deshpande et Vaishnav [54] distinguent seulement trois zones (figure 1.20c).
Une zone de régime de jet pseudo-libre : Cette zone proche de la buse prend la forme d’un jet libre classique. L’écoulement n’y est pas significativement influencé par la surface d’impact. Il peut être subdivisé selon les cas en une zone potentielle, une zone de transition et une zone pleinement développée si l’impact intervient suffisamment loin de la buse.
Une région d’impact : C’est la zone dans laquelle la présence de l’obstacle
commence à se faire sentir. Elle correspond à la zone de déflexion. On y observe une augmentation de la turbulence, une augmentation de la pression et un changement de direction du fluide. La vitesse axiale du jet diminue rapidement au fur à mesure qu’il
s’approche du pointde stagnation et jusqu’à devenir nulle au voisinage de la plaque.
Une région de jets de paroi : Après l’impact, le jet s’éloigne du point d’impact en longeant la paroi. L’écoulement dévié forme un jet qui se développe le long de la paroi. Les fluctuations de pression deviennent rapidement indépendantes de la position de l’obstacle, ce qui est caractéristique du jet impactant développé [55]. Les jets impactant peuvent également être classés en trois types selon que l’impact intervient dans la zone potentielle, (figure 1.20a), dans la zone transitionnelle (figure 1.20b) ou encore dans la zone développée (figure 1.20c) du jet.
Les deux premiers types de jet sont principalement utilisés pour les échanges thermiques. Ces jets sont principalement utilisés dans les applications de refroidissement de surface. Le jet n’a pas le temps de se développer complètement avant de heurter la plaque. Kataoka [56] a prouvé que la distance buse/plaque optimale, c’est-à-dire celle qui permet le plus grand échange thermique entre le jet et plaque se situe à l’endroit où l’intensité turbulente axiale atteint son maximum. Pour les jets cylindriques, ce maximum est situé entre = 8 et =10. Ceci explique pourquoi les jets impactants sont généralement étudiés pour des distances d’impact inférieures à 10 diamètres.
Les jets impactants développés sont constitués d’un jet libre et d’un jet impactant (figure 1.20c).

![Figure 1.4 : Décroissance de la vitesse moyenne centrale adimensionnée d’un jet plan de différents ratios (a), géométrie de la buse associée[4] (b)](https://thumb-eu.123doks.com/thumbv2/123doknet/8008501.268387/27.892.143.703.376.660/figure-décroissance-vitesse-moyenne-centrale-adimensionnée-géométrie-associée.webp)
![Figure 1.5 : Décroissance la vitesse moyenne centrale adimensionnée d’un jet rond pour les différentes géométries de sortie de buse (a), géométrie de la buse associée [6]](https://thumb-eu.123doks.com/thumbv2/123doknet/8008501.268387/28.892.172.715.179.453/figure-décroissance-vitesse-centrale-adimensionnée-géométries-géométrie-associée.webp)