REPRESENTATION SCHEMATIQUE
Par Gilbert GABET - Professeur de construction Lycée Fresnel-
PARIS-Chers collègues, je pense que, comme moi, vous vous heurtez au problème de la représentation schématique des liaisons mécaniques.
Nous avons tous:
- d'un côté une norme qui ne répond pasàce que l'on souhaite,
- d'un autre côté des représentations person nelles qui ne nous satisfont pas non plus.
C'est pourquoi, je vous propose de réfléchir en commun pour rechercher quelque chose de mieux adapté.
Au travers de l'article qui va suivre, je souhaite établir un dialogue sur la représentation des méca-nismes sous forme de schémas. Aussi, n'hésitez pas
à m'écrire ou à proposer un contre article. Toute critique constructive est vivement souhaitée.
Qu'attendons-nous de la représentation sché-matique des liaisons mécaniques?
Essentiellement une représentation simple qui traduise les mouvements relatifs entre les diffé-rents composants. D'où une vision globale et rapide du fonctionnement d'un mécanisme.
Cette représentation doit se faire par un schéma unique (dans le plan ou dans l'espace). Cependant, il n'est pas toujours possible de schématiser une chaîne cinématique ( liaisons complexes centrées, liaisonsàrôles multiples...),et, dans ce cas le dessin reste la seule solution valable.
Il existe donc une difficulté du langage de la schématisation et les lignes qui suivent n'ont pas l'ambition d'apporter une réponse à ce problème ruais d'ouvrir une discussion.
Nous avons à notre disposition deux grandes familles de représentation:
- les schémas stylisés, - les schémas explicites.
1. Les schémas stylisés (représentation abstraite)
Soient deux pièces mécaniques (P1 ) et (P2) assemblées par une liaison mécanique (L). Le
schéma stylisé associé est:
Le trait reliant la pièce (P1 )àla pièce ( P2 ) caracté-rise la liaison mécanique ( L) que nous indiquerons L12. La connaissance de la nature de la liaison mécanique ( L) permet d'y associer ses degrés de liberté et de liaison que nous écrirons ne et ns res-pectivement.
L1 2 = {.nc, ns .}
Par exemple, pour une liaison ponctuelle, nous aurons:
L12
=
liaison ponctuelle=
{.5, 1 . } Ainsi, la schématisation sera la même pour toutes les liaisons mécaniques. Il est donc aisé de représenter une succession de liaisons méca-niques. C'est le cas des chaînes cinématiques que l'on peut traduire en ligne ou en boucle. Voici les deux représentations possibles pour le cas d'une chaîne cinématique de quatre pièces mécaniques:. P4}----,---{P 3
Il. Les schémas explicites ( représentation visuelle)
Quels que soient les symboles retenus, la représentation doit:
-- mettre en évidence les mouvements relatifs, - caractériser la nature de la liaison.
Adoptons les schémas proposés par la norme et modifions les pour les adapter aux propos précé-dents. C'est-à-dire, ne pas laisser d'ambiguité et donner un caractère d'homogénéité.
Encore une fois, les schémas proposés n'ont pour but que de servir la base de discussion pour un dialogue entre collègues.
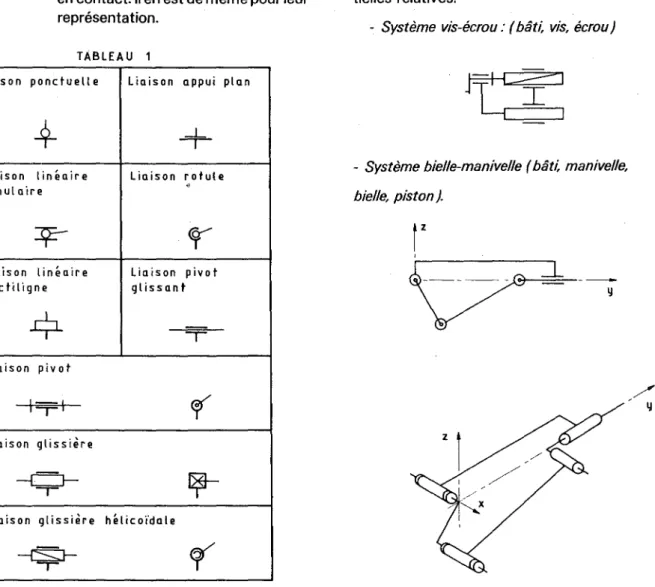
Les tableaux 1 et 2 représentent les symboles relatifs aux neuf liaisons mécaniques classiques qui traduisent les mouvements entre deux solides. Le tableau 1 montre les schémas en représentation plane, le tableau 2 en représentation dans l'espace. Remarques:
1 - Le tableau 1 représente cer-taines liaisons en une seule vue, d'autres en deux vues. Dans le cas de deux symboles pour une même liaison, il faut adopter le schéma le mieux approprié à la représentation.
2 - Il est possible de distinguer les liaisons suivant la nature des surfaces en contact. Il en est de même pour leur représentation.
Le tableau 1 propose:
- un symbole unique pour les liaisons dont le contact se réduit à un point ou une ligne,
- deux symboles pour les liaisons dont le contact est réparti sur une surface.
Les liaisons rotule et plane sont représentées par le même symbole dans les deux vues, et, les liaisons a un degré de liberté sont clairement explicitées dans le tableau 1.
Le cas de la liaison pivot glissant est particulier. Lorsqu'il n'y a pas d'ambiguité, je choisis le même symbole que celui de la liaison pivot en vue de côté. C'est à dire lorsque la liaison est utilisée pour un mouvement de rotation seul afin de conserver un caractère isostatique à une chaîne cinématique simple (voir le deuxième exemple). Si une arnbi-guité subsiste, alors je pense que seule la représen-tation dans l'espace est valable.
III. Exemples de représentations schéma-tiques.
Regardons maintenant quelques représentations de mécanismes, et, dégageons les idées essen-tielles relatives.
- Système vis-écrou: (bâti, vis, écrou)
TABLEAU 1 IJ
~
/
/ IJr
,- Système bielle-manivelle (bâti, manivelle, bielle, piston
J.
Liais0n ponctuel! e Liaison appui plan
-9-
--,
-LLiaison linéaire Liaison rotule
annulaire
.
~
<r
Liaison linéaire Liaison pivo t
rectiligne glissant
*
-,-Liaison piv ot1-,-1
cr
Liaison glissière-c:::::J-
-,-
~
Liaison glissière h é 1iC 0ïd ale
~
«
-28-liaison ponctuelle
TABLEAU 2
~7
Liaison linéaire Linis on pivot
annulaire glissant
/
/
liaison linéaire liaison pivot rectiligne
/
4Y
liaison appui plan liaison glissière
~
/
liaison rotule Liaison glissière
hélicoïdale
cr
#
par sa trace confondue avec AB. La réalisation classique des réseaux donnant les directions des maximums d'intensité s'exprime en fonction des angles (1 et f définis sur le schéma optique par:
2c sin
e
cos fi = K À = K U - 1où c est le pas du réseau,
Kl'ordre,
Ule nombre d'onde.
x
Le mécanisme se compose d'une tige coudée ABC dont la longueur AB reste constante et l'angle ABC est droit. Cette tige coudée tourne autour d'un axe vertical Az et le point C se déplace suivant Ax. Une variation de la longueur AC se traduit par une varia-tion de l'angle
e.
Lesvariations de AC au cours de la rotation du réseau traduisent -àun coefficient de proportionalité près dépendant des caractéris-tiques du montage - les variations du nombre d'onde a ,La visùalisation du mécanisme utilisé en labora-toire est représentée par le schéma suivant:
- Mécanisme
d'entraînement
d'un réseau.Nous abordons maintenant la schématisation d'un mécanisme plus complexe, ce qui nous conduit nécessairement vers une représentation dans l'espace pour les schémas explicites. Puis, nous traduirons également ce mécanisme par des sché-mas stylisés.
L'appareil est un Monochromateur, et, le déroule-ment du spectre est obtenue par la rotation d'un réseau. Leproblème consiste
à
faire correspondreà
chaque position angulaire du réseau un nombre d'onde en crrrl ,et ceci linéairement.Soit le schéma optique:
F1: fente d'entrée
F2 : fente de sortie
Le système d'entraînement est représenté sur la figure ci-dessous. Le réseau R,situé dans un plan supérieur parallèle
à
celui de la figure n'apparait queM R
miroir concave réseau
La compréhension imagée est évidente par la représentation précédente.
Maintenant, si nous devons: analyser, modifier ce mécanisme,ilconvient d'employer l'autre mode de représentation.
Voici le schéma stylisé correspondant au méca-nisme d'entraînement du monochromateur.
(voir page suivante)
-29-L'Utilisation de ce schéma n'est pas liée à l'expli-citation visuelle, mais à la recherche d'autres solu-tions technologiques.
Il est conseillé de faire une analyse, très simple, à l'aide des formules de mobilité de la théorie des mécanismes. Une analyse de la chaîne ( 1 2 3 -1 ) montre que la liaison L3-1 doit être ponctuelle, et non bi-ponctuelle. D'où une première modification.
Maintenant que cette chaîne est isostatique, regardons si le reste convient. Cela nous amène à rechercher le mécanisme isostatique minimum donnant un fonctionnement correct. C'est peut-être par là que l'on doit commencer une étude.
L'étude des mobilités conduit à une solution possible isostatique par contact direct entre ( R ) et ( 3 ). La liaison LR3 est ponctuelle. On retrouve une solution industrielle existante.
Après cette analyse, il est nécessaire de refaire un schéma explicite pour montrer la position cor-recte des nouvelles liaisons. Je laisse le soin au lecteur de schématiser ce mécanisme.
Enrésumé.
Cet article montre l'utilisation des différentes schématisations.
Le schéma explicite permet une compréhension visuelle globale et rapide du fonctionnement d'un mécanisme. Il donne à l'humain une approche intuitive. Quelque soit le type de symbole employé, la représentation d'une chaîne cinématique doit se concrétiser par un schéma unique.
Le schéma stylisé est exploité pour faire une recherche de liaison. Il est d'autant plus utile que le mécanisme est complexe. A partir d'un dessin d'ensemble, il sert également ( cela n'était pas le but de l'article) à analyser, expliquer et décrire des matérialisations de liaisons complètes ou compo-sées.
Et vous, qu'en pensez-vous?
ASSOCIATION DES PROFESSEURS DE TECHNOLOGIE DE L'ENSEIGNEMENT PUBLIC
Adresse. 061 - Avenue du Président Wilson Président. 0 Robert LE BORZEC 94230 - CACHAN Rédacteur du bulletin.O Bernard MÉRY
Directeur de la publication.0 Bernard MÉRY