Etude du comportement du sable de chlef sous sollicitations dynamiques
Texte intégral
Figure




Documents relatifs
Les principaux objectifs fixés étaient (1) de contribuer à mettre à jour les références en matière de composition chimique du lait de brebis au travers
On note que la résistance à la liquéfaction représentée par le déviateur à 20% de déformation axiale (déviateur maximal), augmente sensiblement avec la densité du sol pour
Afin de mettre en évidence l’influence du caractère fortement hygroscopique de la paille [BOU 14] sur le comportement thermique du matériau final, on s’intéresse
L‘étude paramétrique de ce système de fondations par le logiciel plaxis permettra certainement de mettre en évidence les limitations physiques quant au rapport
D’ailleurs, il existe des modèles numériques qui permettent de modéliser le comportement sismique des bâtiments ainsi que la vulnérabilité à grande échelle
Des bases d’essais relativement complètes sur le même alliage existent déjà : [Bouvet, 2001, Bouvet et al., 2002, Bouvet et al., 2004, Helm et Haupt, 2001, Helm et Haupt, 2003] pour
J’ai pu mettre en évidence que l’enquête par entretien était le moyen le plus approprié pour répondre à mes objectifs de recherche, c’est-à-dire approfondir le premier état
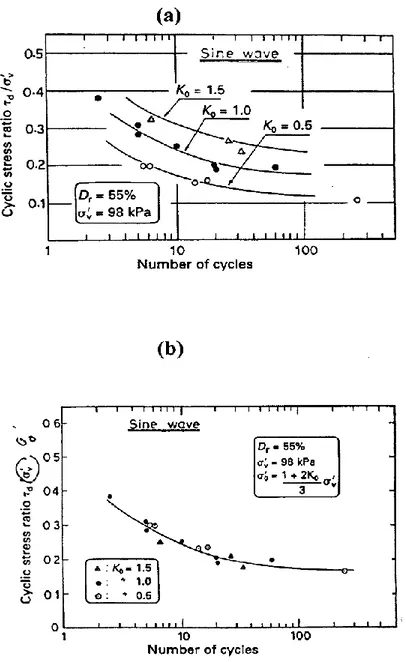
Figure 47 : Evolution du rapport de contrainte cyclique pour atteindre 5% de déformation en fonction du nombre de cycles pour différents degrés de saturation (Okamura et Soga 2006)
