T
T
H
H
È
È
S
S
E
E
En vue de l'obtention du
D
D
O
O
C
C
T
T
O
O
R
R
A
A
T
T
D
D
E
E
L
L
’
’
U
U
N
N
I
I
V
V
E
E
R
R
S
S
I
I
T
T
É
É
D
D
E
E
T
T
O
O
U
U
L
L
O
O
U
U
S
S
E
E
Délivré par l'Université Toulouse III - Paul Sabatier
Discipline ou spécialité : Traitement de données de télédétection
JURY
Nick Hall (Président)
Jacqueline Boutin (Rapporteur) Pierre-Yves Le Traon (Rapporteur) Jordi Font (Examinateur) Manuel Samuelides (Examinateur) Sylvie Thiria (Directrice de thèse) Estelle Obligis (Co-directrice de thèse)
Ecole doctorale :
Sciences de l'Univers, de l'Environnement et de l'Espace Unité de recherche : CLS - Département d'Océanographie Spatiale
Directrice de Thèse : Sylvie Thiria
Rapporteurs : Jacqueline Boutin, Pierre-Yves Le Traon Présentée et soutenue par
Adel AMMAR Le 23 Octobre 2008
Titre :
Restitution de la salinité de surface de l'océan à partir des mesures SMOS :
Remerciements
Je remercie en premier lieu celui à qui tout le remerciement revient. Ensuite ma mère et mon père qui m'ont donné sans compter depuis tant d'années, et qui méritent plus que moi le titre que j'ai obtenu.
Je suis reconnaissant à Sylvie Thiria qui m'a permis d'apprendre tant de choses depuis quatre ans ; à Estelle Obligis pour son encadrement efficace et ses encouragements ; à Sylvie Labroue pour son aide active et ses idées précieuses ; à CLS qui m'a permis d'effectuer cette thèse dans des conditions agréables.
Merci à Michel Crépon, à Carlos Mejia et à Nicolas Reul pour leur collaboration utile.
Merci à Jacqueline Boutin et à Pierre-Yves Le Traon pour le temps qu'ils ont consacré à cette thèse, et pour leurs rapports constructifs et encourageants. Merci aux autres membres du jury pour leur disponibilité et leurs commentaires bienveillants.
Merci enfin et surtout pardon à Amel, Ahmad, Zaynab et Maryam pour le manque de temps et d'attention que ce travail ne m'a pas permis de leur accorder.
Table des matières
Table des figures... 6
Liste des tableaux ... 14
Introduction ... 15
Chapitre I ... 17
Contexte de l’inversion des mesures SMOS ... 17
I.1 Intérêt de la mesure de la salinité :... 17
I.2 Présentation de la mission SMOS :... 18
I.3 Relation physique entre salinité et températures de brillance... 22
I.3.1 Températures de brillance et émissivité... 22
I.3.2 Modèles directs d’émissivité... 23
I.3.3 Dépendance entre les TBs et les autres paramètres ... 25
I.4. Simulation des observations : ... 29
I.4.1 Simulation des mesures géophysiques par le modèle Mercator (Base B0) ... 29
I.4.2 Simulation des TBs par un modèle direct : ... 35
Chapitre II ... 38
Méthodes d’inversion... 38
II.1 Méthode itérative :... 39
II.1.1 Avantages de la méthode itérative :... 40
II.1.2 Inconvénients de la méthode itérative : ... 41
II.2 Méthodes empiriques :... 42
II.2.1 Avantages des méthodes empiriques :... 43
II.2.2 Inconvénients des méthodes empiriques : ... 43
II.2.3 Méthode neuronale : ... 43
II.3 Etude d’un cas simplifié : ... 46
II.3.1 Constitution de la base d’apprentissage : ... 46
II.3.2 Bruitage des entrées :... 47
II.3.3. Evaluation des résultats de restitution : ... 47
II.3.4 Importance des paramètres auxiliaires SST et W :... 51
II.3.5 Discussion :... 54
Chapitre III ... 55
Inversion des mesures SMOS par réseaux de neurones : obstacles et solutions ... 55
III. 1 Passage du repère de l’antenne au repère de la surface : ... 55
III.1.1 Calcul du premier paramètre de Stokes : ... 57
III.1.2 Résultats de restitution avec des TBs H+V en entrée ... 58
III.2 Effet du bruit de mesure ... 60
III.2.1 Origine du bruit sur les différents paramètres ... 60
III.2.3 Effet du bruit radiométrique ... 63
III.2.4 Effet d’un biais sur les TBs : ... 71
III.2.5 Effet du bruit sur les paramètres géophysiques :... 73
III.2.5 Effet d’un biais sur SST et W : ... 74
III.2.6 Conclusion... 76
III.3 Problème de la variation des angles d’incidence ... 77
III.3.1 Variabilité de la gamme d’angles d’incidence : ... 77
III.3.3 Adaptation des observations aux entrées : régression non paramétrique... 86
III.3.4 Résultats d'interpolation sur une demi-orbite :... 93
III.3.5 Utilisation des pixels voisins... 99
III.3.6 Conclusion :... 103
Chapitre IV ... 104
Choix de la base d’apprentissage et résultats d’inversion... 104
IV.1 Base d’apprentissage géographiquement régulière (BA1) ... 105
IV.1.1 Résultats d’apprentissage :... 106
IV.1.2 Résultats de restitution sur une demi-orbite :... 116
IV.1.3 Résultats sur la base globale B0... 122
IV.2 Base d’apprentissage géophysiquement équi-répartie (BA2)... 128
IV.2.1 Résultats d’apprentissage ... 131
IV.2.2 Résultats sur la base globale B0... 135
IV.2.3 Effet de la taille de la base d’apprentissage ... 136
IV.3 Prolongation de l’apprentissage (base BA3) ... 140
IV.3.1 Résultats sur la base globale B0... 142
IV.4 Etude de la bande de latitudes sud ... 144
IV.4.1 Base d’apprentissage mixte (BAm) : ... 147
IV.4.2 Combinaison des sorties de deux réseaux... 148
IV.5 Discussion ... 149
Chapitre V... 152
Perspectives : traitement en phase de vol... 152
V.1 Adaptation de la classification aux données réelles ... 152
V.2 Bases d’apprentissage... 152
V.3 Inversion des TBs au niveau de l’antenne... 154
V.4 Inversion d’un modèle direct neuronal... 155
Conclusion... 156
Bibliographie... 158
Variables, Abréviations et Acronymes ... 165
Table des figures
Figure 1 : Nombre de mesures in situ annuelles dans des boîtes de 1°x1° (World Ocean Atlas
2005, [Antonov et al., 2006]). ... 18
Figure 2 : Vue d’artiste de SMOS (d’après www.smos-bec.icm.csic.es). ... 21
Figure 3 : À gauche, illustration du déplacement sur le sol du FOV de SMOS (X est une cible à la surface de l'océan). A droite, illustration du déplacement de la cible dans le FOV, dû au déplacement de SMOS (d’après [Dinnat, 2003]). ... 21
Figure 4 : Nombre de mesures SMOS sur l'océan, dans des boîtes GODAE (200kmx200kmx10jours). D'après [Boutin et al., 2004]... 22
Figure 5 : TBH (gauche) et TB (droite), à 30° d’incidence, simulées par le modèle direct V (SSA), en fonction de la SSS, à SST et W fixes (15°C et 7 m/s)... 26
Figure 6 : TBH (gauche) et TB (droite), à 30° d’incidence, simulées par le modèle direct V (SSA), en fonction de la SST, à SSS et W fixes (35.6 psu et 7 m/s). ... 26
Figure 7 : TBH (gauche) et TB (droite), à 30° d’incidence, simulées par le modèle direct V (SSA), en fonction de la vitesse du vent, à SSS et SST fixes (35.6 psu et 15°C). ... 27
Figure 8 : TBH (gauche) et TB (droite), simulées par le modèle direct (SSA), en fonction de V l’angle d’incidence, à SSS, SST et vent fixes (35.6 psu, 15°C et 7 m/s). En changeant la valeur de ces trois paramètres, l’allure de la fonction reste semblable. ... 27
Figure 9 : Sensibilité de la TB au nadir (en K/psu) à la SST (°C) et au vent (m/s) : SSS TB ∂ ° ∂ (0 ) . ... 28
Figure 10 : Sensibilité de la TB (à 40° d’incidence) à la SST (°C) et au vent (m/s) : SSS TB ∂ ° ∂ (40 ) . A gauche : TBH. A droite : TBV. ... 28
Figure 11 : A gauche : SSS en fonction de TB (H+V à 5° d’incidence) à SST et W fixes (15°C±1°C et 7m/s±1m/s). A droite : SSS en fonction de TB (H+V à 5° d’incidence) pour des valeurs de SST et W variables. Les données proviennent d’une base océanique représentative (2% de tirage aléatoire de la base B0 décrite dans I.4.1), et ne sont pas bruitées. Le code de couleur indique la densité relative des points. ... 29
Figure 12 : SSS moyenne, en psu, (boîtes de 1°x1°) dans la base B0. L’échelle est entre 32 et 38 psu. ... 31
Figure 13 : SST moyenne, en °C, (boîtes de 1°x1°) dans la base B0. L’échelle est entre 5 et 30°C... 31
Figure 14 : W moyen, en m/s, (boîtes de 1°x1°) dans la base B0. L’échelle est entre 1 et 15 m/s. ... 31
Figure 15 : Ecart-type annuel de la SSS, en psu, (boîtes de 1°x1°) dans la base B0... 32
Figure 16 : Ecart-type annuel de la SST, en °C, (boîtes de 1°x1°) dans la base B0... 32
Figure 17 : Ecart-type annuel de W, en m/s, (boîtes de 1°x1°) dans la base B0. ... 32
Figure 18 : Répartition de la SSS (en psu) dans la base B ... 33 0 Figure 19 : Répartition de la SST (en °C) dans la base B ... 33 0 Figure 20 : Répartition du module du vent (en m/s) dans la base B . ... 34 0 Figure 21 : Répartition des couples (SSS, SST) dans la base globale. Le code de couleur indique la densité relative des points... 34
Figure 22 : Exemple d’irrégularité à petite échelle des TBs simulées avec le programme SSA01 d’origine (ici TBV, en bleu), lissée par l’approximation neuronale (en rouge)... 36 Figure 23 : Diagramme de dispersion entre les TBs (à gauche : TBh, et à droite : TBv)
obtenues par l’approximation neuronale et les TBs du modèle SSA d’origine
(communication personnelle de Carlos Mejia). ... 37 Figure 24 : Principe de restitution de la salinité à partir de données simulées. ... 38 Figure 25 : Ecart-type de l’erreur de restitution (en psu), donnée par la méthode itérative, en
fonction de la distance à la trace subsatellite (en km) et de la SST (°C). TBs, SST et W sont bruités avec un bruit réaliste. (D’après [Boutin et al., 2004]). ... 41 Figure 26 : Comparaison des modèles SSA (en rouge) et double-échelle (en bleu) aux données observées pendant la campagne aéroportée CoSMOS. En abscisse : angle d'incidence. En ordonnée : température de brillance induite par le vent (pour une vitesse de vent
comprise entre 4 et 8 m/s), pour la polarisation H (en haut), et V (en bas). Figures d'après [Reul, 2008]... 42 Figure 27 : Exemple de réseau de neurones restituant la salinité... 45 Figure 28 : Répartition géographique des pixels de la base d’apprentissage BA1, et valeurs de
la salinité associées (en psu)... 47 Figure 29 : Diagramme de dispersion entre la salinité de référence (en abscisse) et la salinité
restituée par un réseau avec 51 TBs, SST et W en entrée. Le code de couleur indique la densité relative des points. ... 48 Figure 30 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°), en psu, sur la base B , pour un réseau avec 51 TBs, SST et W en entrée. ... 49 0
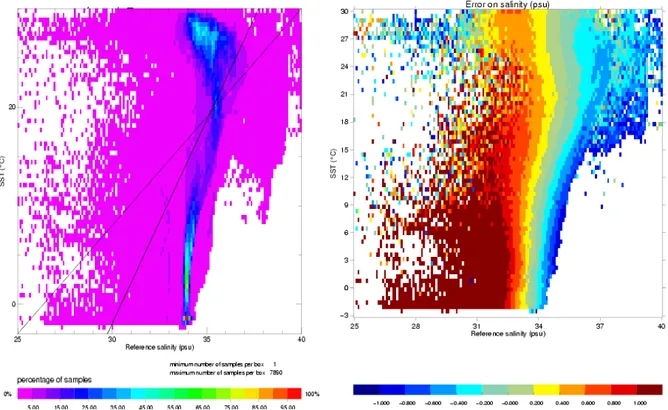
Figure 31 : Densité de pixels dans la base B (gauche) et erreur de restitution du réseau 0
d'inversion (droite, échelle entre -1 psu et 1 psu) en fonction des couples (SSS, SST). La densité de pixels dans la base d'apprentissage est la même que dans la base B . ... 50 0 Figure 32 : Densité de pixels dans la base B (gauche) et erreur de restitution du réseau 0
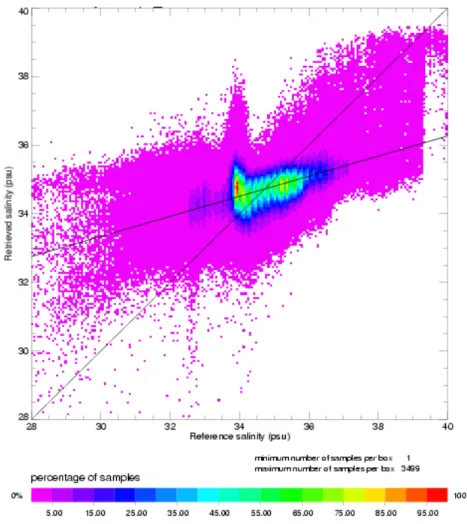
d'inversion (droite, échelle entre -1 psu et 1 psu) en fonction des couples (SSS, W)... 50 Figure 33 : Diagramme de dispersion entre la salinité de référence (en abscisse) et la salinité
restituée par un réseau avec 51 TBs en entrée (sans SST ni W). Le code de couleur indique la densité des points... 51 Figure 34 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°) sur la
base B , pour un réseau dont les seules entrées sont une série de 51 TBs entre 0° et 50° 0 (sans les paramètres auxiliaires SST et W). ... 52 Figure 35 : Diagramme de dispersion entre la salinité de référence (en abscisse) et la salinité
restituée par un réseau avec 51 TBs et SST en entrée (sans W). ... 52 Figure 36 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°) sur la
base B , pour un réseau avec pour entrées une série de 51 TBs entre 0° et 50° et la SST 0
(sans W)... 53 Figure 37 : Schéma d’inclinaison du plan d’antenne de SMOS par rapport au plan horizontal
local. (D’après [Waldteufel et al., 2003])... 55 Figure 38 : Sensibilité de la température de brillance à la salinité en fonction de la température,
en polarisations verticale (a) et horizontale (b), à différents angles d’incidence (d’après [Dinnat, 2003]). ... 57 Figure 39 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°), en psu,
sur la base B , pour un réseau avec 26 TBs en H+V (2.45 K de bruit), SST et W en 0
entrée. ... 59 Figure 40 : Bruit radiométrique estimé (en K) dans un champ de vue de SMOS... 61
Figure 41 : Histogramme des TBs (nadir) dans une même base globale, avant (gauche) et après addition d'un bruit réaliste de 1.9 K d'écart-type (droite). ... 62 Figure 42 : Diagramme de dispersion entre la TB H à 10° et la TB au nadir avant (gauche) et
après addition d’un bruit réaliste (droite). Le code de couleur indique la densité relative des points... 62 Figure 43 : Modification de la pente de la régression linéaire entre SSS et TB (H+V, à 5°
d’incidence), par l’effet de l’addition d’un bruit de 1K sur les TBs. SST=15°C ± 1°C et W=7m/s ± 1m/s. ... 63 Figure 44 : Relation entre la SSS et le TB au nadir bruité (ronds bleus) et non bruité (points
rouges). Pour chaque intervalle de TB de 0.1 K, on a fait une moyenne des TBs se trouvant dans cet intervalle, et une moyenne des SSS correspondantes. SST et W sont variables et proviennent d’une base océanique représentative... 66 Figure 45 : Erreur de restitution moyenne sur une base globale, après apprentissage avec un
bruit sur les TBs de 2K (23 TBs H+V en entrée entre 5° et 50°)... 67 Figure 46 : Erreur de restitution moyenne sur une base globale, après apprentissage avec un
bruit sur les TBs réduit à 0.2K (23 TBs H+V en entrée entre 5° et 50°). ... 67 Figure 47 : Evolution de l’erreur RMS (en vert), du biais sur les SSS>35psu (en bleu) et du du biais sur les SSS<33psu, en fonction du bruit sur la TB. Cas d’un réseau d’inversion avec 23 TBs en entrée (H+V de 5° à 49° d’incidence), SST et W bruités (1°C et 2m/s)... 68 Figure 48 : Evolution de la pente de la droite de régression entre SSS restituée par le réseau et
SSS de référence, en fonction du bruit sur la TB. Cas d’un réseau d’inversion avec 23 TBs en entrée (H+V de 5° à 49° d’incidence), SST et W bruités (1°C et 2m/s). ... 69 Figure 49 : Evolution de l’erreur RMS (en vert), du biais sur les SSS>35psu (en bleu) et du du
biais sur les SSS<33psu, en fonction du bruit sur la TB (en K). Cas d’un réseau
d’inversion avec une seule TB en entrée (H+V à 45° d’incidence), SST et W bruités (1°C et 2m/s)... 70 Figure 50 : Evolution de la pente de la droite de régression entre SSS restituée par le réseau et
SSS de référence, en fonction du bruit sur la TB (en K). Cas d’un réseau d’inversion avec une seule TB en entrée (H+V à 45° d’incidence), SST et W bruités (1°C et 2m/s).71 Figure 51 : Erreur de restitution moyenne, en psu, (boîtes de 1°x1°) sur une base globale,
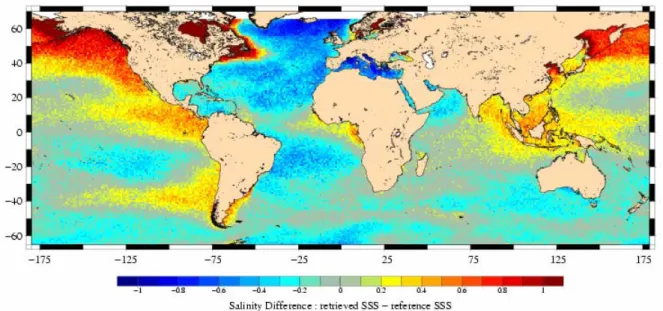
après apprentissage avec un bruit sur les TBs de 2K sans biais, puis une application sur une base globale dont les TBs ont été biaisées de 0.2 K (23 TBs H+V en entrée entre 5° et 50°). ... 72 Figure 52 : Différence (en psu) entre la cartographie d’erreur de la Figure 51 (biais de 0.2 K
sur les TBs, à l’application du réseau) et celle de la Figure 45 (sans biais). L’échelle est entre -0.2 psu et 0.2 psu... 73 Figure 53 : Erreur de restitution moyenne d’un réseau qui a appris sans bruit sur les TBs mais
avec un bruit sur SST (1°C) et W (2m/s). L’échelle est entre 0.1psu et -0.1psu, et
l’échantillonnage de 1°x1°. ... 74 Figure 54 : Différence (en psu) entre la cartographie d’erreur obtenue avec un biais de 1°C sur la SSS, à l’application du réseau, et celle obtenue sans biais. L’échelle est entre -0.2 psu et 0.2 psu, et l’échantillonnage est de 1°x1°. ... 75 Figure 55 : Différence (en psu) entre la cartographie d’erreur obtenue avec un biais de 1 m/s
sur W, à l’application du réseau, et celle obtenue sans biais. L’échelle est entre -0.2 psu et 0.2 psu, et l’échantillonnage est de 1°x1°. ... 75 Figure 56 : Angles d'incidence (en degré) disponibles dans le champ de vue de SMOS. Les
pixels situés sur une ligne parallèle à la trace subsatellite (dwell line) sont observés avec la même gamme d'incidences... 78 Figure 57 : Nombre d’angles d’incidence n(p) (correspondant à des TBs H ou V) dans le
Figure 58 : Position des points du champ de vue sur la grille ISEA, pour le snapshot n°10. .. 79
Figure 59 : Taille moyenne du pixel SMOS, en km... 80
Figure 60 : Angle d’incidence minimal pour chaque pixel du domaine D0. ... 82
Figure 61 : Angle d’incidence maximal pour chaque pixel du domaine D0... 83
Figure 62 : Partition de D1 en 10 classes... 84
Figure 63 : cartographie de l’erreur de salinité, sur une base régionale, pour un réseau où les TBs ont été décalés de 1°. ... 85
Figure 64 : Exemple d’application de la régression localement linéaire. ... 88
Figure 65 : Fonction noyau utilisée (fonction d’Epanechnikov)... 88
Figure 66 : Densité des angles d’incidence pour la classe 1. ... 90
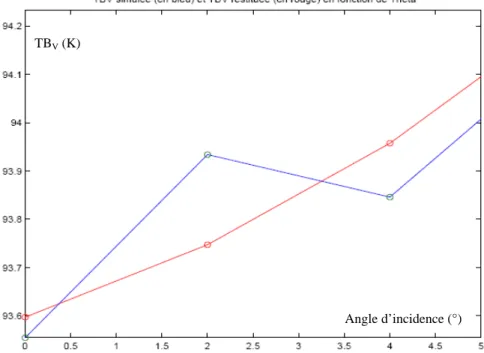
Figure 67 : TBH (en vert), TBV (en rouge), et leur somme (en bleu) en fonction de l’angle d’incidence ... 91
Figure 68 : Dérivée seconde de TBH (traits interrompus), TBV (trait fin) et TBH+V (trait gras) en fonction de l’angle d’incidence, en K/deg². ... 92
Figure 69 : De haut en bas : biais, écart-type, et valeur de la largeur de fenêtre de la régression localement linéaire appliquée à TBH+V, pour la classe 1, en prenant ( ) 2 1 ) (θ0 hopt θ0 h = . 95 Figure 70 : Comparaison entre l'écart-type du bruit original ajouté aux TBs simulés d'une part (angles positifs seulement), et l'écart-type de l'erreur entre TBs interpolés et TBs simulés aux mêmes noeuds d'autre part (classe n°1,en prenant ( ) 2 1 ) (θ0 hopt θ0 h = ) ... 96
Figure 71 : Valeurs de la matrice de corrélation entre les bruits résiduels (après lissage) sur les TBs, pour la classe n°1, en prenant ( ) 2 1 ) (θ0 hopt θ0 h = ... 96
Figure 72 : Valeurs de corrélation entre les bruits résiduels (après lissage) sur les TBs correspondants à des nœuds d’interpolation voisins, pour la classe n°1, en prenant ) ( 2 1 ) (θ0 hopt θ0 h = . En abscisse : angle d’interpolation i. En ordonnée : coefficient de corrélation entre les bruits résiduels correspondant aux angles d’interpolation i et i+1 (astérisques), i et i+2 (ronds), i et i+3 (carrés) ou i et i+4 (v). ... 97
Figure 73 : De haut en bas : biais, écart-type, et valeur de la largeur de fenêtre de la régression localement linéaire appliquée à TBH+V, pour la classe 1, en prenant h (θ0)=2.hopt(θ0). 98 Figure 74 : Valeurs de la matrice de corrélation entre les bruits résiduels (après lissage) sur les TBs, pour la classe n°1,en prenant h (θ0)=2.hopt(θ0). ... 98
Figure 75 : Biais (en rouge) et écart-type (en bleu) moyens des TBs interpolés, pour la classe n°1, en fonction de la largeur de fenêtre moyenne... 99
Figure 76 : Exemple de pixels voisins sur une grille ISEA dans un voisinage de 30km... 100
Figure 77 : Ecart-type de la TB (1er paramètre de Stokes, pour un angle d’incidence de 49°) sur un voisinage de 30km de chaque pixel de la classe 1. La variabilité des TBs pour des incidences plus faible est encore plus réduite. ... 101
Figure 78 : Comparaison entre le bruit original, le bruit résiduel obtenu en utilisant les TBs d’un seul pixel à la fois, et le bruit résiduel obtenu en utilisant les TBs des pixels voisins (classe 1)... 102
Figure 79 : Comparaison entre le bruit original, le bruit résiduel obtenu en utilisant les TBs d’un seul pixel à la fois, et le bruit résiduel obtenu en utilisant les TBs des pixels voisins (classe 8)... 102
Figure 80 : Etapes successives de la restitution de la salinité à partir des TBs SMOS. En gras : phase d’apprentissage à effectuer une fois pour toutes. ... 104
Figure 81 : Répartition des pixels et valeur de la salinité (en psu) dans la base
d’apprentissageBA1... 105
Figure 82 : Constitution d’une base d’apprentissage de données simulées. ... 106
Figure 83 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°) donnée par le réseau de la classe 1, sur la base d’apprentissage BA1. ... 108
Figure 84 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 4°x4°) donnée par le réseau de la classe 1, sur la base d’apprentissage BA1. ... 108
Figure 85 : Cartographie de l’écart à la SSS moyenne (en psu). Pour tout triplet (SSS0, SST0, W0) de la base BA1, on calcule l’écart à la moyenne
∑
± == ±° − = s m W W C SST SST i i i SSS n SSS W SST SSS e / 1 1 0 0 0 0 0 0 0 1 ) , , ( ; où n est le nombre de triplets qui ont la 0 même situation de SST (à 1°C près) et de W (à 1 m/s près). La cartographie représente la valeur moyenne de e dans des boîtes de 4°x4°. ... 109Figure 86 : Diagramme de dispersion entre la salinité de référence et la salinité restituée par le réseau de la classe 1, sur la base d’apprentissage BA1. Le code de couleur indique la densité des points. ... 110
Figure 87 : En haut : moyenne (ronds) et écart-type (demi-largeur des traits verticaux) de l’erreur de restitution sur la base d’apprentissage (pour le réseau de la classe 1), par intervalle de SSS de 0.25 psu. En bas : histogramme de la SSS (psu) dans la base d’apprentissage, avec un pas de 0.25 psu... 112
Figure 88 : En haut : moyenne (ronds) et écart-type (demi-largeur des traits verticaux) de l’erreur de restitution sur la base d’apprentissage (pour le réseau de la classe 1), par intervalle de SST de 1°C. En bas : histogramme de la SST (°C) dans la base d’apprentissage, avec un pas de 1°C. ... 113
Figure 89 : En haut : moyenne (ronds) et écart-type (demi-largeur des traits verticaux) de l’erreur de restitution sur la base d’apprentissage (pour le réseau de la classe 1), par intervalle de W de 1 m/s. En bas : histogramme de W (m/s) dans la base d’apprentissage, avec un pas de 1 m/s... 114
Figure 90 : Moyenne (ronds) et écart-type (demi-largeur des traits verticaux) de l’erreur de restitution sur la base d’apprentissage (pour le réseau de la classe 8), (a) par intervalle de SSS de 0.25 psu (b) par intervalle de SST de 1°C (c) par intervalle de W de 1 m/s... 115
Figure 91 : Contribution relative des entrées des 10 réseaux d’inversion (ensemble des TBs (étoiles), SST (ronds) et W (carrés)) à la restitution de la SSS. ... 116
Figure 92 : SST (en °C) dans le domaine D1... 117
Figure 93 : W (en m/s) dans le domaine D1. ... 118
Figure 94 : Histogramme de SSS (en psu) dans la demi-orbite. ... 118
Figure 95 : Histogramme de SST (en °C) dans la demi-orbite. ... 119
Figure 96 : Histogramme de la vitesse du vent (en m/s) dans la demi-orbite. ... 119
Figure 97 : SSS de référence (à gauche) et SSS restituée par les réseaux d’inversion (à droite), en psu, dans le domaine D1. ... 121
Figure 98 : Cartographie de l’erreur de restitution (en psu) au niveau des pixels (échantillonnage de 0.15°) du domaine D1 après apprentissage sur la base BA1... 121
Figure 99 : Diagramme de dispersion entre SSS restituée (en psu, en ordonnée) et SSS de référence (en psu, en abscisse), dans le domaine D1. ... 122
Figure 100 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°) donnée par le réseau de la classe 1 (25 entrées, incidences entre 5° et 50°), sur la base B , 0 après apprentissage avec la base BA1. Les bruits sur les TBs sont autour de 1 K (Tableau 5) et sont corrélés. ... 124
Figure 101 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°)
donnée par le réseau de la classe 1 (25 entrées, incidences entre 5° et 50°), sur la base B , 0 après apprentissage avec la base BA1. Les bruits sur les TBs sont autour de 1 K (Tableau
5) et sont indépendants... 125
Figure 103 : Cartographies des erreurs de restitution par saison, pour la classe 1, dans des boîtes de 1°x1° (chaque boîte contient 4 pixels), après apprentissage avec la base BA1. ... 126
Figure 104 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°) donnée par le réseau de la classe 8 (5 entrées, incidences entre 40° et 45°), sur la base B , 0 après apprentissage avec la base BA1. Les bruits sur les TBs sont entre 1 K et 1.9 K (Tableau 5) et sont corrélés. ... 127
Figure 105 : Diagramme de dispersion entre la salinité de référence et la salinité restituée par le réseau n°8 (5 entrées, incidences entre 40° et 44°), sur la base B0... 127
Figure 106 : Distribution géographique des pixels de la base d’apprentissage BA2 (nombre de pixels par boîte de 2°x2°). ... 129
Figure 107 : Répartition de la SSS (en psu) dans la base BA2... 129
Figure 108 : Répartition de la SST (en °C) dans la base BA2... 130
Figure 109 : Répartition de W (en m/s) dans la base BA2. ... 130
Figure 110 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°) donnée par le réseau de la classe 1, sur la base d’apprentissage BA2... 132
Figure 111 : Cartographie de l’écart à la SSS moyenne (en psu). Pour tout triplet (SSS0, SST0, W0) de la base BA2, on calcule l’écart
∑
± == ±° − = s m W W C SST SST i i i SSS n SSS e / 1 1 0 0 0 0 1 ; où n est le nombre de 0 triplets qui ont la même situation de SST (à 1°C près) et de W (à 1 m/s près). La cartographie représente la valeur moyenne de e dans des boîtes de 1°x1°. ... 132Figure 112 : Schéma d’estimation du biais moyen entre SSS de référence et SSS restituée, pour SSS0=SSSmoyenne + e. ... 133
Figure 113 : Valeur absolue de la sensibilité moyenne de TBnadir à la SSS (en K/psu) dans des boîtes de 1°x1°, sur la base BA2... 133
Figure 114 : Ecart-type de la SSS (en psu) par situation de SST et W. Pour chaque triplet (SSS0, SST0, W0) de la base BA2, on calcule l’écart-type de SSS sur l’ensemble des triplets {( SSSi, SSTi, Wi) ; tels que SSTi=SST0±1°C et Wi=W0±1m/s}. La cartographie représente la valeur moyenne de cet écart-type dans des boîtes de 1°x1°. ... 134
Figure 115 : Ecart-type de la SSS (en psu) par situation de SST et W. Pour chaque triplet (SSS0, SST0, W0) de la base BA1, on calcule l’écart-type de SSS sur l’ensemble des triplets {( SSSi, SSTi, Wi) ; tels que SSTi=SST0±1°C et Wi=W0±1m/s}. La cartographie représente la valeur moyenne de cet écart-type dans des boîtes de 1°x1°. ... 134
Figure 116 : Valeurs moyennes (dans des boîtes de 1°x1°) de la fonction β (en psu) d’estimation du biais, calculée selon l’équation (Eq. 7), sur la base d’apprentissage BA2. ... 135
Figure 117 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°) donnée par le réseau de la classe 1, sur la base B , après apprentissage avec la base 0 géophysiquement équi-répartie BA2. ... 137
Figure 118 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°) donnée par le réseau de la classe 8, sur la base B , après apprentissage avec la base 0 géophysiquement équi-répartie BA2. ... 137
Figure 119 : Distribution des couples (SSS,SST) dans la base d’apprentissage BA1 (gauche) et BA2 (droite). Le code de couleur représente le nombre de couples par boîte de 0.03 psu et 0.02°C (normalisé par rapport au nombre maximal). La zone encadrée correspond à la zone géographique des latitudes inférieures à 40°S. ... 138 Figure 120 : Diagramme de dispersion entre la salinité de référence et la salinité restituée par
le réseau de la classe 1, sur la base B , après apprentissage avec la base 0
géophysiquement équi-répartie BA2. ... 139
Figure 121 : Diagramme de dispersion entre la salinité de référence et la salinité restituée par le réseau de la classe 8, sur la base B , après apprentissage avec la base 0
géophysiquement équi-répartie BA2. ... 139 Figure 122 : Distribution géographique des pixels dans la base d’apprentissage BA extraite à 3
partir de BA2 (nombre de pixels par boîte de 2°x2°)... 140 Figure 123 : Erreur de restitution moyenne (dans des boîtes de 0.1 psu et 0.5°C), en psu, sur la base d’apprentissage BA2, dans le plan (SSS, SST). ... 141 Figure 124 : Répartition des couples (SSS, SST) dans la base BA extraite à partir de 3 BA2. 141 Figure 125 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°)
donnée par le réseau de la classe 1, sur la base B , après prolongation de l’apprentissage 0 sur les situations mal restituées de la baseBA2. ... 143 Figure 126 : Cartographies des erreurs de restitution par saison, pour la classe 1, dans des
boîtes de 1°x1° (chaque boîte contient 4 pixels), après apprentissage avec la base BA3 (prolongation de l’apprentissage sur les situations mal restituées de la base BA2). ... 143 Figure 127 : Valeurs moyennes (dans des boîtes de 1°x1°) de la SSS (haut), SST (milieu) et
W (bas) dans la zone de latitudes sud de la base B0... 145 Figure 128 : Nombre de pixels de la base B0 qui sont associés à des SST<10°C et des
SSS>33.5psu. Ce nombre est calculé dans des boîtes de 0.5°x0.5° qui contiennent au maximum 12 pixels. ... 146 Figure 129 : Répartition des pixels de la zone de latitude sud (<40°S) dans le plan (SSS,SST).
Le code de couleur indique la densité relative des points. ... 146 Figure 130 : Distribution géographique des pixels de la base d’apprentissage mixte BAm
(nombre de pixels par boîte de 2°x2°)... 147 Figure 131 : Cartographie de l’erreur de restitution moyenne (dans des boîtes de 1°x1°)
donnée par le réseau de la classe 1, sur la base B , après apprentissage avec la base 0
mixte BA ... 147 m
Figure 132 : Cartographie de l’erreur de restitution moyenne sur la base B (dans des boîtes 0
de 1°x1°) donnée par la combinaison des sorties du réseau qui a appris sur la base BA1 (pour les latitudes sud) et du réseau qui a appris sur la base BA3 (pour les autres latitudes). Les deux réseaux correspondent à la classe 1, et ont appris avec les mêmes conditions de bruit... 149 Figure 133 : Evolution de la pente entre SSS restituée (par le réseau de la classe 1) et SSS de
référence, par intervalle de SST (<5°C, [5°C ;10°C], [10°C ;15°C], [15°C ;20°C], [20°C ;25°C], >25°C), après apprentissage sur les différentes bases présentées dans ce chapitre. Les mêmes valeurs et corrélations des bruits sont utilisés dans les cinq cas, et les résultats sont évalués sur la même base de test B0. ... 150 Figure 134 : Position des flotteurs ARGO. ... 153 Figure 135 : Couverture de l’orbite de SMOS pendant 1 jour. ... 153 Figure 136 : Schéma de l’inversion itérative d’un modèle direct empirique, avec un first guess de SSS fourni par l’inversion neuronale. ... 155
Liste des tableaux
Tableau 1 : Evolution de l'erreur RMS du réseau d'inversion en fonction du nombre de
neurones cachés (entrées : 51 TBs, SST et W) ... 48 Tableau 2 : Résultats de restitution selon les entrées utilisés pour l'inversion... 53 Tableau 3 : Performances sur la base de test B0 d’un réseau ayant pour entrées des TBs H et V,
et d’un réseau ayant pour entrées des TBs H+V aux mêmes angles d’incidence. ... 59 Tableau 4 : Angles d’interpolation et entrées des réseaux d’inversion pour chaque classe... 93 Tableau 5 : Résultats de la régression non paramétrique des TBs, pour les 10 classes. ... 94 Tableau 6 : Pente entre SSS restituée (par le réseau de la classe 1) et SSS de référence, en
fonction de l’intervalle de SST... 107 Tableau 7 : Performances d’apprentissage en utilisant la base BA1. ... 111 Tableau 8 : Performances de la restitution de la salinité sur les pixels de la demi-orbite D1, en
utilisant la base d’apprentissage BA1... 120 Tableau 9 : Comparaison entre les résultats de restitution obtenus (pour la classe 1) avec des
bruits sur les TBs indépendant ou corrélés. Les valeurs d’écart-type des bruits sont les mêmes (autour de 1 K). ... 124 Tableau 10 : Poids relatifs des zones de latitude nord et sud, en nombre de pixels, dans les
bases d’apprentissage BA1 et BA2... 138 Tableau 11 : Caractéristiques des différentes bases utilisées... 150 Tableau 12 : Comparaison des résultats de restitution obtenus sur la base B0 (pour la classe 1),
après apprentissage sur les différentes bases présentées dans ce chapitre. Les mêmes valeurs et corrélations des bruits sont utilisés dans les cinq cas. Les performances
globales (biais et écart-type) sont calculées pour les salinités supérieures à 20 psu (99,7% de la base B0), car les salinités inférieures ne font pas partie des bases d’apprentissage équi-réparties et donnent des erreurs extrêmes qui dégradent artificiellement les
performances globales. Les meilleures performances par colonne sont marquées en bleu, et les moins bonnes en rouge... 151
Introduction
La salinité est un des paramètres déterminants qui gouvernent la circulation océanique, et constitue donc une composante essentielle du système climatique de la planète. Une meilleure connaissance de la salinité de l’océan, à l’échelle globale, donnerait lieu à un progrès significatif dans les modèles de circulation océanique et d’échange d’énergie avec l’atmosphère, et par conséquent aussi dans la prévision climatique (Cf. section I.1).
Cependant, les seules mesures de salinité dont on dispose aujourd’hui sont des mesures in situ avec une distribution spatio-temporelle très insuffisante. D’où l’intérêt de mesures satellitaire de la salinité, avec une couverture globale et une haute résolution temporelle, comme cela a été fait avec d’autres paramètres importants (température de surface, vitesse du vent, couleur de l’océan, topographie, etc.).
Une telle mesure de la salinité par télédétection a été longtemps écartée à cause d’un obstacle technique lié à la taille de l’antenne nécessaire, dans la bande de fréquence concernée, pour obtenir une résolution satisfaisante à la surface. Des études plus récentes ont proposé de contourner cet obstacle en utilisant un radiomètre interférométrique à synthèse d’ouverture. C’est ce concept novateur, inspiré de l’astronomie, qui sera utilisé pour la première fois dans la mission SMOS (Soil Moisture and Ocean Salinity) pour mesurer l’humidité du sol sur les terres émergées (qui est aussi un paramètre important pour les modèles climatiques ainsi que pour d’autres domaines d’application ([Kerr, 1998])) et la salinité de surface sur l’océan (SSS : Sea Surface Salinity). Le lancement de cette mission de l’Agence Spatiale Européenne, est prévu en 2009. Le satellite embarquera un radiomètre à synthèse d’ouverture qui permettra de mesurer des températures de brillance (TBs) émises par la surface en bande L (1.4 GHz), en double polarisation et à plusieurs angles d’incidence pour chaque pixel observé (section I.2). Ces mesures de TBs permettront ensuite de déduire l’humidité des sols et la salinité de surface de l’océan.
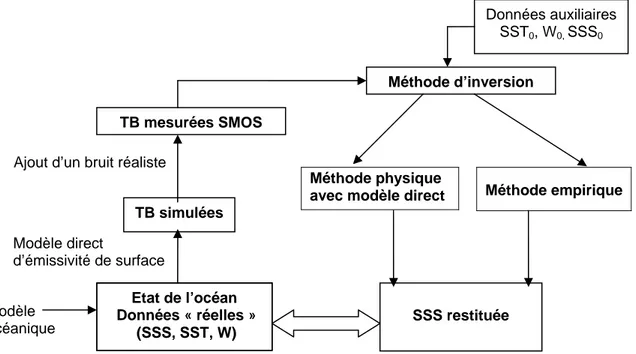
Dans le cadre de la préparation de cette mission satellitaire, cette thèse détaille la mise en œuvre d’une nouvelle méthode pour obtenir une estimation de la salinité de surface de l’océan à partir des températures de brillance qui seront mesurées par SMOS. Les méthodes couramment utilisées se basent sur l’inversion d’un modèle direct théorique qui décrit l’ensemble des phénomènes radiatifs de la surface et de l’atmosphère pour calculer la température de brillance en bande L, à partir de paramètres géophysiques dont la SSS (section I.3). Cependant, les modèles directs actuels sont encore imprécis et incomplets, et ces imperfections risquent d’avoir un impact important sur la SSS, lors de l’inversion (section II.1). Nous proposons alors une méthode d’inversion empirique qui vise à établir une relation statistique entre les TBs et la SSS, et qui sera indépendante des modèles physiques théoriques, en phase opérationnelle, mais qui permettra de prendre en compte de manière intrinsèque les nombreux paramètres qui interviennent dans les mesures de SMOS. Cette méthode est basée sur des réseaux de neurones, qui sont bien adaptés à ce type de problème qui met en jeu beaucoup de variables (sections II.2 et II.3).
Toutefois, l’utilisation des réseaux de neurones pour traiter les mesures SMOS se confronte à plusieurs obstacles pratiques liés à la spécificité de la mission, ce qui fait que les études précédentes qui se sont intéressées à des méthodes d’inversion empiriques se sont
limitées à des cas simplifiés. Le chapitre III expose ces problèmes et détaille, dans chaque cas, la méthode mise en œuvre pour les résoudre. Il en résulte qu’une phase de traitement préalable des données est nécessaire ainsi que plusieurs réseaux d’inversion adaptés au jeu de données disponibles dans chaque cas.
D’un autre côté, les réseaux de neurones nécessitent une étape d’apprentissage sur une base représentative, qui sert à établir une relation statistique entre variables explicatives (entrées) et variables expliquées (sorties). Dans le chapitre IV, on s’intéresse au choix de cette base d’apprentissage, puis à l’évaluation des réseaux d’inversion sur des données simulées réalistes. On y montre qu’un choix judicieux de la distribution des paramètres dans cette base (section IV.2), ainsi qu’une technique d’apprentissage par étapes (section IV.3) permettent d’améliorer significativement les résultats de restitution et de corriger les défauts systématiques qui sont liés à l’importance du bruit de mesure.
Cette étude entre dans la préparation des algorithmes d’inversion qui pourront être utilisés dans le segment sol pour traiter les données SMOS. Les travaux accomplis pendant cette thèse, sur des données simulées, permettront de définir la méthodologie à appliquer, en phase de vol du satellite, de fixer l’architecture des réseaux d’inversion, et préparer le traitement des données réelles.
Chapitre I
Contexte de l’inversion des mesures SMOS
I.1 Intérêt de la mesure de la salinité :
La salinité peut être définie comme la quantité totale de résidus solides dissous en gramme par kilogramme d’eau de mer. Cette définition historique et intuitive (appelée encore salinité absolue) est pratiquement équivalente à la définition officielle adoptée depuis 1978, qui lie la salinité d’un échantillon d’eau de mer au rapport de conductivité entre cet échantillon et une solution standard contenant 32,4356 g de chlorure de potassium par kilogramme ([UNESCO, 1981]). Cette dernière définition a été choisie pour être conforme aux moyens couramment utilisés par les océanographes pour mesurer la salinité in situ : les instruments CTD (Conductivity, Temperature, Depth). L’unité de la salinité ainsi calculée est le psu (practical salinity unit) ou pss (practical salinity scale)1. La salinité moyenne de l’océan est de 35,5 psu et près de 75% de la surface océanique mondiale a une salinité comprise entre 34 et 36 psu.
La mesure de la salinité est indispensable pour l’océanographie et la météorologie. D’une part, c’est un paramètre déterminant dans la formation des masses d’eau et la circulation océanique, car elle modifie la densité de l’eau de mer. D’autre part, sa mesure constitue un bon indicateur permettant d’identifier les masses d’eau en circulation et le cycle des eaux douces (Cf. [Schmitt, 1995], [Schmitt, 2008]). La circulation océanique joue un rôle important dans la régulation du climat, notamment à travers l’échange d’énergie avec l’atmosphère. Or la salinité constitue un important paramètre de forçage des modèles océaniques. La connaissance des variations saisonnières et annuelles de la salinité permettrait notamment d’améliorer la prédiction à long terme du climat, et de prévoir des évènements extrêmes comme El Niño, dans le pacifique équatorial ouest, par l’étude des anomalies salines.
Cependant, malgré l’importance de la mesure de la salinité, les connaissances actuelles de ce paramètre restent très limitées, car il est mesuré exclusivement in situ, par le moyen de bouées dérivantes et mouillages ancrés, de navires océanographiques ou de bateaux marchands. Ce qui ne permet pas d’avoir une couverture spatiale et temporelle satisfaisante, comme le montre la Figure 1 qui regroupe les mesures annuelles de salinité de surface2.
1
Le psu n’est pas à proprement parler une unité physique, mais plutôt une échelle, car la définition de la salinité par le moyen d’un rapport entre deux mesures de conductivité en fait une quantité sans dimension ([UNESCO, 1981], [UNESCO, 1985], [Dubesset, 2000]).
2
Actuellement, la couverture des mesures de salinité est améliorée grâce au déploiement du programme ARGO (Cf. Figure 134, p. 153).
Figure 1 : Nombre de mesures in situ annuelles dans des boîtes de 1°x1° (World Ocean Atlas 2005, [Antonov et al., 2006]).
Seule une mission spatiale peut fournir des mesures systématiques avec une couverture globale et un rythme régulier. La mesure de la salinité apparaît ainsi comme le prochain défi important dans le domaine de la télédétection spatiale de l’océan ([Lagerloef et al., 1995]), après les missions qui ont permis de mesurer le vent, la température de surface, la couleur de l’eau, le niveau des océans, etc., et ont apporté des progrès considérables par rapport aux mesures in situ.
C’est ce défi que se propose de relever SMOS, en mesurant, entre autres, la salinité de surface de l’océan (SSS : Sea Surface Salinity). Car c’est uniquement la couche de surface (environ 1 cm d’épaisseur) qui contribue à l’émissivité de la mer, dans la fréquence de fonctionnement de SMOS (bande L). Néanmoins, la connaissance de la SSS contribue, avec d’autres paramètres (comme la corrélation entre température et salinité, ou les données altimétriques), à la détermination des profils de salinité ([Hansen et Thacker, 1999], [Vossepoel et al., 1999]).
I.2 Présentation de la mission SMOS :
Il a été prouvé depuis les années 1970, notamment lors de l’expérience du satellite Skylab ([Lerner et Hollinger, 1977]), qu’il est possible de mesurer la salinité de surface de l’océan par télédétection radiométrique (antenne passive) en bande L. Cette bande de fréquence (1.4 GHz) est protégée et réservée aux radiomètres passifs. De plus, elle offre une meilleure sensibilité à la SSS, une plus faible influence des autres paramètres comme la température de surface, le vent ou la vapeur d’eau, et permet une observation peu dépendante des aléas des
conditions climatiques. Cependant, en pratique, cela nécessite une antenne de plusieurs mètres si on veut obtenir une résolution assez bonne (quelques dizaines de kilomètres) qui puisse être utile pour améliorer les connaissances océanographiques. En effet, la résolution des pixels observés est inversement proportionnelle à la taille de l’antenne. Et en bande L, une résolution de quelques dizaines de kilomètres requiert une antenne de plusieurs mètres qui peut difficilement être embarquée sur un satellite et déployée dans l’espace. Ce qui explique qu’une mission satellitaire pour mesurer la SSS avec une résolution correcte et une bonne précision était jugée irréalisable en pratique.
Des études plus récentes ([Lagerloef et al., 1995], [Kerr, 1998]) ont redonné de l’intérêt à la télédétection de la salinité en proposant de contourner cette difficulté technique par l’utilisation d’un radiomètre interférométrique à synthèse d’ouverture. Ce concept, inspiré de l’astronomie, permet d’obtenir une résolution spatiale convenable avec un diamètre d’ouverture synthétique qui correspond à la distance entre les éléments d’antenne les plus éloignées. Ce qui permet d’avoir un encombrement compatible avec une mission spatiale légère, contrairement à une antenne à ouverture réelle répondant aux mêmes critères.
Suite à la proposition de [Kerr, 1998], le projet du satellite SMOS, utilisant pour la première fois un radiomètre à synthèse d’ouverture en deux dimensions (MIRAS : Microwave Imaging radiometer using Aperture Synthesis) a été retenu en 1999 par l’ESA (Agence Spatiale Européenne) comme Second Earth Explorer Opportunity Mission, avec un lancement prévu en 2009. Son objectif est de fournir, pour la première fois, des cartes globales de salinité de surface des océans et de l'humidité des sols sur les terres émergées ([Kerr et al., 2001]). Le satellite sera équipé de trois bras d’antenne coplanaires de 4m de long, sous forme de « Y » (Figure 2), qui portent chacun 18 récepteurs, avec 3 récepteurs supplémentaires alignées avec chaque bras, sur la partie centrale (hub). Les trois bras, initialement repliés, vont se déployer en vol. La résolution spatiale à la surface sera en moyenne de 43 km et une couverture globales est atteinte en 3 jours.
Le radiomètre interférométrique mesure des corrélations (visibilités) entre les signaux qui proviennent de chaque élément d’antenne ([Corbella et al., 2004]). Cette information sert ensuite à reconstruire des champs de températures de brillance (TBs)1 selon deux directions
x
T et T ([Anterrieu et Khazaal, 2008]) qui correspondent aux polarisations horizontale (H) et y
verticale (V) des TBs, après un changement de repère entre la surface et l’antenne (mode de polarisation duale). L’instrument peut aussi fonctionner en mode « full-polarization » (mesure des 4 paramètres de Stokes). Ces polarisations sont caractéristiques de l’onde électromagnétique émise par l’océan. Il s’agira ensuite d’inverser ces températures de brillance pour déduire la salinité de surface de l’océan.
Les TBs mesurées avec cette antenne au concept très novateur, utilisée pour la première fois pour ce type d’application, seront toutefois très bruitées, à cause des erreurs instrumentales et de reconstruction d’image (passage des signaux de corrélations aux températures de brillance). Le bruit attendu est de plusieurs degrés Kelvin, alors que la sensibilité des TBs à la SSS est en moyenne de 0.5 K/psu. Cependant, SMOS aura un champ de vue en deux dimensionsavec un recouvrement important entre deux champs successifs, ce qui permettra de mesurer plusieurs TBs pour chaque pixel de la surface, à différents angles
1
Cette reconstruction n’est pas déterministe et constitue une des importantes sources d’erreur pour les TBs SMOS ([Camps et al., 1997]).
d’incidence, au fur et à mesure que le satellite avance (Figure 3). Cette multiplicité de mesures indépendantes pour chaque pixel permettra de réduire le bruit.
On distingue plusieurs niveaux de données SMOS selon l’étape de traitement ([McMullan et al., 2008]) :
- Niveau 1A (L1A) : Données de visibilités calibrées, organisés par champ de vue. - L1B : Températures de brillance (TBs) calculées au niveau de l’antenne, après l’étape
de reconstruction d’image.
- L1C : TBs échantillonnées sur une grille régulière sur la surface de la terre (grille ISEA1 [Suess et al., 2004]). A chaque pixel de la grille est associée une série de TBs correspondant aux angles d’incidence successifs.
- L2 : Cartes globales de SSS et d’humidité des sols au niveau des pixels de la grille ISEA.
- L3 : SSS et humidité des sols après moyennage spatio-temporel. La Figure 4 montre le nombre de salinités moyennées, si on choisit des boîtes de 200 km x 200 km x 10 jours (boîtes GODAE2). Ce nombre varie en fonction de la latitude et de la proximité aux côtes. Il est compris entre 400 et 1000 pour une large partie de l'océan.
Cette thèse s’intéresse au passage du niveau L1C au niveau L2, pour la partie océanique.
D’un point de vue océanographique, la précision souhaitée (des données L3) est de 0.1 à 0.2 psu pour des SSS moyennées sur 200 km et 10 jours (recommandations GODAE) ou sur 100 km et 30 jours (résolution comparable à celle des climatologies standards), pour pouvoir fournir une information utile aux modèles océaniques et climatiques ([Font et al., 2004]). Or une précision de 0.1 psu correspond à une précision de l’ordre de 0.05 K sur la mesure de la température de brillance (si on ne dispose que d’une seule mesure indépendante de TB), ce qui est très difficile à atteindre. Les multiples mesures de TBs pour chaque pixel devraient participer à résoudre cette difficulté. Cependant, il reste, par ailleurs, indispensable d’avoir un instrument très bien étalonné, de savoir parfaitement corriger les effets autres que la salinité affectant la mesure en bande L, et de mettre au point des méthodes d’inversions robustes prenant en compte toutes les informations disponibles.
1
ISEA : Iscosahedron Snyder Equal Area.
2
GODAE (Global Ocean Data Assimilation Experiment) est une expérience internationale d'océanographie opérationnelle, lancée en 2003. Elle a pour objectif de mettre en place "un système mondial d'observations, de réseaux de communication, de modèles et d'assimilation qui sera capable de fournir régulièrement des informations détaillées sur l'état des océans sous une forme propre à promouvoir et à engendrer une vaste utilisation et une disponibilité permanente de cette ressource" (Cf. www.godae.org et [Smith et Lefebvre, 1997]).
Figure 2 : Vue d’artiste de SMOS (d’après www.smos-bec.icm.csic.es).
Figure 3 : À gauche, illustration du déplacement sur le sol du FOV de SMOS (X est une cible à la surface de l'océan). A droite, illustration du déplacement de la cible dans le FOV, dû au déplacement de SMOS (d’après [Dinnat, 2003]).
Figure 4 : Nombre de mesures SMOS sur l'océan, dans des boîtes GODAE (200kmx200kmx10jours). D'après [Boutin et al., 2004].
I.3 Relation physique entre salinité et températures de brillance
I.3.1 Températures de brillance et émissivité
Tout corps émet un rayonnement dont l’intensité dépend de sa température. Ce rayonnement est décrit par la loi de Planck pour un corps noir (émetteur parfait qui convertit toute son énergie thermique en énergie rayonnante, lorsqu’il est à l’équilibre thermodynamique). Cette loi peut s’écrire dans le domaine des micro-ondes :
2 2 λ kT B= Où :
• B est la puissance du rayonnement qu’émet le corps noir par unité de surface, d’angle solide et à une fréquence donnée. Elle est appelée brillance (ou luminance). • k est la constante de Boltzmann.
• T est la température physique du corps.
• λ est la longueur d’onde électromagnétique correspondant à la fréquence considérée.
La température de brillance d’un objet quelconque est définie comme étant la température du corps noir qui émet, à une fréquence donnée, le même rayonnement par unité d’angle solide et de surface (brillance) que cet objet. L’émissivité est le rapport entre la température de brillance et la température physique. Elle est égale à 1, par définition, pour un corps noir, et elle est comprise entre 0 et 1 pour les autres corps (corps gris).
Ainsi, la température de brillance émise par la surface de la mer s'exprime en fonction de la température physique de sa surface (SST : Sea Surface Temperature) et de son émissivité e :
TB = e.SST
L’émissivité de l’eau de mer dépend d’une part de la SSS et de la SST qui déterminent les propriétés diélectriques de la couche de surface de l'eau, et d’autre part de la rugosité de la surface de la mer, qui est liée au vent.
I.3.2 Modèles directs d’émissivité
L’étude scientifique d’un système physique peut être divisée en trois étapes :
1) La recherche d’un ensemble de paramètres qui caractérisent le système.
2) La modélisation directe, qui consiste à établir des lois théoriques permettant, à partir des paramètres du modèle, de prédire les mesures de données observables.
3) La modélisation inverse qui consiste à utiliser les mesures de données observables pour en déduire la valeur des paramètres du système.
Ces trois aspects sont très liés, et un progrès dans la connaissance de l’un entraîne souvent une amélioration des deux autres ([Tarantola, 2005]).
Le modèle direct qui nous intéresse ici est celui qui permet de prédire des températures de brillance de la surface de la mer (ou son émissivité), à partir des paramètres qui décrivent ses propriétés diélectriques et sa forme (rugosité de surface). Il existe différents modèles pour calculer les propriétés électriques de l'eau de mer, pour estimer (à partir du vent) le spectre de vagues qui décrit la rugosité de surface, ainsi que des modèles électromagnétiques qui approximent l'émissivité d'une surface rugueuse. La simulation des TBs émises par la surface de la mer nécessite la combinaison de ces modèles.
I.3.2.1 Modèles de constante diélectrique
Les propriétés électriques d'un corps sont représentées par sa permittivité (ou constante diélectrique). Dans le domaine des micro-ondes, la permittivité de l'eau de mer est une fonction à valeurs complexes de la SSS, de la SST et de la fréquence.
Les modèles de constante diélectrique de l’eau de mer se basent sur la permittivité de l’eau pure, en la modifiant pour tenir compte de la présence de composés ioniques. Les modèles les plus utilisés sont ceux de [Klein et Swift, 1977], de [Ellison et al., 1998] et de [Blanch et Aguasca, 2004]. Ces modèles ont été calibrés sur des mesures radiométriques de solutions de NaCl ([Klein et Swift, 1977]) ou d'échantillons d'eau de mer, mais pour des gammes de fréquence, de salinité et de température différentes (qui ne correspondent pas toujours aux conditions de mesure de SMOS).
I.3.2.2 Modèles de rugosité de la surface
La surface de la mer peut être considérée comme une superposition de vagues de différentes amplitudes et longueurs d'onde. C'est le spectre de vagues, qui est décrit par différents modèles, notamment ceux de [Durden et Vesecky, 1985] et de [Kudryavtsev et al., 1999]. Le paramètre le plus important utilisé par ces modèles pour caractériser le spectre de vagues est la vitesse du vent instantané au point considéré (et à 10m de la surface, noté dans ce qui suit W). Cependant, la rugosité de surface de la mer en un point dépend aussi du vent ayant soufflé à un temps antérieur et à des endroits distants (le fetch), du fait de la propagation des vagues, ce qui est plus difficile à prendre en compte.
I.3.2.3 Modèles électromagnétiques
Dans le cas d'une surface plate, l'émissivité peut être déduite des relations de Fresnel qui régissent la réflectivité spéculaire ([Reul et Chapron, 2001], [Dinnat, 2003]). Mais dans le cas d'une surface rugueuse (ce qui est plus généralement le cas de la surface océanique), le calcul d'émissivité est plus complexe. Il est obtenu, selon la loi de Kirchhoff, par le calcul de l'absorption1 de toutes les ondes planes incidentes sur la surface. Selon le mode de calcul de cette absorption, on distingue deux familles de modèles électromagnétiques :
- Les modèles double-échelle qui divisent la surface en "petites vagues" se propageant sur des "plus grandes vagues". Celles-ci sont décrites par les principes de l'optique géométrique en considérant qu'elles sont composées de facettes planes, alors que les premières sont traitées par la méthode des petites perturbations. Ces deux échelles sont séparées par une longueur d'onde de coupure qui dépend de la longueur d'onde du radiomètre. C'est le cas du modèle de [Dinnat et al., 2002], basé sur celui de [Yueh, 1997]. Ce modèle utilise par ailleurs le spectre de vague de [Durden et Vesecky, 1985], mais en ajoutant un facteur 2 multiplicatif fixé empiriquement.
- Les modèles de petites pentes : cette approche tente d'unifier les modèles électromagnétiques quelles que soient les longueurs d'ondes et les élévations des éléments de rugosité de surface, tant qu'ils gardent des faibles pentes. Il n'est donc pas nécessaire de séparer artificiellement les échelles de surface dans ce type de modèle. C’est le cas du modèle SSA (Small Slope Approximation) [Reul et Chapron, 2001] développé à l’IFREMER2, qui utilise par ailleurs le spectre de vagues de [Kudryavtsev et al., 1999].
I.3.2.4 Modèles d’écume
La formation de l’écume à la surface de la mer a un effet non négligeable sur son émissivité en bande L, notamment à vents forts. Pour tenir compte de cet effet, il faut d’une part modéliser le taux de couverture de la surface par l’écume, qui varie essentiellement en fonction de la vitesse du vent ([Stogryn, 1972], [Monahan et O’Muircheartaigh, 1980], [Reul et Chapron, 2003]), et d’autre part modéliser l’émissivité de cette écume ([Droppleman, 1970],
1
L’absorptivité étant égale à l’émissivité, à l’équilibre thermodynamique.
2
[Stogryn, 1972], [Wilheit, 1979], [Guo et al., 2001]). Cependant, on ne dispose pas encore de modèle d’écume complètement validé en bande L, malgré de récentes expériences qui ont permis de mesurer l’émissivité de l’écume dans cette bande, pour une large gamme d’incidences et de salinités ([Camps et al., 2005a]). D’autre part, les modèles existants utilisent un grand nombre de paramètres qu’il est difficile de quantifier (épaisseur de la couche d’écume, diamètre des bulles d’air, etc.). Pour ces raisons, nous n’utiliserons pas de modèle d’écume pour la simulation des TBs.
I.3.3 Dépendance entre les TBs et les autres paramètres
Les figures suivantes montrent la dépendance de la TB (en polarisations H et V) à la SSS (Figure 5), SST (Figure 6), W (Figure 7) et à l’angle d’incidence (Figure 8), d’après le modèle direct SSA, en utilisant le modèle de constante diélectrique de [Klein et Swift, 1977]. TB est une fonction linéaire décroissante de la SSS et une fonction quasi linéaire croissante de W (non définie pour W=0 m/s)1, telle que calculée par le modèle direct. Alors que la dépendance à la SST et à l’angle d’incidence est non linéaire, avec une sensibilité assez faible de la TB à la SST (généralement inférieure à 0.2 K/°C en valeur absolue, et quasiment nulle pour des températures moyennes d’environ 15°C)..
La différence entre polarisations horizontale et verticale apparaît surtout dans la dépendance à l’angle d’incidence : TBH est une fonction décroissante de l’incidence alors queTB est une fonction croissante de ce paramètre. Le modèle de [Dinnat et al., 2002] donne V les mêmes formes de dépendances ([Dinnat, 2003]), même si la différence entre les températures de brillance calculées par les deux modèles peut atteindre plusieurs kelvins, notamment pour les vents forts ([Philipps, 2005]). La sensibilité de la TB à W est d’environ 0.15 K/m.s-1 dans le modèle SSA (Cf. [Reul et Chapron, 2001]), alors qu’elle est d’environ 0.25 K/m.s-1 dans le modèle de [Dinnat et al., 2002]. Cette sensibilité varie légèrement selon l’incidence et la polarisation.
La sensibilité de TB à la SSS (qui constitue un facteur important pour la qualité de l’inversion des TBs) est très variable selon la SST : elle est de 0.7 K/psu pour une température de 30°C, de 0.45 K/psu pour une température moyenne de 15°C, et de 0.2 K/psu à 0°C, alors que la dépendance de cette pente à W est très faible (Figure 9). Quand l’angle d’incidence augmente, la sensibilité de TBH à la SSS devient légèrement plus faible (de 0.45 K/psu à 0° d’incidence jusqu’à 0.36 K/psu à 50° d’incidence, pour une SST de 15°C), alors que la sensibilité des TBV devient légèrement plus élevée (de 0.45 K/psu à 0° d’incidence jusqu’à 0.57 K/psu à 50° d’incidence, pour une SST de 15°C). La Figure 10 montre la sensibilité de TBH et TBV pour un angle d’incidence de 40°, en fonction de la SST et de W.
Il est à souligner que la relation entre TB et SSS est linéaire, lorsque les autres paramètres sont fixés, mais lorsque SST et W varient, la relation entre TB (à une incidence donnée) et SSS devient plus complexe, et n’est plus déterministe si on ne considère que ces deux variables (Figure 11).
1
L’irrégularité observée sur la Figure 7 pour les TBV pour un vent entre 2 et 3 m/s est due à une instabilité
Figure 5 : TBH (gauche) et TBV (droite), à 30° d’incidence, simulées par le modèle direct (SSA), en fonction
de la SSS, à SST et W fixes (15°C et 7 m/s).
Figure 6 : TBH (gauche) et TBV (droite), à 30° d’incidence, simulées par le modèle direct (SSA), en fonction de la SST, à SSS et W fixes (35.6 psu et 7 m/s).
Figure 7 : TBH (gauche) et TBV (droite), à 30° d’incidence, simulées par le modèle direct (SSA), en fonction de la vitesse du vent, à SSS et SST fixes (35.6 psu et 15°C).
Figure 8 : TBH (gauche) et TBV (droite), simulées par le modèle direct (SSA), en fonction de l’angle
d’incidence, à SSS, SST et vent fixes (35.6 psu, 15°C et 7 m/s). En changeant la valeur de ces trois paramètres, l’allure de la fonction reste semblable.
Figure 9 : Sensibilité de la TB au nadir (en K/psu) à la SST (°C) et au vent (m/s) : SSS TB ∂ ° ∂ (0 ) .
Figure 10 : Sensibilité de la TB (à 40° d’incidence) à la SST (°C) et au vent (m/s) :
SSS TB ∂ ° ∂ (40 ) . A gauche : TBH. A droite : TBV.
Figure 11 : A gauche : SSS en fonction de TB (H+V à 5° d’incidence) à SST et W fixes (15°C±1°C et 7m/s±1m/s). A droite : SSS en fonction de TB (H+V à 5° d’incidence) pour des valeurs de SST et W variables. Les données proviennent d’une base océanique représentative (2% de tirage aléatoire de la base B0 décrite dans
I.4.1), et ne sont pas bruitées. Le code de couleur indique la densité relative des points.
I.4. Simulation des observations :
Cette section présente les données qui seront utilisées dans la suite pour définir et évaluer l’algorithme d’inversion des mesures SMOS. Nous avons recours, d’une part à des modèles océaniques pour simuler les mesures géophysiques, et d’autre part à un modèle direct d’émissivité pour simuler les températures de brillances à partir de ces mesures. On ne s’est pas limité à l’utilisation des mesures in situ de la SSS, pour ne pas rencontrer de problème de manque de données1, et pour pouvoir évaluer les résultats sur toutes les situations géophysiques rencontrées sur l’océan.
I.4.1 Simulation des mesures géophysiques par le modèle
Mercator (Base B0)
Les modèles océaniques Mercator PSY (Prototype System) résultent de l’association entre un modèle de circulation océanique (OPA [Madec et Imbard, 1996]) et un système d’assimilation en temps réel des observations de l'océan mesurées par satellites ou in situ. Cette assimilation utilise la méthode d’interpolation optimale (Cf. [Boutier et Courtier, 1999]).
1
Le programme ARGO n’a atteint son objectif initial de déploiement de 3000 flotteurs de mesures in situ qu’en octobre 2007.
Nous utilisons ici la version PSY3v1 du modèle Mercator. Cette version est forcée avec les champs de tension du vent fournis par ECMWF1, et contrainte par des mesures d’altimétrie de JASON, ERS et GFO ([Drévillon et al., 2005] ).
Nous avons construit une base (appelée B dans la suite) constituée de 12 champs 0 journaliers globaux de MERCATOR PSY3v1, avec une résolution de 0,5°, en prenant un jour de chaque mois entre septembre 2005 et août 2006, pour tenir compte des variations saisonnières. Nous nous limitons aux latitudes comprises entre 65°S et 65°N. Nous obtenons ainsi 1 624 590 pixels. Les figures ci-dessous montrent les valeurs moyennes (dans des boîtes de 1°x1° qui contiennent 48 pixels, au maximum), les écart-types (dus principalement aux variations temporelles) et les histogrammes de distribution des paramètres géophysiques dans cette base. On constate que l’écart-type annuel de la SSS est assez faible (de l’ordre de 0.1 psu), sauf près des embouchures des fleuves. Alors que la SST et W montrent une variabilité beaucoup plus grande, notamment aux hautes latitudes. La Figure 21 montre la répartition des pixels de la base B dans le plan (SSS, SST). L’étendue en salinité semble importante sur 0 cette figure, mais 90% des pixels ont une SSS comprise entre 33 psu et 37 psu. Les salinités inférieures à 20 psu ont un poids négligeable dans la base (0,4%). Elles proviennent essentiellement de la Mer Noire (SSS autour de 18 psu) et de la Mer Baltique (SSS autour de 7 psu. Cf [Gustafsson et Westman, 2002]). Il existe une population importante de pixels associés à des vents quasi-nuls (Figure 20), des SST négatives autour de -2°C (Figure 19), et des SSS autour de 34 psu (Figure 18). Ces pixels correspondent à des latitudes entre 60°S et 65°S (Figure 12, Figure 13 et Figure 14). Comme la base est régulière en latitude et longitude, ces pixels ont plus de poids que si la base était régulière en distance.
1
European Centre for Medium-range Weather Forecast (Centre Européen de Prévision Météorologique à Moyen Terme).
Figure 12 : SSS moyenne, en psu, (boîtes de 1°x1°) dans la base B0. L’échelle est entre 32 et 38 psu.
Figure 13 : SST moyenne, en °C, (boîtes de 1°x1°) dans la base B0. L’échelle est entre 5 et 30°C.
Figure 15 : Ecart-type annuel de la SSS, en psu, (boîtes de 1°x1°) dans la base B0.
Figure 16 : Ecart-type annuel de la SST, en °C, (boîtes de 1°x1°) dans la base B0.
Figure 18 : Répartition de la SSS (en psu) dans la base B0.
Figure 20 : Répartition du module du vent (en m/s) dans la base B0.
Figure 21 : Répartition des couples (SSS, SST) dans la base globale. Le code de couleur indique la densité relative des points.

![Figure 38 : Sensibilité de la température de brillance à la salinité en fonction de la température, en polarisations verticale (a) et horizontale (b), à différents angles d’incidence (d’après [Dinnat, 2003])](https://thumb-eu.123doks.com/thumbv2/123doknet/2149605.9198/57.892.125.767.156.458/sensibilite-temperature-brillance-salinite-temperature-polarisations-verticale-horizontale.webp)