Monitoring road traffic with a UAV-based system
7
0
0
Texte intégral
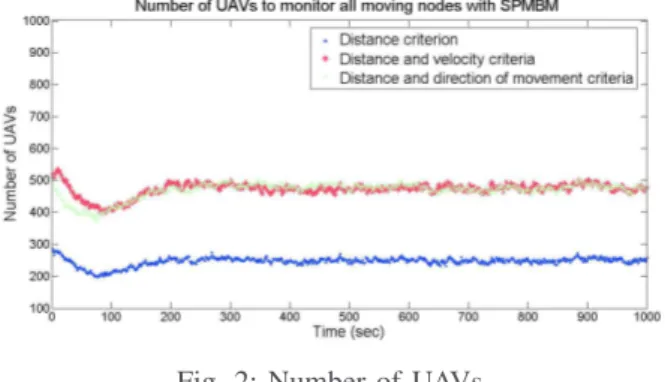
Figure

Documents relatifs