First Simulink Benchmark for Off-Line and Real-Time Simulation of More-Electric Aircraft (MEA) Electrical Power System
Texte intégral
Figure
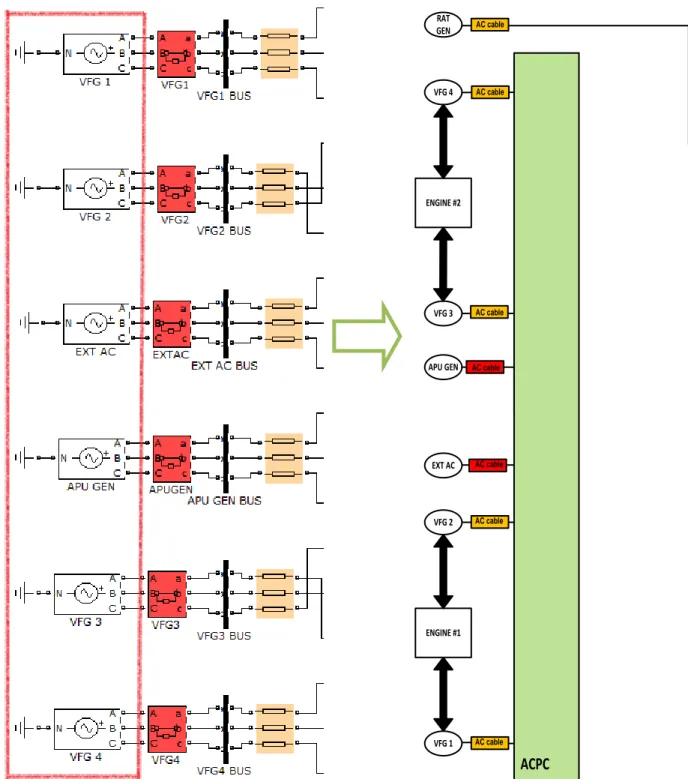
![Figure 2.3. ACPC Electrical System schematic [19] Table 2.3 gives the AC contactor logic with APU available](https://thumb-eu.123doks.com/thumbv2/123doknet/2340240.33737/50.918.116.807.232.987/figure-acpc-electrical-schematic-table-gives-contactor-available.webp)
![Table 2.5. Zero Sequence Resistance assuming a perfect ground plane at 20°C and 400 Hz [21]](https://thumb-eu.123doks.com/thumbv2/123doknet/2340240.33737/63.918.211.709.716.997/table-zero-sequence-resistance-assuming-perfect-ground-plane.webp)

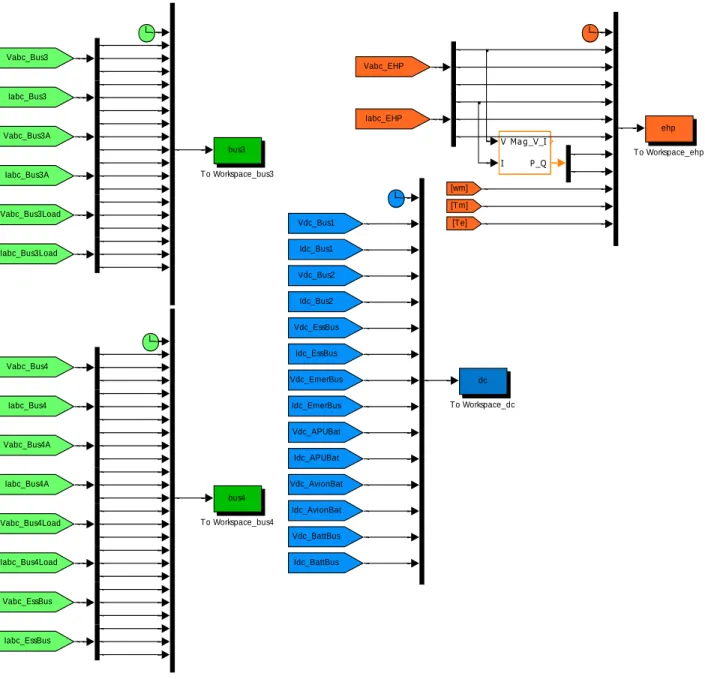
![Figure 2.18 presents the EHP model implemented in Simulink, using the Asynchronous Machine [14]](https://thumb-eu.123doks.com/thumbv2/123doknet/2340240.33737/68.918.118.797.549.885/figure-presents-model-implemented-simulink-using-asynchronous-machine.webp)



Documents relatifs
Involvement of cyclic AMP response element binding protein (CREB) and estrogen receptor phosphorylation in the synergistic activation of the estrogen receptor by estradiol and
● Les équipes des observatoires de recherche et des réseaux de surveillance doivent être encouragées à échanger et travailler ensemble au bénéfice de la gestion des territoires
A Candida albicans CRISPR system permits genetic engineering of essential genes and gene families.. The MIT Faculty has made this article
In this work we present a modeling and simulation strategy for embedded control systems based on Tropos and Agentogy. Our approach differs from existing control system
Real-time elastic deformations of soft tissues for surgery simulation Stéphane Cotin, Hervé Delingette, Nicholas Ayache.. To cite this version: Stéphane Cotin, Hervé
In order to allow the real-time execu- tion of numerical simulation models, computation times have to satisfy a well-defined model of real-time constraints2. Considering the
This study has shown a way to simulate a simple class A power amplifier, using extended state-space representations, the tube model of Norman Koren, and a linear model of the
To walk sideways the robot needs to make two steps to advance length ` y : the first foot moves ` y , and the second foot moves also ` y to be parallel with the first foot, but the
