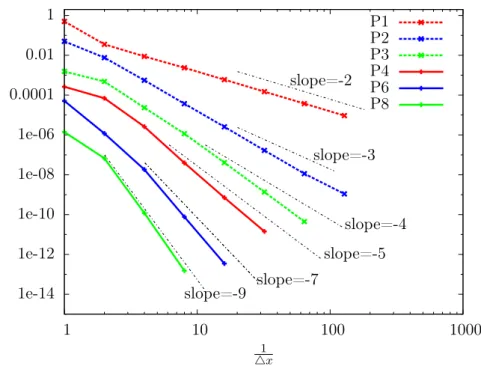
Wavelet-based multiscale simulation of incompressible flows
Texte intégral
Figure



Documents relatifs
https://www.who.int/macrohealth/en/.. ﺚﻟﺎﺜﻟا ﻞﺼﻔﻟا : ﺔﻴﻧﺎﺴﻧﻻا ةﺎﻧﺎﻌﻤﻟا ﻲﻓ رﺎﻤﺜﺘﺳﻻاو ﻲﺤﺼﻟا ﻦﻣﻸﻟ ةدﺎﺠﻟا دﻮﻬﺠﻟا ﻦﻴﺑ ﺎﻣ ﺔﺤﺼﻟا 95 ﺔﺟﺎﺣﻟا ﻩذﻬﻟ ﺔﺑﺎﺟﺗﺳا ﻲﻓ
vista della campagna di affreschi nella navata portò a una riduzione delle aperture e a un cambiamento radicale della regia della luce diurna concentrandola nel va- no
The same models as in the simulated data application (see Section 3.1.2) are compared in this real data application, excluding RF which cannot be used in the real data case.. Also,
Comme nous allons le voir dans le paragraphe suivant, la langue poss`ede aussi une topographie de surface et naturellement, la question se pose de savoir si un parall`ele peut
Regarding attentional maintenance, some studies reported a higher viewing time on negative pictures than on neutral pictures at early processing stages in healthy volunteers 48
De plus, comme l’ajout du liant Nalco permet la formation d’agglomérats plus résistants mécaniquement, cela signifie qu’il serait possible de lixivier ces agglomérats
Ceci est indispensable pour pouvoir déplacer le sujet et son support, le maintenir dans le champ du viseur, et en même temps corriger la mise au point (en employant
Analysis of fractalkine receptor CX(3)CR1 function by targeted deletion and green fluorescent protein reporter gene insertion. Subcapsular sinus macrophages in lymph nodes
