Unsupervised Perception Model for UAVs Landing Target Detection and Recognition
Texte intégral
Figure
Documents relatifs
(1) impossibillty of raising arm or limitaEion of arm movement; (ii) patient supporting arm; (iii) limping; (iv) patient moving about with walking stick; (v)
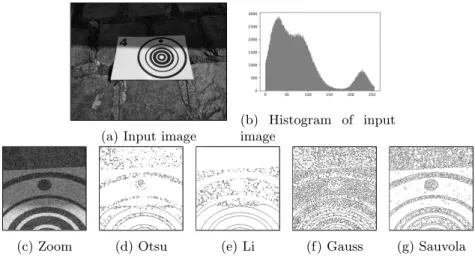
By comparison with a real image where contours points are not precisely labelled, exper- iments illustrate that the new ground truth database al- lows to evaluate the performance
The purpose of this work is to extend the use of the POD method in order to retrieve the modal characteristics of a structure for indirect problems, in the case when the
In order to evaluate the vehicle control system, an experimental prototype of the quadrotor has been designed (see Fig. 1), the dynamic model has been derived by identification of
To do so, it will be necessary to organize the early retirement or retrofit of some existing capital, to accelerate capital turnover and/or to target the drivers of energy
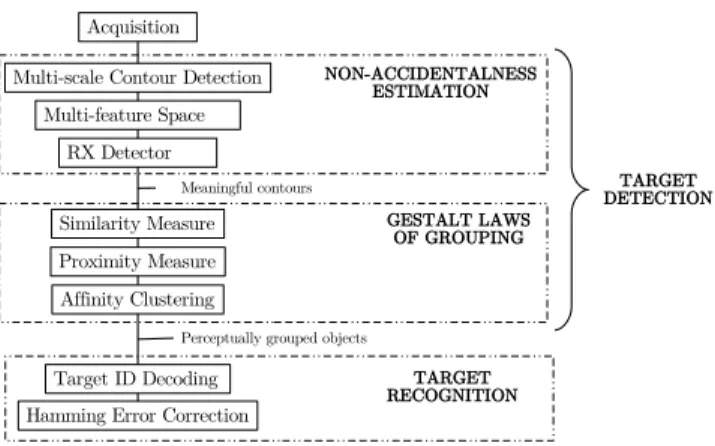
We think that this work is challenging and original for at least two reasons: (i) the target detection and recognition mission is viewed as a long-term sequential
In the present paper, we report the case of a female patient, F.A.R., with heterotopagnosia: She showed impaired performance when pointing to others ’ body parts (e.g., neck)
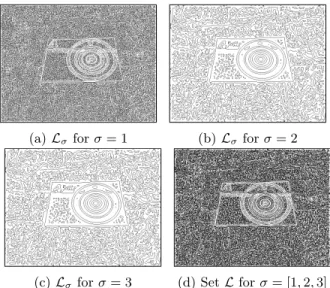
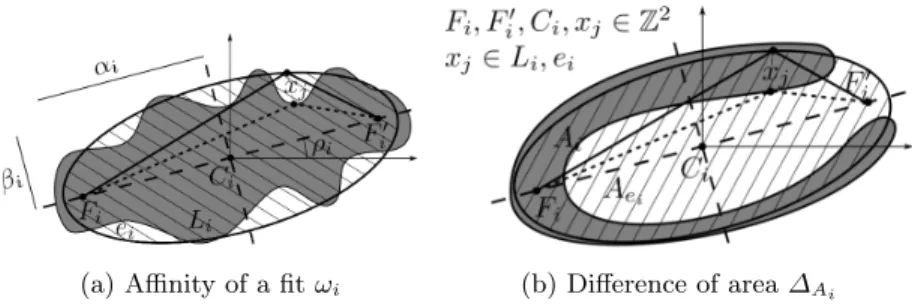
Once all the maximal segments are computed for a given scale, the statistics of the maximal segment length are stored for each original contour point.. Such extraction is implemented
