An Efficient Representation Format for Fuzzy Intervals Based on Symmetric Membership Functions
Texte intégral
Figure


Documents relatifs
This paper presents two approaches for codifying the contextual underpinnings (framework) and cognitive interpretation for capturing VoI utilizing source reliability,
This paper examines the problems of maximum and minimum cost flow determining in networks in terms of uncertainty, in particular, the arc capacities, as well as the
In this section, we will present some further results on the spectrum such as the question of characterizing the image of the spectrum and the subdifferential of a function of
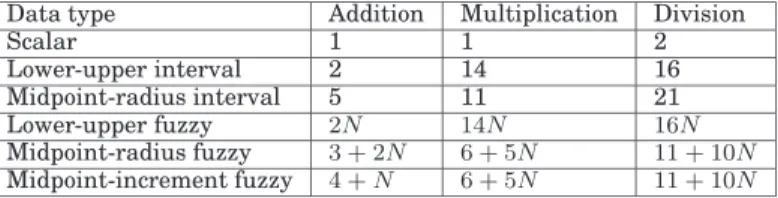
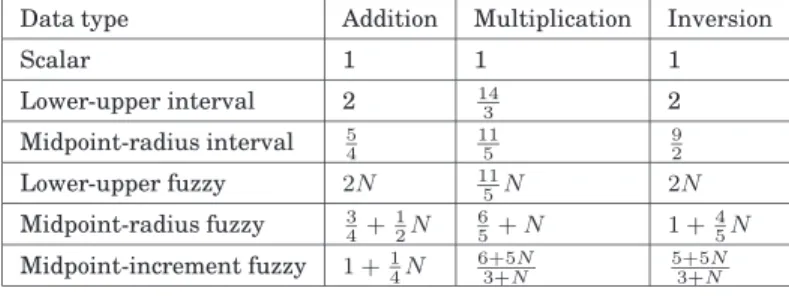
Table III shows the number of instructions, such as basic operations with different rounding, minimum, maximum and absolute value, required in the addition, multiplication and
The minimum and maximum number of rational points on jacobian surfaces over finite fields..
Triangular and trapezoidal membership functions retained in this work are defined using 4 linear functions, completely described by 5 points (a, b, c, d and e) as defined in Equations
(4) Remark 2 We note that, for bounded and continuous functions f, Lemma 1 can also be derived from the classical Crofton formula, well known in integral geometry (see for
We now apply our main result to the computation of orness and andness average values of internal functions and to the computation of idempotency average values of conjunctive
