2D indoor localization system with an UWB multistatic radar
Texte intégral
Figure
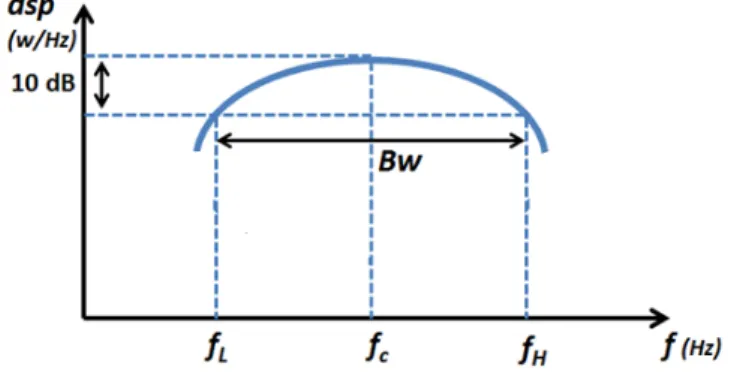
![Figure 2.3 – Spectral masks defined by the FCC for outdoor environment [ 7 ].](https://thumb-eu.123doks.com/thumbv2/123doknet/2618554.58328/61.850.222.635.163.502/figure-spectral-masks-defined-fcc-outdoor-environment.webp)

Documents relatifs
As the characteristics of national health delivery systems are fixed by legislation, those involved in such legislation should increasingly recognize that the promotional,
To explore this idea, the paper uses the Flexible Least Squares (FLS) developed by Kalaba and Tesfatsion (1990) for estimating a model with varying coe¢ cients; our main result is
Both charm and beauty are being studied at STAR through the spectra of non-photonic electrons (NPE) which come from semi-leptonic decays of heavy flavor mesons.. The
Since we assume that Funneling congestion is the result of short- lived phenomena, it is appropriate for gateways which are the sites of this congestion to attempt to smooth
Hint: Calculate Velocity at pipe and derive
For instance, the flags ML and MAP, when equal to 1, enable the computations of the ML and MAP estimators, FIGS=1 enable the display of figures while FIGS=0 forbid this
Creating hurricanes requires a motor capable of turning the blade extremely fast.. To see the rotation of the blade moves air is a
natural by the use of the kernel, whih maps the original data into a (large.. dimensional) Eulidean spae (see [10, 11, 12℄ for on-line versions
