Étude sur l’utilisation du système GNSS pour
l’auscultation topographique du pont de Québec
Mémoire
Youssef Smadi
Maîtrise en sciences géomatiques
Maître ès sciences (M. Sc.)
Québec, Canada
iii
Résumé
Le Port de Montréal, la Garde Côtière Canadienne (GCC) et le Service Hydrographique
du Canada (SHC) ont mis en place un projet commun pour sécuriser le passage des grands
navires sous le pont de Québec. Entre autre, les mesures GNSS, archivées à la seconde de juillet 2012 à juillet 2013, sont utilisées pour étudier les déformations du pont de Québec. Les résultats ont permis de quantifier les déplacements 3D (et leur précision) de la travée centrale du pont en fonction des facteurs comme les conditions météorologiques et les passages des trains et des automobiles.
Par exemple, dans les cas extrêmes, nous avons détecté que les trains de marchandise affaissent la travée suspendue du pont de 17 cm et qu’un vent de 100 km/h a poussé transversalement le centre de la travée suspendue de 17 cm. Entre l’hiver et l’été, les déformations de l’acier causées par les changements de température sont compatibles avec les prédictions. Ces mesures de déformation GNSS sont conformes, en général, aux prédictions faites lors de la construction du pont en 1907.
v
Abstract
The Port of Montreal, the Canadian Coast Guard (CCG) and the Canadian Hydrographic Service (CHS) have established a joint research project to secure the passage
of large ships under the Quebec Bridge. The GNSS measurements (along with radar measurements), archived every second from July 2012 to July 2013, are used to study the deformation of the Quebec Bridge. The results were used to quantify the magnitudes of the 3D movement (and its accuracy) of the central span of the bridge as function of external factors such as meteorological conditions and train and car crossings.
In extreme cases, freight trains make the central span of the bridge to subside by 17 cm and a wind of 100 km/h pushed transversally the suspended span by 17 cm. Between summer and winter seasons, due to temperature variations, the steel deformations are compatible with the predictions. These GNSS deformation measurements are generally in good agreements with the predictions made during the construction of the bridge in 1907.
vii
Table
des
matières
Résumé ... iii
Abstract ... v
Table des matières... vii
Liste des tableaux ... xi
Liste des figures ... xiii
Liste des abréviations et des sigles ... xvii
Remerciements ... xxi
Chapitre 1 - Introduction ... 1
1.1. Description du contexte général ... 1
1.2. Recherches antérieures ... 3
1.3. Formulation du problème ... 6
1.4. Formulation de l’objectif ... 8
1.5. Énoncés des hypothèses ... 8
1.6. Construction du cadre opératoire ... 9
1.7. Établissement de la stratégie générale de cette recherche ... 9
1.8. Contenu du mémoire ... 11
Chapitre 2 - Contexte théorique ... 15
2.1 Modèles associés aux systèmes GNSS... 15
2.1.1. Description des systèmes GNSS ... 15
2.1.2. Échelles de temps ... 18
2.1.3. Systèmes de coordonnées ... 19
2.1.4. Transformation entre PZ-90.11 et WGS-84... 20
2.2 Erreurs GNSS et leurs modélisations ... 22
2.3 Description du logiciel Trimble Business Center (TBC version 3.11) ... 32
2.4 Description du logiciel PPP – RNCan... 35
2.4.1. PPP modèles combinés GPS et GLONASS... 35
Chapitre 3 - Le pont de Québec ... 37
3.1 Historique du pont de Québec ... 37
3.2 Pont de Québec en chiffres... 38
3.3 Plans et devis d’origine ... 40
Chapitre 4 - Description du réseau d’auscultation et analyse de la stabilité des stations
de référence ... 47
4.1. Description du réseau d’auscultation du pont ... 47
4.1.1. Stations de référence ... 50
4.1.2. Station d’auscultation du pont ... 51
4.2. Analyse de la stabilité de chaque station de référence ... 53
4.3. Analyse de la stabilité de la ligne de base QBC2-PEPS ... 58
Chapitre 5 - Sélection de la solution GNSS optimale ... 61
5.1. Description des jeux de données GNSS et auxiliaires ... 61
5.2. Établissement des coordonnées des stations de référence et de comparaison ... 64
5.3. Conversion entre le système de coordonnées cartographique (UTM : N-E) et le repère local (L-T) ... 66
5.4. Analyse de précision entre diverses solutions GNSS... 68
5.5. Analyse de l’effet des délais troposphérique et ionosphérique sur les coordonnées du pont (PtQc) ... 76
5.5.1. Délai ionosphérique (en mode cinématique) ... 76
5.5.2. Délai troposphérique (en mode cinématique) ... 79
5.6. Sélection de la solution optimale pour le traitement ... 81
Chapitre 6 - Résultats et analyses de l’auscultation de la station du pont de Québec .. 83
6.1. Description des sessions d’observations GNSS ... 83
6.2. Présentation et analyse des résultats et des précisions ... 86
6.2.1. Effet du vent transversal ... 88
6.2.2. Effet de la température ... 91
6.2.3. Effet des radiations solaires ... 97
6.2.4. Effet des passages de trains... 98
6.2.5. Effet des automobiles ... 100
6.3. Déformations annuelles obtenues des moyennes des solutions quotidiennes ... 102
6.4. Effet de front météorologique sur les coordonnées ... 104
Chapitre 7 - Conclusions, recommandations et travaux futurs ... 109
7.1. Conclusions ... 109
7.2. Recommandations et travaux futurs ... 113
Bibliographie ... 117
ix Annexe II : Graphiques des résultats de la solution optimale adoptée à chaque semaine test et ceux obtenus avec PPP en mode cinématique ... 125 Annexe III : Résultats graphiques du positionnement du réseau d’auscultation ... 135 Annexe IV : Calcul des composantes de la vitesse du vent dans le repère local du pont de Québec ... 193 Annexe V : Description des fiches techniques du centre de phase et fichiers ANTEX liés aux antennes... 195 Annexe VI : Fichier IONEX pour le contenu total d’électrons ... 199
xi
Liste des tableaux
Tableau 1.1 : Bilan des diverses solutions adoptées pour les tests comparatifs des quatre
semaines tests. ... 10
Tableau 2.1 : Comparaison des constellations GPS et GLONASS [Santerre, 2013]. ... 17
Tableau 2.2 : Comparaison entre les systèmes GPS et GLONASS [Rossbach, 2001]. ... 18
Tableau 2.3 : Constantes géodésiques et paramètres des ellipsoïdes... 20
Tableau 2.4 : Précision des coordonnées des satellites GLONASS [ICD-GLONASS, 2008]. ... 23
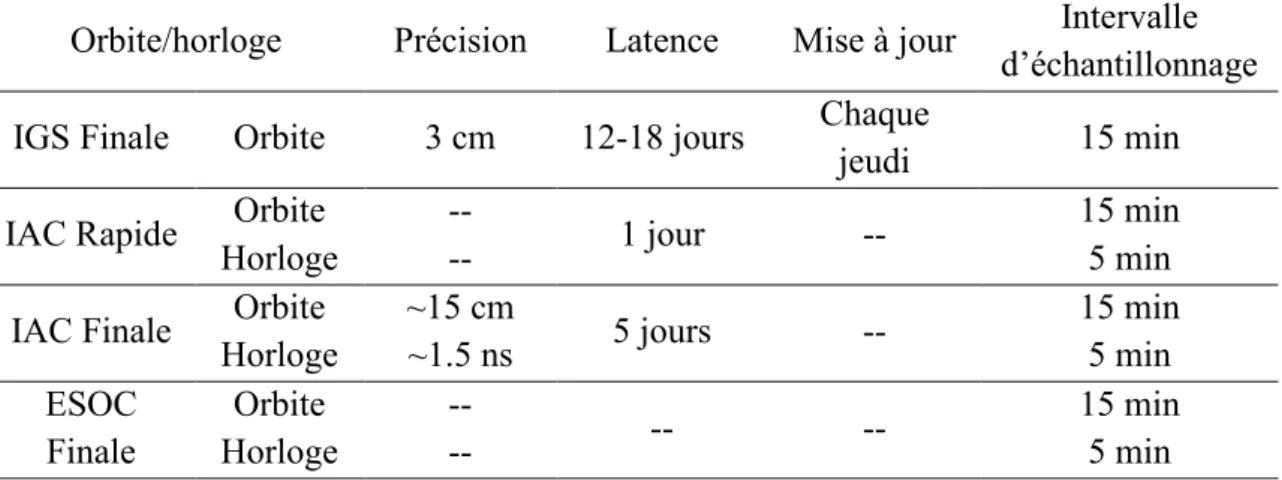
Tableau 2.5 : Produits précis d’orbites et corrections d’erreurs d’horloge des satellites GPS de l’IGS. ... 24
Tableau 2.6 : Produits précis d’orbites et corrections d’erreurs d’horloge des satellites GLONASS de l’IGS. ... 24
Tableau 2.7 : Bilan des erreurs GNSS. ... 32
Tableau 3.1 : Caractéristiques du pont de Québec [DRC, 1908a]. ... 40
Tableau 3.2 : Poids et coût d'entretien du pont de Québec. ... 40
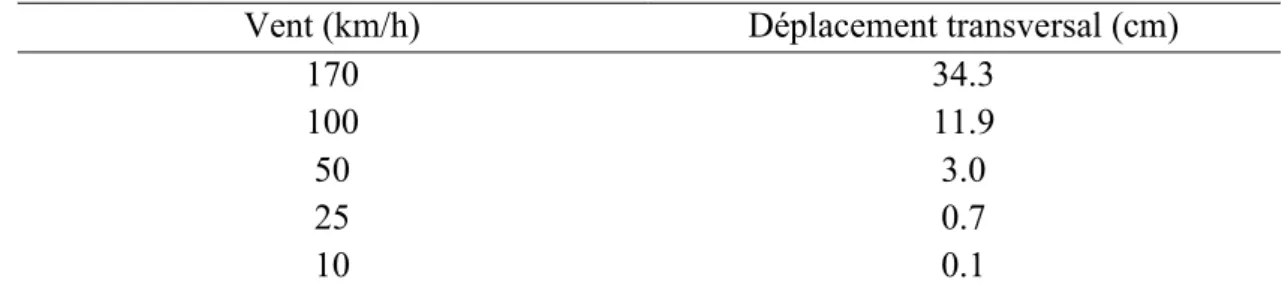
Tableau 3.3 : Vent transversal et son effet prédit sur le déplacement transversal du pont. ... 44
Tableau 4.1 : Dimensions du réseau d'auscultation topographique du pont de Québec. ... 49
Tableau 4.2 : Informations techniques des antennes et des récepteurs utilisés pour l'auscultation topographique du pont de Québec. ... 52
Tableau 4.3 : Coordonnées obtenues par PPP (solution GNSS-L1&L2 en mode absolu statique) pour la station de référence QBC2 suivant les quatre semaines choisies avec les précisions, RMS des résiduelles, le délai troposphérique et leur précision, le nombre d’observations traitées et la température moyenne par jour. La valeur entre les crochets est la précision de la moyenne hebdomadaire. ... 54
Tableau 4.4 : Coordonnées obtenues par PPP (solution GPS-L1&L2 en mode absolu statique) pour la station de référence PEPS suivant les quatre semaines choisies avec les précisions, RMS des résiduelles, le délai troposphérique et leur précision, le nombre d’observations traitées et la température moyenne par jour. La valeur entre les crochets est la précision de la moyenne hebdomadaire. ... 55
Tableau 4.5 : Moyenne (par semaine) des coordonnées obtenues par PPP (solution GNSS-L1&L2 en mode absolu statique) pour la station de référence QBC2 suivant les quatre semaines choisies avec les précisions, RMS des résiduelles, le délai troposphérique et leur précision, le nombre d’observations traitées et la température. ... 57 Tableau 4.6 : Moyenne (par semaine) des coordonnées obtenues par PPP (solution GPS-L1&L2 en mode absolu statique) pour la station de référence PEPS suivant les quatre
semaines choisies avec les précisions, RMS des résiduelles, le délai troposphérique et leur précision, le nombre d’observations traitées et la température. ... 57 Tableau 4.7 : Coordonnées obtenues par TBC (solution GPS-L1&L2 en mode relatif statique par rapport à QBC2) pour la station de référence PEPS suivant les quatre semaines choisies avec les précisions, RMS des résiduelles et la température moyenne par jour. La valeur entre les crochets est la précision de la moyenne hebdomadaire. ... 59 Tableau 4.8 : Moyenne (par semaine) des coordonnées obtenues par TBC (solution GPS-L1&L2 en mode relatif statique par rapport à QBC2) pour la station de référence PEPS suivant les quatre semaines choisies avec les précisions, RMS des résiduelles et la
température. ... 60 Tableau 5.1 : Description de jeux de données GNSS et auxiliaires. ... 63 Tableau 5.2 : Minimum, maximum et moyenne (par année) des diverses données auxiliaires. ... 64 Tableau 5.3 : Coordonnées de comparaison de la station PtQc (journée de 3 mars 2013). ... 65 Tableau 5.4 : Coordonnées et précisions (journée du 3 mars 2013) des stations QBC2, PEPS (par rapport à QBC2) et PtQc (par rapport à QBC2 et PEPS). ... 66 Tableau 5.5 : Comparaison entre les différentes solutions en mode cinématique pour la
semaine du 7 au 13 octobre 2012. ... 73 Tableau 5.6 : Comparaison entre les différentes solutions en mode cinématique pour la
semaine du 17 au 23 janvier 2013. ... 74 Tableau 5.7 : Comparaison entre les différentes solutions en mode cinématique pour la
semaine du 19 au 25 mai 2013. ... 75 Tableau 5.8 : Comparaison entre les différentes solutions en mode cinématique pour la
semaine du 4 au 10 juillet 2013. ... 76 Tableau 5.9 : Moyenne et écart-type (m) des différences des coordonnées de PtQc entre les solutions TBC-GNSS-L1-QBC2 et TBC-GNSS-L1&L2-QBC2 ainsi queTBC-GPS-L1-PEPS et TBC-GPS-L1&L2-PEPS (étude de l’effet ionosphérique). ... 77 Tableau 5.10 : Moyenne et écart type (m) des différences des coordonnées de PtQc obtenues par les deux solutions TBC-GPS-L1&L2-QBC2 et TBC-GPS-L1&L2-PEPS (étude de l’effet troposphérique). ... 80 Tableau 6.1 : Description de la campagne d'observations GNSS. ... 84 Tableau 7.1 : Comparaison entre les déformations prédites de la travée centrale lors de la construction en 1907 et celles obtenues après l’étude d’auscultation topographique du pont de Québec. ... 112 Tableau III.1 : Division de l’année étudiée en 56 semaines depuis le dimanche 1-juillet-2012 au samedi 27-juillet-2013. ... 135
xiii
Liste des figures
Figure 1.1 : Marémètres permanents du Service hydrographique du Canada et modèle
hydrodynamique développé par la Garde côtière canadienne. ... 3
Figure 1.2 : Diagramme d'activité pour l'auscultation topographique du pont de Québec. ... 9
Figure 2.1 : Évolution de la précision des orbites finales de l'IGS [IGS, 2013]. ... 22
Figure 2.2 : Séparation entre le centre de masse et le centre de phase du satellite [Héroux & Kouba, 2001]... 27
Figure 2.3 : Variation de centre de phase d'une antenne [Hofmann-Wellenhof et al, 2001]. .. 28
Figure 2.4 : Traitement PPP combiné GPS et GLONASS. ... 36
Figure 3.1 : Modèle 3D du pont de Québec. ... 38
Figure 3.2 : Dimensions du pont de Québec. ... 39
Figure 3.3 : Piliers et poutres principaux du pont de Québec. ... 41
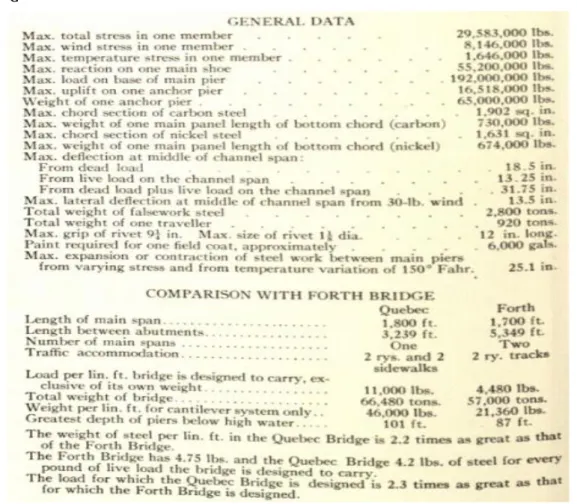
Figure 3.4 : Document d’origine des dimensions, des poids des différentes composantes et d’autres quantités du pont de Québec. ... 41
Figure 3.5 : Données générales du pont de Québec et comparaison avec le pont Forth. ... 42
Figure 3.6 : Déformation de la travée centrale causée par un chargement de 7441 kg/m plus une charge supplémentaire de 45360 kg à la poutre 8 et 9 (milieu de la travée suspendue) [DRC, 1908b]. ... 43
Figure 3.7 : Plan d’origine des déformations maximales causées par la température et le vent [DRC, 1908b]. ... 44
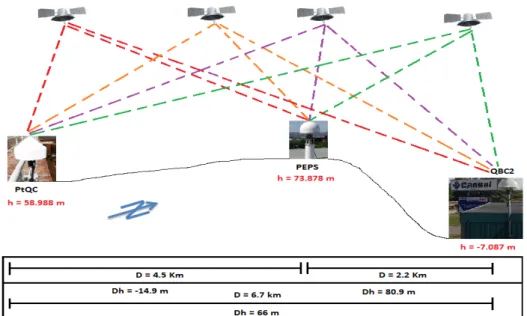
Figure 4.1 : Réseau d'auscultation GNSS du pont de Québec. ... 48
Figure 4.2 : Profil du réseau d'auscultation topographique du pont de Québec. ... 49
Figure 4.3 : Station de référence QBC2. ... 50
Figure 4.4 : Station de référence PEPS. ... 51
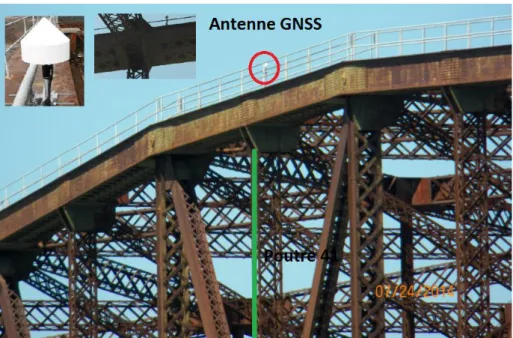
Figure 4.5 : Emplacement de l’antenne fixée sur le pont de Québec. ... 52
Figure 5.1 : Repère global (noir) et repère local (rouge) du pont de Québec. ... 67
Figure 5.2 : Antenne du pont de Québec avec son repère local. ... 68
Figure 5.3 : RMS des résiduelles en mètres (solution statique). À gauche, une comparaison entre les trois solutions (TBC-GNSS-L1-QBC2, TBC-GNSS-L1&L2-QBC2 et PPP-GNSS-L1&L2), au centre, une comparaison entre (TBC-GPS-L1-QBC2 et TBC-GPS-L1&L2-QBC2) et à droite, une comparaison des valeurs PDOP (GNSS vs GPS) pour les 4 semaines tests. ... 70 Figure 5.4 : Comparaison entre les précisions horizontales et verticales (en mètres) des
(TBC-GNSS-L1&L2-QBC2, TBC-GPS-L1&L2-QBC2 et PPP-GNSS-L1&L2) pour les quatre semaines tests. ... 71 Figure 6.1 : Nombres de secondes (époques) traitées par jour pour la campagne GNSS
complète ... 85 Figure 6.2 : Effet du vent transversal sur la variation des coordonnées transversales (semaine du 20 janvier au 26 janvier 2013). ... 88 Figure 6.3 : Précisions horizontales, PDOP et précisions verticales pour la semaine du 20 janvier au 26 janvier 2013... 89 Figure 6.4 : Effet du vent transversal sur la variation des coordonnées transversales (semaine du 27 janvier au 2 février 2013). ... 89 Figure 6.5 : Précisions horizontales, PDOP et précisions verticales pour la semaine du 27 janvier au 2 février 2013. ... 89 Figure 6.6 : Parabole représentant la variation en fonction du vent pour une demi-journée entre le 31 janvier et le 1er février 2013. ... 90 Figure 6.7 : Effet du vent transversal sur la variation des coordonnées transversales (semaine du 23 juin au 29 juin 2013). ... 91 Figure 6.8 : Précisions horizontales, PDOP et précisions verticales pour la semaine du 23 juin au 29 juin 2013... 91 Figure 6.9 : Variation verticale de la station du pont (PtQc) pour la semaine du 17 au 23 janvier 2013. ... 92 Figure 6.10 : Variation verticale de la station du pont (PtQc) pour la semaine du 4 au 10 juillet 2013. ... 92 Figure 6.11 : Corrélation entre la variation verticale (moyenne mobile aux 10 minutes) et la température de l'air aux 10 minutes pour la semaine du 30 juin au 6 juillet 2013. ... 94 Figure 6.12 : Variation longitudinale des coordonnées de la station du pont (PtQc) pour la semaine du 4 au 10 novembre 2012 (saison d'automne)... 95 Figure 6.13 : Variation longitudinale des coordonnées de la station du pont (PtQc) pour la semaine du 3 au 9 février 2013 (saison d'hiver). ... 95 Figure 6.14 : Variation longitudinale des coordonnées de la station du pont (PtQc) pour la semaine du 30 juin au 6 juillet 2013 (saison d’été). ... 95 Figure 6.15 : Emplacement d’un des amortisseurs (à gauche) et la partie supérieure des barres à œillets supportant la travée suspendue (à droite). ... 96 Figure 6.16 : Représentation numérique du blocage de la travée suspendue. ... 96 Figure 6.17 : Illustration du Soleil à son lever et la position du pont par rapport aux radiations solaires. ... 97 Figure 6.18 : Variation transversale des coordonnées de la station du pont (PtQc) pour la
xv Figure 6.19 : Variation transversale des coordonnées de la station du pont (PtQc) pour la semaine du 2 au 8 décembre 2012 et les valeurs des radiations solaires. ... 98 Figure 6.20 : Effet du passage de trains de marchandises sur la variation des coordonnées verticales (3 et 4 mars 2013). ... 99 Figure 6.21 : Effet de passage des trains sur les composantes transversale et verticale
(semaine du 2 décembre au 8 décembre 2012). ... 100 Figure 6.22 : Inclinaison transversale de la travée centrale du pont causé par le passage d’un train (effet de levier). ... 100 Figure 6.23 : Semaine du 19 au 25 mai 2013 pour visualiser l'effet des automobiles sur la composante verticale. ... 101 Figure 6.24 : Nombre d'automobiles dans les 2 directions (nord et sud) pour la semaine du 19 au 25 mai 2013. ... 101 Figure 6.25 : Transformation de Fourier de la journée 21 mai 2013 (amplitude en fonction de la période). ... 102 Figure 6.26 : Variation annuelle des déformations (moyenne des coordonnées par jour et moyenne des températures et vents par jour). Variation longitudinale (en partie supérieure), variation transversale (partie centrale) et variation verticale (partie inférieure). ... 103 Figure 6.27 : Variation longitudinale, transversale et verticale pour la journée du 3 décembre 2012 (solution GPS-L1-PEPS) avec les deux pics, longitudinalement vers le bas (vers le sud) et verticalement vers le haut. ... 104 Figure 6.28 : Conditions météorologiques (température, humidité, pression, vitesse et
direction du vent) pour le 3 décembre 2012. ... 105 Figure 6.29 : Délai troposphérique estimé par le logiciel PPP de RNCan pour la journée du 3 décembre 2012 à la station de référence QBC2 et PEPS en mode statique et à la station du pont (PtQc) en mode cinématique... 106 Figure 6.30 : Carte du ciel qui montrent les satellites GPS présentés au ciel de Québec le 3 décembre 2012 à 4h temps local. ... 107 Figure 6.31 : Résiduelles du satellite G19 (la journée du 3 décembre 2012 à 4h temps local), solution statique relative (GPS-L1, station de référence PEPS) ... 107 Figure 6.32 : Variation longitudinale, transversale et verticale pour la journée du 3 décembre 2012 (solution en mode relatif cinématique GPS-L1-PEPS, sans le satellite G19)... 108 Figure I.1: Exécutable MATLAB développé pour l’étude - GUI (Graphical User Interface). ... 121 Figure II.1 : Graphiques des résultats de variation des coordonnées 3D obtenues avec TBC en mode cinématique (GPS-L1&L2-QBC2) pour la semaine du 7 au 13 octobre 2012. ... 126
Figure II.2 : Résultats graphiques des précisions obtenues avec TBC en mode cinématique (GPS-L1&L2-QBC2) et d'autres données auxiliaires pour la semaine du 7 au 13 octobre 2012... 126 Figure II.3 : Graphiques des résultats de variation des coordonnées 3D obtenues avec TBC en mode cinématique (GNSS-L1&L2-QBC2) pour la semaine du 17 au 23 janvier 2013. ... 127 Figure II.4 : Résultats graphiques des précisions obtenues avec TBC en mode cinématique (GNSS-L1&L2-QBC2) et d'autres données auxiliaires pour la semaine du 17 au 23 janvier 2013... 127 Figure II.5 : Graphiques des résultats de variation des coordonnées 3D obtenues avec TBC en mode cinématique (GNSS-L1&L2-QBC2) pour la semaine du 19 au 25 mai 2013. ... 128 Figure II.6 : Résultats graphiques des précisions obtenues avec TBC en mode cinématique (GNSS-L1&L2-QBC2) et d'autres données auxiliaires pour la semaine du 19 au 25 mai 2013. ... 128 Figure II.7 : Graphiques des résultats de variation des coordonnées 3D obtenues avec TBC en mode cinématique (GNSS-L1&L2-QBC2) pour la semaine du 4 au 10 juillet 2013. ... 129 Figure II.8 : Résultats graphiques des précisions obtenues avec TBC en mode cinématique (GNSS-L1&L2-QBC2) et d'autres données auxiliaires pour la semaine du 4 au 10 juillet 2013... 129 Figure II.9 : Graphiques des résultats de variation des coordonnées 3D obtenus avec PPP en mode cinématique (GNSS-L1&L2) pour la semaine du 7 au 13 octobre 2012. ... 130 Figure II.10 : Résultats graphiques des précisions obtenus avec PPP en mode cinématique (GNSS-L1&L2) et d'autres données auxiliaires pour la semaine du 7 au 13 octobre 2012. . 130 Figure II.11 : Graphiques des résultats de variation des coordonnées 3D obtenus avec PPP en mode cinématique (GNSS-L1&L2) pour la semaine du 17 au 23 janvier 2013. ... 131 Figure II.12 : Résultats graphiques des précisions obtenus avec PPP en mode cinématique (GNSS-L1&L2) et d'autres données auxiliaires pour la semaine du 17 au 23 janvier 2013. 131 Figure II.13 : Graphiques des résultats de variation des coordonnées 3D obtenus avec PPP en mode cinématique (GNSS-L1&L2) pour la semaine du 19 au 25 mai 2013. ... 132 Figure II.14 : Résultats graphiques des précisions obtenus avec PPP en mode cinématique (GNSS-L1&L2) et d'autres données auxiliaires pour la semaine du 19 au 25 mai 2013. ... 132 Figure II.15 : Graphiques des résultats de variation des coordonnées 3D obtenus avec PPP en mode cinématique (GNSS-L1&L2) pour la semaine du 4 au 10 juillet 2013. ... 133 Figure II.16 : Résultats graphiques des précisions obtenus avec PPP en mode cinématique (GNSS-L1&L2) et d'autres données auxiliaires pour la semaine du 4 au 10 juillet 2013. .... 133 Figure IV.1 : Repère global du pont et repère géodésique local. ... 193
xvii
Liste des abréviations et des sigles
Abréviations Définition
ANTEX ANTenna EXchange Format
ARP Antenne Reference Point
BIPM Bureau International des Poids et Mesures
BKG Bundesamt für Kartographie und Geodäsie, Allemagne
CDMA Code Division Multiple Access
CN Canadien National
CNES Centre national d'études spatiales
CODE Centre for Orbit Determination in Europe
CRG Centre de Recherche en Géomatique (Université Laval)
CRSNG Conseil de recherche en sciences naturelles et en génie du Canada
ECEF Earth Centered Earth Fixed
ESA European Space Agency
ESOC European Space Operations Center
FDMA Frequency Division Multiple Access
GCC Garde Côtière Canadienne
GLONASS Global Navigation Satellite System (Russia)
GNSS Global Navigation Satellite Systems
GPS Global Positioning System (USA)
IAC Information Analytical Center
ICD Interface Control Document
IERS International Earth Rotation Service
IGS International GNSS Service
IONEX IONospheric map EXchange ASCII format
ITRF International Terrestrial Reference Frame
ITRS International Terrestrial Reference System
JPL Jet Propulsion Laboratory
MCS Master Control Station
MTQ Ministère des Transports du Québec
NAD North American Datum
PCO Phase Center Offset
PCV Phase Center Variation
PPP Positionnement Ponctuel Précis
PZ-90.11 Parametry Zemli 1990
RADAR RAdio Detection And Ranging
RINEX Receiver Independent Exchange Format
RMS Root Mean Square
RNCan Ressources Naturelles Canada
SA Selective Availability
SCRS Système Canadien de Référence Spatiale
SHC Service Hydrographique du Canada
TBC Trimble Business Center
TEC Total Electron Content
TQR Temps Quasi Réel
TZD Tropospheric Zenith Delay
UAI Union Astronomique Internationale
UGGI Union Géodésique et Géophysique Internationale
UTC Universal Time Coordinated
UTC (SU) UTC of the Russian (Soviet Union) National Etalon Time Scale UTC (USNO) UTC of the U.S. Naval Observatory
UTM Universal Transverse Mercator coordinate system
WGS84 World Geodetic System 1984
WPCA Wavelet Principal Component Analysis
My long career on the road of Freedom taught me that success in climbing to the top of the mountain reveals that most of these peaks waiting to mount it and so on
- Nelson Mandela
xix
À mon Liban…
À mes parents,
xxi
Remerciements
Tout d'abord, je tiens à remercier Dieu, le plus bénéfique et le plus miséricordieux, grâce à qui j’ai finalement pu terminer mes études à la maîtrise au Département des sciences géomatiques de l’Université Laval, un département très reconnu internationalement. Bien que je travaille et m'efforce aussi fort que je peux, sans sa permission, je n’aurais pas été en mesure de terminer ma maîtrise.
Ensuite, j’adresse mes plus sincères remerciements à mon directeur Prof. Rock Santerre pour l'orientation, le soutien constant et l'encouragement tout au long de mes études et mes recherches. J’ai eu la chance d’être accompagné par lui au cours de mes études de 2e cycle, ce qui m’a ouvert une porte importante pour l’avenir. Merci pour ses conseils, sa patience, sa disponibilité, sa compréhension, son apport scientifique, sa critique constructive et son encouragement à continuer malgré les difficultés.
Également, je voudrais remercier le Conseil de recherche en sciences naturelles et en génie
du Canada (CRSNG) pour les bourses d’études supérieures que j’ai obtenues par l’entremise
des subventions accordées à mon directeur de recherche. Sans ce soutien financier, la réalisation de ce mémoire aurait été difficile. Cela m’a permis de me concentrer sur mes études sans avoir à me soucier de l’aspect financier relié à ceci. J’aimerais aussi remercier le
Port de Montréal et le Canadien National (CN)pour l’accès aux données GNSS du pont de Québec et les autres partenaires du projet soient la Garde côtière canadienne (GCC) et le
Service hydrographique du Canada (SHC). Merci également aux autres organismes pour
l’accès aux données auxiliaires et tout particulièrement la compagnie Cansel, Météo ULaval et le Ministère des Transports du Québec (MTQ).
Je tiens aussi à remercier le Centre de recherche en géomatique (CRG) qui m’a accepté d’être un de ses membres étudiants. Je me serais souvent senti bien seul si ce n’eût été des employés et étudiants du Département des sciences géomatiques. Je m’en voudrais d’oublier quelqu’un, c’est pourquoi je ne nommerai personne, juste un remerciement spécifique pour la professionnelle de recherche en GPS, Mme Stéphanie Bourgon, qui m’a accompagné dans toutes les étapes de mon projet. Merci aussi aux trois examinateurs pour avoir accepté la correction de ce mémoire de maîtrise : le Prof. Rock Santerre, le Prof. Marc Cocard de l’Université Laval et le Dr. Simon Banville des Levés Géodésiques du Canada. Merci à tous pour vos encouragements et vos conseils.
Enfin et pas les moindres, je tiens à dédicacer ce mémoire à mes parents. Leur amour, leur support moral, leur soutien matériel et spirituel et leur préoccupation à propos de mon éducation m'ont amené à ce stade de réalisation.
1
Chapitre 1 - Introduction
La mesure de haute précision est un outil très important pour les travaux d’auscultation d’ouvrages de génie civil tels que les ponts, les barrages, les tours de télécommunication et les gratte-ciel.
Ces structures d’ingénierie sont constamment en mouvement sous l’action de différentes contraintes qui s’exercent sur elles. Ces contraintes peuvent être la pression de l’eau, l’action des glaces et la température pour les barrages; et pour les ponts, les passages des trains et des automobiles et les changements météorologiques comme la variation de la température et la force du vent. L’étude des déformations et l’évaluation de ces grandeurs sont très importantes pour éviter les dangers, pour minimiser les risques et pour prendre les décisions qui s’imposent.
Au cours de la dernière décennie, le système GNSS est devenu un outil important pour les applications géodésiques de haute précision, en particulier pour la recherche en géodynamique et pour l’auscultation topographique [Santerre, 2011]. À cette fin, plusieurs fabricants ont développé des récepteurs et antennes spéciaux qui sont conçus pour fournir une gamme de mesures de précision centimétrique, voire millimétrique. Ces mesures de précision sont fort utiles pour l’étude des déformations comme le pont de Québec.
Ce chapitre présente une introduction générale du thème du présent projet de maîtrise ainsi qu’une description du contexte général du projet dans la section 1.1. Un survol des recherches antérieures qui ont inspiré cette et une formulation de problème qui encadre cette recherche se retrouvent dans les sections 1.2 et 1.3. L’objectif de ce projet ainsi que les hypothèses proposées à la solution des problèmes sont discutés dans les sections 1.4 et 1.5. Finalement, un diagramme d’activité qui résume toutes les étapes du travail avec une stratégie générale de cette recherche se retrouvent dans les sections 1.6, 1.7. Le contenu du mémoire est décrit à la section 1.8.
1.1. Description du contexte général
Le problème de hauteur libre sous les ponts et la sécurité des grands navires (comme les porte-conteneurs et les navires de croisières) soulève une question importante : est-ce
que la précision à laquelle la hauteur libre d’un pont est connue peut avoir une influence sur le passage sécuritaire des navires sous celui-ci?
C’est sur cette question que repose le projet global ainsi que le contexte général du projet initié par le Port de Montréal, la Garde côtière canadienne (GCC) et le Service hydrographique du Canada (SHC). Ceux-ci veulent évaluer les déformations du pont de Québec pour corriger les mesures d’un radar (installé de manière temporaire sous le pont) afin de valider le modèle hydrodynamique du fleuve St-Laurent dans la région de Québec, et ce, dans le but de sécuriser le passage des grands navires. Notons que 10 cm de tirant d’eau (ou d’air) supplémentaire représente 100 000$ de profit additionnel pour une traversée transatlantique d’un navire porte-conteneurs.
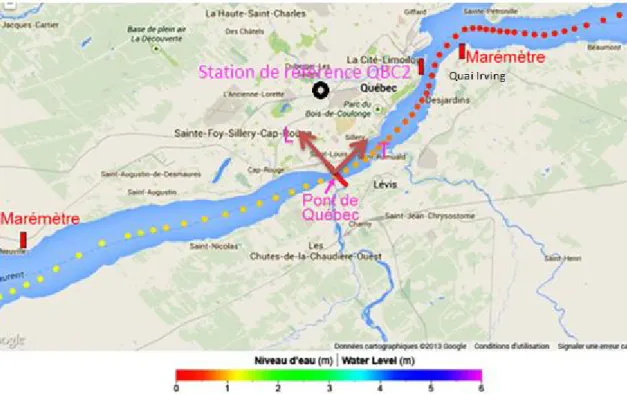
Pour déterminer le niveau d’eau sous le pont, un modèle hydrodynamique a été développé par le SHC et la GCC. Ce modèle s’appuie, entre autres, sur les mesures de marémètres permanents et qui par interpolation permettent de déterminer le niveau de l’eau en tout temps sous le pont de Québec. L’un de ces marémètres est fixé à Neuville et l’autre à Québec (Quai Irving), voir Figure 1.1. Pour valider ce modèle hydrodynamique développé, un radar (mesurant le tirant d’air) a été placé temporairement sur le bord inférieur du pont de Québec pour mesurer la distance entre le pont et le niveau de l'eau.
Un pont est une construction artificielle et subite des déformations. La distance du tirant d’air (ou hauteur libre) varie en fonction de plusieurs facteurs comme la dilatation de l’acier due aux changements de température et le passage des trains et des automobiles. Pour connaître les grandeurs de ces déformations, un récepteur GNSS a aussi été installé temporairement sur le sommet de la travée centrale du pont de Québec.
Notre recherche consiste à étudier les déformations du pont de Québec durant plus d’une année (juillet 2012 - juillet 2013) à partir des mesures GNSS archivées à la seconde. La réalisation des diverses solutions GNSS comme le positionnement relatif conventionnel en modes statique et cinématique et le positionnement ponctuel précis (PPP) permettront d’identifier la meilleure solution GNSS adaptée à l’auscultation topographique du pont de Québec. Les résultats permettront d’analyser et d’interpréter les variations des coordonnées tridimensionnelles pour chaque jour de l'année (à chaque seconde), et enfin de quantifier les grandeurs des déplacements de la travée centrale du
3 pont en fonction des paramètres mentionnés ci-dessus, tout en analysant la précision des diverses solutions GNSS.
Figure 1.1 : Marémètres permanents du Service hydrographique du Canada et modèle
hydrodynamique développé par la Garde côtière canadienne1.
1.2. Recherches antérieures
Les travaux d’auscultation topographique d’ouvrages d’ingénierie avec GPS (GNSS) en temps continu se sont développés avec le déploiement complet des constellations GPS et GLONASS ainsi qu’avec l’amélioration des performances des récepteurs et des antennes nouvellement fabriqués. Les prochains paragraphes résument quelques recherches portant sur l’utilisation du système GPS (GNSS) pour l’auscultation topographique des structures d’ingénierie.
Lamoureux [1998] présentent le développement d’une méthodologie complète pour l’auscultation topographique du pont suspendu Pierre-Laporte (ville de Québec) à l’aide du système GPS. Cette méthodologie comporte le développement des modèles mathématiques et des algorithmes codés dans un logiciel de traitement GPS adapté à ce genre de projet. Le réseau d’auscultation comportait 2 stations de référence et 3 points d’auscultation sur le pont situés au centre du tablier et aux sommets de chacune des
1
tours (ou pylônes). Trois sessions d’observations de 48 heures (aux 2 secondes) ont été faites. De plus une station météorologique temporaire a été établie au niveau du tablier pour mesurer la température, l’humidité relative et la direction du vent. Également, les informations provenant des boucles de détection du trafic étaient disponibles.
L’auteur a démontré la viabilité de l’utilisation du système GPS pour ce genre d’étude de structure d’ingénierie. La corrélation entre les déplacements transversaux instantanés et la force du vent, de même que la corrélation entre les déplacements verticaux et les variations de température viennent prouver cette affirmation.
Nakamura [2000] a proposé une nouvelle méthode en utilisant le système GPS permettant de mesurer directement les déplacements des poutres d’un pont suspendu au Japon induits par la force des vents. Les mesures sur le terrain ont été effectuées, pendant la saison de forts vents, sur un pont suspendu qui a une travée principale de 720 m et de deux travées secondaires de 330 m de longueur. Les déplacements semi-statiques des poutres ont été obtenus avec succès, et sont cohérents avec les valeurs prédites numériquement et les résultats des tests en soufflerie. Les densités spectrales des déplacements mesurés par GPS correspondaient avec les résultats numériques par l'analyse en éléments finis.
L’auteur mentionne que la réponse des poutres aux rafales de vent a été évaluée à partir des enregistrements d’accéléromètres et comparée aux données GPS. Les fréquences de mode des deux techniques ont montré un bon accord dans la plage des basses fréquences et les pics spectraux estimés par les accéléromètres correspondaient aux valeurs obtenues du GPS. Il a conclu que la méthode GPS est fiable et utile pour étudier les comportements de réponse semi-statique causée par les rafales de vent.
Raziq et al [2007] décrivent les résultats d'une étude GPS du pont West Gate à Melbourne, Victoria, Australie qui est un pont à haubans en acier poutre-caisson. La travée principale de la rivière est de 336 mètres de longueur et la hauteur au-dessus de l'eau est de 58 mètres. La longueur totale du pontest de 2 583 mètres.Les informations de fréquence dérivées des résultats GPS sont également comparées aux données de fréquence extraites à partir d'un accéléromètre installé à proximité d'un récepteur GPS. Les résultats GPS correspondent étroitement à l’historique des résultats et des essais de l'accéléromètre pour les principales fréquences modales. Ce qui prouve l'utilité des
5 récepteurs GPS pour surveiller les structures d'ingénierie qui présentent même de faibles mouvements en raison de la rigidité de la structure.
Meng et al [2009] ont étudié l’utilisation du système GNSS pour l’auscultation topographique de quatre ponts, dont le pont Tsing Ma à Hong Kong, en Chine, qui est le sixième plus long pont suspendu au monde et le plus long pont suspendu à travée unique qui porte à la fois le trafic routier et ferroviaire. Dans ce projet, il y avait neuf différents types de capteurs dont des anémomètres, des thermomètres, des accéléromètres, des capteurs de pesage (dynamic weigh-in-motion sensors), des niveaux électroniques, des capteurs de déplacement, des jauges de contrainte, des caméras de surveillance et des récepteurs GNSS, pour un total de 848 capteurs sur le pont Tsing Ma et les deux autres ponts à haubans adjacents.
La technologie GNSS a été introduite en raison de son efficacité et la précision des mesures. Un total de 29 récepteurs GNSS bi-fréquence de type géodésique de haute qualité ont été utilisés dans cette étude. Les données GNSS ont été collectées à un taux d'échantillonnage de 10 Hz de façon continue, et des fibres optiques ont été utilisées pour transmettre les résultats de positionnement de chaque station de surveillance à un centre de traitement pour de plus amples analyses. Les résultats ont révélé, entre autre, une forte relation entre la position verticale du pont et la température ambiante.
Le deuxième pont étudié par la même équipe est le pont Akashi Kaikyo au Japon qui est le plus long pont suspendu routier au monde. Ce pont a été ausculté avec le système GNSS. Les données du vent et de la température ont également été recueillies simultanément. Les séries temporelles des déplacements sur six mois ont été analysées avec la variation du vent et de la température. Les fonctions de régression établies pourraient être utilisées pour repérer les futures déviations anormales après de fortes charges de vent ou des tremblements de terre.
Yi et al [2010] exposent l’utilisation du système GPS (GNSS) pour l’auscultation du pont Humber au Royaume-Uni. Sa longueur est de 1410 m et sa première fréquence propre dans la direction verticale est d'environ 0.116 Hz. Selon les auteurs, l'utilisation d'un GPS (GNSS) en mode cinématique a permis d’atteindre une précision de quelques centimètres avec un taux d’échantillonnage allant jusqu'à 20 Hz.
Kaloop et al. [2013] ont décrit les déplacements de l’auscultation topographique du pont Mansoura en Égypte avec la méthode des composantes principales d’ondelettes (Wavelets) et l’analyse de spectre basé sur des mesures GPS. Les auteurs concluent que l’analyse des composantes principales d’ondelettes (WPCA) peut être utilisée pour éliminer les erreurs des mesures GPS et que le spectre en trois dimensions donne de l’'informations riche pour la réponse dynamique du pont et que les déformations et l'expansion (mouvement de l'articulation) du pont de Mansoura sous les charges actuelles respectent les normes de construction.
1.3. Formulation du problème
Les déformations des structures d’ingénierie dépendent essentiellement du type de contraintes qui s’exercent sur celles-ci. Pour un pont, le changement de la température de l’acier entre le jour et la nuit et entre l’hiver et l’été engendre une déformation longitudinale et verticale de périodicité journalière et saisonnière. Les valeurs des températures accessibles pour notre étude étaient celles de l’air et non celles de l’acier qui sont différentes. Les déformations causées par les radiations solaires (rayonnements diffusés par le Soleil et qui sont mesurés au sol à chaque deux heures) déforment aussi la travée suspendue transversalement entre chaque lever et coucher du Soleil. La force des vents provoque des déformations transversales en fonction de la direction et de la vitesse de ceux-ci. Des déformations verticales sont aussi provoquées par les passages des trains et des automobiles.
Généralement, pour détecter et évaluer ces déformations fines, des stations (récepteurs géodésiques GNSS multi fréquences) sont installées aux endroits critiques de la structure. Ces emplacements doivent être choisis de manière rigoureuse.
Dans notre cas, puisque le radar a été fixé au bord inférieur (côté amont) de la travée centrale dans le but de valider le modèle hydrodynamique, il est important d’installer le récepteur GNSS dans le même axe vertical que le radar (afin de pouvoir corriger efficacement les mesures du radar pour tenir compte du mouvement du pont). Pour cela l’antenne GNSS a été fixée au milieu et au sommet (évitant du même coup toutes obstructions) de la travée suspendue du côté amont.
7 Les précisions recherchées dans le domaine des déformations de structures d’ingénierie doivent être de précision centimétrique ou mieux. D’après [Santerre & Lamoureux, 1997], les précisions GPS dans le cas du pont Pierre Laporte étaient de l’ordre 5 mm horizontalement et 1 cm verticalement pour une solution de navigation sans cumul et lorsque le PDOP était inférieur à 6, en utilisant une station de référence à environ 1 km et avec une faible dénivelée. Puisque l’amplitude des déformations des ponts peut atteindre plusieurs centimètres (voir décimètres) alors ces précisions sont acceptables. Avec le développement et l’amélioration de la qualité des systèmes de positionnement GPS puis GLONASS, le système GNSS (GPS/GLONASS) ou GPS individuel devient un outil fort utile pour les travaux d’auscultation topographique, étant donné les constellations présentes des satellites (32 GPS et 24 GLONASS) qui permettent le positionnement tridimensionnel 24 heures par jour partout sur la planète. D’autres avantages à l’utilisation du système GNSS ou GPS sont que celui-ci est indépendant des conditions météorologiques, que la visibilité entre les deux sites d’observations n’est pas requise. Ainsi il est possible d’établir un réseau d’auscultation dont les stations seraient munies d’antennes GNSS ou GPS permettant en mode relatif l’étude du mouvement de ces stations de manière continue, et ce, même en temps réel.
Avant de formuler la problématique, il faut rappeler que le principe de base du positionnement par satellite basé sur le concept de la trilatération spatiale avec l’estimation de paramètres d’horloge du récepteur. L'observation des signaux provenant des satellites permet de mesurer la distance entre le point d'observation et chacun des satellites observés. Connaissant la position de chaque satellite dans l'espace, on peut calculer la position du point d'observation. Les erreurs affectant la précision du positionnement par méthodes GNSS sont liées :
à la géométrie des satellites utilisés (PDOP);
aux erreurs affectant la mesure de distance entre les différents satellites et le récepteur de l’utilisateur.
Les observations GNSS (GPS) sont entachées d'erreurs systématiques et aléatoires. Les plus importantes sont :
L’effet de l’erreur d’orbite;
L’erreur de position du centre de phase de l’antenne du satellite; Le délai ionosphérique;
Le délai troposphérique; Les multitrajets;
L’erreur de position du centre de phase de l’antenne du récepteur;
L’effet de l’erreur d’horloge du récepteur et les biais électroniques du récepteur. Les différents facteurs causant le mouvement du pont sont :
La force du vent (longitudinale et transversale);
La dilatation de l’acier (changements de température entre l’hiver et l’été, le jour et la nuit);
Le passage des trains et des automobiles.
1.4. Formulation de l’objectif
L’objectif principal de cette étude est de déterminer, étudier, analyser et évaluer les
déformations du pont de Québec et d’évaluer la précision des coordonnées obtenues par les différentes solutions GNSS.
L’application pratique a pour but d’analyser la précision du positionnement GNSS, de mesurer l’amplitude des mouvements lents (saisonniers) et rapides (quotidiens) de la structure du pont de Québec et de les corréler avec les différentes contraintes (vent, température, trafic automobile et passages de train) qui l’affectent.
1.5. Énoncés des hypothèses
Ce projet de recherche repose sur certaines hypothèses reliées aux domaines du génie civil et du génie géomatique :
La force du vent, le mouvement des trains et les changements de température sont les facteurs les plus importants causant la déformation du pont de Québec;
Quoique la solution en mode relatif soit plus précise, la solution PPP peut potentiellement être utilisée dans des études d’auscultation;
Le traitement avec les fréquences L1&L2 donne de meilleurs résultats que celui de L1;
9 La solution GNSS (GPS/GLONASS) améliore la précision des coordonnées comparativement à la solution GPS seul.
1.6. Construction du cadre opératoire
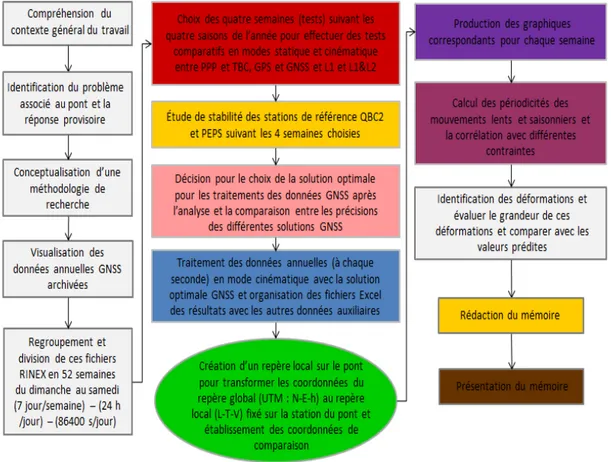
Le diagramme d’activité ci-dessous (Figure 1.2), montre toutes les étapes de cette recherche. C’est le cadre opératoire de ce projet.
Figure 1.2 : Diagramme d'activité pour l'auscultation topographique du pont de Québec.
1.7. Établissement de la stratégie générale de cette
recherche
La stratégie générale adaptée pour cette recherche est résumée dans les points suivants : Choix des quatre semaines représentatives des quatre saisons de l’année étudiée pour effectuer des tests comparatifs en modes statique et cinématique et entre diverses solutions GNSS (Tableau 1.1) :
Entre GPS et GNSS (GPS/GLONASS) pour la station du pont (PtQc) avec une station de référence;
Entre L1 et L1&L2 pour la station du pont (PtQc) avec une station de référence;
Entre PPP (mode absolu : sans station de référence) et TBC (mode relatif avec station de référence) pour la station du pont (PtQc).
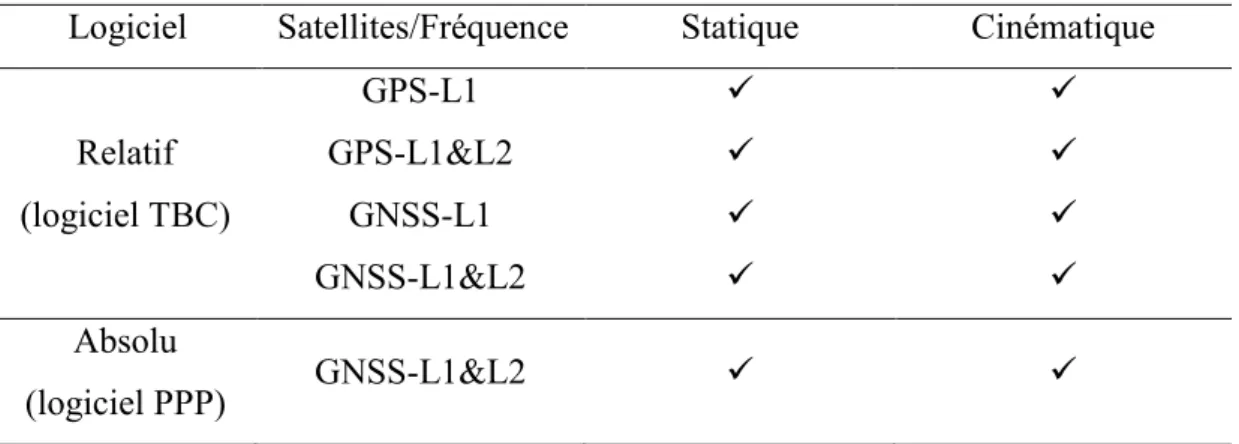
Tableau 1.1 : Bilan des diverses solutions adoptées pour les tests comparatifs des quatre semaines tests.
Logiciel Satellites/Fréquence Statique Cinématique
Relatif (logiciel TBC) GPS-L1 GPS-L1&L2 GNSS-L1 GNSS-L1&L2 Absolu (logiciel PPP) GNSS-L1&L2
Pour plus de clarté, les tests comparatifs pour les quatre semaines (tests) choisies sont : 1- En mode statique, des tests comparatifs entre ces quatre semaines pour étudier la stabilité des stations de référence QBC2 et PEPS en utilisant la solution PPP-GNSS-L1&L2 et aussi la stabilité de la station PEPS en mode relatif par rapport à la station QBC2 en utilisant TBC (voir section 4.3).
2- En mode statique, une comparaison avec la station de référence (QBC2), les diverses solutions possibles pour calculer les coordonnées de la station du pont (PtQc) en utilisant TBC et PPP : TBC-GNSS-L1&L2-QBC2 vs TBC-GNSS-L1-QBC2 vs TBC-GPS-L1&L2-QBC2 vs TBC-GPS-L1-QBC2 vs PPP-GNSS-L1&L2 (mode absolu), voir section 5.4.
3- En mode cinématique, une comparaison entre les quatre semaines tests (saisons) en mode relatif en utilisant la station de référence QBC2: TBC-GNSS-L1&L2-QBC2 vs TBC-GPS-L1&L2-QBC2 vs PPP-GNSS-L1&L2 (voir section 5.4).
4- Calcul de l’effet des délais ionosphérique et troposphérique sur la variation des coordonnées de la station du pont (PtQc) en utilisant la moyenne de la différence entre ces coordonnées obtenues en mode cinématique relatif par rapport à la station de référence QBC2 et PEPS. Ces solutions sont : GNSS-L1&L2-QBC2 et TBC-GNSS-L1-QBC2, TBC-GPS-L1&L2-PEPS et TBC-GPS-L1-PEPS pour quantifier les effets de l’ionosphère sur les coordonnées. La différence des coordonnées obtenues pour la station du pont (PtQc) avec les 2 solutions : L1&L2-QBC2 et
TBC-GPS-11 L1&L2-PEPS permettront aussi de quantifier les effets de la troposphère sur la variation de ces coordonnées (voir section 5.5).
Le logiciel PPP de Ressources Naturelles Canada (RNCan) est accessible via un serveur en ligne qui fait le traitement des fichiers RINEX et calcule les coordonnées de la station demandée (en mode absolu) sans besoin d’une station de référence, mais de préférence avec GNSS-L1&L2. Il utilise les orbites précises des satellites et fait la modélisation des erreurs sans la fixation des ambiguïtés. D’autre part, TBC est un logiciel développé par la compagnie «Trimble» et requiert une station de référence (en mode relatif - QBC2 ou PEPS). Il fait le traitement des lignes de base et calcul les coordonnées de la station inconnue, avec la possibilité du choix de la fréquence (L1 ou L1&L2) et des satellites (GPS ou GPS/GLONASS) pour exécuter le traitement.
Après ces comparaisons concernant les précisions entre les solutions GNSS, nous avons choisi la meilleure solution pour l’auscultation topographique du pont de Québec. Cette meilleure solution est utilisée pour le traitement de toutes les données annuelles en mode cinématique. Dans cette recherche, c’est le traitement époque par époque (à la seconde) qui est privilégié pour détecter principalement l’effet causé par le passage des trains et les changements rapides des vents.
Après le traitement, il faut analyser et interpréter les résultats (variations des coordonnées), les périodicités du mouvement et la corrélation entre les données météorologiques et le mouvement réel du pont. Pour faciliter la tâche, les variations des coordonnées sont être représentées sous forme de graphiques selon les trois composantes (N-E-h) en les transformant en composantes (L-T-V) en joignant les précisions horizontales et verticales, le PDOP, les conditions météorologiques, les radiations solaires, les indices géomagnétiques (Kp), le contenu total d’électrons (TEC) et les passages des trains et des automobiles.
1.8. Contenu du mémoire
Le Chapitre 2 présente le contexte théorique de ce mémoire. Les modèles associés au système GNSS sont d’abord présentés. Le premier volet est une description des constellations et des signaux GPS et GLONASS, respectivement, avec une comparaison entre les deux constellations suivi d’une description des échelles de temps et des systèmes de coordonnées de chaque constellation. Les équations de transformation des
échelles de temps ainsi que la transformation des systèmes de coordonnées sont également présentées.
La 2e partie de ce chapitre est une explication détaillée de toutes les sources d’erreurs qu’il faut modéliser en PPP avec les équations de modélisation. Le troisième volet est une description du logiciel TBC (mode relatif GNSS) avec ses avantages et ses inconvénients. Le dernier volet est consacré à la description de l’approche PPP, puis les équations d’observations de code et de phase pour PPP (modèles combinés GPS/GLONASS).
Le Chapitre 3 présente le pont de Québec, son historique, des informations techniques concernant les dimensions du pont, le poids de l’acier et le coût d’entretien. Les deux derniers volets sont reliés à l’étude d’auscultation topographique, des anciens plans qui montrent les déformations maximales causées par différentes contraintes qui ont été calculées lors du début de la construction en 1907 et une description des récepteurs GNSS utilisées pour cette étude sont présentés dans ces deux dernières sections.
Le Chapitre 4 explique en détail le réseau d’auscultation topographique du pont de Québec. Les stations de référence et le point d’auscultation sur le pont avec les types d’antennes et des récepteurs utilisés qui sont présentés à la première section. Ensuite la deuxième section présente l’analyse de stabilité des stations de référence. Enfin, une analyse de la stabilité de la ligne de base QBC2-PEPS à la troisième section de ce chapitre.
Le Chapitre 5 présente les jeux de données que nous avons utilisés pour ausculter le pont de Québec. La deuxième section décrit l’établissement des coordonnées des stations de référence et de comparaison (l’origine des coordonnées fixes à partir duquel la soustraction des coordonnées a été faite pour obtenir les variations). La troisième section présente le repère local utilisé pour transformer les coordonnées cartographiques UTM (N-E-h) vers le repère local (L-T-V). La quatrième section entre dans le cœur de l’étude géomatique puisque c’est une analyse de précision entre les différentes solutions GNSS (5 solutions) que nous avons comparées. Le dernier volet sélectionne la solution optimale obtenue en termes de précision pour traiter l’ensemble des données GNSS. Le Chapitre 6 présente à la première section une description des sessions d’observations
13 observations GNSS d’une année complète, archivées à la seconde. L’analyse des résultats se retrouvent à la deuxième section. Un résumé des déformations annuelles obtenues des moyennes des solutions quotidiennes se retrouvent à la quatrième section. La cinquième section montre un exemple de l’effet d’un front météorologique sur la variation des coordonnées. Les conclusions, les recommandations et les perspectives sont ensuite présentées au Chapitre 7.
Les annexes sont au nombre de 6. L’Annexe I décrit sommairement les sous-routines et les fonctions que nous avons développées. L’Annexe II représente les graphiques des résultats de la solution optimale utilisée à chacune des 4 semaines tests ainsi que les graphiques des résultats avec PPP. L’Annexe III rapporte tous les résultats des 56 semaines (pour chaque semaine : graphique des variations longitudinale, transversale et verticale et graphique des précisions horizontales, PDOP, précisions verticales, radiations solaires, passage des automobiles, indices géomagnétiques (Kp) et contenu total d’électron (TEC)). L’Annexe IV décrit le calcul des composantes de la vitesse du vent dans le repère local du pont de Québec. L’Annexe V est une description des fiches techniques des antennes (ANTCOM, Trimble et Ashtech) et donne les liens pour les fichiers ANTEX de calibrage de centre de phase des antennes utilisées. Finalement, l’Annexe VI présente la description des fichiers IONEX contennant les valeurs du contenu total d’électrons.
15
Chapitre 2 - Contexte théorique
Ce chapitre résume les différences entre les systèmes GPS et GLONASS et les algorithmes employés par les logiciels utilisés TBC de Trimble et PPP de RNCan. La section 2.1 contient la description des modèles associés aux systèmes GNSS. La section 2.2 contient les erreurs GNSS et leurs modélisations. La section 2.3 est une description du logiciel TBC. Enfin, la section 2.4 décrit le logiciel PPP de RNCan (modèle combiné GPS et GLONASS) avec les équations mathématiques d’observations de code et de phase.
2.1 Modèles associés aux systèmes GNSS
2.1.1.
Description des systèmes GNSS
Constellation GPS
Le système GPS est l’un des 4 systèmes de navigation par satellites (GNSS), qui offre un positionnement fiable et des services de synchronisation pour les utilisateurs civils et militaires du monde entier en continu et «librement» accessible à tous. Il est maintenu par le gouvernement des États-Unis. Les récepteurs GPS calculent les coordonnées dans le système de référence WGS-84.
Le déploiement du système GPS a commencé le 22 février 1978 avec le lancement du premier satellite Bloc I Navstar GPS. La capacité opérationnelle initiale a été déclarée en décembre 1993, avec 24 satellites GPS opérationnels en orbite. La pleine capacité opérationnelle a été atteinte en juin 19952. La constellation GPS actuelle se compose de 32 satellites « Bloc II / IIA / IIR / IIR-M / IIF». Le prochain satellite IIF-10 sera lancé en juillet 2015.
Le segment de contrôle GPS se compose de 18 stations de contrôle au sol, 4 antennes pour communiquer avec les satellites GPS à des fins de commande et de contrôle et une station de commande principale (MCS). La tâche des stations de contrôle est de suivre tous les satellites visibles et de recueillir des observations. Ensuite, le MCS traite ces données pour déterminer les orbites des satellites, et mettre à jour le message de
2
navigation. Le message de navigation (50 bits/s) est transmis à chaque satellite via les antennes au sol. Le segment utilisateur se compose de récepteurs et d’antennes GPS qui sont capables de calculer la position, la vitesse et l'heure.
Signaux GPS
Chaque satellite GPS transmet un signal radio micro-onde sur deux fréquences porteuses modulées par deux codes numériques et un message de navigation. La modernisation du GPS consiste en une nouvelle fréquence L5, un code C sur L2 et des codes militaires M. Les fréquences porteuses sont dérivées de la même fréquence fondamentale f0 = 10.23 MHz et sont générées à 1575.42 MHz et 1227.60 MHz pour L1
et L2 respectivement. Les deux ondes L1 et L2 sont modulées par le code P (Precise ou
Protected) alors que seule l’onde L1 est modulée par le code C/A (Clear/Access ou Coarse/Acquisition). Caractérisé par sa précision. Le code P est crypté pour des raisons
de sécurité et appelé code Y, alors que le code C/A est ouvert pour tous les utilisateurs GPS. Deux types d’observations seront considérés dans ce travail : la mesure de code et la mesure de phase (plus précise que celle du code).
Constellation GLONASS
Le GLONASS est un autre système de navigation par satellites de couverture mondiale. Un récepteur GLONASS calcule la position dans le système de référence GLONASS (PZ-90.11). La constellation nominale GLONASS compte 24 satellites répartis sur 3 plans orbitaux séparés d’un angle de 120°. Les satellites GLONASS orbitent à une altitude de 19100 km au-dessus de la surface terrestre avec une inclinaison de 66° par rapport au plan équatorial avec une périodicité égale à 11h16m. Chaque satellite transmet une nouvelle série d’éphémérides toutes les 30 minutes3.
Signaux GLONASS
Il existe une différence majeure entre les systèmes GPS et GLONASS. En effet, tous les satellites GLONASS transmettent deux ondes porteuses dont les longueurs varient pour chacun des satellites, alors que les longueurs d’onde (λ1, λ2) sont identiques pour tous les satellites GPS. Les fréquences nominales porteuses pour les signaux L1 et L2 du système GLONASS s’écrivent comme suit :
3
17
f n1 = f 01 + n*Δf1 = 1602 + n*(9/16) MHz
f n2 = f 02 + n*Δf2 = 1246 + n*(7/16) MHz (2.1)
n= -7, -6 . . ., 12 sont les numéros de canaux de fréquences f 01 = 1602 MHz est la fréquence L1 relative au canal numéro 0
Δf1 = 9/16 MHz est l’incrément de fréquence L1 entre deux canaux successifs
f 02 = 1246 MHz est la fréquence L2 relative au canal numéro 0
Δf2 = 7/16 MHz est l’incrément de fréquence L2 entre deux canaux successifs4.
Comparaison GPS et GLONASS
Le Tableau 2.1 présente une comparaison entre les constellations GPS et GLONASS, les deux systèmes que nous avons utilisés dans notre recherche. Les autres systèmes sont encore en développement (Galileo pour l’Europe et Beidou pour la Chine) et ne sont pas inclus dans cette étude.
Tableau 2.1 : Comparaison des constellations GPS et GLONASS [Santerre, 2013].
GPS GLONASS
Nombre satellite (2015) 32 24
Nombre plan orbital 6 3
Plan d’inclinaison 55° 66°
Altitude (km) 20180 19100
Période orbitale 11h 58 m 11 h 16 m
Vitesse orbitale (m/s) 3870 3950
Station de contrôle maîtresse 1+1 (réserve) 1
Station de poursuite 18 7
Les comparaisons entre GPS et GLONASS sont résumées dans le Tableau 2.2 en termes des caractéristiques des signaux et des référentiels.
4
Tableau 2.2 : Comparaison entre les systèmes GPS et GLONASS [Rossbach, 2001].
GPS GLONASS
Caractéristiques du signal
Type de
modulation CDMA FDMA
Fréquence du code (MHZ) C/A code : 1.023 P code : 10.23 C/A code : 0.511 P code : 5.11 Éphémérides diffusées Éléments de Kepler et variations temporelles Position, vitesse, accélération Référentiels Système de référence WGS-84 PZ-90.11 Échelle de temps GPST UTC(USNO) GLONASST UTC(SU)
2.1.2.
Échelles de temps
L’UTC est calculé à partir des données de 230 horloges atomiques dans 60 laboratoires mondiaux [BIPM, 2013]. L’UTC (USNO) et UTC (SU) sont deux UTC locales. L'UTC (SU) est maintenue par un ensemble de masers à hydrogène comme l'une des échelles de temps atomique les plus stables dans le monde. Sa différence à l'UTC est de l'ordre de quelques microsecondes. L’écart entre UTC (USNO) et UTC (SU) est aussi de quelques microsecondes. Cet écart temporel est tenu en compte pour une combinaison GPS/GLONASS en estimant 2 paramètres d’horloge du récepteur par rapport à chacune des échelles de temps.
Temps GPS
Le temps du système GPS, mis à jour par la station de commande principale GPS, commence le 6 janvier 1980. Habituellement, le temps du système GPS a une différence de moins de 100 ns avec l'UTC (USNO) tenue par l’Observatoire Naval des États-Unis et a une différence avec UTC de 16 secondes (GPS - UTC = 16s depuis le 1/7/2012 et ce, jusqu’au 30/6/2015). Les utilisateurs GPS obtiennent cette différence à partir de l’un des paramètres dans le message de navigation GPS [Rossbach, 2001].
19
Temps GLONASS
La différence entre le temps de GLONASS et le temps UTC (SU) est inférieure à 1 milliseconde. L'échelle de temps GLONASS est périodiquement corrigée par un nombre entier de secondes simultanément avec les corrections UTC.
Transformation entre les échelles de temps
GPS et GLONASS sont deux systèmes de positionnement dont chacun a une échelle de temps indépendante reliée à différentes réalisations de l'UTC (temps universel coordonné). Par conséquent, la transformation du temps de GLONASS au GPS et vice versa ne peut pas être effectuée facilement. Malgré cela, cette différence entre les deux échelles de temps doit être prise en compte lors de la transformation du temps entre les deux systèmes pour l’intégration GPS/GLONASS combinée.
2.1.3.
Systèmes de coordonnées
Système de coordonnées GPS
Le système géodésique mondial 1984 (WGS-84) est adopté comme système de référence pour le système GPS [ICD-GPS, 2011]. Le cadre de référence est défini comme suit :
L’origine est le centre de masse de la Terre;
L'axe Z est la direction du pôle de référence de l'IERS (IRP);
L'axe X est l'intersection de la Méridien de référence de l’IERS (IRM) et le plan passant par l'origine et perpendiculaire à l'axe Z;
L'axe Y complète le système de la main droite (ECEF : Earth-Centered-Earth-Fixed) du système de coordonnées orthogonales.
Système de coordonnées GLONASS
Le système géodésique PZ-90.11 (ECEF) est adopté comme système de référence pour le système GLONASS [ICD-GLONASS, 2008].
Le cadre de référence est défini comme suit :
L'axe Z est dirigé vers le pôle terrestre conventionnel tel que recommandé par le Service international de la rotation terrestre (IERS);
L'axe X est dirigé vers le point d'intersection de plan équatorial de la Terre et le méridien zéro établi par la Bosnie-Herzégovine (Bureau International de l'Heure); L'axe Y complète un système de coordonnées de la main droite.
Le Tableau 2.3 résume leurs paramètres [ICD-GLONASS, 2008]: Tableau 2.3 : Constantes géodésiques et paramètres des ellipsoïdes.
Paramètres WGS-84 PZ-90.11
Vitesse de rotation de la
Terre 7.292115x10-5 rad/s 7.292115x10-5 rad/s
Constante gravitationnelle 398 600.44x109 m3/s2 398 600.44x109 m3/s2
Constante de gravitation de
l'atmosphère (fMa) 0.36x10
9 m3/s2 0.35x109 m3/s2
Vitesse de la lumière dans
le vide 299 792 458 m/s 299 792 458 m/s Demi-grand axe 6 378 137 m 6 378 136 m Aplatissement 1/298.257 22 1/298.257 84 Accélération de la pesanteur équatoriale -- 978 032.84 mGal Correction à l'accélération de la pesanteur à niveau de la mer en raison de l'atmosphère -0.87 mGal -0.87 mGal Deuxième harmonique zonal du géopotentiel (J20) 1 081 874x10 -9 1 082 625.75x10-9
2.1.4.
Transformation entre PZ-90.11 et WGS-84
Pour une combinaison entre GPS et GLONASS, les paramètres de transformation entre PZ-90.11 et WGS-84 doivent être obtenus si les éphémérides diffuséessont utilisées.
21 Il y a deux méthodes adoptées pour la transformation entre PZ-90.11 et WGS-84. L’une par [Rossbach et al, 1996]qui ont obtenu un ensemble des paramètres de transformation à l'aide de stations de coordonnées relatives pour les deux systèmes connus, et l’autre par [Misra et al, 1996] qui ont utilisé un ensemble des coordonnées GLONASS à la fois PZ-90.11 et WGS-84 pour obtenir des paramètres de transformation. Les deux méthodes ont obtenus des résultats comparables (±4 mm).
La transformation de coordonnées des satellites (éphémérides) doit être faite dans la combinaison GPS/GLONASS pour un positionnement autonome puisque les éphémérides diffusées sont utilisées avec différents systèmes de référence (pour GPS est WGS84 et pour GLONASS est PZ-90.11). Toutefois, pour le PPP, ce problème de transformation ne se pose pas car on y utilise les orbites précises de l’IGS qui sont toutes exprimées dans le système ITRF.
Système international de référence terrestre (ITRF)
L’ITRF est une réalisation du système international de référence terrestre (ITRS). L’ITRS a son origine au centre de masse de la Terre incluant les océans et l'atmosphère. L'ITRS est réalisé par des estimations des coordonnées et des vitesses d'un ensemble de stations d'observation de l'IERS. Selon les résolutions de l'UAI et l'UGGI, l'orientation des axes de l'ITRS est cohérente avec le système du Bureau International de l’Heure (1984.0 ± 3 millisecondes d'arc (mas)) et l'évolution du temps dans l'orientation de l'ITRS n'a pas une rotation résiduelle par rapport à la croûte terrestre [Boucher & Altamimi, 2001].
L’équation et les paramètres de transformation de Helmert à faibles angles sont donnés ci-dessous : ( 𝑋𝑆 𝑌𝑆 𝑍𝑆) = ( 𝑋 𝑌 𝑍 ) + ( 𝑇1 𝑇2 𝑇3) + ( 𝐷 −𝑅3 𝑅2 𝑅3 𝐷 −𝑅1 −𝑅2 𝑅1 𝐷 ) (𝑋𝑌 𝑍 ) (2.2)
où T1, T2 et T3 sont les composantes du vecteur de translation, R1, R2 et R3 sont les angles de rotation en radians, autour des axes x, y, z et D est le facteur d’échelle, XS, YS
et ZS sont les coordonnées transformées au système ITRF et X, Y et Z sont les
coordonnées initiales dans le système WGS-84 ou PZ-90.11. Les valeurs des paramètres de transformation sont données dans [Boucher & Altamimi, 2001]. Le logiciel TRX de
RNCan permet la transformation à 14 paramètres du système de coordonnées ITRF au NAD83 (SCRS).
2.2 Erreurs GNSS et leurs modélisations
Orbites et erreurs d’horloge des satellites
L’erreur d’orbite du satellite est exprimée par la différence entre la position vraie du satellite et sa valeur calculée. Cette différence est représentée en trois dimensions de l’orbite : le long de la trace (Along track), transversal (Cross track) et radial (Radial).
Figure 2.1 : Évolution de la précision des orbites finales de l'IGS [IGS, 2013].
Les informations sur l’orbite du satellite GPS et l’erreur de son horloge sont contenues dans les éphémérides diffusées des satellites sous forme d’éléments de Kepler avec une précision de l'ordre de 1.6 m pour les positions des satellites et de 7 ns pour les corrections d'horloge [IGS, 2013]. Les éphémérides diffusées GLONASS sont sous la forme de coordonnées, vitesses et accélérations. La précision de ces derniers est donnée dans le Tableau 2.4.
![Figure 2.1 : Évolution de la précision des orbites finales de l'IGS [IGS, 2013].](https://thumb-eu.123doks.com/thumbv2/123doknet/6593295.178950/44.892.120.739.369.751/figure-évolution-précision-orbites-finales-igs-igs.webp)