Contribution a l'analyse des méthodes de répartition optimale des puissances dans un réseau de transport d'énergie
131
0
0
Texte intégral
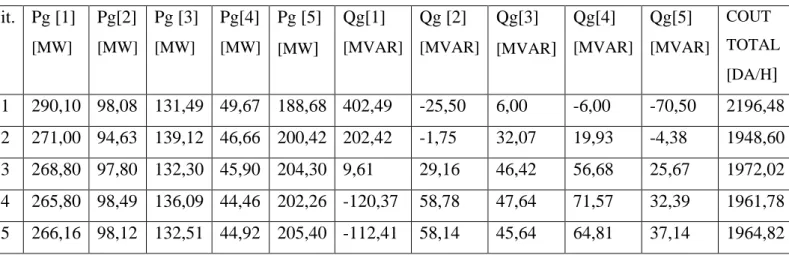
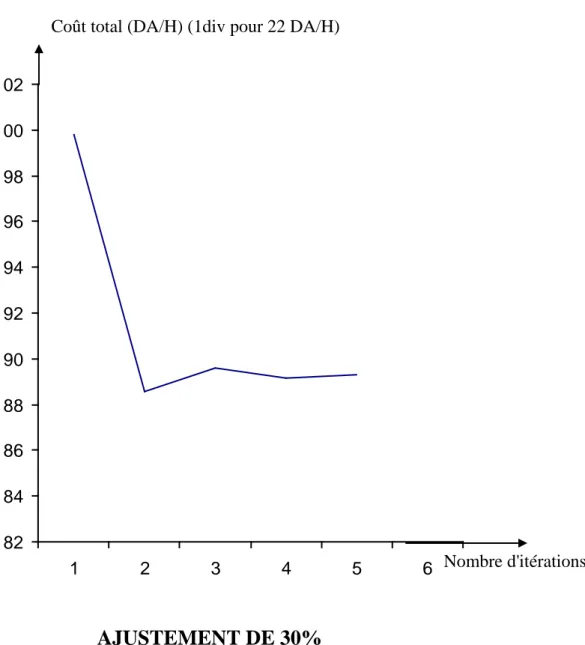
Figure
+7
Outline
Documents relatifs