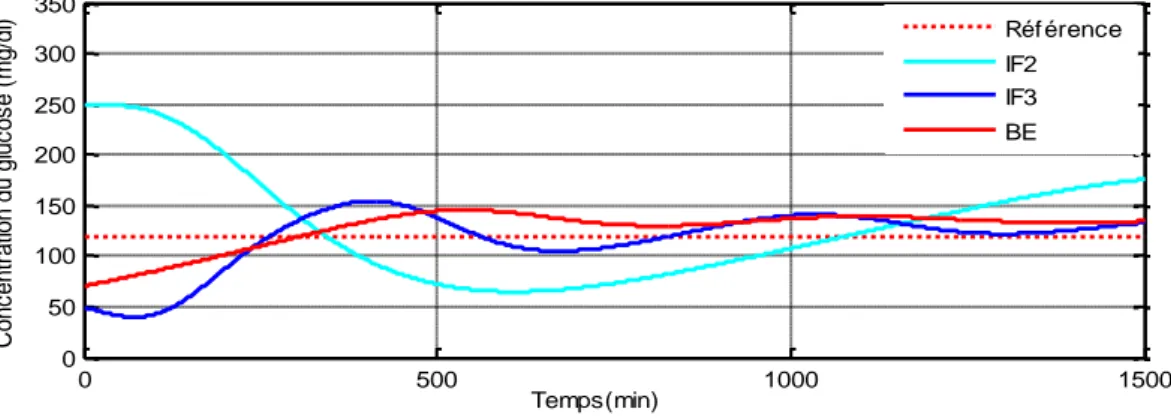
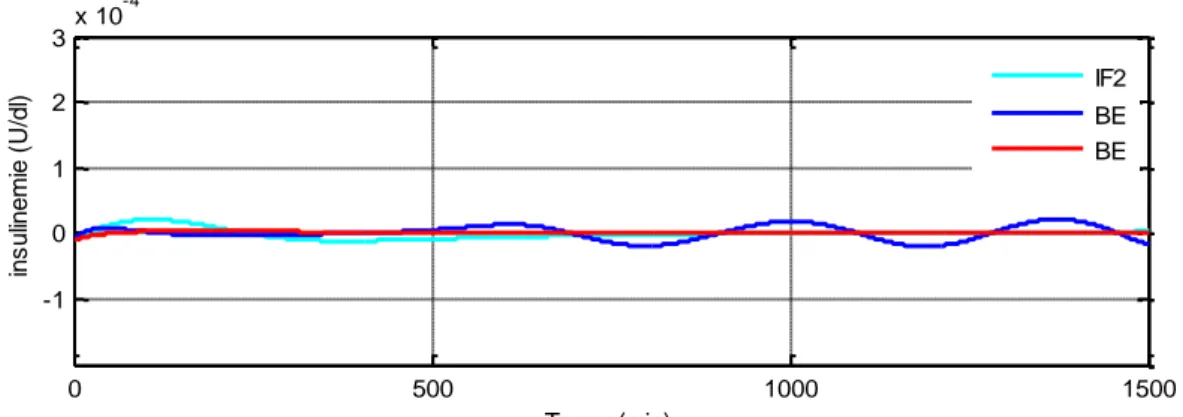
Contribution à la commande adaptative robuste des processus physiologiques par mode glissant : contrôleur flou et modèle de référence
Texte intégral
Figure
Documents relatifs
- SuS schreiben ihre Beobachtungen, Überlegungen AH S.41 auf Aktivität zur Kontrolle der Ziele: - SuS können 7 von 10 Geräuschen den Bildern im Arbeitsbuch zuordnen..
De plus, il serait intéressant d’avoir des résultats plus explicites quant à la manifestation de la dimension spirituelle chez les parents des enfants / adolescents malades, la
To synthesize a prefunctionalized Grubbs-type ruthenium carbene initiator for ring-opening metathesis polymerization without the need of any purification step, we devised a
More specifically, in the force versus extension profiles of polymers with cis double bonds in the backbone, a sudden extension increase and relaxation in probed force are
5) Placer le point D tel que ACBD soit un rectangle. Écrire une expression qui traduit ce programme en détaillant chaque étape.. 3) En rédigeant votre réponse à l’aide
2) Dans une boutique de jeu vidéo, tous les jeux de Nintendo DS ont le même prix. Sachant que 5 jeux coûtent 123 euros, combien coûtent 13 jeux ?. On pourra s’aider en complétant
[r]
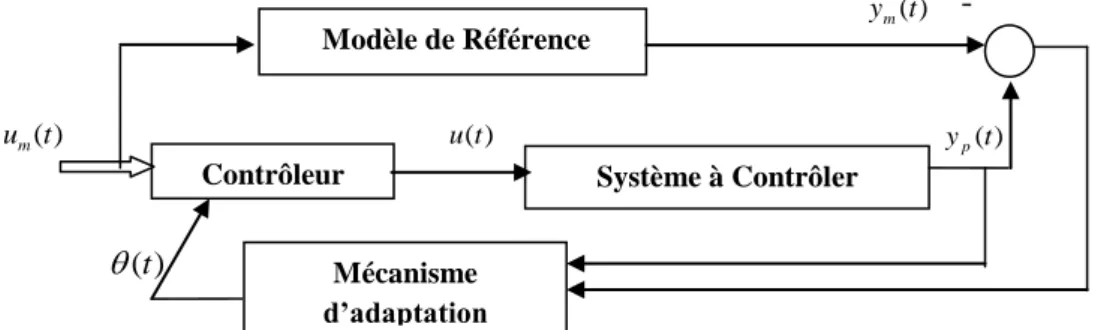
Les travaux présentés dans cette thèse de Doctorat ont pour objectif principal le développe- ment de structures de commande adaptative floue combinées à différentes approches
