Root cause analysis of actuator fault based on invertibility of interconnected system
Texte intégral
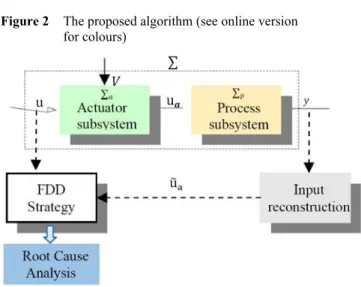
Figure
![Figure 3 Reconstructed input F , F from output T u p p , T u in case (a) 0 20 40 60 80 1000246x 10-6 Time [s]Flowrate [m3/s]](https://thumb-eu.123doks.com/thumbv2/123doknet/3088613.87380/12.892.491.775.155.874/figure-reconstructed-input-output-t-case-time-flowrate.webp)
![Figure 6 Residuals for identifying fault cause in utility fluid in case (a) 0 20 40 60 80 1000123x 10-5 Time [s]](https://thumb-eu.123doks.com/thumbv2/123doknet/3088613.87380/13.892.108.394.105.817/figure-residuals-identifying-fault-cause-utility-fluid-time.webp)
![Figure 9 Residuals for identifying fault cause in process fluid in case (a) 0 20 40 60 80 10000.511.52x 10-6 Time [s]](https://thumb-eu.123doks.com/thumbv2/123doknet/3088613.87380/14.892.488.780.110.788/figure-residuals-identifying-fault-cause-process-fluid-time.webp)
Documents relatifs
Firstly, the case where system (1) is linearly observable is analyzed. This means that the corresponding observer may be designed on the basis of the linear residue. Secondly,
However, the existent results consider the actuators as the constants in the input coefficient matrix of the process system and consider actuator faults as the changes
The left invertibility of individual subsystem is required for ensuring faults occurred in actuator subsystem can be transmitted to the process subsystem uniquely, and
For linear valve, f (X) = X, the valve opening is related to stem displacement. The candidate root causes of an actuator fault could be valve clogging, stop of utility
Relative to the classical concept of observability, the proposed definitions are appli- cable to a much broader family of variables including unmeasured state, unknown input,
Abstract: Based on the interacting multiple model (IMM) estimator for hybrid system state estimation and on the adaptive Kalman filter for time varying system joint
Unlike classical adaptive Kalman filters, which have been designed for state estimation in case of uncertain- ties about noise covariances, the adaptive Kalman filter proposed in
Under the assumption that an efficient fault diagnosis module is integrated in the reconfigurable control to provide sufficient information, an active fault tolerant con- trol
