T
T
H
H
È
È
S
S
E
E
En vue de l'obtention du
D
D
O
O
C
C
T
T
O
O
R
R
A
A
T
T
D
D
E
E
L
L
’
’
U
U
N
N
I
I
V
V
E
E
R
R
S
S
I
I
T
T
É
É
D
D
E
E
T
T
O
O
U
U
L
L
O
O
U
U
S
S
E
E
Délivré par l'Université Toulouse III - Paul Sabatier Discipline ou spécialité : Informatique
JURY
Président :
Mr Jean Pierre Jessel, professeur à l'Université Paul Sabatier de Toulouse Examinateurs :
Mr Yann Dupuy, ingénieur, Oktal Synthetic Environment
Mme Véronique Gaildrat, Mdc HdR, Université Paul Sabatier (directeur de thèse)Nom Nom
Nom Nom
Ecole doctorale : Mathématiques Informatique télécommunications Unité de recherche : IRIT
Directeur(s) de Thèse : Véronique Gaildrat Rapporteurs :
Mr Mohamed Slimane, professeur à l'Université de Tours
Mr MarcDaniel, professeur à l'Ecole Supérieure d'Ingénieurs de Luminy
Présentée et soutenue par Mathieu Larive Le 30 septembre 2008
Universit´e Paul Sabatier – Toulouse 3 Ecole Doctorale Informatique et T´´ el´ecommunications
Mod´
elisation automatique de zones
urbaines
THESE
pr´esent´ee et soutenue publiquement le 30 septembre 2008
pour l’obtention du
Doctorat de l’Universit´
e Paul Sabatier
(Sp´ecialit´e Informatique)
par
Mathieu Larive
Composition du jury
Pr´esident : Mr Jean Pierre Jessel, professeur `a l’Universit´e Paul Sabatier de Toulouse
Rapporteurs : Mr Mohamed Slimane, professeur `a l’Universit´e de Tours
Mr Marc Daniel, professeur `a l’Ecole Sup´erieure d’Ing´enieurs de Luminy
Examinateurs : Mr Yann Dupuy, ing´enieur, Oktal Synthetic Environment
Auteur : Mathieu Larive
Titre : Mod´elisation de zones urbaines virtuelles Directeur de th`ese : V´eronique Gaildrat
Lieu et date de soutenance : Toulouse, septembre 2008 Discipline administrative : Informatique
R´esum´e La mod´elisation pr´ecise de zones urbaines ´etendues repr´esente un d´efi en informatique graphique. Une ville r´eelle r´epond `a des r`egles de construction (implicites ou explicites) et refl`ete souvent de multiples influences historiques, culturelles et sociales `a travers le temps. Atteindre une pr´ecision suffisante pour qu’une ville virtuelle soit cr´edible, pour un utilisateur la visitant au niveau du sol, demande une mod´elisation extrˆemement d´etaill´ee qui exige bien trop de temps et d’efforts de la part d’un concepteur mˆeme exp´eriment´e. L’´emergence de nouveaux probl`emes li´es `a l’urbanisation de masse, tels que l’influence des rayonnements ´electromagn´etiques, la pr´eparation de plans d’´evacuation ou la pr´evision de l’´evolution n´ecessaire des moyens de trans-ports urbains, entraˆıne des besoins croissants en mati`ere d’´etudes et de pr´evisions. La capacit´e `
a g´en´erer rapidement des maquettes virtuelles cr´edibles permet de r´epondre `a ces besoins et constitue donc un sujet d’avenir appel´e `a se d´evelopper car les r´esultats actuels ne satisfont pas les crit`eres pr´ec´edemment d´efinis.
Nous pr´esentons donc en premier lieu une synth`ese des travaux dans ce domaine. Cette synth`ese est d´ecompos´ee selon six ´etapes de g´en´eration, les r´esultats de chaque ´etape repr´esentant un niveau de d´etail logique de la zone urbaine. Nos travaux portent principalement sur deux ´etapes distinctes du processus de g´en´eration d’une zone urbaine virtuelle.
La premi`ere ´etape ´etudi´ee traite du placement automatique du mobilier dans une pi`ece. Nous pr´esentons une ´etude de l’application de m´ethodes issues de la recherche locale pour r´esoudre le placement d’objets au sein d’un probl`eme d´efini par des contraintes. Les objets trait´es sont d´efinis par leur boˆıte englobante, et peuvent prendre une orientation quelconque (non isoth´etique). Nous d´ecrivons ´egalement le modeleur d´eclaratif DEMONS LE qui a ´et´e d´evelopp´e pour ´evaluer la pertinence de cette approche.
La seconde ´etape ´etudi´ee traite de la g´en´eration automatique d’ext´erieurs de bˆatiments (fa¸cades, fondations et toits). Notre m´ethode est bas´ee sur la d´efinition de gabarits de bˆatiments qui sont appliqu´es `a des descriptions de bˆatiments. Une description est uniquement constitu´ee de l’embase tridimensionnelle, de la hauteur de toit et de la hauteur des murs du bˆatiment.
En-nelle isom´etrique, bas´ee sur un ensemble de r`egles. Ces r`egles peuvent ˆetre simples ou bien tr`es d´etaill´ees en fonction des besoins de l’utilisateur.
En conclusion, nous pr´esentons les perspectives concernant la poursuite de ces travaux, plus particuli`erement pour les deux ´etapes que nous avons ´etudi´ees en profondeur, mais aussi pour les autres ´etapes de g´en´eration.
Mots-cl´es : synth`ese d’images, r´ealit´e virtuelle, mod´elisation, architecture, urbanisme, m´ethodes proc´edurales, mod´elisation d´eclarative
Laboratoire : IRIT, Universit´e Paul Sabatier, 118 route de Narbonne, F-31062 Toulouse Cedex 9
Remerciements
J’aimerais remercier en premier lieu Mme V´eronique Gaildrat pour avoir encadr´e mon stage de maˆıtrise, puis continu´e en ´etant mon directeur de stage de DEA et enfin pour avoir m’avoir confi´e ce sujet de th`ese. J’aimerais surtout la remercier pour la qualit´e des ses nombreuses re-lectures, j’atteste ici qu’elle ne saurait ˆetre tenue responsable des abominations grammaticales et orthographiques qui demeurent dans ce m´emoire.
Je remercie ´egalement M Jean Latger pour avoir accept´e ma pr´esence dans l’entreprise qu’il dirige, Oktal Synthetic Environment, dans le cadre de cette th`ese CIFRE. J’aimerais remercier particuli`erement les personnes d’OktalSE qui m’ont apport´e leur aide et leur soutien pendant ces ann´ees, que ce soit Paul Pitot, Yann Dupuy ou Carole Nissoux, car j’ai ´enorm´ement appris en travaillant avec elles.
Je remercie messieurs Marc Daniel et Mohamed Slimane pour m’avoir fait l’honneur de s’int´eresser `
a ce travail. Les commentaires pertinents qu’ils ont su formuler ont grandement contribu´e `a am´eliorer la qualit´e de ce manuscrit.
Je remercie M Jean Pierre Jessel, responsable de l’´equipe Vortex, pour sa disponibilit´e, sa gen-tillesse et son ´ecoute qui m’ont ´et´e fort pr´ecieuses pour ma vie de doctorant et aussi pour mes diverses exp´eriences professionnelles. Je ne sais pas si beaucoup d’´etudiants en DEA ont la pos-sibilit´e d’aller assister `a des colloques, mais j’ai ´enorm´ement appr´eci´e l’honneur que tu as fait en m’y emmenant.
Il y a quelques ann´ees, j’avais f´elicit´e M Mathias Paulin pour sa patience et sa pers´ev´erance dans ses tentatives de ”¡pingouinisation”¿ de la soci´et´e. Je ne sais pas ce qu’il en est de la soci´et´e, mais pour le parc de machines de l’´equipe, ¸ca prend bonne tournure. Merci encore de ton enthousiasme et de ton ´energie, et surtout, merci de m’avoir d´emarch´e pour le DEA, il y a d´ej`a fort longtemps.
J’aimerais t´emoigner ici de l’affection et du respect que j’´eprouve pour toutes les personnes que j’ai eu l’occasion de croiser durant ces ann´ees `a l’IRIT. Que ce soit Lo¨ıc Barthe et ses s´eminaires tenus `a bout de bras (que j’ai particuli`erement appr´eci´es), Patrice Torguet et Roger Pujado
´
etudiants en DEA (et maintenant master) et en th`ese. Je garderai longtemps un souvenir ´emu du mail que Ga¨el nous a envoy´e en rentrant d’un pot `a 2h du matin, ou des moments pass´es en compagnie d’Antoine.
Je remercie enfin mon entourage pour leur pr´esence et toutes leurs qualit´es que je ne saurai toutes ´enum´erer. Mention sp´eciale `a Elodie pour sa relecture de manuscrit pas du tout au der-nier moment (je me demanderai longtemps comment tu as fait pour faire un travail pareil en si peu de temps). Je souhaite `a Romain que sa fin de doctorat soit aussi agr´eable que la mienne et au final trois docteurs pour trois enfants, merci beaucoup `a nos parents de nous avoir support´es dans nos ´etudes.
Je profite ´egalement de ces lignes pour adresser un grand merci `a la joyeuse troupe que nous avons constitu´ee ces derni`eres ann´ees, que les noms de Bibinne, Gerd, Censhi, D´ezou, Ecknouille et autres Sysy et Baba nous accompagnent encore de longues ann´ees.
Et enfin, last but definitively not least, j’adresse un ´enorme merci du fond de mon coeur `a Lætitia. Me supporter `a tous les sens du terme est d´ej`a un exploit en soi, mais ce que tu fais tous les jours avec moi et pour moi, ainsi que tout ce que nous construisons ensemble me donne une envie folle de me d´epasser pour vous. Je termine ce paragraphe avec un petit mot pour Emma, quand tu liras ce texte, passe donc faire un cˆalin `a ton p`ere.
Table des mati`
eres
Table des figures 9
Glossaire 13 Introduction 17 1 Objectifs de l’´etude . . . 21 2 Cadre de l’´etude . . . 22 3 Structure du rapport . . . 23 3.1 Etat de l’art . . . 23
3.2 Placement automatique d’objets . . . 24
3.3 G´en´eration automatique d’ext´erieur de bˆatiment . . . 25
3.4 Annexes . . . 25
Chapitre 1 Etat de l’art relatif `a la g´en´eration d’environnements urbains 29 1.1 Zone urbaine . . . 29
1.2 R´eseau routier . . . 30
1.2.1 Pr´esentation . . . 30
1.2.2 M´ethodes issues de l’analyse d’image . . . 32
1.2.3 M´ethode quasi-s´emantique . . . 34
1.2.4 G´en´eration . . . 34 1.2.5 Discussion . . . 39 1.3 Blocs . . . 42 1.4 Parcelles . . . 43 1.4.1 Pr´esentation . . . 43 1.4.2 G´en´eration . . . 43 1.4.3 Discussion . . . 46 1.5 Ext´erieurs . . . 47
1.5.1 M´ethodes non automatiques . . . 47
1.5.3 Discussion . . . 57
1.6 Plan de bˆatiments . . . 58
1.6.1 Alg`ebre de Manhattan . . . 58
1.6.2 EAAS . . . 59
1.6.3 ARCHIPLAN . . . 60
1.6.4 HM2PH . . . 60
1.7 Int´erieurs meubl´es . . . 61
1.7.1 Approches manuelles . . . 61 1.7.2 Approches semi-automatiques . . . 62 1.7.3 Approches automatiques . . . 65 1.8 Conclusion et perspectives . . . 75 1.8.1 Niveaux de d´etail . . . 75 1.8.2 Conclusion . . . 75 1.8.3 Perspectives . . . 76
Chapitre 2 Placement automatique d’objets 77 2.1 M´etaheuristiques . . . 82
2.1.1 Panorama . . . 83
2.1.2 Diff´erents types de m´etaheuristiques . . . 86
2.1.3 Analyse des m´etaheuristiques . . . 91
2.2 Mise en œuvre . . . 96
2.2.1 Op´erateurs de Minkowski pour les contraintes g´eom´etriques . . . 96
2.2.2 Domaines et objets . . . 99
2.2.3 Contraintes . . . 100
2.3 Limitations actuelles . . . 105
2.3.1 Limitation `a la convexit´e . . . 105
2.3.2 Du placement al´eatoire dans un polygone . . . 105
2.3.3 Ni 2D, ni 3D : 2D et demi . . . 107
2.4 R´esultats . . . 108
2.5 Conclusion . . . 109
Chapitre 3 G´en´eration de fa¸cades 113 3.1 Introduction . . . 114
3.2 Gabarits de Fa¸cades . . . 117
3.2.1 Grammaire de murs . . . 117
3.2.2 Mise en œuvre . . . 122
3.3.1 Gabarits de fondations . . . 123
3.3.2 Gabarits de toits . . . 126
3.4 Resultats . . . 131
3.4.1 Format de fichier et mode op´eratoire . . . 131
3.4.2 Performance et complexit´e . . . 133
3.4.3 Exemple de gabarit de fa¸cades . . . 134
3.5 Discussions . . . 135
3.6 Conclusions et travaux futurs . . . 138
Conclusions et perspectives 141 Annexes 147 Annexe A Oktal Synthetic Environment 147 A.1 Identit´e . . . 147
A.2 Comp´etences g´en´erales . . . 147
A.3 Les clients d’OktalSE . . . 148
Annexe B Approche CSP 151 B.1 D´efinition . . . 151 B.2 R´esolution . . . 152 B.3 Filtrage . . . 152 B.4 Types de CSP . . . 152 B.4.1 CSP num´eriques . . . 152 B.4.2 CSP hi´erarchiques . . . 153 B.4.3 CSP dynamiques . . . 153 B.5 Conclusion . . . 153 Annexe C L-System 155 C.1 Origine (sic) . . . 155 C.2 Structure . . . 155 C.3 Exemple . . . 156
Annexe D Mod´elisation d´eclarative 159 D.1 Pr´esentation g´en´erale . . . 159
D.2 Les trois phases de la mod´elisation d´eclarative . . . 162
D.2.1 La phase de description . . . 162
D.2.2 La phase de g´en´eration . . . 164
Annexe E Approches manuelles 167
Table des figures
1 Les trois phases de la mod´elisation d´eclarative. . . 19 2 Visualisation vectorielle, visible et infrarouge d’une partie de l’a´eroport de Blagnac 20 3 D´ecomposition hi´erarchique de la g´en´eration d’une ville . . . 24 4 Exemple de r´esultats obtenus avec notre outil de g´en´eration de fa¸cades de bˆatiments 26
1.1 D´etail du centre ville de Canberra (Australie) . . . 31 1.2 Diff´erents types de tron¸cons d’un r´eseau routier dans VUEMS [Don04] . . . 35 1.3 Un r´eseau routier g´en´er´e `a partir de donn´ees en entr´ee [PM01] . . . 37 1.4 Exemple de sch´emas urbains [Li`e96], de gauche `a droite : (a) concentrique, (b)
radial, (c) ´echiquier, (d) diamant. . . 39 1.5 Diff´erentes ´etapes successives de g´en´eration de g´eom´etrie complexe `a base de
graphtales [MBST01] . . . 40 1.6 G´en´eration d’une zone urbaine `a partir d’un L-System et de r`egles de contraintes
environnementales et topographiques [MBST01] . . . 41 1.7 De gauche `a droite : routes, blocs et parcelles [PM01] . . . 43 1.8 Exemples de parcellisation de blocs [Per06] . . . 45 1.9 Exemple d’espace de solution r´eduit `a cause de la discretisation de l’espace [Li`e96] 46 1.10 Exemple de r´ealisations du projet LaHave [RMS96] . . . 48 1.11 Exemple de chateau-fort g´en´er´e avec le Castle Construction Kit [GBHF05] . . . . 49 1.12 Diff´erentes ´etapes de d´erivation [PM01] . . . 50 1.13 Reconstruction de l’Empire State Building (New York City) [PM01] . . . 51 1.14 Reconstruction d’un bˆatiment existant (`a gauche) `a Rennes. Le mod`ele virtuel,
1.15 Un autre bˆatiment de Rennes. Ce mod`ele utilise le mˆeme FL-system que la figure pr´ec´edente, seuls les ´el´ements terminaux et les textures ont ´et´e modifi´es.[Per06] . 52 1.16 Cette image montre plusieurs bˆatiments g´en´er´es `a l’aide des split grammar [WWSR03] 53 1.17 De gauche `a droite : (a) donn´ee en entr´ee (image rectifi´ee d’une fa¸cade), (b)
fa¸cade automatiquement subdivis´ee et encod´ee comme un arbre de forme, (c) mod`ele polygonal et enfin (d) rendu du r´esultat final incluant ombres et r´eflections
rendues possibles par les informations s´emantiques [MZWG07] . . . 53
1.18 Incoh´erences g´eom´etriques r´esolues dans [MWS+06] . . . 55
1.19 Exemples de bˆatiments g´en´er´es par BatiMan [Cha98] . . . 56
1.20 Exemple de bˆatiment g´en´er´es par AGETIM [LLGC+05] . . . 56
1.21 3 solutions au probl`eme de Maculet [Mac91] . . . 58
1.22 Exemples de r´esultats obtenus par EAAS [Cha95] . . . 59
1.23 Deux solutions g´eom´etriques diff´erentes avec la mˆeme topologie [MY01] . . . 60
1.24 Sc`ene comprenant environ 500 objets g´en´er´ee en 25min grˆace `a CAPS (par pla-cement et ajustements interactifs) . . . 63
1.25 Exemples de r´esultats de WordsEyes `a partir de descriptions textuelles`e. . . 64
1.26 Oranos dans DEM2ONS . . . 67
1.27 Un exemple de sc`ene g´en´er´ee par Manhattan [LRG03] . . . 69
1.28 Probl`eme de placement bidimensionnel dans un environnement fig´e [LR03] . . . . 71
1.29 Image reconstruite `a partir des r´esultats obtenus avec le solveur DEMONS-GA [SRGL03] . . . 73
2.1 Exemples de vall´ees et plateaux . . . 86
2.2 Importance du choix de la caract´eristique tabou. . . 88
2.3 Somme de Minkowski . . . 98
2.4 Soustraction de Minkowski . . . 99
2.5 Occupation au sol : rectangle englobant (gauche) et enveloppe convexe (droite) . 100 2.6 Choix des contraintes `a satisfaire lors de l’ajout d’un nouvel objet dans la sc`ene. 101 2.7 Contraintes d’orientation . . . 104
2.8 Probl`emes faciles et difficiles. . . 106
2.9 Distances minimale et maximale entre le point de r´ef´erence et l’enveloppe dans le cas d’un rectangle . . . 107
2.10 Premi`ere sc`ene r´esultat . . . 108
2.11 Seconde sc`ene r´esultat . . . 109
2.12 Interface de DEMONS LE . . . 110
3.1 De haut en bas : donn´ees d’entr´ee (embase de bˆatiment), premi`ere ´etape de d´erivation, pr´eparation des extrusions et bˆatiment final. . . 113
3.2 D´etails du bˆatiment d´ecrit dans la Figure 3.1. . . 116
3.3 Diagramme de classes de notre syst`eme de g´en´eration de fa¸cades . . . 116
3.4 Un exemple de suppression des faces de fond d’un pan de mur . . . 119
3.5 Exemple de mur `a bordures. . . 120
3.6 Mur extrud´e avec une profondeur n´egative. . . 121
3.7 Un exemple de mur extrud´e r´ef´eren¸cant un objet tridimensionnel (les piliers au premier plan). . . 121
3.8 Un exemple de grille de mur horizontale. . . 122
3.9 Un exemple de grille de mur bidirectionelle. . . 122
3.10 Un exemple de liste de mur. . . 123
3.11 R`egle de redimensionnement pour une liste de murs verticales. . . 124
3.12 Les trois diff´erents types de gabarits de fondations. De gauche `a droite, z min, z max et extrud´e. . . 125
3.13 Axe m´edian (au centre) et squelette droit (`a droite) d’un polygone simple . . . . 127
3.14 Vue de profil d’un toit `a deux pentes standard. . . 128
3.15 Vue de profil d’un toit `a deux pentes mansard´e. . . 128
3.16 Vue de profil d’un toit `a deux pentes de type grange. . . 128
3.17 Exemples de toits g´en´er´es par diff´erents gabarits de toits `a deux pentes. De gauche ` a droite : deux pentes standard, mansard´e, grange. . . 129
3.18 Vue de profil d’un toit `a quatre pentes de type porche. . . 130
3.19 Vue de profil d’un toit `a quatre pentes de type alsacien. . . 130
3.20 Exemples de toits pour divers gabarits de toits `a quatre pentes. De gauche `a droite : quatre pentes standard, mansard´e, pagode, porche, alsacien. . . 131
3.21 Trois bˆatiments g´en´er´es `a partir de la mˆeme embase. . . 132
3.23 Zone urbaine constitu´ee de 17 362 bˆatiments, la g´en´eration s’effectue en 7mn 55 sec pour 920 182 faces . . . 134 3.24 Exemple de bˆatiment g´en´er´e `a partir du gabarit de fa¸cades d´ecrit en 3.4.3. . . 135 3.25 Exemple de grammaire utilis´ee pour g´en´erer le bˆatiment pr´esent´e dans la Figure
3.24. . . 136 3.26 D´etails des diff´erents pas de d´erivations n´ecessaires `a la cr´eation du bˆatiment
pr´esent´es dans la Figure 3.25 . . . 137
1 Cette image montre l’espace perdu `a cause des ouvertures pour le placement des meubles . . . 142 2 Exemple des donn´ees multim´edia disponibles pour la place du Capitole `a Toulouse
au sein du logiciel Google Earth . . . 143 3 Exemple de zones urbaines g´en´er´e en couplant notre syst`eme de g´en´eration de
bˆatiments avec le prototype de notre m´ethode de g´en´eration de r´eseau routier. . 144 4 Exemple de partition d’un ´etage de bˆatiment en pi`eces par notre m´ethode. . . 145
C.1 Plante g´en´er´ee par un L-System simple . . . 158
D.1 La mod´elisation d´eclarative : un domaine pluri-disciplinaire. Sch´ema initial par Champciaux [Cha98], ´etendu par Gaildrat [Gai03] . . . 162 D.2 Les trois phases de la mod´elisation d´eclarative [CDMM97]. . . 163 D.3 Interaction multimodale. . . 164
E.1 Plan et vue crystal view d’une maison cr´ee par Architecte 3D (Punch Software) 167 E.2 Plan et fa¸cade d’une maison cr´ee par Architecte et Construction 3D (Anuman
Interactive) . . . 168 E.3 Exemple d’interface graphique, 3D Architecte Expert CAD 2008 (´edit´e par Micro
Application) . . . 168 E.4 Exemple de rendu final, 3D Architecte Expert CAD 2008 (´edit´e par Micro
Glossaire
Sigles
CAO Conception assist´ee par ordinateur
CAPS Constraint-based Automatic Placement System : Syst`eme de placement automatique bas´e sur les contraintes
CSP Constraint Satisfaction Problem : Probl`eme de satisfaction de contraintes DEM2ONS DEclarative Multimodal MOdeliNg System
DHNCSP Dynamic Hierarchic Numeric CSP
EAAS Environnement d’aide `a l’am´enagement spatial MGII Mod´elisation g´eom´etrique et infographie interactive IA Intelligence artificielle
IHM Interaction Homme Machine
IRIN Institut de recherche en informatique de Nantes IRIT Institut de recherche en informatique de Toulouse RO Recherche op´erationnelle
RV R´ealit´e virtuelle
SIRV Synth`ese d’images et r´ealit´e virtuelle
Mod´
elisation d´
eclarative
CSP L’approche probl`eme de satisfaction de contraintes (CSP) [Mac77] est une famille de tech-niques constructives g´en´erales. Cette approche est constructive : la solution est construite
graduellement. Comme ces algorithmes sont bas´es sur un processus d’´enum´eration, ils sont d´eterministes et exhaustifs donc complets. Un CSP est un triplet P = (V, D, C) d´efini par : – un ensemble de variables V = X1, ..., Xn.
– un ensemble de domaines D = D1, ..., Dn, o`u Di un ensemble de valeurs, est le domaine
associ´e `a la variable Xi.
– un ensemble de contraintes C = C1, ..., Cm, o`u Ci est une contrainte d´efinie par une
relation sur un sous-ensemble des variables.
D´eictique El´ement de linguistique qui sert `a montrer, `a d´esigner un objet singulier d´etermin´e dans la situation.
Isoth´etique Parall`ele ou perpendiculaire aux axes du syst`eme de coordonn´ees cart´esiennes de notre monde virtuel.
Mod´elisation d´eclarative La mod´elisation d´eclarative est un cadre conceptuel pour la concep-tion assist´ee de sc`enes ou de formes virtuelles. Son but est de soulager l’utilisateur lors de la tˆache de conception en rendant possible la description d’un mod`ele par le biais de commandes d’un haut niveau d’abstraction, le lib´erant ainsi du mod`ele g´eom´etrique sous-jacent. Trois phases principales peuvent ˆetre distingu´ees lors de l’utilisation d’un modeleur d´eclaratif :
1. la phase de description durant laquelle l’utilisateur d´ecrit la sc`ene en ´enon¸cant un ensemble de commandes de haut niveau, appel´ees propri´et´es dans la plupart des modeleurs d´eclaratifs ;
2. la phase de g´en´eration qui calcule les solutions correspondantes [LDG05] ;
3. la phase de prise de connaissances qui permet `a l’utilisateur de visualiser et de choisir une solution particuli`ere dans le cas de l’exploration d’un domaine de recherche. Ces trois phases sont parcourues successivement au sein d’un processus it´eratif en spirale, i.e. l’utilisateur peut affiner sa description en fonction des solutions obtenues.
Multimodal Combinant souris, clavier, geste, reconnaissance parole, casque de R´ealit´e Vir-tuelle pour construire un seul ´ev´enement multimodal `a partir de divers ´ev´enements mono-modaux.
NP complet Non d´eterministe polynˆomial complet
M´
etaheuristiques
Backtrack Retour arri`ere, m´ethodes permettant de revenir en arri`ere afin de corriger la variable qui bloque la recherche de la solution
Configuration compl`ete Affectation de toutes les variables (les contraintes ne sont, a priori, pas satisfaites).
Heuristique M´ethode con¸cue pour un probl`eme d’optimisation donn´e, qui produit une solution non n´ecessairement optimale lorsqu’on lui fournit une instance d’un probl`eme.
M´ecanisme d’exploration Proc´edure qui pr´ecise comment passer d’une configuration A `a une autre configuration A’ appartenant au voisinage de A.
Mouvement Op´eration ´el´ementaire permettant de passer d’une solution A `a une solution A’ voisine de A.
Optimisation combinatoire Consiste `a trouver le meilleur choix entre un nombre fini de choix. Autrement dit, minimiser une fonction, avec contraintes, sur un ensemble fini. Plateau Ensemble de solutions de mˆeme coˆut, connexes par voisinage.
Solution Affectation de toutes les variables (les contraintes ne sont, a priori, pas satisfaites). Solution optimale Solution optimisant la valeur de la fonction de coˆut.
Voisinage de A Ensemble des solutions A’ accessibles `a partir de A en r´ealisant un seul mou-vement.
G´
en´
eration urbaine
SIG Un syst`eme d’information g´eographique (SIG) permet de g´erer des donn´ees alphanum´ eri-ques spatialement localis´ees, ainsi que les donn´ees graphiques permettant d’afficher ou d’imprimer plans et cartes. Ses usages couvrent les activit´es g´eomatiques de traitement et diffusion de l’information g´eographique.
Le rˆole du syst`eme d’information est de proposer une repr´esentation plus ou moins r´ealiste de l’environnement spatial en se basant sur des primitives graphiques telles que des points, des vecteurs (arcs), des polygones ou des maillages (raster). `A ces primitives sont associ´ees des informations qualitatives telles que la nature (route, voie ferr´ee, forˆet, etc.) ou toute autre information contextuelle.
L’information g´eographique peut ˆetre d´efinie comme l’ensemble de la description d’un objet et de sa position g´eographique `a la surface de la Terre.
En France, dans son acceptation courante, le terme fait r´ef´erence aux outils logiciels. Cependant, le concept englobe l’ensemble constitu´e par les logiciels, les donn´ees, le mat´eriel et les savoir-faire li´es `a l’utilisation de ces derniers.
Introduction
Cette th`ese s’inscrit dans le cadre d’une collaboration CIFRE entre le groupe de recherche VORTEX (Visual Objects : from Reality To EXpression) de l’IRIT (Institut de Recherche en Informatique de Toulouse) d’une part, et la soci´et´e Oktal Synthetic Environment (c.f. Annexe A) d’autre part.
Le groupe de recherche VORTEX1 aborde par ses diff´erents travaux l’ensemble des probl´
emati-ques des objets visuels, qu’il s’agisse d’images, de vid´eos, de sc`enes 2D et 3D. Ces probl´ematiques englobent les m´ethodes, les mod`eles et les outils utilis´es pour traiter les objets visuels, r´eels, virtuels et mixtes, en allant jusqu’`a les doter, par cr´eation ou par enrichissement, d’´el´ements permettant de les utiliser. Tout utilisateur, qu’il soit scientifique, ing´enieur, artiste, formateur ou m´edecin peut alors s’exprimer, ind´ependamment de son niveau de maˆıtrise technique. Au sein du groupe de recherche VORTEX, la composante Mod´elisation, encadr´ee par V´eronique Gaildrat, ´etudie les outils de mod´elisation d’environnements virtuels, et plus pr´ecis´ement les outils de mod´elisation d´eclarative (cf. Figure 1). Ces travaux sur la mod´elisation d´eclarative s’int`egrent dans une chaˆıne compl`ete de production d’images de synth`ese, en apportant une aide au concepteur dans la cr´eation d’objets et de sc`enes. Au final, le processus aboutit `a la cr´eation d’un environnement virtuel dans lequel le concepteur-utilisateur pourra ensuite ´evoluer. Le pro-jet DEM2ONS (DEclarative Multimodal MOdeliNg System) regroupe les travaux de recherche autour de la mod´elisation d´eclarative. Ces travaux ont conduit au d´eveloppement de plusieurs syst`emes de g´en´eration qui ont permis d’´evaluer la pertinence de diff´erentes approches pour le placement contraint d’objets dans une sc`ene tridimensionnelle.
1Cr´e´e en 2007 par la fusion des ´equipes SIRV (Synth`ese d’Images et R´ealit´e Virtuelle) et VPCAB (VISION PAR CALCULATEUR ANDRE BRUEL).
Contrairement aux approches classiques (ou imp´eratives) qui n´ecessitent des donn´ees num´eriques en entr´ee, la mod´elisation d´eclarative offre la possibilit´e de d´ecrire une entit´e ou une sc`ene `a mod´eliser en exprimant une simple image mentale de la sc`ene (cette image peut ˆetre floue). Le concepteur n’a qu’`a ´enoncer les attributs g´eom´etriques, photom´etriques et physiques de l’environnement ainsi que les relations entre ces ´el´ements dans un langage quasi-naturel. Ces propri´et´es permettent, `a l’aide d’un ordre unique, de r´ealiser une op´eration qui aurait demand´e un nombre important d’actions ´el´ementaires avec un modeleur g´eom´etrique imp´eratif classique. Ces propri´et´es sont ensuite interpr´et´ees en contraintes r´esolues par le syst`eme de g´en´eration pour fournir un mod`ele solution (cf Figure 1). Le but de la mod´elisation d´eclarative n’est pas de se substituer `a la mod´elisation g´eom´etrique imp´erative, mais plutˆot de l’enrichir en four-nissant des m´ecanismes permettant de faciliter la g´en´eration de sc`enes r´ealistes. Pour cela, la mod´elisation d´eclarative cherche `a tirer parti de toutes les informations s´emantiques sur l’en-vironnement et les objets `a placer, de fa¸con `a automatiser le mieux possible ce placement, en ´
evitant au concepteur des tˆaches r´ep´etitives et fastidieuses. En plus de permettre un maniement accessible `a tous, le recours `a la mod´elisation d´eclarative engendre donc un gain de temps certain.
Le second initiateur de cette th`ese est la soci´et´e Oktal SE. Cette soci´et´e a d´evelopp´e une gamme d’outils de visualisation capables d’effectuer des rendus d’une mˆeme sc`ene dans plusieurs do-maines spectraux : infrarouge (bande I, II et III), radar, BNL (bas niveau de lumi`ere), acoustique et bien sˆur visible. Pour g´en´erer ces sc`enes, Oktal SE utilise un modeleur de terrain multi-senseur appel´e AGETIM (Atelier de GEn´eration de TerraIn Multi senseur). Le logiciel AGETIM per-met de g´en´erer un environnement virtuel 3D `a des fins de simulation ou de mod´elisation `a un niveau de r´ealisme fix´e par l’utilisateur. Ce logiciel fournit des moyens d’int´egration de donn´ees cartographiques existantes, de correction ou d’enrichissement de ces donn´ees, des processus de g´en´eration automatique d’environnement virtuel 3D et d’exploitation simple de cet environne-ment. Afin d’offrir une plus grande simplicit´e d’utilisation et une ergonomie adapt´ee au traite-ment de l’information cartographique h´et´erog`ene, l’outil AGETIM s’appuie sur un standard en mati`ere de Syst`emes d’Information G´eographique (SIG), le logiciel GEOCONCEPT.
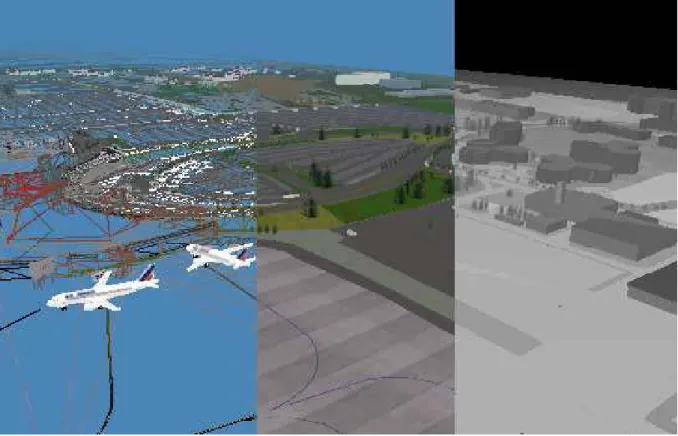
Les bases de donn´ees 3D g´en´er´ees en utilisant AGETIM peuvent ˆetre tr`es ´etendues : la plus vaste couvre actuellement le quart du territoire fran¸cais. Elles peuvent ´egalement ˆetre tr`es d´etaill´ees, en incluant par exemple les murs int´erieurs et le mobilier des bˆatiments. La Figure 2 pr´esente trois repr´esentations des alentours de l’a´eroport de Toulouse-Blagnac : repr´esentation vectorielle
Figure 2. Visualisation vectorielle, visible et infrarouge d’une partie de l’a´eroport de Blagnac qui donne un aper¸cu de la complexit´e g´eom´etrique de la sc`ene, repr´esentation dans le domaine visible et enfin une repr´esentation en infrarouge.
Comme on peut le constater sur la Figure 2, la mod´elisation des alentours de l’a´eroport apporte une r´eelle plus value afin d’observer l’objet de l’´etude dans son environnement naturel. Ne pas int´egrer l’environnement imm´ediat au sujet ´etudi´e, fait courir le risque aux utilisateurs de ne pas prendre en compte les influences de l’environnement proche dans leur analyse et ce, quelque soit la qualit´e de la mod´elisation du sujet principal. Par exemple, si l’on se restreint `a une visualisation dans le domaine visible, la pr´esence de l’environnement permet de se rendre r´eellement compte des notions d’´echelles, de visibilit´e ou de distance. La mod´elisation du voisinage est encore plus critique dans le cadre d’une visualisation dans les domaines infrarouge, ´electromagn´etiques ou BNL (bas niveau de lumi`ere, i.e. vision nocturne). Une visualisation ´electromagn´etique qui ne prendrait pas en compte des syst`emes radars situ´es `a l’´ecart des bˆatiments principaux de l’a´eroport perdrait en r´ealisme.
1
Objectifs de l’´
etude
Cette th`ese a pour but d’´etudier la possibilit´e d’enrichir AGETIM avec des modules de g´en´eration automatique de zones urbaines.
En effet, lors de l’expression d’un besoin en terme de mod´elisation, il n’est pas rare que le client soit sensible au fait qu’en plus de la mod´elisation fine (et exacte) de son sujet d’int´erˆet, ses abords soient aussi mod´elis´es. Par exemple, si la mairie de Toulouse lance un appel d’offre concernant la maquette 3D du Capitole (qui regroupe l’hˆotel de ville et l’op´era de Toulouse), un prestataire capable de fournir non seulement ce bˆatiment, mais aussi un trajet pi´etonnier autour du centre d’int´erˆet avec des bˆatiments cr´edibles, b´en´eficie de solides atouts pour emporter le march´e. Cependant, mˆeme si le voisinage du centre d’int´erˆet n’a pas `a ˆetre finement mod´elis´e, il reste que la surface et le volume occup´es par le voisinage sont g´en´eralement bien plus impor-tants que ceux du centre d’int´erˆet. Il est donc n´ecessaire d’ˆetre capable de g´en´erer rapidement un ensemble de bˆatiments g´eosp´ecifiques2, reprenant globalement les dimensions des bˆatiments r´eels, leurs aspects et d´ecorations (balcons, renfoncements, etc.).
La mod´elisation de vastes bases de donn´ees 3D pr´esente aussi un besoin particulier en terme de mod´elisation de zone urbaine. Une des r´ealisations d’AGETIM a notamment consist´e `a mod´eliser un quart du territoire fran¸cais `a des fins de simulation a´eriennes. Une telle surface contient un grand nombre de zones urbaines, allant du hameau `a la capitale r´egionale. Les outils de mod´elisation actuels (dont fait partie AGETIM) sont capables de traiter les bases de donn´ees car-tographiques afin de g´en´erer des maquettes virtuelles repr´esentant les ensembles g´eographiques existants :
– reliefs,
– cours d’eau et lacs, – contours maritimes.
Les outils plus avanc´es sont capables de repr´esenter les forˆets ainsi que les r´eseaux routiers. Selon la finesse des bases de donn´ees cartographiques utilis´ees, les informations disponibles concernant les zones urbaines peuvent ´enorm´ement varier. Voici un aper¸cu des informations disponibles, class´ees de la plus vague `a la plus pr´ecise :
– seules les limites de la zone urbaine sont disponibles, sous forme d’un polygone, – ses grands axes de circulation sont pr´esents (ou esquiss´es),
2
– des axes interm´ediaires sont disponibles, et on observe un classement par rˆole des parties de cette ville (habitations, bureaux, industrie, centre commercial, espace vert, lac, etc.),
– la totalit´e du r´eseau routier est disponible, avec ´egalement les plans cadastraux (la limitation des parcelles),
– enfin, on peut disposer dans le cas le plus pr´ecis, des contours ext´erieurs de tous les bˆatiments, voire de leurs hauteurs.
Cette liste montre bien la difficult´e inh´erente `a l’int´egration d’un outil de g´en´eration de zone urbaine au sein d’un modeleur de terrain. Cet outil doit ˆetre capable de prendre en compte des donn´ees parcellaires, potentiellement erron´ees. En plus des capacit´es d’analyse et de rectification de la donn´ee source, un outil de g´en´eration de zones urbaines doit ˆetre capable de cr´eer des informations cr´edibles. Ces informations ainsi cr´e´ees doivent ˆetre g´eotypiques3 afin de ne pas perturber l’utilisateur parcourant la base de donn´ees.
Le premier objectif de cette th`ese est de r´ealiser une ´etude des solutions existantes pour r´epondre `
a ces deux besoins :
– ˆetre capable de g´en´erer des zones urbaines `a partir d’informations g´eosp´ecifiques disponibles, – ˆetre capable de cr´eer de la donn´ee source g´eotypique.
Dans un second temps, nous avons d´ecid´e de d´evelopper nos axes de travail en fonction de l’int´erˆet potentiel d’un nouveau travail de recherche par rapport aux m´ethodes existantes ainsi qu’aux besoins sp´ecifiques d’AGETIM.
2
Cadre de l’´
etude
Les progr`es r´ecents des applications de r´ealit´e virtuelle, des jeux vid´eo ainsi que des simulations d’expansion urbaine ont augment´e la pertinence de l’utilisation de maquettes virtuelles pour les ´
etudes d’urbanisme. Par exemple, la croissance des cit´es entraˆıne des probl`emes ´emergents qui n´ecessitent la mise en place d’outils de pr´evision. Des mod`eles peuvent permettre de prendre en compte l’influence des radiations ´electromagn´etiques, la pr´ediction de la propagation du bruit par des mod`eles de pollution sonore ou encore l’anticipation des r´eseaux de transports n´ecessaires. Par ailleurs, la prochaine g´en´eration de Syst`emes Globaux de Navigation par Satellite (SGNS) tirera avantage de l’utilisation de mod`eles de villes tridimensionnels. Ainsi, ˆetre capable de
g´en´erer rapidement des mod`eles de villes cr´edibles permettra d’aider l’utilisateur `a effectuer ses ´etudes de fa¸con plus rapide et plus efficace.
La mod´elisation d´etaill´ee de zones urbaines repr´esente un d´efi en informatique graphique. Une ville r´eelle r´epond `a des r`egles de construction (implicites ou explicites) et refl`ete souvent de multiples influences historiques, culturelles et sociales `a travers le temps. Atteindre une pr´ecision suffisante pour qu’une ville virtuelle soit cr´edible pour un utilisateur la visitant au niveau du sol, demande une mod´elisation extrˆemement d´etaill´ee qui exige bien trop de temps et d’efforts de la part du concepteur. La capacit´e `a g´en´erer rapidement des maquettes virtuelles cr´edibles permet de r´epondre `a ce besoin et constitue donc un sujet d’avenir qui doit se d´evelopper car les r´esultats actuels ne satisfont pas les besoins pr´ec´edemment d´efinis.
3
Structure du rapport
Ce m´emoire s’articule en trois parties, ´etat de l’art, placement automatique d’objets et enfin g´en´eration de automatique de zones urbaines.
3.1 Etat de l’art
La premi`ere partie de ce m´emoire propose un ´etat de l’art des m´ethodes existantes permettant la g´en´eration, automatique ou non, de zones urbaines.
Une zone urbaine repr´esente, la plupart du temps, un ensemble de donn´ees trop important pour ˆetre appr´ehend´e, mod´elis´e ou mˆeme visualis´e directement. Utiliser une approche multi-r´esolution, `a base de structures logiques imbriqu´ees, permet de d´ecomposer directement cet ensemble en niveaux de d´etail successifs, afin de permettre un traitement plus cibl´e. Il s’agit ici de niveaux de d´etail logiques et non pas uniquement de niveaux de d´etail comme objets de substitution lors d’une visualisation tridimensionelle. La pertinence de l’approche multi-r´esolution, nous am`ene `a pr´esenter un ´etat de l’art des diff´erentes techniques mises en œuvre pour g´en´erer automatiquement une zone ur baine, conform´ement au d´ecoupage en niveau de d´etail.
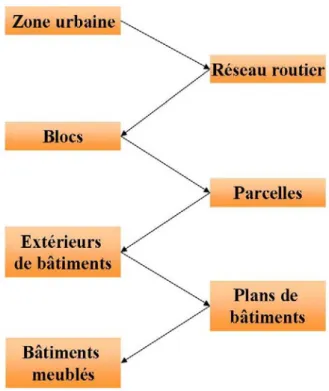
La Figure 3 pr´esente un d´ecoupage hi´erarchique de la tˆache de g´en´eration d’une ville en sept ´etapes. Inspir´e par les travaux de Parish et M¨ueller dans [PM01], ce d´ecoupage est utilis´e comme plan de cet ´etat de l’art pour exposer les diff´erentes m´ethodes existantes. Certains travaux couvrent plusieurs ´etapes, ils seront donc cit´es plusieurs fois. En fonction de la complexit´e de
Figure 3. D´ecomposition hi´erarchique de la g´en´eration d’une ville
chaque ´etape, nous proposons une br`eve pr´esentation du formalisme et des donn´ees trait´ees ainsi qu’une discussion sur les m´ethodes de g´en´eration pr´esent´ees. Une ´etape peut ˆetre assimil´ee `a un niveau de d´etail lors d’une repr´esentation multi-´echelle de la ville.
3.2 Placement automatique d’objets
Nous avons ensuite ´etudi´e le probl`eme de placement d’objets, qui correspond `a la derni`ere des ´
etapes pr´esent´ees `a la Figure 3. Cette ´etape prend la suite de travaux d´ej`a effectu´es au sein de notre ´equipe. Nous pr´esentons dans cette partie une ´etude de l’application de m´ethodes issues de la recherche locale pour r´esoudre le placement d’objets au sein d’un probl`eme mod´elis´e par des contraintes. Les objets trait´es sont d´efinis par l’enveloppe convexe de leur projection orthogra-phique au sol, et peuvent prendre une orientation quelconque. Pour pouvoir prendre en compte ces deux particularit´es, nous avons eu recours aux op´erateurs de Minkowski sur les polygones convexes pour le calcul de la validit´e de nos contraintes.
Nous pr´esentons le modeleur d´eclaratif DEMONS LE qui a ´et´e d´evelopp´e pour ´evaluer la per-tinence de cette approche. Ce modeleur est une variante du modeleur DEM2ONS d´evelopp´e pr´ec´edemment dans notre ´equipe. Ce d´eveloppement a servi de base `a l’´evaluation de l’utilisa-tion des m´etaheuristiques issues de la recherche locale ainsi que des op´erateurs de Minkowski.
De plus, ce travail nous a permis de proposer la possibilit´e `a un utilisateur, non expert dans la mod´elisation 3D, de g´en´erer facilement, rapidement et intuitivement des sc`enes complexes. Ceci se traduit non seulement au niveau de la sp´ecification de l’interface utilisateur, mais ´egalement dans l’expression des propri´et´es entre les objets de la sc`ene.
3.3 G´en´eration automatique d’ext´erieur de bˆatiment
Le troisi`eme chapitre s’attache `a pr´esenter l’outil que nous avons d´evelopp´e dans le cadre de cette th`ese pour la g´en´eration automatique de bˆatiments (sans int´erieurs). Cet outil a pour but de cr´eer la maquette num´erique d’un bˆatiment, d´ecompos´e en fondations, fa¸cades et toits. Notre m´ethode est bas´ee sur la d´efinition de gabarits de bˆatiments qui sont appliqu´es `a des descriptions de bˆatiments. Une description est constitu´ee de l’embase tridimensionnelle, de la hauteur de toit et de la hauteur des murs du bˆatiment. Nous proposons plusieurs modes de g´en´eration pour chacune de ces composantes. La contribution la plus notable de cette partie est la g´en´eration des fa¸cades de bˆatiments `a partir de gabarits de fa¸cades. Les fa¸cades de bˆatiments sont cr´e´ees en utilisant une grammaire de murs tridimensionnelle isom´etrique, bas´ee sur un ensemble de r`egles. Ces r`egles peuvent ˆetre simples ou tr`es d´etaill´ees en fonction des besoins de l’utilisateur. La Figure 4 pr´esente un exemple de r´esultat obtenu avec notre outil de g´en´eration de fa¸cades de bˆatiments. Nous pouvons y voir les d´etails de deux fa¸cades de bˆatiments qui entourent la place du Capitole `a Toulouse. Les textures utilis´ees pour le rez-de-chauss´ee correspondent aux devan-tures r´eelles. Une fois l’arche de l’arcade mod´elis´ee manuellement, toute la g´eom´etrie restante (notamment les d´ecrochements autour de chaque fenˆetre) a ´et´e g´en´er´ee de fa¸con automatique par notre outil. Le gabarit ainsi cr´e´e, bien que correspondant `a un bˆatiment r´eel, peut ˆetre appliqu´e `a une description quelconque de bˆatiment, et s’y adaptera au mieux, en faisant varier le nombre d’´etages ou de fenˆetres dans les limites permises par le gabarit.
3.4 Annexes
Afin de faciliter la lecture et la compr´ehension des trois principaux chapitres de ce m´emoire, nous avons report´e en annexe un certain nombre de d´efinitions et descriptions.
L’annexe A pr´esente la soci´et´e Oktal Synthetic Environment ainsi que ses activit´es.
L’annexe B propose une d´efinition et un aper¸cu de l’approche CSP (probl`eme de satisfaction de contrainte) qui est utilis´ee dans certains travaux de notre ´etat de l’art (notamment la g´en´eration de plans de bˆatiments ainsi que les probl`emes d’am´enagement d’int´erieurs).
L’annexe C pr´esente les L-System, auxquels font appel les ´etapes de g´en´eration de r´eseau urbain et fa¸cades de bˆatiments.
L’annexe E d´ecrit certains logiciels du commerce permettant de cr´eer des mod`eles num´eriques de bˆatiments.
L’annexe D pr´esente les concepts et les d´efinitions relatifs `a la mod´elisation d´eclarative utilis´ee pour la g´en´eration de bˆatiments et le placement des objets dans les pi`eces.
Chapitre 1
Etat de l’art relatif `
a la g´
en´
eration
d’environnements urbains
Dans ce chapitre, nous utilisons le terme g´en´erique de ville pour d´esigner une zone dans laquelle on trouve un r´eseau routier et des bˆatiments. Cette zone peut aussi bien d´efinir un hameau qu’une m´egapole.
1.1
Zone urbaine
La g´en´eration d’une ville n´ecessite au minimum de connaˆıtre ses limites physiques (ou g´ eogra-phiques). Nous consid´erons comme niveau le plus vague d’information, la d´efinition de la surface que couvre (ou doit recouvrir) cette ville.
Cette information est g´en´eralement d´efinie au sein d’un SIG (Syst`eme d’Information G´ eo-graphique). Il est ´egalement possible de contraindre la d´efinition de la zone urbaine afin de prendre en compte des donn´ees suppl´ementaires en entr´ee. Ces informations compl´ementaires sont g´en´eralement donn´ees sous forme de cartes :
– altim´etriques : les routes sont g´en´eralement perpendiculaires ou parall`eles aux lignes de ni-veaux ;
– hydrographiques (surfaciques : mer, lac, ´etang, delta, etc. ou vectorielles : fleuve, rivi`ere) : le r´eseau routier traite diff´eremment ces zones, en les ´evitant, ou en les traversant (pont ou tunnel) ;
– de densit´e de population : cette donn´ee modifie de deux fa¸cons le r´eseau routier, premi` ere-ment, le r´eseau routier secondaire est affect´e (rue, r´esidence), ensuite le r´eseau routier primaire pr´esente des axes `a plusieurs voies qui relient les zones `a forte densit´e de population (auto-routes, voies rapides) ;
– de sch´emas de construction de r´eseau routier.
A partir des informations donn´ees lors de la d´efinition de la zone urbaine, les diff´erentes ´etapes de g´en´eration permettent de mod´eliser la ville dans son int´egralit´e. La premi`ere de ces ´etapes, qui g´en`ere le r´eseau routier, est la seule `a traiter la zone urbaine dans son ensemble. Les deux ´
etapes suivantes, qui g´en`erent les blocs et les parcelles, r´ealisent deux partitions successives de la zone urbaine ce qui permet de r´eduire la complexit´e de ces tˆaches. Enfin, les trois derni`eres ´
etapes traitent des bˆatiments, de la g´en´eration des ext´erieurs (fa¸cades, fondations et toits), `a celle des plans de bˆatiments pour finir avec le placement de mobilier au sein des pi`eces.
1.2
R´
eseau routier
1.2.1 Pr´esentation
La forme la plus couramment rencontr´ee pour repr´esenter les r´eseaux routiers est le graphe. Un graphe valu´e permet de stocker, en plus de la g´eom´etrie, des informations telles que la densit´e de trafic, le nombre et la largeur des voies ou leur sens de circulation. Les algorithmes existants en th´eorie des graphes permettent d’obtenir des donn´ees suppl´ementaires, comme par exemple, le plus court chemin d’un point `a un autre.
Mˆeme s’il paraˆıt illusoire de tenter de caract´eriser les villes existantes selon des sch´emas pr´ed´efinis de trac´e de routes, certains sch´emas, notamment ceux pr´esent´es dans la Figure 1.4 peuvent ˆ
etre utilis´es lors de la g´en´eration. On peut, par exemple, constater que la plupart des villes am´ericaines sont con¸cues selon un sch´ema de damier, tandis que les villes europ´eennes reposent plus souvent sur un sch´ema radiocentrique. N´eanmoins, ces observations sont `a pond´erer par le fait que la structure d’une ville est amen´ee `a ´evoluer dans le temps en fonction de contraintes g´eographiques, sociales et ´economiques. En pratique, on observe plutˆot une composition de sch´emas au sein d’une mˆeme ville. La Figure 1.1 montre un r´eseau routier qui pr´esente la composition de plusieurs sch´emas, principalement les sch´emas radiocentriques et en damier.
On reconnaˆıt en bas de l’image deux noyaux de sch´emas routier radiocentriques. Tandis que les quartier au nord pr´esentent les caract´eristiques de sch´emas routiers en damier.
1.2.2 M´ethodes issues de l’analyse d’image
1.2.2.1 Extraction du r´eseau routier
Il existe trois familles de m´ethodes d’extraction de r´eseaux routiers `a partir d’image (photogra-phique ou radar) :
– les m´ethodes d’extraction locale ; – les m´ethodes de poursuite ;
– les m´ethodes de reconnexion de graphes.
Dans la plupart des approches, le probl`eme peut ˆetre ramen´e `a un probl`eme d’extraction de structures lin´eaires.
1.2.2.2 Les m´ethodes locales
Ce premier type de m´ethode vise `a d´etecter dans une image des zones pr´esentant les ca-ract´eristiques locales d’une route. Ces m´ethodes recherchent des segments (ou des points) pou-vant appartenir `a des routes. En pratique, on simplifie le probl`eme initial de d´etection des tron¸cons de routes en un probl`eme de d´etection de structures lin´eaires fortement contrast´ees avec leur voisinage imm´ediat (i.e. de radiom´etrie fonc´ee ou claire).
Les principales m´ethodes locales reposent sur la morphologie math´ematique [CML01] ou la trans-form´ee de Hough [DG02]. Ces m´ethodes ne sont, la plupart du temps, pas capables de d´etecter le r´eseau routier dans sa totalit´e, mais elles sont en mesure d’en trouver les portions princi-pales. Elles peuvent cependant g´en´erer un taux significatif d’erreur. Les m´ethodes locales sont rarement utilis´ees seules, toutefois, elles pr´esentent un int´erˆet certain en r´ealisant un traitement initial des donn´ees pour obtenir une amorce de r´eseau routier.
Nous allons `a pr´esent d´etailler les m´ethodes de poursuite et de reconnexion, des algorithmes de plus haut niveau qui peuvent utiliser cette amorce pour r´ealiser l’extraction de la totalit´e du r´eseau routier.
1.2.2.3 Les m´ethodes de poursuite
Ces m´ethodes d’extraction sont bas´ees sur le suivi de structures. Elles sont it´eratives et ont pour principe le chaˆınage successif de tous les pixels d’une structure en partant d’une amorce. Pour chaque section de la structure lin´eaire d´ecrivant le r´eseau routier en cours d’extraction, le syst`eme s’efforce de choisir le prochain pixel qui permettra de faire croˆıtre cette structure.
Les m´ethodes de poursuite ont en commun la n´ecessit´e de connaˆıtre une structure initiale (potentiellement ponctuelle). Celle-ci peut avoir ´et´e renseign´ee par l’utilisateur ou obtenue de fa¸con automatique par une des m´ethodes locales pr´ec´edemment d´ecrites. Ces algorithmes pr´esentent l’avantage (propre aux algorithmes it´eratifs) d’´evoluer de fa¸con autonome. Cepen-dant, ils peuvent ˆetre d´elicats `a contrˆoler si les crit`eres de poursuite n’ont pas ´et´e correctement d´efinis (en fonction du type de r´eseau routier).
Parmi les m´ethodes de poursuite, nous pouvons par exemple citer les m´ethodes dites de suivi structurel (ou de ”tracking”) [GJ96] et celles `a base de programmation dynamique [GL95].
1.2.2.4 Les m´ethodes de reconnexion
Ces m´ethodes r´ealisent l’extraction du r´eseau routier par reconnexion de graphes. Elles sont utilis´ees principalement en sortie des m´ethodes de poursuite et des m´ethodes locales, car elles permettent de lever deux des d´efauts inh´erents `a ces m´ethodes.
Premi`erement, les m´ethodes de reconnexion permettent de valider les r´esultats en supprimant les fausses alarmes (d´etection d’erreur). Deuxi`emement, elles sont `a mˆeme de compl´eter un r´esultat en connectant divers tron¸cons de la mˆeme route. Les m´ethodes de reconnexion reposent sur l’utilisation de la topologie des objets `a extraire, et permettent, dans notre cas, de passer d’un r´esultat compos´e d’une nu´ee de tron¸cons de routes `a la repr´esentation globale d’un r´eseau routier.
De nombreux travaux sont class´es parmi ces m´ethodes : certains reposent sur une approche baye-sienne [Tup97], d’autres sur l’approche des processus ponctuels marqu´es [Sto01], sur la logique floue [WHMJ98] ou encore les algorithmes g´en´etiques [HL01].
Les diff´erentes m´ethodes cit´ees ci-dessus ont pour point commun de s’efforcer de cr´eer la re-pr´esentation virtuelle d’un r´eseau routier existant. Ce r´eseau routier peut ˆetre utilis´e comme donn´ee d’entr´ee pour un syst`eme de g´en´eration de zone urbaine. Cependant, certaines applica-tions requi`erent des donn´ees de plus haut niveau s´emantique, ou des mod`eles plus simples pour la navigation temps r´eel. C’est pourquoi il nous a paru interessant de privil`egier l’´etude des m´ethodes proc´edurales. Celles-ci ont ´egalement pour but d’ˆetre capables de cr´eer des r´eseaux routiers non existants.
1.2.3 M´ethode quasi-s´emantique
Nous reprenons ici la description r´ealis´ee par Julien Perret dans son manuscrit de th`ese [Per06] des travaux r´ealis´es au sein de son ´equipe de recherche par ses encadrants, St´ephane Donikian et Gw´enola Thomas.
L’application propos´ee par l’´equipe SIAMES4 [Tho99] en collaboration avec la soci´et´e IVT com-bine les contraintes de g´en´eration d’informations s´emantiques et de contrˆole de la complexit´e du mod`ele. En effet, l’objectif de cette application est la visualisation en temps r´eel de pi´etons en environnement urbain inform´e s´emantiquement (voies de circulation pi´etons/v´ehicules, sens, etc.). Une approche (quasi) s´emantique est justifi´ee dans ce cadre, puisque les humano¨ıdes, afin d’ˆetre autonomes, n´ecessitent des informations autres que celles concernant la g´eom´etrie. Ainsi, l’environnement de mod´elisation VUEMS5 [Don97, Tho99] est utilis´e pour traiter une base de donn´ees existante et permet l’introduction du r´eseau routier, de la signalisation, du mobilier urbain, des bˆatiments, des places et des espaces verts. L’environnement ainsi construit est utilis´e par une application simulant le d´eplacement de centaines de pi´etons autonomes et la navigation en temps r´eel. Dans cette phase de ses travaux, l’´equipe SIAMES ne s’int´eresse pas `
a la partie simulation du mod`ele mais plutˆot aux repr´esentations de l’environnement urbain. Ainsi, afin de repr´esenter la voirie, chaque rue est d´ecompos´ee en tron¸cons.
De plus, un corpus de 12 types de tron¸cons de r´eseau routier a ´et´e d´efini et est illustr´e par la Figure 1.2. Chaque tron¸con est lui-mˆeme compos´e de tron¸cons ´el´ementaires, ce qui permet de construire le graphe de connexit´e entre les diff´erents tron¸cons.
Pour compl´eter le graphe ainsi constitu´e, un tissu urbain compos´e de bˆatiments, d’espaces verts et d’autres zones de circulation est ajout´e, ainsi qu’un second graphe de passages qui est utilis´e pour la navigation des pi´etons virtuels [Don04].
1.2.4 G´en´eration
Nous allons `a pr´esent d´ecrire des m´ethodes de g´en´eration automatique de r´eseaux urbains. Si le but de ces m´ethodes peut occasionnellement ˆetre de recr´eer des r´eseaux urbains existants, leur int´erˆet principal r´eside dans leur capacit´e `a g´en´erer des r´eseaux urbains cr´edibles `a partir de donn´ees r´eelles ou imaginaires. Cette particularit´e rend ces approches tr`es utiles pour fournir des donn´ees d’entr´ee afin d’´evaluer les m´ethodes de g´en´eration de bˆatiments.
4
Synth`ese d’Images, Animation, Mod´elisation Et Simulation 5
Diff´erents travaux de recherche ont ´et´e men´es afin de proposer des solutions pour cette ´etape. Ces travaux font appel `a diff´erents m´ecanismes, notamment les L-System, la mod´elisation d´eclarative et les graphtales.
1.2.4.1 L-System
Parmi les travaux qui utilisent les L-System (voir Annexe C), CityEngine [PM01] propose des r´esultats particuli`erement int´eressants.
CityEngine est constitu´e d’une chaˆıne enti`ere d’outils couvrant les quatres premi`eres ´etapes pr´esent´ees dans cet ´etat de l’art. A savoir : la g´en´eration du r´eseau routier, les ´etapes de par-titionnement des blocs et parcelles, ainsi que la g´en´eration des ext´erieurs des bˆatiments. La contribution la plus remarquable de ces travaux au probl`eme de g´en´eration de zones urbaines est l’utilisation d’une extension des L-System pour la cr´eation d’un r´eseau routier.
Concevoir un syst`eme complexe de r`egles pour cr´eer un r´eseau routier conduit `a introduire un grand nombre de param`etres et de conditions qui doivent ˆetre int´egr´es dans la grammaire formelle sur laquelle le L-System est bas´e. L’introduction d’une nouvelle contrainte oblige `a r´e´ecrire de nombreuses r`egles, ce qui rend difficile l’extension du syst`eme. Au lieu de faire croˆıtre l’ensemble des r`egles de fa¸con exponentielle, les auteurs ont d´efini une extension des L-System qui cr´ee `a chaque ´etape de d´erivation des successeurs g´en´eriques appel´es successeurs id´eaux. Les param`etres de ces successeurs ne sont pas instanci´es. C’est l’appel `a une fonction objectif global qui instancie ces param`etres de fa¸con `a ce qu’elle soit satisfaite. Ensuite, le syst`eme v´erifie que ces param`etres satisfont les contraintes locales et les modifient si besoin.
Les fonctions d’objectifs globaux (dont les zones d’influence sont d´efinies par l’utilisation des cartes d´efinies en 1.1) ´evaluent la validit´e des param`etres des segments de route en cours de construction (cf. Figure 1.3) :
– densit´e de population : les zones les plus peupl´ees doivent ˆetre reli´ees par des routes, tandis que les rues doivent se d´evelopper dans les zones r´esidentielles et ˆetre reli´ees `a la route la plus proche ;
– sch´emas du r´eseau routier : cet objectif global assure la coh´erence de la ville avec les sch´emas choisis.
La fonction de contraintes locales ajuste les param`etres propos´es par la fonction d’objectif global afin de satisfaire les contraintes environnementales locales. Par exemple, un nouveau segment de route peut voir sa direction initialement d´efinie par la fonction d’objectif global (relier deux zones
A gauche : cartes d’hydrographie, d’´el´evation et de densit´e de population d’une ville virtuelle
tr`es peupl´ees) modifi´ee afin de tenir compte des caract´eristiques locales (pr´esence d’une falaise). Lorsque aucun ajustement n’est possible, le segment de r´eseau routier concern´e est effac´e grˆace `
a une r`egle de production du L-System. Cet effacement peut ˆetre la cons´equence de la rencontre d’un certain nombre de situations : r´eseau routier suffisamment fin dans la zone trait´ee, pr´esence d’une surface interdite au r´eseau routier (parc, plan d’eau, zone g´en´er´ee manuellement) ou rencontre avec un ´el´ement du relief incompatible avec les capacit´es de franchissement (longueur maximale d’un segment) du segment de r´eseau routier actif (cas d’une falaise ou d’une rivi`ere). Les L-System n’ont pas ´et´e cr´e´es pour repr´esenter des graphes cycliques (circuits), mais dans un r´eseau routier, les diff´erentes routes et rues sont g´en´eralement connexes et les impasses sont peu nombreuses. Il faut donc consid´erer le L-System non plus comme un arbre, mais plutˆot comme un r´eseau. Pour ce faire, la distance entre le segment cr´e´e et le r´eseau existant est test´ee et en dessous d’un seuil de proximit´e, l’extr´emit´e du segment est modifi´e de fa¸con `a rejoindre le r´eseau. Ces modifications permettent de regrouper les intersections entre les axes aux extr´emit´es des segments de rues, cr´eant naturellement des croisements entre plusieurs axes (plus de de deux axes).
1.2.4.2 Mod´elisation d´eclarative de segments de droite
Dans [Li`e96], Sylvain Li`ege applique au domaine de la conception urbaine l’approche de la mod´elisation d´eclarative (cf. Annexe D). Il met en ´evidence les notions d’´el´ements urbains qui peuvent ˆetre combin´es afin de composer des figures urbaines plus complexes. Le processus de description du r´eseau routier est men´e de fa¸con hi´erarchique et incr´ementale [LH97]. Le concep-teur d´ebute par une description grossi`ere, donnant uniquement les traits caract´eristiques tels que grands axes et croisements. Cette description est utilis´ee pour proposer une ou plusieurs solutions que le concepteur pourra affiner. Le processus de g´en´eration est bas´e sur un algorithme de propagation de contraintes et un mod`ele de sc`ene.
Le principal inconv´enient du processus de g´en´eration choisi est qu’il repose sur un espace faible-ment discr´etis´e, ce qui restreint la quantit´e de configurations possibles et donc de solutions.
1.2.4.3 G´en´eration de motifs pseudo-urbains
Le laboratoire ARIA6 de l’ ´Ecole d’Architecture de Lyon poss`ede une th´ematique de recherche qui s’articule selon deux directions : un g´en´erateur de graphtale qui, `a partir de simples r`egles
6
(a) (b) (c) (d)
Figure 1.4. Exemple de sch´emas urbains [Li`e96], de gauche `a droite : (a) concentrique, (b) radial, (c) ´echiquier, (d) diamant.
binaires bas´ees sur le formalisme des L-System, produit rapidement des g´eom´etries complexes (Figure 1.5) et un g´en´erateur de sch´emas multi-´echelle qui utilise le pr´ec´edent moteur bas´e sur les L-System et des r`egles de contraintes environnementales et topographiques (Figure 1.6). La combinaison de l’approche fractale avec un moteur de g´en´eration bas´e sur les L-System permet d’obtenir rapidement des r´esultats vari´es. Malheureusement, cette rapidit´e entraˆıne aussi des imperfections telles que des collisions de bˆatiments ou des r´eseaux routiers sans coh´erence.
1.2.5 Discussion
Les deux m´ethodes proc´edurales bas´ees sur les L-System (CityEngine et une partie des travaux du laboratoire ARIA) proposent des r´esultats `a l’´echelle d’une ville. Parmi les travaux de re-cherche existants dans ce domaine, CityEngine fait office de r´ef´erence. La diversit´e des ´etapes trait´ees, le degr´e de r´ealisme atteint ainsi que la capacit´e `a prendre en compte des donn´ees socio-statistiques existantes, ont ouvert la voie `a un grand nombre de travaux de recherche. CityEngine a ´et´e enrichi grˆace aux travaux de Peter Wonka [WWSR03] ce qui a conduit aux r´esultats d´ecrits en 1.5.2.2.
L’approche issue de la mod´elisation d´eclarative d´ecrit des sch´emas urbains non encore g´er´es au sein des approches proc´edurales (tel le sch´ema en diamant pr´esent´e `a droite de la Figure 1.4). Malheureusement, la m´ethode de g´en´eration qui a ´et´e utilis´ee dans [Li`e96] (solveur de contraintes num´eriques dans un espace discret) ne permet pas une r´esolution `a l’´echelle d’une ville. Pour garantir une plus grande diversit´e de l’ensemble des r´eseaux routiers pouvant ˆetre g´en´er´es, il serait bon d’int´egrer au formalisme des L-System les sch´emas urbains non encore disponibles mais pr´esents dans les ouvrages d’urbanisme tels que ceux auxquels se r´ef`ere S. Li´ege [Li`e96].
Figure 1.5. Diff´erentes ´etapes successives de g´en´eration de g´eom´etrie complexe `a base de graphtales [MBST01]
Figure 1.6. G´en´eration d’une zone urbaine `a partir d’un L-System et de r`egles de contraintes environnementales et topographiques [MBST01]
Une fois le r´eseau routier g´en´er´e, il est possible de r´ealiser une partition de la ville en blocs. Ce passage d’un probl`eme de grande taille `a plusieurs probl`emes similaires mais de plus petite taille est comparable au paradigme de conception algorithmique r´ecursif appel´e divide and conquer.
1.3
Blocs
Bloc Nous d´efinissons comme bloc une surface connexe entour´ee de routes. On peut aussi trouver le terme ˆılot urbain pour d´ecrire cette entit´e.
Le processus de g´en´eration associ´e `a cette ´etape est d’une complexit´e n´egligeable par rapport `a celle de l’´etape de g´en´eration du r´eseau routier. Elle est, de fait, souvent r´ealis´ee automatique-ment durant la g´en´eration du r´eseau routier. Il s’agit, le plus souvent, uniquement d’un calcul d’intersections sur les voies du r´eseau routier, comme dans la Figure 1.7. N´eanmoins, il peut ˆ
etre utile d’int´egrer `a ce traitement des raffinements suppl´ementaires : – fusion des zones trop petites ;
– prise en compte des donn´ees hydrographiques et des espaces verts ;
– sp´ecification des blocs : zones commerciales, de bureau, r´esidentielle, industrielle, scolaire, hospitali`ere, etc.
Le d´ecoupage de la ville en blocs permet une premi`ere ´etape de hi´erarchisation. Ceci diminue le nombre de contraintes `a g´erer, notamment dans le cas de la prise en compte de la contrainte de non-chevauchement. Le format utilis´e pour d´ecrire un bloc est le polygone, mais une restriction aux polygones convexes est g´en´eralement faite (comme dans [PM01] ou [Li`e96]), de fa¸con `a profiter de la moindre complexit´e des algorithmes de traitement g´eom´etrique pour ce type de polygones. Des informations suppl´ementaires peuvent ˆetre associ´ees `a ces polygones, comme par exemple le nombre de personnes habitant ou travaillant au sein de ces blocs, ou encore leur type (r´esidentiel, bureau, immeuble, centre commercial, etc.).
Si la g´en´eration des blocs `a partir des r´eseaux routiers est d’une faible complexit´e, elle reste n´ecessaire pour diminuer la complexit´e g´en´erale de la g´en´eration de villes. L’´etape suivante profite de ce niveau de d´etail logique pour restreindre les calculs et les contraintes au bloc en cours.
Apr`es l’´etape de d´ecoupage du r´eseau routier en bloc, la g´en´eration des parcelles `a partir des blocs constitue une nouvelle ´etape dans le processus de hierarchisation de la sc`ene.
Figure 1.7. De gauche `a droite : routes, blocs et parcelles [PM01]
1.4
Parcelles
Parcelle Surface poss´edant une mˆeme adresse postale, les parcelles sont les zones sur lesquelles seront plac´es les bˆatiments (le contour d’un bˆatiment est inclus dans une unique parcelle, mais une parcelle peut accueillir plusieurs bˆatiments).
1.4.1 Pr´esentation
Les similitudes entre les ´etapes de g´en´eration route → blocs et blocs → parcelles sont tr`es fortes : le format utilis´e est g´en´eralement le polygone, le plus souvent convexe (comme dans [PM01] ou [Li`e96]). Il est possible de g´en´erer s´epar´ement la parcellisation de chaque bloc, puis de relancer la g´en´eration uniquement pour les blocs dont les parcelles ne correspondent pas aux attentes de l’utilisateur.
1.4.2 G´en´eration
Comme pour les r´eseaux routiers, la d´efinition des parcelles au sein d’un bloc est g´en´eralement effectu´ee selon un sch´ema pr´ed´efini. Cette similitude de description ne s’´etend pas aux m´ethodes de g´en´eration : les dimensions restreintes des blocs ne n´ecessitent pas l’utilisation de L-System. Les m´ethodes utilis´ees sont plutˆot bas´ees sur un partitionnement purement g´eom´etrique ou l’instanciation d’un sch´ema.
1.4.2.1 Parcellisation g´eom´etrique
Algorithme dichotomique Dans [PM01], les blocs sont d´ecoup´es en parcelles par un pro-cessus r´ecursif qui coupe la plus grande parcelle au milieu de son plus grand cˆot´e. Le processus s’arrˆete quand la surface de la plus grande parcelle est inf´erieure `a un seuil pr´ed´efini. Ensuite
un post-filtrage est effectu´e sur les parcelles de fa¸con `a ´eliminer les parcelles trop petites ainsi que celles qui n’ont pas acc`es `a une route. Cette m´ethode de raffinement successif limite la parcellisation au sch´ema en damier. Cette m´ethode souffre ´egalement de plusieurs d´efauts : – sensibilit´e aux param`etres (seuil) ;
– traitement restreint aux blocs d´ecrits par un seul polygone convexe ; – g´en´eration de parcelles d´efinies par un seul polygone convexe ;
Diagramme de Vorono¨ı Dans [Per06], Julien Perret fait appel au diagramme de Vorono¨ı (dont on peut trouver les d´etails d’une mise en œuvre informatique dans [Gho90]) et `a l’algorithme du squelette droit [FO98], afin d’automatiser le processus de parcellisation des blocs. L’utilisation de cet algorithme lui permet de proposer une m´ethode applicable aux polygones simples, et non plus uniquement aux polygones convexes.
Dans le contexte urbain, cette m´ethode propose l’utilisation de crit`eres simples, tels que la surface, la largeur et la profondeur. Ainsi, pour un ˆılot donn´e, plusieurs variables sont position-nables :
– la surface moyenne, minimale et maximale de chaque parcelle, – la largeur moyenne, minimale et maximale de chaque parcelle, – la profondeur moyenne, minimale et maximale de chaque parcelle.
La Figure 1.8 pr´esente diff´erents ensembles de parcelles g´en´er´es `a partir d’un bloc. On peut d´eceler dans la derni`ere image des artefacts de g´en´eration (parcelles tr`es peu larges ou triangu-laire avec un angle tr`es ferm´e).
1.4.2.2 Parcellisation selon un sch´ema
Dans [Li`e96], l’environnement de d´epart est une surface plane discr´etis´ee, repr´esentant le bloc. Un point de la grille est choisi de fa¸con arbitraire, puis un autre point est recherch´e de fa¸con `
a cr´eer un segment compatible avec le sch´ema `a utiliser. La recherche guid´ee de l’extr´emit´e du segment permet de r´eduire efficacement l’espace de recherche. La m´ethode de parcellisation est utilis´ee pour l’ensemble de l’ossature du sch´ema. Pour les segments qui s´eparent les parcelles entre elles, une autre discr´etisation est effectu´ee. Celle-ci porte sur les segments constituant le squelette int´erieur du sch´ema. Les points ainsi d´efinis sont nomm´ees points d’ancrage. Chaque point d’ancrage est ensuite appari´e `a un ou plusieurs points de l’enveloppe ext´erieure de fa¸con `

![Figure 1.2. Diff´ erents types de tron¸ cons d’un r´ eseau routier dans VUEMS [Don04]](https://thumb-eu.123doks.com/thumbv2/123doknet/2099951.7676/38.892.115.807.374.851/figure-diff-erents-types-tron-eseau-routier-vuems.webp)
![Figure 1.3. Un r´ eseau routier g´ en´ er´ e ` a partir de donn´ ees en entr´ ee [PM01]](https://thumb-eu.123doks.com/thumbv2/123doknet/2099951.7676/40.892.127.810.357.835/figure-un-eseau-routier-partir-donn-ees-entr.webp)
![Figure 1.5. Diff´ erentes ´ etapes successives de g´ en´ eration de g´ eom´ etrie complexe ` a base de graphtales [MBST01]](https://thumb-eu.123doks.com/thumbv2/123doknet/2099951.7676/43.892.86.768.223.950/figure-diff-erentes-etapes-successives-eration-complexe-graphtales.webp)
![Figure 1.6. G´ en´ eration d’une zone urbaine ` a partir d’un L-System et de r` egles de contraintes environnementales et topographiques [MBST01]](https://thumb-eu.123doks.com/thumbv2/123doknet/2099951.7676/44.892.128.809.352.817/figure-eration-urbaine-partir-system-contraintes-environnementales-topographiques.webp)
![Figure 1.9. Exemple d’espace de solution r´ eduit ` a cause de la discretisation de l’espace [Li` e96]](https://thumb-eu.123doks.com/thumbv2/123doknet/2099951.7676/49.892.228.630.253.412/figure-exemple-espace-solution-eduit-cause-discretisation-espace.webp)
![Figure 1.10. Exemple de r´ ealisations du projet LaHave [RMS96]](https://thumb-eu.123doks.com/thumbv2/123doknet/2099951.7676/51.892.115.727.679.878/figure-exemple-r-ealisations-du-projet-lahave-rms.webp)
![Figure 1.14. Reconstruction d’un bˆ atiment existant (` a gauche) ` a Rennes. Le mod` ele virtuel, utilisant les FL-system est montr´ e ` a droite[Per06]](https://thumb-eu.123doks.com/thumbv2/123doknet/2099951.7676/55.892.152.761.157.528/figure-reconstruction-atiment-existant-rennes-virtuel-utilisant-system.webp)