mm UNIVERSITEDE
t£l SHERBROOKE
Faculte de genieDepartement de Genie Mecanique
UNITES D'ACTIONNEURS-CAPTEURS
COLOCALISEES-DUALES POUR LE CONTROLE
ACTIF VIBRATOIRE DECENTRALISE
Memoire de maitrise en genie Specialite : genie mecanique
Yvonnick BRUNET
1*1
Library and
Archives Canada
Published Heritage
Branch
395 Wellington Street Ottawa ON K1A0N4 CanadaBibliotheque et
Archives Canada
Direction du
Patrimoine de I'edition
395, rue Wellington Ottawa ON K1A0N4 CanadaYour file Votre reference ISBN: 978-0-494-42937-2 Our file Notre reference ISBN: 978-0-494-42937-2
NOTICE:
The author has granted a
non-exclusive license allowing Library
and Archives Canada to reproduce,
publish, archive, preserve, conserve,
communicate to the public by
telecommunication or on the Internet,
loan, distribute and sell theses
worldwide, for commercial or
non-commercial purposes, in microform,
paper, electronic and/or any other
formats.
AVIS:
L'auteur a accorde une licence non exclusive
permettant a la Bibliotheque et Archives
Canada de reproduire, publier, archiver,
sauvegarder, conserver, transmettre au public
par telecommunication ou par Plntemet, prefer,
distribuer et vendre des theses partout dans
le monde, a des fins commerciales ou autres,
sur support microforme, papier, electronique
et/ou autres formats.
The author retains copyright
ownership and moral rights in
this thesis. Neither the thesis
nor substantial extracts from it
may be printed or otherwise
reproduced without the author's
permission.
L'auteur conserve la propriete du droit d'auteur
et des droits moraux qui protege cette these.
Ni la these ni des extraits substantiels de
celle-ci ne doivent etre imprimes ou autrement
reproduits sans son autorisation.
In compliance with the Canadian
Privacy Act some supporting
forms may have been removed
from this thesis.
Conformement a la loi canadienne
sur la protection de la vie privee,
quelques formulaires secondaires
ont ete enleves de cette these.
While these forms may be included
in the document page count,
their removal does not represent
any loss of content from the
thesis.
Canada
Bien que ces formulaires
aient inclus dans la pagination,
il n'y aura aucun contenu manquant.
Resume
Le contrdle actif de bruit s'oppose au contrSle passif (qui consiste en des traitements acous-tiques) et a l'avantage de travailler mieux en basses frequences contrairement au controie passif. Cette technique necessite la distribution de nombreux actionneurs PZTs et de capteurs PVDFs de type piezoelectriques sur une structure de type plaque pour controler les vibrations. A partir des informations des capteurs, le controleur genere les commandes aux actionneurs. Dans le cas ou le controleur traite toutes les mesures des capteurs pour generer les commandes aux action-neurs, alors il est de type centralise, alors que le contrdleur decentralise aborde dans ce memoire consiste a avoir un contrdleur independent pour chaque couple de capteur-actionneur. Le controie decentralise est interessant par rapport au controie centralise, car il est capable de contrdler les vibrations m&ne si une unite ne fonctionne plus, mais a l'inconvenient d'etre instable sur certaines plages de frequences. Une condition de stabilite est d'assurer la passivite du systeme a controler, pour cela il faut la colocalisation des unites (les actionneurs a la meme place des capteurs) et la dualite des variables mesurees par rapport aux variables controlees (le produit des variables doit etre ainsi egal a une puissance (J.s 1) ) . La double condition de colocalisation et dualite est respec-tee du moment qu'une seule entite fait office d'a,ctionneur-capteur (concept du sensoriactuator). Meme en respectant la passivite du systeme, certaines plages de frequences ne peuvent pas etre contrdlees en experimental. II faut done connaitre la fonction de transfert de la plaque entre les capteurs et les actionneurs et trouver une matrice de controie capable de rendre le systeme stable sur toute la plage de frequences [0— 800]//z notamment avec l'algorithme du meilleur dephasage qui consiste a faire une rotation des valeurs propres du systeme. Cette fonction de transfert est aussi l'admittance mecanique du systeme car l'actionneur est commande par une tension U et le capteur mesure une quantite de charges q au cours du temps (ceci cree un courant I ) . Ce memoire vise done la conception d'unites actionneurs-capteurs ou sensoriactutor PZTs pour le contrdle actif decentralise de vibration des structures planes. Le premier objectif est de faire une preuve de concept du modele vibratoire de la plaque avec les unites capteurs-actionneurs. Le second objectif est de faire du controie actif decentralise avec 7 unites actionneurs-capteurs en vis-a-vis sur une plaque. Dans le chapitre du modele theorique, chaque unite est modelisee par un mo-dele electrique equivalent incluant le couplage electro-mecanique du piezoelectrique et le momo-dele modal de vibration de plaque. Ce modele permet de calculer l'admittance mecanique vue par
l'unite de maniere theorique. II permet aussi de concevoir l'electronique de commande du PZT et l'electronique de mesure de la deformation (amplificateur de tension ou de charge) du PVDF ou du PZT en mode capteur. A partir de ces deux montages electroniques de commande du PZT et de mesure de la deformation en amplificateur de charge, l'electronique de conditionnement du sensoriactuator en est deduit. Ces electroniques permettent aussi la formulation des admittances mecaniques estimees. Ces admittances sont comparees aux admittances simulees dans differentes configurations actionneurs capteurs : PZT-PVDF, PZT-PZT et sensoriactuator PZT. Les admit-tances mecaniques theorique et experimentale dans les configurations PZT-PVDF et PZT-PZT coincident en ajustant la phase et le gain. Par contre, dans le cas de la configuration du senso-riactuator, il faut reajuster la valeur de la capacite dans les compensations electroniques pour obtenir des admittances mecaniques simulees et experimentales qui se ressemblent. Le controle actif est implante en experimental pour pouvoir controler toute la plage de frequences [0 — 800]//2 avec les 7 unites PZT-PVDFs. Les tests de stabilites demontrent les plages de frequences non contrdlables par la matrice de contrdle identite, par l'algorithme du gradient et par 1'algorithme de Newton-Raphson. Ces algorithmes n'arrivent pas a stabiliser le systeme, alors que l'algorithme du meilleur dephasage permet de controler toute la plage de frequences [0 — 800] Hz.
Remer elements
Je tiens a remercier messieurs Alain Berry et Philippe Micheau qui m'ont donrie la possibilite de faire une maitrise au sein du Laboratoire d'Acoustique de l'Universite de Sherbrooke (GAUS). lis m'ont consacr6 beaueoup de temps et d'energie pour la reussite de cette maitrise.
Je tiens aussi a remercier le personnel et les etudiants du GAUS pour leur aide et leur soutien tout au long de mes travaux de maitrise. Je remercie madame Chantale Simard et Monsieur Yann Pasco qui m'ont aide pour tout ce qui a trait a l'experimentation et monsieur Brian Driscoll pour tout ce qui touche a l'informatique.
Enfin, je tiens a remercier mes parents qui m'ont donne tout l'appui moral et financier pour poursuivre mes etudes a l'etranger.
Nomenclature
A D 6 2 2 : Analog Devices 622.
C A N : Convertisseur Analogique Numerique. C N A : Convertisseur Numerique Analogique. D S P : Digital Signal Processing.
d S P A C E : Plateforrne utilisee pour faire de l'acquisition de donnee en ternps reel. G A U S : Groupe d'Acoustique de l'Universite de Sherbrooke.
M a t l a b : Logiel de calcul sur ordinateur. M D O F : Multi-Degree Of Freedom.
M I M O : Multiple Inputs Multiple Outputs. O D E : Ordinary Differential Equation. O P A 4 5 2 : OPerational Amplifier 4 5 2 . P V D F : PolyVinyliDene Fluoride. P Z T : Plomb Zirconate Titanate.
S i m u l i n k : Logiciel d'extension de Matlab pour faire des simulations schematiques. S I S O : Single Input Sngle Output.
S P R : Strictly Positive Real. U D S : Universite D e Sherbrooke.
Symboles
(,)H : hermitien. (.)* : conjugue.
V : operateur bi-laplacien. <8> : produit de convolution.
0 : coefficient de retenu du controleur. S : distribution de Dirac.
Ax : deplacement de l'extremite libre du piezoelectrique (m). 77 : facteur de perte de la plaque.
7m : nombre d'onde dans la direction de x de la longueur Lx de la plaque ( m- 1) . 7„ : nombre d'onde dans la direction de y de la largueur Ly de la plaque (m~1). Xi : valeurs propres.
7 : force induit dans la plaque par un actionneur piezoelectrique (N). !h[ : fonctionnelle de Hamilton du systeme plaque.
M •: moment de flexion induit dans la plaque par un actionneur piezoelectrique (N). %. : effort induit dans le plan de la plaque par un actionneur piezoelectrique (JV.m- 1). T : energie cinetique du systeme.
•V : energie potentielle ou energie de deformation. W : travail d'es forces exterieures.
H : coefficient de convergence du controleur. v : vitesse du piezoelectrique (m.s-1). up : coefficient de Poisson de la plaque.
vpz •" coefficient de Poisson du pi6zoelectrique PZT.
Urmn '• pulsations propres des modes d'extension de la plaque (rad.s"1). wo •' frequence angulaire de la porteuse (rad.s~l).
(f>opt : angle de rotation optimal (rad). p : masse volumique de la plaque (kg.m~'6). a : contrainte du piezoelectrique (N.m~2).
apz '• contrainte du piezoelectrique PZT (N.-mT2). e : deformation du piezoelectrique.
eo : constante liee a l'extension.
e£v : deformation dans le capteur piezoelectrique PVDF. slpz : deformation libre de l'actionneur.
ipd : phase du signal temporel mesure par le capteur yd (t) (rad).
<pa : phase du signal temporel discretise genere par le controleur ua (k) (rad).
(ps : phase du signal temporel mesure par le capteur et amplifie par l'amplificateur AD622 Vs (t) (rad).
fYs(k) '• phase du signal frequentiel Ys (rad). Vu°ik) '• phase du signal frequentiel Ua (rad). q : amortissement visqueux de la plaque.
& : matrice de permittivite dielectrique a contrainte constante (F.m~l). £,mn :coefncent d'amortissement du pole smn.
a : rapport de transformation du transformateur du piezoelectrique (Cm-1). ac : coefficient relie au coefficient de convergence p, mais aussi a la matrice W. amn : amplitudes modales des ondes de flexion.
o-rmn '• amplitudes modales des ondes d'extension de la plaque. A : matrice utilisee pour l'analyse de stabilite.
Aa : amplitude du signal temporel discretise genere par le contrdleur ua (k) (V). Ad : amplitude du signal temporel mesure par le capteur yd (t) (V).
As : amplitude du signal temporel ys (t) (V).
b : coefficient relie a.u coefficient de convergence p du contrdleur. Kmn '• amplitudes modales des ondes d'extension de la plaque. B : matrice utilisee pour l'analyse de stabilite.
C : matrice de contrdle.
Ceq : inverse de la raideur du piezoelectrique (m.N~l). Cik : tenseur des coefficients elastiques (N.m~2). Cmn : matrice d'amortissement de la plaque (rad.s-1).
Cp : capacite du piezoelectrique utilisee pour le capteur et Pactionneur (F). C% : variable choisie pour simplifier l'ecriture de at (N.m~l).
Cu : variable choisie pour simplifier l'ecriture de M (N).
C\ : capacite de decouplage de type ceramique plac6e au niveau des alimentations ±12 de Tamplificateur OPA452 (F).
C2 • capacite de decouplage de type ceramique placee au niveau des alimentations ±12 de l'amplificateur OPA452 ( F ) .
C3 : capacite de decouplage de type electrolytique placee au niveau des alimentations ±12 de Tamplificateur OPA452 (F).
C4 : capacite de decouplage de type electrolytique placee au niveau des alimentations ±12 de l'amplificateur OPA452 (F).
C7 : capacite de decouplage de type electrolytique placee au niveau des alimentations ±12 de l'amplificateur AD622 (F).
Cg : capacite de decouplage de type ceramique placee au niveau des alimentations ±12 de l'amplificateur AD622 (F).
C9 : capacite de decouplage de type electrolytique placee au niveau des alimentations ±12 de ramplificateur AD622 (F).
C10 : capacite de decouplage de type ceramique placee au niveau des alimentations ±12 de ramplificateur AD622 (F).
Cs : capacite permettant d'eliminer les parasites provenant des hautes frequences dans l'am-plificateur OPA452 (F).
CF • capacite du filtre passe bas Ha de l'amplificateur OPA452 (F). CPV : capacite du piezoelectrique PVDF (F).
Cpz : capacite du piezoelectrique PZT (F). d(t) : excitation primaire dans le domaine temporel.
dji : matrice de couplage piezoelectrique (m,.V~1 ou CAT- 1). D : deplacement electrique du piezoelectrique (C.m~2). D? : rigidite de flexion {Pa.rrfi).
Dm : excitation prirnaire dans le domaine frequentiel. e^k '• couplage piezoelectrique en contrainte (C.m~2). E : champ electrique du piezoelectrique (V.m~^). Ep : module d'Young du materiau de la plaque (Pa). Epz '• module d'Young du piezoelectrique PZT (Pa). /o : frequence de travail on frequence de porteuse (Hz). fca : frequence de coupure de l'amplificateur OPA452 (Hz).
fcn : frequence de coupure du nitre passe bas servant a l'analyse du signal if (t) (Hz). fcs : frequence de coupure de l'amplificateur AD622 (Hz).
fe : frequence d'echantillonnage du systeme (Hz). F : force exerce par le piezoelectrique (N). Fmn '• vecteur des forces externes mo dales (N). Ga : gain de l'amplificateur OPA452.
Gs : gain de l'amplificateur AD622. Gmn : rapport de transformation de Tp-h : epaisseur de la plaque (m).
han : reponse impulsionnelle de la fonction de transfert Han du filtre passe bas du bloc d'analyse.
/?;' : reponse impulsionnelle de la fonction de transfert Hs de l'amplificateur AD622. hp : epaisseur du piezoelectrique (m).
hpy '• epaisseur du piezoelectrique PVDF (m). hpz '• epaisseur du piezoelectrique PZT (m). H(t) : fonction de transfert de la structure plane. H(x) : fonction de Heaviside.
Ha : fonction de transfert de l'amplificateur OPA452.
Han : fonction de transfert de l'a,mplifica.teur du filtre passe bas du bloc d'analyse. Hcr : fonction de transfert d'entree de l'amplificateur OPA452.
Hs : fonction de transfert de l'amplificateur AD622. I : courant mesuree par le piezoelectrique (A).
lc : courant capacitif aux bornes de la capacite du piezoelectrique (A).
/ ' : courant total mesure par le capteur piezoelectrique (A).
J : critere quadratique qui doit etre minimise pour obtenir les commandes optimales Uap t-K : matrice intervenant dans la matrice de contr6le C.
Keq : raideur equivalente du piezoelectrique (JV.m- 1). Kmn : matrice de raideur de la plaque (N.m~l). K" : variable choisie pour siraplifier l'ecriture de EQ et c. K.f : variable choisie pour simplifier l'ecriture de eo et c. Kl : variable choisie pour simplifier l'ecriture de eo et c.
Kv : variable choisie pour simplifier l'ecriture de l'equation du mouvement dans les ondes longitudinales (N.m~l). Lx : longueur de la plaque (m). Ly : largeur de la plaque (m). Lax : longueur du piezoelectrique PZT (m). Lav : largeur du piezoelectrique PZT (m). Lcx : longueur du piezoelectrique PVDF (m). Lcy : largeur du piezoelectrique PVDF (m). Mmn : matrice de masse de la plaque (kg). Mp : masse totale de la plaque (kg). N ; nombre d'unite actionneurs-capteurs. N(s) : numerateur du controleur frequentiel C.
q : quantite de charge totale mesuree par le capteur (C). Qflexion '• quantite de charge mesuree par le capteur (C). Qiong '• quantite de charge mesuree par le capteur (C). r : variable choisie pour simplifier l'ecriture de eo et c. R : matrice de ponderation de la commande.
Ra : resistance aux bornes de l'amplificateur AD622 ( 0 ) . Rmn : residus des modes de la plaque.
Rp : resistance intervant dans le gain Ga de l'amplificateur OPA452 (ft). Ra : resistance intervant dans le gain Ga de l'amplificateur OPA452 (fi). R\ : resistance intervant dans le gain G8 de l'amplificateur AD622 (Q). Rs : resistance a l'entree des pins 2 et 3 de l'amplificateur AD622 (ft).
$mn '• poles complexes des modes de la plaque. S : surface de la plaque selon le plan (x,y) (m2).
Sj%. : matrice de la souplesse mecanique ou de compliance piezoelectrique a champ electrique constant {m2.N~l).
Spy • surface de ce capteur PVDF (m2). t : variable de temps (s).
Te : periode d'echantillonnage du systeme (s).
Tv : transformateur qui permet de passer de la vitesse rnodale vmn a la vitesse physique v. TF : transformateur qui permet de passer de la force physique F a la force modale Fmn. u : champ de deplacement (m).
u(t) : perturbation secondaire dans le domaine temporel.
ua (k) : signal temporel discretise provenant de la synthese du signal Ua (k).
ua (t) : signal temporel resultant de la conversion nurnerique analogique (CNA) du signal discretise ua (k).
u° (t) : signal temporel provenant du signal ua (t) nitre par 1'amplificateur OPA452. U : tension aux bornes du piezoelectrique (V).
Ua (k) : signal frequentiel discretise que genere le contrdleur (V). Ud : tension a l'entree des pins 2 et 3 de 1'amplificateur AD622 (V).
Ud0 designe la tension sans amplificateur AD622 aux bornes du capteur PVDF (V). Uf : tension a l'entree de 1'amplificateur OPA452 a l'actionneur j (V).
Uj : tension a la sortie de 1'amplificateur OPA452 a l'actionneur j (V). Um : tension mecanique resultant d'une perturbation prirnaire (V). jjmo ^ . si gn a} frequentiel resultant de la modulation du signal Ua (t) (V). Uopt '• commande optimale generee pour minimier le cirtere quadratique J (V).
Ur : tension a l'entree des pins 2 et 3 de 1'amplificateur AD622 lorsque celui-ci est utilise pour le sensoriactuator (V).
IIs : tension de sortie de 1'amplificateur AD622 (V). Ui(x,y) : fonction propre des ondes d'extension de la plaque. U2(x,y) '• fonction propre des ondes d'extension de la plaque. V : volume de la plaque (m3).
vpz : coefficient de Poisson du piezoelectrique PZT. w : deplacement transverse de la plaque (rn).
W : matrice de ponderation de la commande.
Wmn : modes propres des ondes de flexion de la plaque. %PZT '• abscisse du centre de l'actionneur (rn).
XPVDF '• ordonnee du centre de l'actionneur (rn).
x\ : premiere coordonnee du piezoelectrique selon la direction x (m). x-2 : deuxieme coordonnee du piezoelectrique selon la direction x (rn). yd (t) : signal temporel mesure par le capteur.
yde (t) : signal temporel resultant de la demodulation du signal ys (t).
y9 (k) : signal temporel discretise par le convertisseur analogique numerique CAN du signal Vs (t).
ys (t) : signal temporel mesure par le capteur et amplifle par l'amplificateur AD622. y\ : premiere coordonnee du piezoelectrique selon la direction y (m).
t/2 : deuxieme coordonnee du piezoelectrique selon la direction y (m). ypzT '• abscisse du centre du capteur (rn).
VPVDF '• ordonnee du centre du capteur (m).
Y : signal mesure par le capteur dans le domaine frequentiel. Ye : admittance equivalente physique de la plaque.
Yijm : admittance mecanique de la plaque de l'actionneur j et du capteur i. Ym : admittance physique de la plaque (m.s~l.N~1).
Ymn : admittance modale de la plaque ( m . s- 1 J V- 1) .
Ys (k) : signal frequentiel discretise provenant de l'analyse du signal ys (k). Zm : impedance mecanique de la plaque (V.A"1).
Zmn : impedance modale de la plaque (N.s.m~1).
Zrmn : rapport des amplitudes modales brmn par rapport a celles des amplitudes modales
®rmn •
Table des matieres
Chapitre 1 I n t r o d u c t i o n 1 1.1 Mise en contexte 1 1.2 Expose de la problematique 1
1.3 Methodologie, presentation du memoire 3
Chapitre 2 E t a t d e s connaissances 5
2.1 Introduction 5 2.2 Le controle actif de vibration de plaque 5
2.3 Les deux types de structure du controle actif 6
2.3.1 Le controleur par anticipation 6 2.3.2 Le controleur par retroaction 8
2.4 Le contrdleur frequentiel 9 2.4.1 L'implantation du controleur 9
2.4.2 Le systeme MIMO 9 2.4.3 L'algorithme adaptatif 10
2.5 Analyse de stabilite 12 2.6 Les capteurs et les actionneurs 15
2.6.1 Les piezoelectriques ' 15 2.6.2 Avantages des actionneurs PZTs 16 2.6.3 Avantages des capteurs PVDFs 16 2.6.4 Modelisation du couplage electro-rnecanique du piezoelectrique PZT sur
des plaques 17 2.7 L'admittance Y 19 2.8 Le sensoriactuator 21 2.9 Conclusion 24 Chapitre 3 M o d e l i s a t i o n d u couplage d y n a m i q u e entre plaque et t r a n s d u c t e u r s
piezoelectriques 25 3.1 Introduction 25 3.2 Le transducteur piezoelectrique 26
3.2.2 Effet inverse : actionneur PZT 26 3.2.3 Effet direct : Charge d'un film piezoelectrique colle sur une plaque . . . . 31
3.2.4 Le modele electrique du piezoelectrique 33 3.3 Modele vibratoire de plaque excitee par un actionneur PZT 41
3.3.1 Modele vibratoire des ondes de flexion 41 3.3.2 Modele vibratoire des ondes longitudinales 47 3.3.3 Modele electrique de la plaque excitee par un actionneur PZT 52
3.4 Reponse vibratoire de la plaque mesuree par le capteur piezoelectrique 57
3.4.1 La quantite de charges q 57 3.4.2 Modele electrique de couplage plaque-capteur piezoelectrique 59
3.4.3 Passivite du systeme 61 3.5 Electronique de conditionnement 64 3.5.1 L'amplificateur de tension 64 3.5.2 L'amplificateur de charge 65 3.5.3 Le sensoriactuator 66 3.6 Conclusion 68 Chapitre 4 Le m o n t a g e e x p e r i m e n t a l 70 4.1 Introduction 70 4.2 Commander l'actionneur 71 4.2.1 Choix de l'amplificateur 71 4.2.2 La fonction de transfert de l'amplificateur OPA452 72
4.2.3 Les capacites de decouplage 73 4.2.4 Le gabarit de l'amplificateur OPA452 73
4.3 Mesurer le signal 74 4.3.1 Choix de l'amplificateur 74
4.3.2 La fonction de transfert de ramplificateur AD622 75
4.3.3 Le gabarit de l'amplificateur AD622 77 4.4 Le systeme d'acquisition de dormees dSPACE 78
4.4.1 Le fonctionnement du systeme dSPACE 78
4.4.2 Le bloc d'analyse 81 4.4.3 Le bloc de synthese 86 4.4.4 Le contr61eur 89
4.5 Conclusion 92 Chapitre 5 C o m p a r a i s o n entre le m o d e l e theorique et les resultats e x p e r i m e n
-t a u x 9 4 5.1 Introduction 94
5.2 Configuration experimentale 94
5.3.1 Admittances mecaniques Ym directes et croisees des paires PZT — PVDFs 96
5.3.2 Admittances mecaniques Ym croisees des paires PZT — PZTs 101
5.3.3 Admittances mecaniques Ym directes et croisees du sensoriactuator . . . 107
5.4 Le contrdle actif decentralise sur 7 unites PZT — PVDFs 117 5.4.1 Principe de Palgorithme du meilleur dephasage K = e^ 118
5.4.2 Illustration de la stabilite 120
5.5 Conclusion 122
Chapitre 6 Conclusion generate 124
Liste des tableaux
4.1 Valeurs des differents composants electriques pour l'ainplificateux 73 4.2 Valeurs des differents composants electriques pour l'ampliricateur 77 5.1 Les positions du centre des actionneurs PZTs et des capteurs PVDFs 95 5.2 Les caracteristiques de la plaque d'aluminium en appui simple 95 5.3 Les caracteristiques des actionneurs PZTs et des capteurs PVDFs 96
Liste des figures
1.1 Schema du controle actif centralise 2 1.2 Schema du controle actif decentralise 2 2.1 Schema general du principe du controle actif centralise ou decentralise 6
2.2 Principe du contrdleur par anticipation 7 2.3 Diagramme du contrdleur par anticipation 7 2.4 Principe du contrdleur par retroaction 8 2.5 Diagramme du contrdleur par retroaction 8 2.6 Bloc diagramme du contrdleur frequentiel 9 2.7 Schema electrique equivalent du piezoelectrique en ID 17
2.8 Schema electrique equivalent de la plaque pour 1 seul mode 18 2.9 Schema electrique equivalent du couplage electro-mecanique des PZTs sur une
plaque 19 2.10 Schema bloc du systeme decentralise 20
2.11 Schema bloc de l'electronique de contrdle avec l'unite PZT-PVDF. 21 2.12 Schema bloc de l'electronique du contrdle avec l'entite sensoriactuator 21
2.13 Schema de principe du sensoriactuator 22 2.14 Schema de principe du sensoriactuator avec le compensateur adaptatif numerique. 23
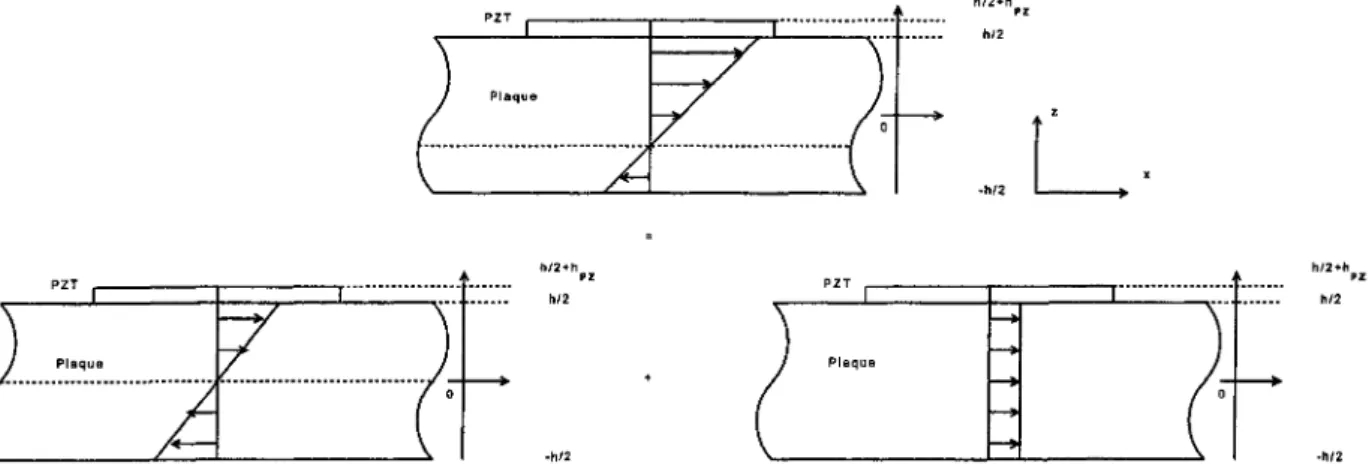
3.1 Deformations du PZT non contraint et excite par une tension U 27 3.2 Deformations de la plaque avec un PZT colle et excite par une tension U 28
3.3 Decomposition des deformations asymetriques en deformations de flexion pure et
d'extension pure 29 3.4 Deformations de la plaque, et du PVDF avec un actionneur PZT colle et excite
par une tension U 32 3.5 Modelisation du piezoelectrique avec les grandeurs electromecaniques 34
3.6 Modelisation mecanique en ID du piezoelectrique suivant x 34
3.7 Schema electrique du modele piezoelectrique 39
3.8 Modele electrique du transformateur 39 3.9 Modele electrique du piezoelectrique avec le transformateur 40
3.11 Representation du mouvernent modal par un systeme masse-ressort-amortisseur
excite par un moment Mmn 54
3.12 Representation du systeme electrique masse-ressort-amortisseur 54 3.13 Schema electrique modal de la plaque excitee par un actiomieur PZT. 55 3.14 Schema electrique modal de la plaque excitee par un actionneur PZT. 56 3.15 Schema electrique modal du couplage de la plaque avec un actionneur PZT et un
capteur PVDF. 59 3.16 Schema electrique modal du couplage de la plaque avec un actionneur PZT et un
capteur PVDF. 60 3.17 Schema electrique modal du couplage de la plaque avec un actionneur PZT et un
capteur PVDF. 60 3.18 L'admittance mecanique Ym en amplitude et en phase en fonction de la frequence
et sa representation dans le plan de Nyquist 63 3.19 Modele electrique modal equivalent de l'identification de la plaque 64
3.20 Modele modal du capteur avec l'amplificateur de tension 65 3.21 Principe du sensoriactuator PZT en identification 66 3.22 L'admittance mecanique Ym en trait pointille et l'admittance total Yl en trait
plein dans le plan de Nyquist 67
3.23 Les parties imaginaires des differentes admittances Ym, Y*' et Yc 68
4.1 Chaine de mesure 71 4.2 Schema electrique de ramplificateur OPA452 72
4.3 Gabarit de l'amplificateur OPA452 en amplitude et en phase en fonction de la
frequence 74 4.4 Schema electrique de l'amplificateur AD622 75
4.5 Gabarit de l'amplificateur AD622 en amplitude et en phase en fonction de la
frequence 78 4.6 La schematisation du controleur frequentiel sous dSPACE. 79
4.7 Representation du module d'analyse 81 4.8 Representation d'un cosinus d'amplitude 1, de frequence /o dans le domaine
fre-quentiel 82 4.9 L'effet de la demodulation sur un cosinus d'amplitude 1, de frequence /o dans le
domaine frequentiel 83 4.10 Le gabarit en amplitude et en phase en fonction de la frequence du filtre passe-bas
utilise dans le bloc d'analyse 84 4.11 La partie filtrage du bloc d'analyse du signal 84
4.12 Schema simulink de l'analyse implementee dans dSPACE 85 4.13 Schema Simulink du filtre passe-bas implante dans dSPACE. 86
4.15 Le phaseur de commande Ua(t) dans le domaine frequentiel 87 4.16 L'effet de la modulation sur le phaseur de commande U(t) dans le domaine
fre-quentiel 87
4.17 La commande finale ua(t) dans le domaine frequentiel 88
4.18 Schema Simulink de synthese implante dans dSPACE. 89
4.19 Representation du module de contrdle 91 4.20 Schema Simulink du controleur implante dans dSPACE 92
5.1 Disposition des actionneurs PZTs et les capteurs PVDFs sur la plaque 95 5.2 Schema electrique de principe de la chaine de montage utilise pour calculer
l'ad-mittance mecanique Ym 97
5.3 Comparaison de l'admittance mecanique Y™ direct du modele et de la chaine
experimentale 99 5.4 Comparaison de l'admittance mecanique Y^f croisee du modele et de la chaine
experimentale 100 5.5 Test de passivite des admittances Yff 101
5.6 Schema electrique de principe de la chaine de montage utilise pour calculer
l'ad-mittance mecanique Ym 102
5.7 Comparaison de l'admittance mecanique Yjrf croisee du moddle et de la chaine
experimentale 104 5.8 Comparaison de l'admittance mecanique K/f croisee du modele et de la chaine
experimentale avec RAD — 1&£2 106 5.9 Comparaison de l'admittance mecanique Yff croisee du modele et de la chaine
exp6rimentale avec RAD = 5&Q : 106
5.10 Schema electrique de principe de la chaine de montage utilise pour calculer
l'ad-mittance mecanique Ym 108
5.11 Comparaison de l'admittance mecanique 1^7 croisee du modele et de la chaine
experimentale 110 5.12 Comparaison de l'admittance totale Y^ directe du modele et de la chaine
experi-mentale 113 5.13 Regression lineaire appliquee sur l'admittance totale Y^ simulee (a) et
experimen-tale (b) pour retrouver la capacite Cpz du piezoelectrique PZT. 114
5.14 Comparaison de l'admittance mecanique Y™ directe du modele et de la chaine
experimentale par la regression lineaire 115 5.15 Comparaison de l'admittance mecanique Y{[1 directe du modele et de la chaine
experimentale par la regression lineaire 116 5.16 Les 4 tests de stabilite pour le contrdle actif decentralise de 7 unites 117
5.17 Tracer de la partie reelle de exp(j(j)))Xi(Ym(jwQ) en fonction du dephasage cp. . . 119 5.18 La rotation de Tangle <f>opt des valeurs propres de Ym a la frequence 702Hz. . . . 120
5.19 Le resultat du contrdle actif decentralise a la frequence / = 520Hz sans
compen-sation de phase a gauche et avec compencompen-sation de phase a droite 121 5.20 Le resultat du controle actif decentralise a la frequence / = 702Hz sans
Chapitre 1
Introduction
1.1 Mise en contexte
La reduction du bruit dans les domaines de l'automobile, de l'aeronautique et autres [1] est un argument commercial qui est mis de plus en plus en avant presentement. La methode du contrdle passif est historiquement la plus developpee. Elle consiste en des traitements acoustiques (isolants phoniques, absorbeurs dynamiques...). A l'inverse, les methodes actives, moins courantes, impliquent la mise en oeuvre d'actionneurs et d'une electronique de commande pour reduire les bruits de vibrations. Depuis de nombreuses arinees, les methodes actives trouvent des champs d'applications grace a une efficacite accru pour le traitement des basses frequences [2].
Dans le cadre de ce travail, on cible le contrdle actif des vibrations des basses frequences qui rayonnent des bruits nefastes. II s'agit d'effectuer une preuve de concept sur des panneaux de structures simples, de type academique (telles que : une plaque en appui simple [3] [4]) car on a alors un parfait controle sur la configuration. Par la suite, ces structures simples pour-ront etre transposees sur des structures plus complexes de type paroi d'avion ou encore sur des transformateurs d'Hydro-Quebec [5] et bien d'autres applications.
1.2 Expose de la problematique
Le principe du controle actif vibratoire est de supprimer ou de compenser les effets de vibra-tions indesirables par Taction d'une contre-vibration. Dans le cas d'une plaque, des actionneurs
piezoceramiques PZTs peuvent etre utilises pour generer l'anti vibration et des capteurs de de-formation PVDFs peuvent etre utilises pour mesurer la reponse vibratoire aux points ou se trouvent les piezoceramiques PVDFs. Les structures de types plaques sont caracterisees par un grand nombre de modes, et vont done avoir besoin de plusieurs unites d'actionneurs PZTs et de capteurs PVDFs repartis a sa surface pour controler les vibrations de celles-ci. La gestion de la commande de multiples unites peut etre de deux types : centralisee ou decentralisee.
Le controle actif centralise [6] consiste a traiter toutes les mesures des capteurs dans un controleur unique afin de generer les commandes aux actionneurs (cf. figure 1.1). II peut ainsi considerer toutes les interactions entre les differents actionneurs et capteurs.
ContrSle Actif Centralise
Capteur Capteur ^ w Contrdleur r Actionneur Actionneur
Figure 1.1 - Schema du controle actif centralise.
Le contrdle actif decentralise [7] consiste a avoir un controleur independant pour chaque couple de capteur-actionneur (cf. figure 1.2). Dans ce cas, les interactions entre un actionneur et les capteurs ne peuvent pas etre considerees par le contrdleur. L'avantage du controle decentralise est en premier ordre technique : la defaillance d'un controleur (sa mise hors tension) ne degrade pas les performances globales, on peut envisager une petite unite de contrdle par couple, on evite du filage a une unite unique,... Toutes ces raisons se justifient si on pousse a un systeme MIMO (Multiple Inputs Multiple Outputs).
Controle Actif Decentralise
Capteur Controleur Actionneur
Capteur Contrdleur -w Actionneur
Le defi du controle actif decentralise est d'avoir un systeme en boucle fermee stable [8]. La stability du controle actif decentralise est etroitement liee a la nature et aux positions relatives des actionneurs et capteurs, a la frequence, mais est aussi etroitement lie au reglage du contrdleur implante. En decentralise, une condition de stabilite est d'assurer la passivity du systeme a contrdler, pour cela il faut :
- la colocalisation des unites (les actionneurs a la meme place des capteurs)
- la dualite des variables mesurees par rapport aux variables controlees (le produit des va-riables doit etre ainsi egal a un echange d'energie (J.s- 1))
La double condition de colocalisation et dualite est respectee du moment qu'une seule entite fait office d'actionneur-capteur : c'est le concept du sensoriactuator.
Ainsi, en mettant les actionneurs et les capteurs en vis-a-vis sur une plaque ou dans une meme entite sensoriactuator, les variables du systeme sont dites duales-colocalisees et le systeme est alors passif. Des lors, un controleur decentralise harmonique est en theorie applicable et stable [9j.
Mais en pratique, m§me avec des actionneurs PZTs et capteurs PVDFs reunissant ces proprie-tes, le systeme physique ne respecte pas tout a fait les proprietes de dualite. Certaines frequences posent probleme [4]. Quant a la realisation d'une unite sensoriactuator, il y a des problemes techniques pratiques [10J.
Ainsi, le probleme concerne la conception d'unites actionneurs-capteurs ou sensoriactutor PZTs pour le contrdle actif decentralise de vibrations des structures planes.
1.3 Methodologie, presentation du memoire
Le chapitre 2 de l'etat des connaissances va porter sur ces notions de contrdle avec ces pro-blemes de stabilite. On y verra aussi les avantages de prendre les elements piezoelectriques par rapport a d'autres types d'actionneurs et de capteurs. Puis, on finira par definir Fadmittance mecanique Ym qui servira pour le controle par la suite.
La premiere etape consiste a modeliser cette admittance qui correspond au couplage de la plaque avec le capteur et Factionneur piezoelectrique. Dans le. chapitre 3 sur la modelisation, les lois de la piezoelectricity qui regissent ces materiaux sont explicitees. II en est deduit un modele electrique de ce materiau en tant que capteur et actionneur. Puis, on va coupler le transducteur piezoelectrique en mode actionneur avec la plaque pour avoir le modele vibratoire de la plaque
lorsque celle-ci est excitee par un actionneur PZT et son modele electrique equivalent avec son admittance mecanique contenant les modes de la plaque. Puis, cette information vibratoire est recuperee par le capteur sous forme de charge q ou de courant I. On a finalement le modele modal et electrique de la plaque couplee avec l'actionneur et le capteur piezoelectrique. A partir de ce modele electrique, on va pouvoir determiner quels sont les types d'amplificateurs qui vont servir dans le montage experimental pour recuperer les informations vibratoires.
Dans le chapitre 4 de la chaine de montage experimental est detaille tout le montage utilise pour extraire les admittances mecaniques et ainsi les comparer avec celles simulees. Le chapitre 3, qui definit le modele electrique du couplage plaque-piezoelectrique, permet de choisir les ampli-ficateurs de commande de l'actionneur et de recuperation des donnees. lis sont caracterises dans ce chapitre ainsi que le systeme d'acquisition dSPACE des donnees. Puis, on finira par detailler l'implantation du controleur frequentiel avec ces differents modules qui l'accompagnent pour le controle decentralise.
Le chapitre 5 offre un apergu de la comparaison des differentes admittances mecaniques Ym simulees et experimentales et du resultat du controle actif decentralise a 7 unites. On va com-mencer par les admittances mecaniques de paires actionneurs-capteurs pour finir par celles du sensoriactuator. Les resultats compares seront critiques pour savoir s'il est bon de continuer dans le sens du sensoriactuator. Puis, ce chapitre finira par le controle actif decentralise a 7 unites de paires actionneurs-capteurs PZT-PVDFs reparties de mani^re uniforme et de formes rectan-gulaires sur une structure complexe plane de type plaque d'aluminium [3] [4] avec notamment l'explication de l'algorithme du meilleur dephasage. Puis, on prendra deux frequences, une qui est controlable sans faire d'algorithme sur la matrice de contrdle et l'autre qui necessite l'algorithme du meilleur dephasage pour ainsi comparer l'effet du controleur.
On finira par le chapitre 6, on 1'on va conclure sur les resultats obtenus dans le chapitre 5 de comparaison et quelles sont les recherches possibles a entreprendre par la suite.
Chapitre 2
E t a t des connaissances
2.1 Introduction
Cette section presente l'etat de la recherche qui a ete faite en lien avec le projet, c'est-a-dire le controle actif avec les differentes structures et algorithmes qui y sont associes. Les limites et les conditions propices au contrSle actif de vibrations seront etablies. Ces conditions varient selon la nature, la forme, la localisation des actionneurs et des capteurs. lis faut done bien les decrire.
2.2 Le controle actif de vibration de plaque
Le principe du controle actif est de diminuer le bruit ou la vibration provenant d'une source primaire. Des capteurs sont repartis sur toute la structure plane pour caracteriser cette per-turbation primaire. Les differents capteurs qui sont frequemment utilises dans le controle actif sont :
- les capteurs acoustiques, typiquement des microphones - les capteurs inertiels, les accelerometres
- les capteurs de deformations, les materiaux piezoelectriques
Puis, les informations mesurees par les capteurs sont par la suite traitees par un contrdleur soit de maniere centralisee ou decentralisee. Ces informations sont traitees par celui-ci qui commande les actionneurs pour creer une anti-vibration appelee champ secondaire. Les differents types
d'actionneurs sont :
les actionneurs acoustiques, des haut-parleurs - les actionneurs inertiels, des pots vibrants - les actionneurs de type piezoelectriques
Sur la figure 2.1 est presents le principe du controle actif centralise ou decentralise sur une structure plane. La perturbation primaire excite la structure plane et est controlee par les unites de controle constitutes des actionneurs et des capteurs.
Figure 2.1 - Schema general du principe du controle actif centralise ou decentralise.
2.3 Les deux types de structure d u contrdle actif
i
II existe deux structures de controle qui sont presentees par la suite et qui sont :
- la structure par anticipation : le feedforward - la structure par retroaction : le feedback
2.3.1 Le c o n t r d l e u r p a r a n t i c i p a t i o n
Le controle par anticipation [11] est illustre par la figure 2.2 pour le cas vibratoire. Une excitation primaire d(t) fait vibrer la structure plane et un capteur de reference mesure un signal r(t) qui est correle avec cette perturbation primaire. Ce signal de reference est synchronise avec le controleur. Le filtre de controle C(t) genere le champ secondaire u(t) pour contrer cette vibration primaire d(t). Le signal e(t) du capteur d'erreur correspond a la somme du signal provenant de la perturbation primaire d(t) et du champ secondaire de l'actionne,ur u(t). Les coefficients
du contrdleur C(t) sont adaptes par des algorithmes d'optimisation (Gradient, LMS, Raphson-Newton).
Principe du contrdleur par anticipation
Excitation primaire d(t) " Capteur d'erreur e(t) Structure plane Capteur de reference r(t) 1 4 I Fonction de transfert du contrdleur par anticipation
rf
q<t')
Actionneur u(t)
Algorithme d'adaptation des coefficients du contrdleur
Figure 2.2 - Principe du contrdleur par anticipation.
Une autre maniere de representer le contrdleur par anticipation est sous forme de diagramrne qui permet de passer du schema bloc au modele electrique (cf. figure 2.3). La fonction de transfert H(t) est la representation physique de la structure plane.
C o n t r d l e u r par a n t i c i p a t i o n C o n t r d l e u r Perturbation primaire Fonction de tranfert d(t) de la structure plane r(t) ^ q<t'> u(t) H(t)
u
>\I
•«''
Algorithme d ' a d a p t a t i o n des coefficients du contrdleurFigure 2.3 - Diagramrne du contrdleur par anticipation.
Le principal inconvenient de cet algorithme est qu'il exige de connaitre parfaitement la per-turbation primaire.
2.3.2 Le contrdleur par retroaction
Le controle par retroaction [11] presente en figure 2.4, utilise 1'information y(t) du signal d'erreur pour adapter les coefficients du nitre du contrdleur C(t) et generer la commande u(t) a l'actionneur.
Principe du contrdleur par retroaction
" Capteur d'erreur y(t)
rh
Structure plane i t Excitation prlmaire d(t)L
tJ
Actionneur u(t) Cftl Fonction de transfer! du contrdleur par retroactionFigure 2.4 — Principe du contrdleur par retroaction.
Le diagramme du contrdleur par retroaction est presente sur la figure 2.5.
C o n t r d l e u r p a r r e t r o a c t i o n
u(t)
For ction de tran du s y s t e m e H(t) C(t) fert F ' V . Perturbation Prlmaire d(t) ,+ ) Signal d'e y(t) Fonction de t r a n s f e r t du contrdleur par r e t r o a c t i o n
Figure 2.5 - Diagramme du contrdleur par retroaction.
Cette structure de controle est utilisee lorsque Faeces a la perturbation primaire est impossible ou simplement pas necessaire, comme dans le cas d'une perturbation periodique. La difficulte du contrdleur par retroaction est de faire du temps reel et d'assurer la stabilite de la boucle fermee avec les performances desirees. En effet, la perturbation primaire et le champ secondaire doivent etre en opposition de phase pour reduire les vibrations au point de mesure du capteur. Dans le
cas contraire, les vibrations risquent d'etre amplifiees a chaque iteration du contrdle et le systeme risque d'etre instable. C'est un controleur par retroaction qui est utilise par la suite puisque les perturbations primaires sont sinusoi'dales. Maintenant que les structures de controle sont connues, il faut irnplanter le controleur.
2.4 Le controleur frequentiel
2.4.1 L'implantation du controleur
Le controleur peut etre implante aussi bien de maniere temporel que de maniere frequentiel. On va s'attarder plus particulierement au contrdleur frequentiel car la perturbation est de type harmonique. L'implantation de l'algorithme adaptatif necessite d'avoir rinforrnation sous forme de phaseur, c'est-a-dire de connaitre les signaux dans le domaine frequentiel. Or les signaux y{t) mesures par les capteurs et les signaux u(t) generes aux actionneurs sont des signaux temporels. II faut done avoir recours a deux blocs qui sont l'analyse et la synthese d'un signal. Ainsi le bloc d'analyse permet de passer du signal temporel des capteurs y(t) a son phaseur Y{t). Puis, le bloc de synthese permet de faire 1'inverse, c'est-a-dire de passer du phaseur de commande U{t) a la commande temporelle u(t) injectee dans le systeme. La figure 2.6 decrit le schema du controleur frequentiel qui est valable pour N unites.
C o n t r d l e u r f r e q u e n t i e l d(t) u(t) Synthese i U m H(8) C(s) + J-+ Y '
s
J y(t) Analyse mFigure 2.6 - Bloc diagramme du controleur frequentiel.
2.4.2 Le s y s t e m e M I M O
Avant de voir comment l'algorithme de contrdle frequentiel est implante, il faut commencer par definir le systeme dans le domaine frequentiel. La plaque est une structure complexe qui necessite
d'avoir un nombre N de capteurs dont les signaux generes sont notes Y et N actionneurs dont les signaux sont notes U. Ce systeme est appele un systeme MIMO (Multiple Inputs Multiple Outputs) defini de la maniere suivante :
Y = HU + Dr' (2.1)
Le vecteur Dm est le vecteur de perturbation primaire mesure par les N capteurs lorsque
les comrnandes des actionneurs sont nulles et la matrice Hjj est la matrice de transfert capteur-actionneur TV x N de la plaque definie comme :
Hij =
H\\ • • • HIN
HNX • • • HNN
(2.2)
avec l'indice i qui est le numero du capteur et l'indice j qui est le numero de l'actionneur.
Si l'indice i est egale a l'indice j , alors la fonction de transfert de la plaque Ha est dite directe, sinon la fonction de transfert de la plaque Hij est dite croisee.
2.4.3 L'algorithme adaptatif
Le probleme du contrdle actif est de trouver la bonne commande U a envoyer aux N action-neurs pour minimiser l'information Y mesuree par les N capteurs. Les solutions optimales Uopt
sont donnees par la minimisation du critere quadratique J qui est defini par l'equation (2.3).
J (U) = YHY + UHRU (2.3)
L'operateur (.)H est l'hermitien et la matrice R est la matrice de ponderation de la commande.
Cette matrice R evite d'envoyer des comrnandes trop importantes au systeme. Elle doit etre definie positive (R > 0).
Uopt = argmin.J {U) = -(HHH + R) l HHDm (2.4)
Le fait d'introduire le critere de ponderation de la commande R degrade la parfaite rejection de la perturbation Dm. En effet, lorsque cette matrice R est nulle, la perturbation est rejectee
du signal de sortie et la commande optimale Uopt vaut :
Uopt = -H~lDm (2.5)
Par contre, lorsque cette matrice R est strictement positive, alors la perturbation est partiel-lement rejectee.
Pour trouver la commande optimale Uopt, l'algorithme iteratif de minimisation du critere J le plus utilise est l'algorithme de la plus grande pente ou l'algorithme du gradient, mais l'algorithme de Newton-Raphson permet de converger vers la commande optimale Uopu plus rapidement. Ces
deux algorithmes d'adaptation ont la forme suivante :
U (k + !) = ( / - fxW) U (k) - fiKY (k) (2.6)
ou \i designe le coefficient de convergence. Les matrices C, W et R sont definies differemment selon le type d'algorithme utilise. Dans le cas du gradient, ces matrices sont definies comme suit :
(2.7)
Dans le cas de l'algorithme de Newton-Raphson, ces matrices sont definies comme suit :
R=PHHH
La matrice de transfert de la plaque H est toujours pleine quel que soit le type de controleurs. La matrice K est alors egalement pleine et il est possible de converger vers la solution. Le probleme vient lorsque le controle actif est decentralise, puisqu'il faut assurer la convergence de l'equation (2.6) sur la commande optimale Uopt en utilisant seulement une matrice diagonale K. Dans le
cas de l'algorithme du gradient, la matrice K est derinie par :
K = diag(Huy (2.9)
avec 1'operateur (.)* designe le conjugue.
Dans le cas de l'algorithme de Newton-Raphson la matrice K est definie par :
K = diag (JL\ (2.10)
Dans les deux cas, cela revient a ne considerer que les chemins directs de la matrice H. Les algorithmes de Newton-Raphson et du gradient en controle decentralise ne garantissent pas la stabilite du systeme. Seules certaines frequences vont pouvoir etre traitees, alors que les autres plus critiques ne pourront pas etre controlees par ces deux algorithmes. II faut done trouver une matrice K qui assure que le systeme soit stable sur toute la gamine de frequence de travail.
2.5 Analyse de stabilite
Les conditions de stabilite sont tres importantes car elles predisent si le systeme va s'emballer ou au contraire va reduire les vibrations. Le systeme (2.6) est reecrit sous forme d'un systeme lineaire dans le modele d'etat de l'equation (2.11), et e'est a partir ce de modele d'etat que l'on va pouvoir determiner les conditions de stabilites.
X [k + 1] = AX [k] (2.11)
L'expression Y de l'equation (2.1) est rernplacee dans l'algorithme adaptatif de l'equation (2.6) sous forme de matrice d'etat :
•U[k + l] = (I- fiWI) U[k] - fiKHU [k] (2.12)
En rassemblant les terrnes U[k] dans l'expression (2.12), on obtient :
U[k + l] = (I-fi[WI + KH])U[k] (2.13)
Les matrices A et B sont definies de sorte que le systeme ressemble au syst&ne d'etat de l'expression (2.11) :
A = I-uB ,
M (2.14)
B = KH + WI
Ainsi, la condition necessaire mais suffisante de stabilite est definie par la matrice A qui doit verifier la condition de Schur-stabilite. Cette condition implique que toutes les valeurs propres Aj de la matrice A doivent etre a l'interieur du cercle unite :
\Xi(A)\<l (2.15)
Cette condition (2.15) revient a ecrire :
P
<S^iM
(2.
l6)En prenant en compte que le coefficient de retenue f3 > 0, la condition de stabilite necessaire qui garantit la stabilite du contrdleur est la suivante :
Re[Xi(KH)}>0 (2.17)
Dans le cas centralise, la matrice K des algorithmes de Newton-Raphson et du gradient permet d'avoir la condition necessaire de stabilite (2.17). Pour toute la gamme de frequence de travail, on sera capable de trouver une solution pour stabiliser le systeme et de reduire les vibrations. En revanche dans le cas du decentralise, il est plus difficile de trouver une matrice K diagonale qui
respecte cette condition. Pour cela la condition de diagonale stabilite est introduite. La diagonale stability se r6fere a la diagonale stabilite de Hurwitz, la stabilite de Volterra, la stabilite de Voltera-Liapunov ou la dissipativite [12]. Dans ce cas-ci, la matrice KH est strictement reelle positive (SPR) :
{KH)H + KH>0 (2.18)
L'equation (2.18) decrit la condition de diagonale stabilite. Dans le cas d'un systeme phy-sique, avec les actionneurs et les capteurs qui sont colocalises et avec les variables d'entrees des actionneurs et de sorties des capteurs qui sont duales, alors le systdme est dit passif :
H {jcj) + HT {-ju) > 0 (2.19)
pour toutes les frequences u> [13].
La condition de colocalisation implique que le point d'application de la variable d'entree de la structure est identique au point d'application de la variable de sortie. Dans le cas d'un effort transverse cree par l'actionneur et d'une vitesse transverse enregistree par le capteur, les deux points doivent etre confondus. La condition de dualite implique que le produit des variables d'entree et de sortie soit proportionnel a la puissance mecanique echangee avec la structure. Pour l'exemple de la force et de la vitesse, ces variables sont duales. On en conclut que dans la configuration pot vibrant asservi en force et accelerometre integre pour avoir une vitesse, l'unite de controle serait duale.
La condition de passivite du systeme de l'equation (2.19) est plus restrictive que la condition necessaire de stabilite (2.17). D'apres cette condition de passivite, il n'est done pas necessaire d'introduire K. Cependant, quand la condition de l'equation (2.18) n'est pas respectee, une matrice diagonale peut assurer la stabilite du controle decentralise. Cette matrice K peut fitre definie par l'equation (2.9) ou (2.10), mais elle peut se reduire a une rotation de phase [4] :
K = e ^ " * / (2.20)
</>oPt = arg m i n R e [exp (j(f>) Xt (H (jto0))] (2.21)
<t>
L'algorithme de l'equation (2.21) du dephasage optimal </>opt recherche la plus grande partie reelle des valeurs propres KH (JOJQ) qui assurera la stabilit6 du systeme.
II faut trouver des paires de capteurs et d'actionneurs qui respectent les conditions de co-localisation et de variables duales. Ces deux conditions ne s'appliquent bien que dans le cas de capteurs et d'actionneurs ponctuels.
2.6 Les capteurs et les actionneurs
2.6.1 Les piezoelectriques
En ce qui concerne les actionneurs et capteurs piezoelectriques, Lee et al. [14] detaillent les dif-f6rentes fagons de colocaliser ou pseudo-colocaliser les actionneurs PZTs et les capteurs PVDFs. Selon leur etude, le contrdle en basses frequences des ondes de flexion qui genere la nuisance sonore est fortement compromis par la generation d'ondes longitudinales (extension) par les pie-zoelectriques, qui predomine dans la fonction de transfert du systeme H. Les travaux de Yang et Huang [15] arrivent a la meme conclusion en etudiant la possibilite de colocaliser un action-neur PZT avec un capteur PVDF. Ainsi, cette sensibilite aux ondes d'extension empecherait de garantir la passivite du systeme, qui est la condition de stabilite la plus restrictive. Les travaux de Lee, Elliot et Gardonio [14] demontrent l'impossibilite d'obtenir les proprietes de colocalisa-tion des unites PZT-PVDFs et la dualite des variables de mesure et de commande, a cause de l'effet indesirable des ondes longitudinales. lis ont tente de creer plusieurs configurations spe-ciales $ actionneurs-capteurs superposes sensees privilegier les ondes de flexion. Dans toutes ces configurations, les transferts longitudinaux entre les couches se sont reveles encore plus sensibles aux ondes longitudinales. Yang et Huang [15] ont etudie la faisabilite d'une unite actionneur-capteur pour une poutre intelligente. II en ressort que le mouvement longitudinal vient parasiter le controle de la flexion.
En 2004, Elliot et Gardonio [16] ont etudie les performances de differentes combinaisons d'ac-tionneurs et de capteurs, et les ont comparees en controle centralise et contrdle decentralise. En observant Pattenuation d'energie cinetique globale d'une plaque et de l'energie acoustique rayon-nee en controle decentralise, il semble que les actionneurs exergant des efforts ponctuels soient preferables au materiaux piezoelectriques. lis choisissent de travailler a l'aide d'accelerometres
afin de s'affranchir des ondes longitudinales. Contrairement aux capteurs PVDFs, les accelero-metres sont uniquement sensibles aux ondes de flexion, celles que Ton souhaite controler. Meme si le systeme n'est pas passif sur certaines plages de frequence de travail, il sera possible de le rendre passif en choisissant judicieusement la matrice de coritrdle [4j. Ainsi, les actionneurs PZTs et les capteurs PVDFs ne sont pas contraignant et vont etre choisis dans le but de faire du contrdle de vibration car ils comportent malgre tout de nombreux avantages mentionnes ci-dessous. Leur bonne solidite, leur taille reduite, leur faible cout et leur utilisation facile en font des actionneurs et capteurs parfaits dans l'optique d'une integration dans des structures non academiques.
2.6.2 Avantages des actionneurs PZTs
Les PZTs (Lead Zirconium Titanium) sont des ceramiques ferroelectriques utilisees en tant qu!actionneurs pour leurs excellentes proprietes piezoelectriques et un fort coefficient de couplage electromecanique. Leur grande rigidite autorise de bonnes deformations dans la plaque. Les avan-tages de ce type d'actionneurs surfaciques ont ete demontres par Meirovitch et Norris [17].
Crawley et De Luis [18] ont etudie les contraintes et les deformations que ce type de materiaux induisent, et ont ainsi observe que les efforts d'un actionneur PZT sont concentres sur ses bords lorsqu'il est parfaitement colle a une structure. De nombreux travaux se sont ensuite portes sur des actionneurs piezoelectriques dans le cas de vibrations a une dimension. Le controle de vibrations sur une poutre a permis de verifier Pefficacite des actionneurs et capteurs piezoelectriques pour des applications vibratoires [19,20].
Les actionneurs PZTs generent des contraintes et des deformations qui varient lineairement avec la tension qui leur est appliquee sur la bande de frequence de travail. Cela permet d'appliquer la propriete de decomposition des efforts et moments afin de distinguer les ondes de flexion des ondes longitudinales. La fonction de transfert totale entre 1'actionneur et le capteur est une combinaison lineaire de la flexion et de l'extension.
2.6.3 Avantages des capteurs PVDFs
Le capteur PVDF (Polyvinylidene Difluore) possede de remarquables proprietes piezoelec-triques, si bien qu'il est le plus etudie et utilise. Certaines des proprietes de ces films sont :
- une tres bonne flexibilite (possibilite d'adaptation a des surfaces non planes) - une haute resistance mecanique
- une faible raideur - une faible masse - des films minces
- une activite piezoelectrique homogene dans le plan du film
Sa fidelite de transduction energetique en fait un excellent capteur. Par opposition, son faible facteur de couplage electromecanique et le risque de claquage eleve du dielectrique a cause du champ electrique en font un pietre actionneur. De plus, les films PVDFs sont bien moins onereux que des accelerometres. Leur inconvenient est d'etre sensible a l'extension.
2.6.4 Modelisation du couplage e l e c t r o m e c a n i q u e d u piezoelectrique PZT sur des plaques
Le piezoelectrique est regi par des relations electro-mecaniques (2.22) [21] qui permettent d'avoir un modele electrique equivalent du piezoelectrique en ID (cf. figure 2.7).
/ = sCpU + gv
F = gU + - * (2.22)
sL, eq OU
/ designe le courant de sortie du piezoelectrique dans la direction z
U designe la tension de sortie aux bornes du piezoelectrique dans la direction z v designe la vitesse de deformation du piezoelectrique dans la direction x F designe force qu'exerce le piezoelectrique dans la direction x
Cp designe la capacite du piezoelectrique
g designe le rapport de transformation du gyrator Leq designe la raideur equivalente du piezoelectrique
Mechanical part Gyrator Electrical part
Le gyrator transforme des grandeurs electriques en grandeurs mecaniques. Ainsi sous Taction d'une tension U et d'un courant I, le piezoelectrique genere une force F et une vitesse v qui depend de la deformation de la structure. On peut transformer le piezoelectrique en modele electrique equivalent a condition d'avoir les equations dont on a besom.
Dans le but de coupler la plaque au piezoelectrique, il faut definir le modele electrique equi-valent de la plaque. La plaque peut etre vue comme un systeme masse Mmn, raideur Kmn
amortissement Rmn regi par l'equation modale (2.23) et illustre sur la figure 2.8 [22].
(Kmn + jujmnRmn - u2Mmn) vmn = jojFmn (2.23)
ou vmn et Fmn designent respectivement la vitesse modale et la force externe.
/* m m
R M K
m m mFigure 2.8 - Schema electrique equivalent de la plaque pour 1 seul mode.
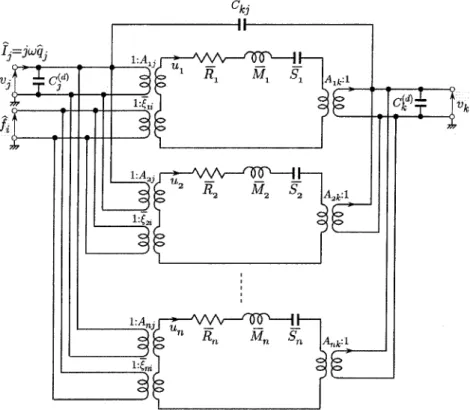
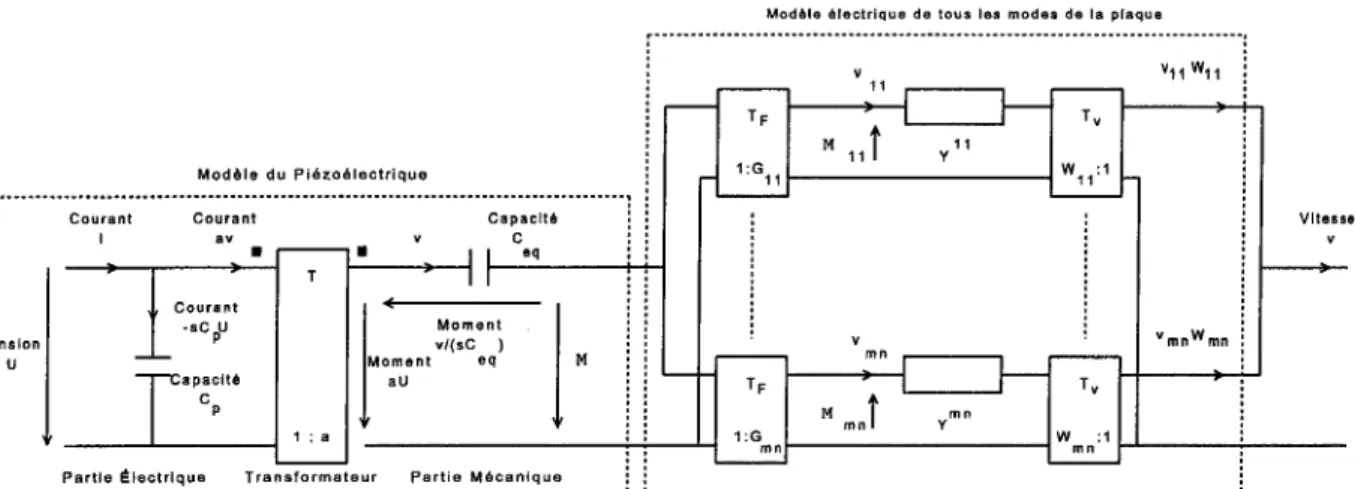
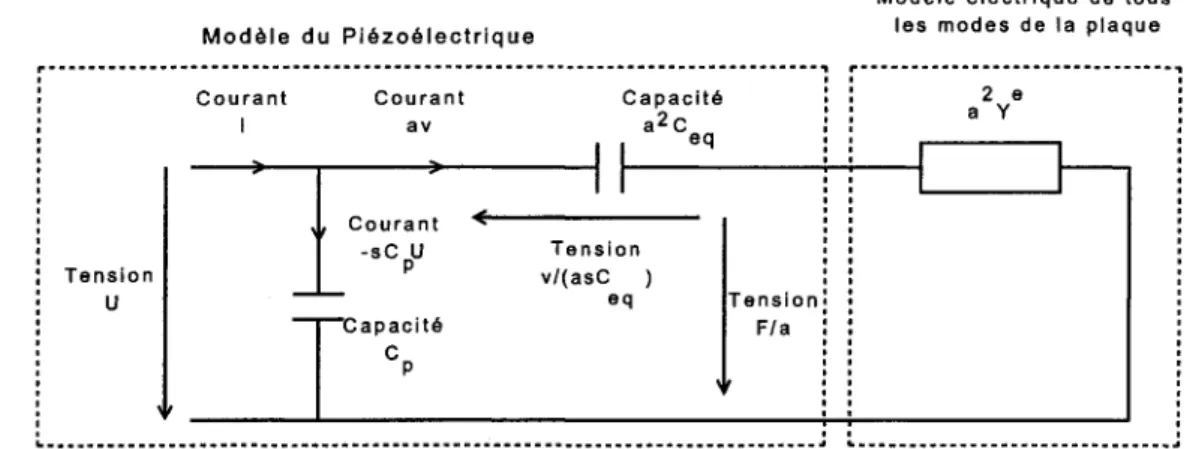
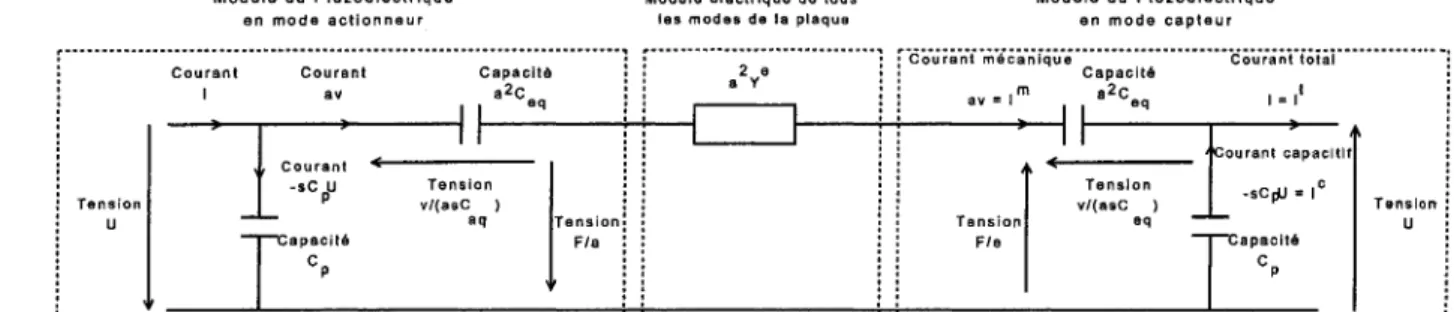
Le couplage de la plaque avec le piezoelectrique est possible en faisant attention a la compa-tibilite du modele electrique du piezoelectrique et celui de la plaque en ajoutant tous les modes de la plaque. Kagawa, Tsuchiya et Wakatsuki [22] proposent un modele de couplage presente sur la figure 2.10. Tous les modes de la plaques sont representes par la mise en parallele d'un mode de la plaque (cf. figure 2.8). Ceux-ci sont couples avec le modele electrique du piezoelectrique par des rapports de transformations Aij et A^. Un actionneur applique une force / sur la structure. Les deux capteurs sont modelises electriquement respectivement par des capacites Cj et Cfc. II y a de plus une capacite de couplage C^j entre les deux capteurs et les transformateurs qui per-mettent de coupler la plaque aux piezoelectriques. Le premier capteur sert pour l'identification des modes de la structures, tant dis que le second sert a l'identification de la perturbation creee par l'actionneur. Les capteurs recuperent l'information de deformation sous forme de quantite de charges q.
r
-
*
—
*
h
% Jkjwv—npp—_h
M, S., Aik* -*•—•—•• A,*:l ^ V '<• W M C~ ^.r,i:lFigure 2.9 - Schema electrique equivalent du couplage electro-mecanique des PZTs sur une plaque.
A partir des equations qui regissent la plaque et le piezoelectrique on est capable de creer un rnodele electrique equivalent qui servira pour la comprehension de l'electronique qui doit §tre developpee pour recuperer les informations utiles.
2.7 L'admittance Y
On a vu precedemment que les actionneurs PZTs et les capteurs PVDFs sont faciles a integrer dans une structure, ce qui presente un interet majeur pour creer des structures dites intelligentes. La matrice de transfert H est determinee par les capteurs PVDFs et les actionneurs PZTs. II faut determiner quelles sont les variables d'entree et de sortie du systeme. Une possibilite de variables duales pour ces types de piezoelectrique est de recuperer la vitesse v de deformaiton de la plaque dans la direction x par le capteur PVDF et d'injecter une force F cre6e par l'actionneur PZT. Ce sont des variables mecaniques que l'on ne peut pas controler directement. Par contre des variables de types courant / et tension U sont des variables auxquelles on a acces directement et qui sont retransformees pour recuperer les informations mecaniques de vitesse v et de force
F. Sous Taction d'une tension U, Pactionneur PZT introduit localement des moments dans la plaque. Cette deformation de plaque est reeuperee par le capteur sous forme de charge electrique q au cours du temps qui creee un courant electrique I. La nouvelle fonction de transfert II est done definie comme etant le rapport des courants / mesurees par les capteurs PVDFs sur les tensions U injectees aux actionneurs PZTs :
Hij{s) = (2.24)
Or le rapport d'un courant / qui est le courant mesure par rapport a une tension U est une admittance Y :
Yij («) =
Uj(s) (2.25)
La figure 2.10 est la representation d'un systeme MIMO avec deux unites de controle actionneur-capteur associees aux admittances mecaniques de la plaque Y.
Actionneur . C a p t e u r . < \ > ' Y i i Actionneur Capteur, 22
Figure 2.10-Schema bloc du systeme decentralise.
II va 6tre tres important de connaltre cette admittance Y du couplage plaque-piezoelectrique pour le controle actif decentralise de vibrations (cf. equation (2.18)). La modelisation electrique du couplage du piezoelectrique et de la plaque va permettre de determiner la stabilite du contr61e actif de vibrations.
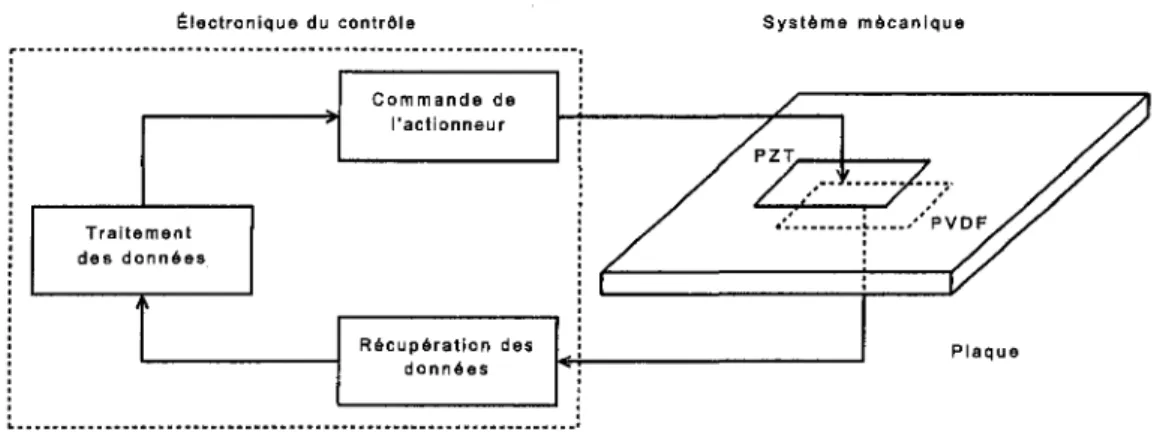
Pour le moment, Pactionneur PZT est pilote par une electronique de commande et les infor-mations du capteur PVDF sont recuperees par une electronique de conditionnement. Puis, un contrdleur se charge a partir des informations du capteur d'actualiser la commande (cf. figure 2.11). On a pris le cas d'une seule unite de contr61e mais ceci est duplique autant de fois qu'il y
a d'unites de controle. £lectronique du contrdle r... ; Com : I * i - . Traitement des donnees
Recuperation des • Plaque donnees *"!
Figure 2.11-Schema bloc de l'electronique de contrdle avec l'unite PZT-PVDF.
2.8 Le sensoriactuator
On peut envisager une entite piezo61ectrique appelee sensoriactuator qui ferait office d'ac-tionneur et de capteur en meme temps. Le principe du sensoriactuator est de recuperer la defor-mation de la plaque sous forme d'un courant electrique I. Puis cette infordefor-mation I est traitee par le controleur qui envoie une tension electrique U sur cette meme entite pour deformer la plaque en introduisant des moments de flexion (cf. figure (2.12)).
Electroniq
Traitement des donnees
Plaque
Figure 2.12-Schema bloc de relectronique du controle avec l'entite sensoriactuator.
Le concept de sensoriactuator respecte les principes de dualite des variables et de colocalisa-tion de l'accolocalisa-tionneur-capteur dans le but de faire du contrdle de vibracolocalisa-tions et done le systeme va etre considere comme passif. En plus de l'avantage de passivite du systeme, le sensoriactuator n'utilise qu'un seul element piezoelectrique.
Systeme mdcanique
mande de ctionneur
ue du contrdle Systeme mecanique Commande de
I'actionneur et Recuperation
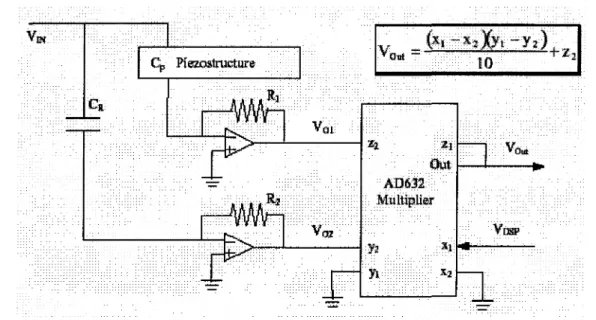
Par contre, des difficultes apparaissent dans la realisation de celui-ci. II faut pouvoir extraire le courant rnecanique I qui determine la vibration de la plaque. Des travaux ont ete faits pour extraire l'information du courant rnecanique I avec un montage electrique analogique [23] [24].
G, FiEarastruetuia
EPH
Wn
>•
"oqf.Figure 2.13- Schema de principe du sensoriactuator.
D'apres le schema en figure 2.13, la tension de sortie Vo.ut(s) s'exprime en fonction de la
tension d'entree Vin (s) et du courant rnecanique / :
Vmt(s) = s(R2CR RiCp)Vin RJis) (2.26)
ou CR est la capacite de reference, Cp est la capacite du piezoelectrique , Ri et i?2 les
resistances des gains des amplificateurs.
En compensant parfaitement la capacite CR par rapport a celle de Cp, et les resistances R\
et i?2 alors la relation (2.26) devient :
Vout(s) - -Rll(s) (2.27)
II faut connaltre parfaitement les composantes electriques du montage R\ et R2, et la com-posante rnecanique du piezoelectrique Cp dans le montage electrique analogique de la figure 2.13
sous peine d'extirper une valeur de courant / erronee [10] et done de ne pas contrdler les vibrations de la plaque. Les valeurs des resistances ne varient pas et on peut les mesurer avec une grande precision. Par contre, la mesure de la capacite du piezoelectrique Cp n'est pas assez precise due a
l'instrument de mesure. En effet, la valeur de la capacite du piezoelectrique est faible qui est de l'ordre du nF. De plus, l'instrument de mesure mis en parallele avec le piezoelectrique peut creer une deformation de celui-ci qui va aussi deformer la structure et fausser la valeur de la capacite mesuree. II faut done reajuster la valeur de capacite de reference CR a chaque fois que la valeur de Cp change. Un autre moyen pour ne pas reajuster cette composante est le montage analogique
precedent avec un compensateur adaptatif numerique invente par Vipperman et Clark [25] :
ifo .—'Xj-JKyt -ji)
Figure 2.14-Schema de principe du sensoriactuator avec le compensateur adaptatif numerique.
Le composant multiplicateur AD632 est defini par :
v - , - foi-
xti(vi-V2) , r
Vcmt = Z\ = 77j 1" Z2 (2.28) ou xi, X2, 3/i, 2/2i z\, z<i sont les broches du multiplicateur AD632 et Vout est la tension de
sortie du multiplicateur AD632.
Cette tension de sortie Vout. :
Voutis) = S(R2CRVDSP - RiCp)Vin{s)) - RxI{s) (2.29)
ou VDSP est la tension du DSP qui est un composant programmable permettant de faire du traitement du signal.