T
T
H
H
È
È
S
S
E
E
En vue de l'obtention du
D
D
O
O
C
C
T
T
O
O
R
R
A
A
T
T
D
D
E
E
L
L
’
’
U
U
N
N
I
I
V
V
E
E
R
R
S
S
I
I
T
T
É
É
D
D
E
E
T
T
O
O
U
U
L
L
O
O
U
U
S
S
E
E
Délivré par L'INSTITUT NATIONAL POLYTECHNIQUE DE TOULOUSE Discipline ou spécialité : Énergétique et Transferts
JURY
LACHI Mohammed (Rapporteur) MAILLET Denis (Rapporteur)
BATSALE Jean-Christophe (Président du jury) PRADERE Christophe (Membre)
DELENNE Jean-Yves (Membre) FUDYM Olivier (Membre)
Ecole doctorale : Mécanique, Energétique, Génie civil & Procédés Unité de recherche : Centre RAPSODEE. EMAC-CNRS FRE 3213
Directeur(s) de Thèse : FUDYM Olivier Rapporteurs : LACHI Mohammed et MAILLET Denis
Présentée et soutenue par Francisco Hernán SEPÚLVEDA PALMA Le 10 décembre 2009
Titre : Déformation de champs thermiques et traitement d'images infrarouges. Application à la caractérisation de systèmes dynamiques.
Université de Toulouse École doctorale : MEGeP
Centre RAPSODEE, UMR EMAC-CNRS 2392 Résumé
Par
Francisco Hernán SEPÚLVEDA PALMA
Déformation de champs thermiques et traitement
d’images infrarouges. Application à la caractérisation
des systèmes dynamiques.
Les caméras infrarouges modernes permettent d’accéder à la mesure de champs thermiques et de leur évolution temporelle. Le traitement d’images obtenues permet d’analyser la signature thermique d’objets mobiles ou de fluides en écoulement. Dans ce contexte nous avons fait l’étude de trois expériences différentes. La première consiste à suivre des billes mobiles et à évaluer leurs coefficients d’échanges thermiques avec l’environnement par l’estimation de temps caractéristiques. Dans le deuxième cas, nous faisons une comparaison entre deux fluides qui s’écoulent dans un microcanal, afin de déterminer les variations relatives des propriétés thermiques. La dernière application consiste à réaliser une cartographie de diffusivité thermique avec une source de chaleur mobile.
University of Toulouse Doctoral school: MEGeP
Centre RAPSODEE, UMR EMAC-CNRS 2392 Abstract
by
Francisco Hernán SEPÚLVEDA PALMA
Deformation of thermal fields and infrared image
processing. Application to the characterization of
dynamical systems.
The modern infrared cameras allow the measurement of thermal fields and their temporal evolution. Infrared images processing is suitable to analyze the thermal signature of moving objects or fluid flows. In this context, we made the study of three different experiments. The first one is relative to infrared tracking of randomly moving balls and then estimate their thermal exchanges with the environment by the estimation of some characteristic time. In the second case we made a comparison between two fluids which flow inside a microchannel in order to determine the relative changes of thermal properties. The last application was to estimate a thermal diffusivity field with a mobile heat source.
REMERCIEMENTS
Cette thèse est la finalisation d’un travail de trois années, que j’ai fait à Albi… mais je viens du Chili ou j’ai fait mes études au collège ‘Claretianos’ qui n’existe plus, mais à l’époque un professeur m’avait motivé à étudier la physique et m’avait montré les premières règles de cette matière, a toi Americo Rojar merci beaucoup.
Une fois à l’université j’ai rencontré différents types de professeurs …sympas et .. pas trop, qui après tout m’ont au moins donné une formation très variée, tant au niveeau professionnel que personnel… Je veux dire que avant de finaliser l’université, j’ai eu la chance de travailler au laboratoire d’ultrasons de l’Université de Santiago de Chile (Usach), où vous pouvez trouver une équipe de travail intense au niveau personnel et professionnel, où tous les jours il y a une conversation amicale et professionnelle de haut niveau, et je veux remercier mes amis que je trouve dans cette période, mes collèges d’université aussi comme P. lara, Pato jorquiera Oriel arriagada R. fuentes J Rodriguez N. Gatica. E. rodrigues… enfin je ne peux pas les mentionner tous mais jamais je n’oublierai cette étape fantastique et intense de nos vies et surtout ceux qui étaient responsables de ce laboratoire et que j’ai connus comme professeurs, mais que avec le temps je sens comme mes amis, et qui aujourd’hui sur le plan professionnel sont des personnes qui représentent pour moi un très bon exemple à suivre, merci beaucoup a vous professeur Luis Gaete et Yolanda Vargas.
Au Chili, tout le monde n’a pas la possibilité d’aller à l’université sans galérer, et celà a été mon cas, j’ai presque dû laisser tomber l’université deux fois, n’ayant pas les moyens de continuer, mais à toutes les personnes qui m’ont aider dans un moment difficile merci beaucoup.
Ici en France j’ai connu des personnes de différentes nationalités, qui m’ont donné une façon différente de regarder la vie et qui m’ont aidé à m’adapter, à faire d’incroyables soirées, à partir en congés comme aussi sur le plan Professionnel avec les conseils pour les expériences, les détails de programmation, la correction de la thèse, etc… enfin, vous étiez présents un peu partout merci à vous, les doctorants de l’école, le personnel technique de l’école qui m’ont aidé au montage du laboratoire et à la caractérisation des matériaux, à vous tous merci beaucoup.
Je veux remercier aussi l’équipe du TREFLE qui a partagé son expérience et savoir-faire avec nous, je ne peux pas oublier les journées des travaux avec vous, et j’ai trouvé toujours une façon différente de regarder la thermique comme aussi de faire la découverte d’outils nouveaux pour faire les montages et traitements de données.
Yo llegue a Francia gracias a la invitación de mi director de tesis Olivier Fudym, gracias por mostrarme la térmica, desde el un punto de vista diferente a mi formación como ingeniero y que tiene innumerables aplicaciones, pero yo debo agradecerte también tu calidad de persona, con esa forma de ver la vida que también es un ejemplo para mi, tú has sido un gran apoyo aquí en Francia, desde todo punto de vista…..gracias Olivier por todos esos consejos y oportunidades de conocimiento que me has dado.
A mi familia que en forma incondicional me ayuda, gracias a ti mama por ser así con ese carácter fuerte y que además me has dado , gracias también por apoyo cuando este está débil, gracias también a mis hermanas que se han hecho cargo de un montón de tareas, que eran mi responsabilidad en chile, además por darme ese calor de hogar a la distancia, a ustedes tres les digo que las quiero mucho y gracias por todo ese apoyo de cariño y fuerza que me dan y que me ha permitido materializar esta tesis.
Enfin, je veux exprimer ma reconnaissance aux membres du Jury, Messieurs les Professeurs M. Lachi, D. Maillet, J.C. Batsale, C. Pradere, O. Fudym et J.Y. Delene, qui me font l'honneur de juger ce travail.
Lo más importante en la vida es sonreírle al mundo con optimismo y fe….
NOMENCLATURE
Dénomination Signification Unités
S Voltage de charge électrique V
S Offset de charge électrique V
L Flux photonique reçu pendant le temps
d’intégration V m
-2
m Niveau de numérisation V
s Coefficient de détection du détecteur m²
DL Niveau numérique Resolution 14 bit
DL Niveau numérique de référence Resolution 14 bit
T Température de cavité K
M Constante d’émission K-1
C Offset de conversion analogique numérique Resolution 14 bit
Niveau numérique moyen d’étalonnage Resolution 14 bit
ℎ Constante de Planck W s²
Constante de Boltzmann J K-1
c Célérité de la lumière m s-1
TCN Température de Corps noire K
∙ Emissivité de corps noir Sans unités
Image de corrélation K
Image camera pour la corrélation K
(xref,yref) coordonnes de référence Sans unités
( , ) point sur le bord pour la méthode de hough Sans unités
Distance entre le bord et le point de référence m
Capacité thermique J kg-1 K-1
Volume m3
Température K
Température au infinie K
Surface m²
̂ Temps caractéristique s
Nombre de Biot Sans unités
Nombre de Nusselt Sans unités
Conductivité thermique W m-1 K-1
, Température dans l’espace discrète K
∆ , ∆ , ∆ , ∆ Dimension de l’espace discrète et taille de
pixel m
Épaisseur de l’échantillon m
Distance de la surface au microcanal m
Matrice de sensibilité dépende du valeur
sur la matrice
Observable dépende du
valeur sur la matrice
∗ Diffusivité thermique apparent m² s-1
Diffusivité thermique m² s-1
Nombre de Peclet Sans unités
Vitesse du fluide m s-1
Composantes de la vitesse du flux m s-1
Diamètre hydraulique m
Nombre de Fourier Sans unités
Distribution spatiale du flux Sans unités
Intervalle du temps pour l’estimation s
, Distribution initiale de température K
, coefficient de corrélation pour le pixel i,j dans
un période t de temps Sans unités
n Nombre d’image pour l’estimation Sans unités
nf Nombre d’image prises en compte pour la
Symboles grecs
Gain d’étalonnage en pixel i,j W-1
Offset d’étalonnage en pixel i,j Resolution 14
bit
Flux incident dans l’étalonnage W
Longueur d’onde Hz
L’angle du point sur le bord et la référence rad
(+90) l’angle d’orientation rad
Densité Kg m-3
, Terme source W m-2
Matrice de paramètres dépende du
valeur sur la matrice
, , , , , Flux de chaleur superficiel W m-2
Coefficient de proportionnalité m-2 s
, Flux incident sur la surface W m-2
Écart type Sans unités
spécifique
Erreur Sans unités
SOMMAIRE
Introduction générale ………
1CHAPITRE 1
Caméra Infrarouge : une chaîne de mesures
thermiques indirectes
. ... 51.1 Différents types de capteurs ... 6
1.2 La chaîne radiométrique ... 7
1.3 Procédure NUC, CNUC et NETD... 10
1.4 Résolution spatiale ... 16
1.5 Conclusions ... 18
CHAPITRE 2
Suivi d’Objets à Partir des Images Infrarouge.
Application au Milieu Granulaire
. ... 192.1 Méthodologie du Travail. ... 20
2.2 Montage expérimental ... 21
2.3 Méthode de la corrélation croisée. ... 22
2.4 Transformée de Hough. ... 25
2.5 Utilisation des outils de morphologie mathématique. ... 29
2.5.1 Méthodologie du travail, pour un objet. ... 33
2.5.2 Méthodologie de travail pour de multiples objets. ... 39
2.6 Modèle thermique. ... 44
CHAPITRE 3
Ecoulement de fluides en Microcanaux Céramique.
Application aux nanofluides.
... 513.1 Méthodologie de travail. ... 53
3.2 Montage experimental ... 53
3.3 Mesure et modèle thermique appliqué... 57
3.4 Résultats expérimentaux. ... 63
3.5 Modèle de conduction sur un élément volumétrique du microcanal. ... 69
3.6 Conclusion ... 81
CHAPITRE 4
Cartographie de diffusivité thermique, avec
excitation thermique mobile
. ... 834.1 Méthodologie du travail ... 84 4.2 Modèle direct. ... 85 4.3 Méthode inverse ... 87 4.4 Montage expérimental ... 89 4.5 Résultats de la simulation ... 90 4.6 Résultats expérimentaux ... 114 4.7 Conclusion ... 127
Conclusion générale………..…
128Références Bibliographiques………..
131Annexe A………...
136Annexe B………...
144Annexe C………...
146LISTE DES FIGURES
I.1. La chaîne radiométrique. 8
I.2. Chaine d’acquisition de donnes [3]. 9 I.3. Sensibilité s dépendant du temps d’intégration. 10 I.4. Exemple de 3 pixels, Niveau numérique de sortie en fonction du
flux incident.
11 I.5. Montage d’étalonnage de la caméra IR. 12
I.6. Schéma d’étalonnage 12
I.7. Courbe d’étalonnage et flux de chaleur incident sur la caméra IR.
13 I.8. Procédure pour obtenir la valeur de NETD. 14 I.9. NETD et STD, pour un temps d’intégration (TI) de 200 et 1000
(µs).
15
I.10. Valeurs de ij et ij 16
I.11. Exemple des erreurs sur la construction d’une image 17
II.1. Montage expérimental 21
II.2. l’image (a) Image thermique (b) Auto-corrélation de l’image (a), méthode matricielle.
22 II.3. Corrélation croisée avec FFT et IFFT. 23 II.4. (b) Auto-corrélation de l’image (a), avec l’aide de FFT et IFFT. 23 II.5. (c) Corrélation de (a) et (b) (FFT), (d) Corrélation de (a) et (b)
(Matricielle).
24 II.6. Résultat de la corrélation à deux images pour une séquence de
20 images consécutives.
24 II.7. Description géométrique de la transformée de Hough 25
II.8. Protocole de calcul de la position des billes, méthode de Hough. 26 II.9. Résultat obtenus par la méthode de Hough. A) image réelle de
température; b) Détection de contour (Canny); c) Accumulateur ; d) Accumulateur filtré par un « chapeau mexicain »
26
II.10. Exemple, méthode de Hough 27
II.11. Résultats d’estimation des positions avec la méthode de Hough.
28 II.12. Effet d’un changement de seuil de filtrage. 29 II.13. (a) Objet A et elément structurant B (b) Dilatation de A par B
(c) érosion de A par B 32
II.14. Protocole pour trouver les billes, méthode morphologique. 34 II.15. a) Image Caméra, b) Image en niveaux de gris, c) Image
binaire.
34 II.16. a) Image étiquetée ; B) Image Thermique, où le cercle montre
la position de la bille.
36 II.17. (a) Masque construit. (b) Valeurs de température. 36 II.18. a) Trajectoire en 50 images consécutives b) Zoom sur la bille. 37 II.19. Température et vitesse, d’une bille en 50 images
consécutives.
37 II.20. Températures dans le temps, billes en mouvement aléatoire. 38 II.21. (a) Températures (bille de11 mm), avec et sans vitesse. (b)
Vitesse de la bille mobile en fonction du temps.
38 II.22. a) Image Caméra; b) Image binaire; c) Image avec érosion et
d) Billes trouvées.
39 II.23. Image initiale et finale de la séquence 40 II.24. Image étiquetée et granulométrie trouvée sur l’image. 40 II.25. (a) Trajectoires et (b) Températures des billes dans le temps. 41 II.26. (a) Vitesse et (b) déplacement des billes dans le temps. 41 II.27. Exemple de trajectoire pour 5 billes à deux instants différents. 42 II.28. (a) Température des 5 billes (b) Zoom sur la fin de l’essai. 42
II.29. (a) Billes en bois de pin avec et sans peinture noire. (b) Image thermique de la bille en bois, sans peinture.
43 II.30. Comparaison entre les billes en bois de pin. 43
II.31. Bille en bois de pin. 44
II.32. Derivée temporelle en fonction de l’écart (T-Tinf). 45
II.33 Résidu d’estimation dans le cas d’une bille de 11 mm. 47 II.34 Comparaison des coefficients d ‘échange h estimés et
coefficient instantanés recalculés à partir de l’équation. (II.1).
48 II.35 Suivi de chaque bille dans son repère mobile. 50 II.36. Image thermique avec la trajectoire et repère de la bille en
bois .
50
III.1. Montage. (a) Pompe pousse-seringue et camera IR. (b)
Support et diode laser. 54
III.2. Construction de l’échantillon céramique avec microcanaux. 55 III.3. Géométrie du microcanal utilisé (dimensions en mm). 55 III.4 Définition de la couche supérieure du microréacteur. 57 III.5. Déformation du champ de température avec et sans
écoulement. 60
III.6. Correction des images. (a) Ti,j, (b) T camera, (c) Tfond. 62
III.7. Cartographies de et , pour l’eau pure (5000 et 15000
(µl/h)). 64
III.8. Cartographies de et pour la solution à 4% (5000 et
15000 (µl/h)). 65
III.9. Moyenne selon l’axe y de et 66 III.10. Graphique de ° au-dessus du microcanal (ligne 142). 67 III.11. (a) Minimum et (b) maximum de ° ,à différents débit.
67 III.12. Valeur moyennée de le long du microcanal. 68 III.13. Elément de volume du microcanal. 69 III.14. (a), H2O avec un débit de 5000 (µl/Hr). 72 III.14. (b), solution au 4% avec un débit de 5000 (µl/Hr). 72
III.15. (b), Estimation de , solution au 4%. 73 III.16. Graphique de en fonction du débit. 74 III.17. Comparaison de estimé et théorique. 75 III.18. Dérivée de T sur le microcanal, H2O. 76
III.19. Dérivée de T sur le microcanal, solution à 4%. 77 III.20. Peclet, Diffusivité apparente a* et la diffusivité relative,en
fonction du débit (x1000(µl/hr)). 79
IV.1. Simulation immobile. 86
IV.2. Simulation mobile. 87
IV. 3. Montage expérimental. 90
IV.4. Schéma d’estimation de la diffusivité avec corrélation. 91 IV.5. Distribution de températures sur la ligne 70. 93
IV.6. Masque aléatoire de 5x5 pixels 94
IV.7. Masque aléatoire de 15x15 pixels 95
IV.7. Masque aléatoire de 15x15 pixels 96
IV.9. , circulaire (fa). 97
IV.10. , circulaire (fb). 98
IV.11. Distribution de température de la ligne 70. 99
IV.12. , gaussienne (g1). 100
IV.13. , gaussienne (g2). 101
IV.14. , gaussienne (g3). 102
IV.15. , gaussienne (g4). 104
IV.16. , gaussienne (g5). 105
IV.17. , Laser mobile 1. 107
IV.18. , Laser mobile 2. 109
IV.19. , Laser mobile 3. 111
IV.20. , Laser mobile 4. 113
IV.21. Zones 1, 2 et 3, de la lame de verre où l’estimation est
réalisée 114
IV.22. Laser mobile, avec deux vitesses et angle incident du laser. 115 IV.23. Milieu hétérogène : lame de verre et nanocomposites EG (a)
IV.24. , Position 1, laser immobile. 116 IV.25. , Position 2, laser immobile. 117 IV.26. , Position 3, laser immobile. 118
IV.27. , Laser mobile 1. 120
IV.28. , Laser mobile 2. 121
IV.29. , laser mobile 3. 122
IV.30. , laser mobile (lame de verre et EG). 124
LISTE DES TABLEAUX
I.1 Donées d’étalinnage 13
II.1. Rayon des billes utilisées, et nombre de pixels 27 II.2. Temps caractéristiques estimés, coefficients d’échange,
nombre de Nusselt et nombre de Biot, pour les billes de 5 et 11 mm (mobile et immobile, 1 seule bille), et les billes de 8 mm
mobiles (5 billes) 46
III.1. Valeurs calculées de . 74
III.2. Valeurs estimées de a∗ et Pe. 78
III.3. Valeurs des propriétés thermo-physiques du matériau. 80
IV.1. Moyenne sur l’estimation immobile. 119
IV.2. Moyenne sur l’estimation mobile. 123
1
Introduction générale
Ce travail s’inscrit dans le cadre du développement du laboratoire de thermographie infrarouge au sein du centre RAPSODEE (Centre de Recherche d'Albi en génie des Procédés des Solides Divisés, de l'Energie et de l'Environnement) de l’école des Mines d’Albi Carmaux.
Pour le centre RAPSODEE, le développement des nouvelles techniques de mesure de propriétés thermophysiques est indispensable pour déterminer des lois de comportement de solides, nanofluides, nanocomposites ou des solides divisés, etc… dans les procédés de traitement thermique. La modélisation des transferts thermiques, est un préalable à l’estimation fine des energies et propriétés thermophysiques couplées aux cinétiques de transformation.
La thermographie infrarouge fournit de nombreuses possibilités de caractérisation de propriétés thermiques de façon non-intrusive, à partir du rayonnement émis par le système étudié. Ainsi, la capacité d’émission du système est un facteur important dans la thermographie.
Dans le contexte du développement du laboratoire, chercher de nouvelles applications de cartographie thermique, est un objectif fixé dans cette thèse, et nous avons trois applications différentes qui sont liées par la quantification de paramètres thermiques, dans l’espace et le temps.
Introduction générale
2
Le développement du laboratoire et les applications se décomposent ainsi :
Chapitre 1 : Les données fournies par la caméra infrarouge sont le résultat d’une chaîne de phénomènes physiques et électroniques. Dans ce chapitre nous présentons un aperçu de la chaîne et des paramètres influençant la mesure thermographique. Nous présentons l’étalonnage de la camera et abordons les problèmes de résolution spatiale.
Chapitre 2 : Ce chapitre est consacré a une application en milieu granulaire. Le suivi automatique de billes mobiles est présenté au début du chapitre, puis nous montrons ensuite que la technique de traitement d’images permet de repérer la trajectoire et la vitesse des billes dans l’espace, pour ensuite estimer certains paramètres de transferts caractéristiques du mouvement des billes dans le temps.
Chapitre 3 : Ce chapitre présente une application pour un fluide en écoulement dans un microcanal. L’étude montre que l’interaction entre la puce microfluidique et le fluide varie en fonction du débit. La comparaison d’un fluide neutre avec un nanofluide permet la caractérisation relative du comportement thermique de ce dernier. Chapitre 4 : Ce chapitre présente une application à la cartographie
3
faite avec une source de chaleur mobile, appliquée sur la face avant de l’échantillon. La méthode développée est encourageante car elle montre la possibilité de faire l’estimation de diffusivité thermique de matériaux difficilement caractérisables thermiquement par les techniques conventionnelles.
5
CHAPITRE 1.
Camera Infrarouge :
une chaîne de mesures
thermiques indirectes.
Le nom INFRAROUGE, signifie “en deçà du rouge”, (du latin infra : “plus bas ”), car l'infrarouge est une onde électromagnétique de fréquence inférieure à celle de la lumière, la longueur d'onde de l'infrarouge est comprise entre 780 et 1 000 000 (nm). L'infrarouge est subdivisé en :
IR proche de 0,78 à 1,4 (µm) IR moyen de 1,4 à 3 (µm) IR lointain de 3 à 1 000 (µm)
Cette classification n'est cependant pas universelle : les frontières varient d'un domaine de compétence à l'autre sans que l'on ne puisse donner raison à qui que ce soit. Le découpage peut être lié à la longueur d'onde des émetteurs, des récepteurs, ou encore aux bandes de transmission atmosphérique. L'infrarouge est associé à la chaleur car, à température ambiante ordinaire, les objets émettent spontanément des radiations dans le domaine infrarouge, la relation est modélisée par la loi du rayonnement du corps noir dite aussi loi de Planck. La longueur d'onde du maximum d'émission d'un corps noir porté à une température absolue T (en kelvin) est donnée par la relation 2898/T connue sous le nom de loi du déplacement de Wien [1].
Dans ce chapitre nous réalisons une brève description du rayonnement émis par un objet, une petite analyse de l’influence de l’environnement sur la mesure, une présentation des détecteurs infrarouge, et nous présentons les problèmes liés à l’étalonnage.
CHAPITRE I : Camera Infrarouge un chaîne des mesures thermiques indirectes
6
1.1 Différents types de capteurs
De tels composants ont pour fonction de fournir un « signal électrique », appelé thermosignal, proportionnel au flux rayonnant issu de la scène thermique (objet). On distingue les détecteurs thermiques et les détecteurs quantiques ; ils se différencient par le fait que, dans le premier cas, le signal est fonction de la température propre du détecteur, avec une variation de l'une de ses propriétés physiques, alors que dans le second il est proportionnel au nombre de photons captés. On conçoit que les premiers aient une constante de temps supérieure à la second. Ajoutons enfin que les détecteurs quantiques doivent être refroidis à une température très inférieure à la température ambiante afin de réduire leur bruit thermique.
Il n'est pas utile de donner une liste exhaustive de ces détecteurs. Nous retiendrons que les détecteurs thermiques sont sensibles sur une large bande de longueurs d'onde, conformément aux phénomènes thermiques mis en jeu, alors que les détecteurs quantiques présentent un domaine spectral de sensibilité réduit.
Parmi les détecteurs thermiques, on peut citer :
— les bolomètres, dont la conductivité électrique évolue avec la température, — les détecteurs pyroélectriques, dont le principe de fonctionnement repose sur la variation de la charge électrique à la surface d'un matériau cristallin sous l'effet de la température,
— les thermopiles, qui mettent en jeu l'effet Seebeck, conjugaison des effets Thomson et Peltier, caractérisés par la force électromotrice développée dans un circuit fermé composé de deux métaux dont les jonctions sont portées à des températures différentes.
7
Parmi les détecteurs quantiques on distingue :
— les détecteurs photoémissifs constitués d'un solide soumis à une polarisation statique permettant l'arrachage d'électrons sous l'effet de photons incidents,
— les photoconducteurs dont la conductivité électrique varie du fait de la création d'électrons semi-libres, par absorption d'un rayonnement incident,
— les détecteurs photovoltaïques pour lesquels on observe la modification d'une barrière de potentiel de jonction correspondant à l'évolution d'un champ électrique interne ; les électrons ou les trous, créés par absorption du rayonnement, migrent alors à travers cette jonction [2].
1.2 La chaîne radiométrique
La chaîne radiométrique est l’ensemble des phénomènes qui se produisent depuis l’émission par la source de rayonnement, jusqu’à l’absorption par le récepteur.
Les sources de rayonnement sont les composants de la chaine radiométrique qui produisent du rayonnement à partir d’une autre forme d’énergie.
Les récepteurs de rayonnement, ou détecteurs sont les composants capables de transformer le rayonnement reçu en autre forme d’énergie [1].
CHAPITRE I : Camera Infrarouge un chaîne des mesures thermiques indirectes
8
Figure I.1. La chaîne radiométrique.
La source de rayonnement émet un flux reçu par le récepteur, atténué par l’atmosphère, mais aussi influencé par les réflexions de l’environnement sur la source. Une partie de ce flux est également associée a l’optique même de la caméra et a sa capacité de transformer le flux en signal électrique.
A chaque instant, chaque pixel de la matrice du détecteur délivre un signal SD (charge électrique) qui est une fonction linéaire du flux photonique reçu pendant le temps d’intégration (une fraction de la période d’acquisition des images). Si on suppose que la matrice est monochromatique autour de la longueur d’onde moyenne, on peut raisonner en luminance L et on a donc :
S = s L + S (I. 1)
Ce signal est numérisé sur 14 bits (16000 niveaux), d’autant plus grand que le flux photonique sera élevé. Le niveau numérique DL, avec SD= m DL (où m est le niveau de numérisation en charge) sera:
DL = s
m L + D L (I. 2. ) Où DL0 = S0 / m prend en compte de façon linéarisée, le rayonnement de la cavité du boîtier à température Tb dans laquelle est inséré le détecteur:
DL = M T + C (I. 3) Avec:
9
C constante correspondant au décalage de l’offset de la caméra lors de la conversion analogique numérique.
Lorsque l’on place la caméra devant un corps noir à température T (K), de luminance monochromatique vérifiant la loi de Planck, c'est-à-dire proportionnelle à e-B/T, l’équation (I.2.) s’écrit :
DL = DL∗(T) + K T + C (I. 4. )
Avec DL∗(T) = A e où A et B sont des constantes qui dépendent de la
sensibilité s du détecteur et enfin du temps d’intégration du capteur [8].
La caméra utilisée dans le cadre de cette étude est une caméra matricielle CEDIP titanium HD 560M (Pelican), avec un détecteur photovoltaïque InSb, de 640x512 pixels avec une bande spectrale de 1.5-5 µm (IR moyen) et un pas de 15µm. Le détecteur assure la transformation du flux incident en tension, avec un temps d’intégration variable, les valeurs de tension sont en suite transformées en température grâce à des courbes d’étalonnage, figure (I.2).
Figure I.2. Chaine d’acquisition de donnes [3].
Le problème consiste à trouver la valeur du temps d’intégration qui permet l’observation d’une source thermique variable, sans saturer la caméra (figure I.3.) et avoir la plus grande sensibilité possible (pour utiliser le maximum de l’échelle de 14 bits de numérisation).
CHAPITRE I : Camera Infrarouge un chaîne des mesures thermiques indirectes
10
Figure I.3. Sensibilité s dépendant du temps d’intégration.
Comme observation supplémentaire nous savons que la relation DL/température n’est pas linéaire. CEDIP a développé une procédure appelée CNUC, pour l’optimalisation de la sensibilité en fonction du temps d’intégration [4].
1.3 Procédure NUC, CNUC et NETD
Sur les caméras, chaque pixel est considéré comme un capteur indépendant. Une correction d’uniformité est alors nécessaire (NUC), qui consiste basiquement à ramener chaque réponse d’un détecteur sur la courbe moyenne de l’ensemble de la matrice, ou les valeurs numériques ont leur équivalent en flux de chaleur. On obtient ainsi une seule courbe d’étalonnage pour tous les pixels.
11
Figure I.4. Exemple de 3 pixels, Niveau numérique de sortie en fonction du flux incident.
Pour chaque pixel (i,j) il faut trouver une paire de coefficients ij et ij [4], tels que :
= + = + ( . 5)
Avec une hypothèse de linéarité et que ij et ij ne sont pas intrinsèques, ij et ij sont déterminés pour un temps d’intégration donné et une plage de températures fixe. CEDIP propose également la procédure CNUC qui consiste en l’utilisation de différente ij et ij dans le même registre, fait par la caméra et comme pour chaque ij et ij il y a une courbe d’étalonnage nous travaillons à différente sensibilité. Nous avons fait le choix de réaliser nos propres étalonnages et de travailler avec la NUC, ce qui permet un meilleur contrôle des mesures. La procédure d’étalonnage a été faite avec un corps noir étendu (Model SR-800-UD de CI Systems (-25 a 100 (°C))), ou la température en DL est associée à une valeur de température en °C.
Le montage pour faire l’étalonnage consiste à placer la caméra en face de la source du corps noir, avec une légère défocalisation pour réaliser la procédure d’étalonnage. L’étalonnage est répété pour différentes valeurs du temps d’intégration: un temps d’intégration de 200µs pour les évènements de courte durée et de 1000µs pour des signaux plus lents.
CHAPITRE I : Camera Infrarouge un chaîne des mesures thermiques indirectes
12
Figure I.5. Montage d’étalonnage de la caméra IR.
Les résultats de ce type d’étalonnage (figure I.6) montrent le niveau numérique DL moyen des images en fonction de la température de consigne du corps noir TCN, ainsi que le signal numérique de sortie obtenu pour le flux incident LY sur le détecteur.
13 2000 3000 4000 5000 6000 7000 8000 9000 10000 10 20 30 40 50 60
Courbe d'etalonage pour un TI de 200 et 1000 µs
200 (µs) 1000 (µs) Température (DL) Te m pé ra tu re (° C ) 10 20 30 40 50 60 Te m pé ra tu re (° C ) 0,016 0,018 0,020 0,022 0,024 0,026 0,028 0,030 2000 4000 6000 8000 10000
Flux de Chaleur,50 mm TI-200 et 1000 (µs)
Te m pé ra tu re (D L) Flux (W/cm²) TI - 200 (µs) TI -1000 (µs)
Figure I.7. Courbe d’étalonnage et flux de chaleur incident sur la caméra IR. Température Caméra (DL) Température corps noir (°C) 3560 15 3971 20 4441 25 4976 30 5583 35 6267 40 7035 45 7896 50 8854 55 9930 60
Tableau I.1. Données d’étalonnage.
A partir de la loi de Planck., les valeurs du flux LY, sont calculées par ( , )
=2 ℎ ²
Où: ℎ = 6.6256x10-34 (W s²), constante de Planck. = 1.38054 x 10-23 (J/K) ; constante de Boltzmann. c= 2.998 x 108 (m/s) ; célérité de la lumière.
CHAPITRE I : Camera Infrarouge un chaîne des mesures thermiques indirectes
14 =Température de corps noir.
Et comme la bande spectrale de la camera est 1.5-5 µm, nous avons :
= ∙ 2 ℎ ²
.
Où ∙est l’émissivité du corps noir étendu, donnée par le constructeur à 0.97.
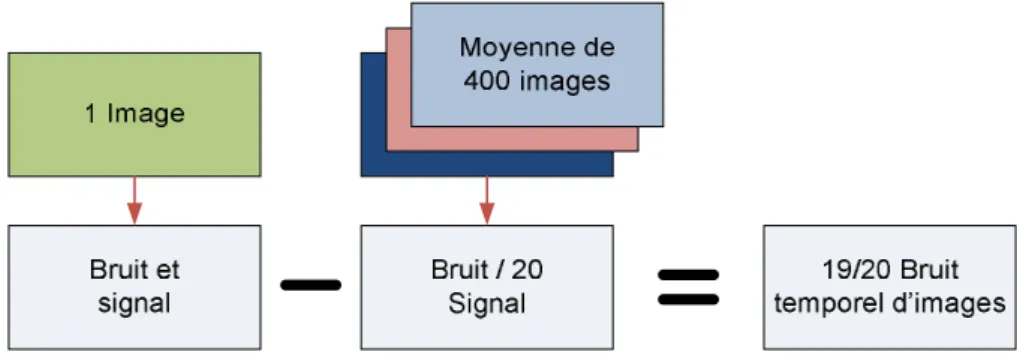
Pour savoir quel temps d’intégration il faudra choisir, nous réalisons la mesure de la NETD du système (Noise equivalent température difference) qui permet de déterminer le rapport bruit-signal de la caméra. Cette valeur a la caractéristique d’être plus petite quand la température ou le temps d’intégration augmentent. La NETD permet de savoir quel est le minimum d’écart de température nécessaire pour obtenir un signal de sortie supérieur au niveau de bruit de la caméra. Pour déterminer la NETD, nous utilisons, la méthode suivante, schématisée sur la Fig. I.8.
Figure I.8. Procédure pour obtenir la valeur de NETD.
Si nous soustrayons la moyenne de 400 images avec une seule image nous avons 19/20 du bruit temporel par pixel, et si nous en prenons la moyenne pour les 640x512 pixels, nous obtenons une valeur représentative de la NETD, au temps d’intégration et température choisis. Ce calcul a été fait pour les deux temps d’intégration 200 et 1000 (µs), à différentes températures. Pour chaque pixel nous avons également calculé l’écart type correspondant à l’évolution
15
temporelle des 400 images. Les résultats sont montrés avec l’écart type moyen de tous les pixels.
10 20 30 40 50 60 0,00 0,01 0,02 0,03 0,04
NETD sur 400 images, 50mm et corps noire étendue.( TI de 200s et 1000s )
N ET D (° C ) Température (°C) 200 (s) 1000 (s) 10 20 30 40 50 60 0,03 0,06 0,09 0,12 0,15
STD sur 400 images, 50mm et corps noire étendue.( TI de 200s et 1000s )
S TD ( °C ) Température (°C) 200 (s) 1000 (s)
Figure I.9. NETD et STD, pour un temps d’intégration (TI) de 200 et 1000 (µs).
Les valeurs montrent que pour un temps d’intégration donné, même à 200 µs, on retrouve bien une NETD inferieure à la NETD de 20 mK donnée par le constructeur. En dessous de 25 °C et pour un TI de 200 µs, la valeur est le double. Pour un TI de 1000 µs, la STD est assez constante avec la température, par contre avec une TI de 200 µs, le rapport STD devient très faible en dessous de 40 °C, et on retrouve un STD qui augmente fortement lorsque la température approche de la température ambiante.
Une fois que nous avons terminé l’étalonnage il est possible de visualiser ij et ij, à partir de la NUC faite par le logiciel fourni par CEDIP. La distribution de ces deux valeurs a une relation très directe avec l’optique utilisée avec la caméra IR. La figure I.10. montre la distribution de ces deux paramètres.
CHAPITRE I : Camera Infrarouge un chaîne des mesures thermiques indirectes
16
Figure I.10. Valeurs de ij et ij.
La distribution de , montre que le flux converge sur le détecteur depuis l’optique, le cercle de distribution reflète ce phénomène. Les valeurs du paramètre sont plus liées à la température d’étalonnage et au temps d’intégration utilisé, et présentent une uniformité plus importante sauf sur les bords du détecteur.
1.4 Résolution spatiale
Les rapports sur cet aspect de la caméra sont nombreux [6]. En fait l’étude de la résolution spatiale, donne une idée sur la mesure d’objet plus petit qu’on peut regarder avec la caméra et aussi permettre de faire certaines corrections sur la mesure effectuée avec la caméra [7]. Les problèmes associés à cette question sont de façon générale les suivants (figure I.11.):
- Interaction entre pixels voisins (isolation électrique). - Diffraction et aberrations optiques.
- Uniformité et qualité de la matrice.
17
Figure I.11. Exemple des erreurs sur la construction d’une image. Aujourd’hui on sait que les problèmes liés à l’isolation électrique sur la caméra titanium ne sont pas trop importants, par rapport a l’uniformité de la matrice. Certains chercheurs font un étalonnage par pixel, pour avoir des mesures plus correctes, mais cette méthode nécessite des temps de calcul importants et n’améliore pas forcément la qualité du signal, parce qu’elle ne prend pas en compte les autres facteurs mentionnés. En fait, il faut essayer de trouver la fonction de transfert associée à la caméra infrarouge [6], qu’on peut écrire de la manière suivante :
= ℎ( ) ∗ é + ( . 6)
Dans l’équation (I.6) l’image caméra est un produit de convolution entre l’image réelle et la fonction de transfert (h) de la caméra. En fait dans ce type de traitement, la fonction de transfert peut aussi prendre en compte les effets de transmission atmosphérique, la corrélation spatiale entre pixels et l’aberration optique de la caméra, comme le problème d’étalonnage. Pour résoudre cette équation on peut utiliser la deconvolution aveugle, par exemple celle proposée dans [9]. Cependant, pour retrouver la fonction de transfert (h), un montage de laboratoire assez complexe est nécessaire. Pour le moment on considère que les images fournies par la caméra sont représentatives de la réalité, et que la propagation de bruit et lissage dans la mesure réalisée sont propagés dans les post-traitements.
CHAPITRE I : Camera Infrarouge un chaîne des mesures thermiques indirectes
18
1.5 Conclusion
Notre camera Titanium, est très performante, nous avons une sensibilité de 0.020 mK, donnée par la valeur NETD. Cette caméra est une des toutes premières des séries équipées avec le détecteur 612 x 540 pixels, et comme tous les nouveaux modèles, de nombreux problèmes, ont été détectés.
Après la mise à jour de notre caméra et l’arrivée du corps noir, nous avons fait nos propres opérations d’étalonnage, qui se sont avérées plus fiables que la CNUC proposée par le constructeur. La détermination des valeurs de NETD en laboratoire fournit des valeurs de référence meilleures que la valeur de référence donnée par CEDIP. En ce qui concerne la résolution spatiale, nous ne disposons pas d’une mire qui permettrait de quantifier la résolution apparente de l’objectif de 50 mm.
Dans tous les montages expérimentaux présentés dans ce mémoire, la caméra est placée à proximité de la zone de mesure, et on peut négliger les problèmes d’atténuation atmosphérique. Pour éviter les problèmes de réflexion et d’émission sur l’échantillon, nous avons utilisé de la peinture noire d’émissivité contrôlée.
19
CHAPITRE 2.
Suivi d’Objets à Partir d’Images Infrarouge.
Application aux Milieux Granulaires
Pour caractériser un système granulaire dynamique il est nécessaire de comprendre les interactions entre les grains telles que la cohésion et la ségrégation [10,11]. Pour cela les chercheurs ont développé différents types d’analyse, notamment les techniques de corrélation d’images [12] pour déterminer les champs de vitesses au sein du milieu. Dans le cas d’un milieu fluide considéré comme continu, on peut utiliser les techniques de PIV [13,14]. Mais cette méthode est un procédé statistique très utilisé dans les systèmes où les grains sont d’un diamètre petit [15], et nécessite un montage optique complexe intégrant une nappe laser. Pour les milieux granulaires il est intéressant de visualiser la distribution du mélange formé dans un système fermé [16]. Dans le cas des lits vibrés, les grains ne sont pas capables de produire de la chaleur par frottement [17], mais pour un groupe de grains de propriétés physiques et géométriques connues, un désiquilibre thermique permet un suivi de la conduction de la chaleur au sein du milieu [18]. Une caméra CCD est utilisée lorsque les grains ont la même couleur. Dans le cas contraire la caméra IR permet en présence d’un déséquilibre thermique de distinguer des grains non détectables dans le visible [19]. Dans ce cas on voit ici une approximation pour trouver la position des grains en fonction du temps (la température, la position et la vitesse). Déjà il existe la µPIV-thermique, qui consiste à trouver la position en fonction du temps d’une source ou d’un objet avec une température très élevée en comparaison a celle du fond [20]. Cette technique permet de trouver un objet de un pixel et quelques voisins sur une image thermique. L’objectif de notre étude est de trouver les grains sur l’image (centaine de pixel).
Chapitre II :Suivi des Objets à Partir des Images Infrarouge.
20
Dans un premier temps, on choisit des billes en acier que l’on place dans un récipient vibrant, qui permet de générer un mouvement aléatoire [21,22]. Diverses techniques de détection de contour et reconnaissance d’objets sont adaptées au traitement d’images infrarouges. Comme méthode de suivi nous utilisons les techniques de corrélation des images [23,24], la transformée de Hough [25] et les outils de morphologie mathématique [26,27]. Nous montrons que ces derniers sont les plus efficaces et robustes pour déterminer la position dans le temps des objets mobiles de façon automatisée, puis ainsi retrouver le champ de température de chaque objet dans son propre repère mobile.
La thermique d’un milieu granulaire, n’est pas beaucoup développée, et nous trouvons dans la littérature principalement des études sur les milieux granulaires en compression [28,29]. Dans ce contexte l’analyse par pixel est intéressante comme nous verrons dans les chapitres suivants. On fait l’hypothèse que chaque bille est un objet unique qui n’est pas en contact direct et permanent avec les autres objets autour de lui.
2.1 Méthodologie du Travail
Dans un premier temps, on considère l’étude dans un milieu granulaire parfait, en utilisant des billes d’acier de différents diamètres. Les billes sont placées sur un plateau oscillant par l’intermédiaire d’un piston fixé sur une membrane oscillante. La fréquence utilisée dépend de la quantité de billes utilisées, qui est directement proportionnelle à la place sur la membrane, pour ne pas avoir d’effet de résonance qui ferait sortir les billes du récipient. La fréquence et l’amplitude d’oscillations ont été choisies avec l’objectif de ne pas avoir de billes restant collées à la paroi ou qui sont projetées en dehors du plateau. Nous cherchons à avoir un mouvement aléatoire, et les paramètres sont fixés selon les cas de manière très empirique. Une fois que nous avons enregistré différentes séquences d’images, nous sélectionnons une séquence où les billes restent peu en contact, pour l’analyse par les trois méthodes développées (corrélation,
21
transformée de Hough et morphologie mathématique). Une seconde série d’essais se fait avec des billes de même diamètre, mais à différentes températures initiales. Enfin, la troisième expérience, se fait avec une seule bille de bois, afin de tester un cas plus sévère.
2.2 Montage expérimental
Pour faire cette étude, nous utilisons des billes en acier de différents diamètres (15, 11 ,8 ,7 et 5 mm), peintes en noir pour atténuer les effets optiques et améliorer le rapport signal-bruit. Pour avoir un mouvement aléatoire dans une région finie, les billes sont excitées au moyen d’un plateau vibrant suivant son axe vertical. Cette plaque a aussi des parois élastiques, avec l’objectif de faire rebondir les billes sur les parois. Le tapis sur lequel se déplacent les billes est constitué d’un matériau isolant.
Chapitre II :Suivi des Objets à Partir des Images Infrarouge.
22
Le montage a été conçu à l’école, le système d’excitation mécanique consiste en un Haut-parleur modifié, connecté sur l’amplificateur Kepco BOP 50-2M excité par un générateur de fonction Agilent 33220.
2.3 Méthode de la corrélation croisée.
Cette méthode est là plus utilisée dans la technique PIV. Elle estime la grandeur de déplacements relatifs des objets à partir de deux images successives, ce qui permet d’obtenir un champ de vitesses associé à chaque doublet. On risque cependant d’avoir une information fausse, par l’accumulation des erreurs sur les positions. La corrélation croisée pour deux images binaires,
de dimension (L,N), prises entre deux instants s’écrit comme:
( , ) = ,( + , + ) ∙ , ∆ ( , )
Où IC est l’image de corrélation avec une dimension de (2∙L-1,2∙N-1). Le déplacement relatif de la bille entre les deux images est équivalent à la distance, entre le maximum de corrélation et le centre géométrique de l’image.
(a) (b)
Figure II.2. l’image (a) Image thermique (b) Auto-corrélation de l’image (a), méthode matricielle. Image initiale t (°C) 0 300 600 0 150 300 40 43 46 Auto-corrélation Matricielle 0 600 1200 0 300 600 500 3000 5000
23
La figure II.2.(b). est le résultat de l’auto corrélation de l’image II.2.(a). Elle ne donne pas la position de la bille sur la figure II.2.(a), puisque pour l’auto-corrélation le déplacement est zéro.
Une autre méthode de calcul de corrélation consiste en l’utilisation de la FFT, cette méthode est appliquée directement sur les images avec un résultat plus rapide par rapport a la méthode décrite précédemment. Cette méthode est résumée dans la figure II.3.
Figure II.3. Corrélation croisée avec FFT et IFFT.
(a) (b)
Figure II.4. (b) Auto-corrélation de l’image (a), avec l’aide de FFT et IFFT. La figure II.4 présente le résultat de cette corrélation, où la figure II.4(b) est l’auto-corrélation de l’image II.4(a). Selon le quadrant que la bille utilise sur la figure II.4(a), le déplacement sera entre, le sommet du même quadrant et le maximum de corrélation de l’image II.4(b). Comme exemple la figure II.5 montre le déplacement calculé grâce a la corrélation croisée, d’une bille entre la position de la figure II.5(a) et la figure II.5(b).
Image t FFT Corrélation croisée
F(t) x F (t+dt)
IFFT Détection de pic de la corrélation croisée Conversion a Position de la bille Image t +dt FFT F(t) F(t+dt) Image final t+dt (°C) 0 300 600 0 150 300 40 43 46 Auto-corrélation FFT 0 300 600 0 150 300 3.0535 3.0543 3.055 x 108
Chapitre II :Suivi des Objets à Partir des Images Infrarouge.
24
(a) (b)
(c) (d)
Figure II.5. (c) Corrélation de (a) et (b) (FFT), (d) Corrélation de (a) et (b) (Matricielle).
Pour une séquence de 20 images, nous avons une accumulation d’erreurs sur les déplacements calculés pour chaque paire d’image, et en conséquence la position de la bille n’est pas déterminée avec précision. La figure II.6 montre tous les déplacements calculés.
Figure II.6. Résultat de la corrélation à deux images pour une séquence de 20 images consécutives.
Cette méthode ne permet pas de connaitre la position du mobile avec précision, même pour un seul mobile. De plus le temps de calcul est très grand (>100(s)/position) (Plus de détailles, sur l’annexe A).
Image initiale t (°C) 0 300 600 0 150 300 40 43 46 Image final t+dt (°C) 0 300 600 0 150 300 40 43 46 Corrélation FFT(t et t+dt) 0 300 600 0 150 300 3.0535 3.0543 x 108 Corrélation matricielle (t et t+dt) 0 600 1200 0 300 600 500 3000 5000
Déviation de la trajectoire (grises)
0 300 600 0 150 300 40 43 46
25
2.4 Transformée généralisée de Hough.
La transformée de Hough permet de détecter les centres de gravités des objets dans une image. L’idée générale est que le barycentre est l’intersection d’un grand nombre de droites normales aux différents éléments de contour de l’objet considéré. On choisit un point de référence dans l’objet a détecter, que l’on l’appelle (xref,yref), comme sur la figure II.7 .
Figure II.7. Description géométrique de la transformée de Hough.
Si on suit le périmètre de notre objet (xi,yi), on peut former un tableau avec la distance entre le bord et le point de référence (r), l’angle de position () et l’angle d’orientation (+90.). Pour chaque valeurs de (+90.) sur le tableau, le correspondant r et sont injectés dans les équations, comme :
= + × cos( + )
= + × cos( + ) Comme retour nous avons et (xref,yref). Le résultat de cette méthode est une matrice d’accumulation, où on retrouve les coordonnées de l’objet et son orientation ( et (xref,yref) plus fréquente). Pour trouver le périmètre des billes dans l’image, nous pouvons utiliser une méthode de détection de contour comme la méthode de Prewitt, Sobel, Laplacian-Gauss ou Canny (voir annexe A). Sur la figure II.8, nous avons un schéma de calcul conçu pour trouver la position des billes sur un image.
Chapitre II :Suivi des Objets à Partir des Images Infrarouge.
26
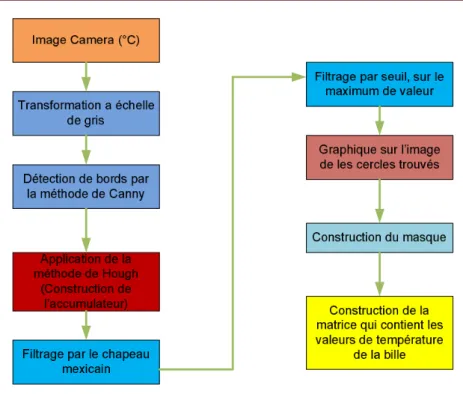
Figure II.8. Protocole de calcul de la position des billes, méthode de Hough. Sur la figure II.9 nous avons le résultat de l’application de cette méthode, avec une bille de diamètre a.
(a) (b)
(c) (d)
Figure II.9. Résultat obtenus par la méthode de Hough. A) image réelle de température; b) Détection de contour (Canny); c) Accumulateur ;
d) Accumulateur filtré par un « chapeau mexicain »
Image Initial (échelle de grise)
0 300 600
0
150
300 0
0.5
1 Les bords trouve par M. Canny
0 300 600 0 150 300 0 0.5 1 Accumulateur 0 300 600 0 150 300 10 60
120 Accumulateur filtre (Cha. Mex.)
0 300 600 0 150 300 -200 400 1000
27
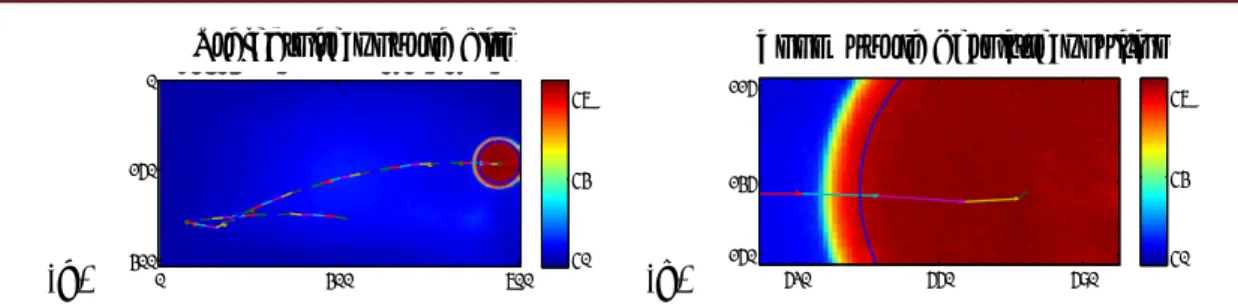
Cette méthode est précise lorsque le contraste entre la bille et le fond est élevé. Dans le cas contraire les erreurs dûes au bruit dans l’image sont interprétées comme partie du périmètre. La mise en oeuvre de cette méthode avec Matlab est présentée en annexe. Comme exemple, la figure II.10 montre un cercle tracé, à partir de (xref,yref) calculé, et qui correspond à la position de la bille sur la figure, pour un seuil de filtrage de 80 %.
Figure II.10. Exemple, méthode de Hough.
Dans ce qui suit on s’intéresse à la méthode avec une séquence d’images, avec des billes de différents diamètres : 5 billes de 15, 7 et 5 mm et deux de 8 mm de diamètre. Les images sont de 512x640 pixels ( 8 (cm) x10 (cm)), équivalent à tout le champ d’observation.
Les diamètres en pixel pour les billes sont présentés dans le tableau II.1.
Diamètre (mm) Rayon (pixels)
11 45
8 33
7 29
5 21
Tableau II.1. Rayon des billes utilisées, et nombre de pixels
Pour chaque rayon, on fait la recherche avec cette méthode et nous utilisons un seuil de 80% sur l’accumulateur avec une taille de pixel de l’ordre de 240 µm. Les résultats sont présentés sur la figure II.11.
Bille trouve(°C) (seuil 80%)
0 300 600 0 150 300 40 43 46
Chapitre II :Suivi des Objets à Partir des Images Infrarouge.
28
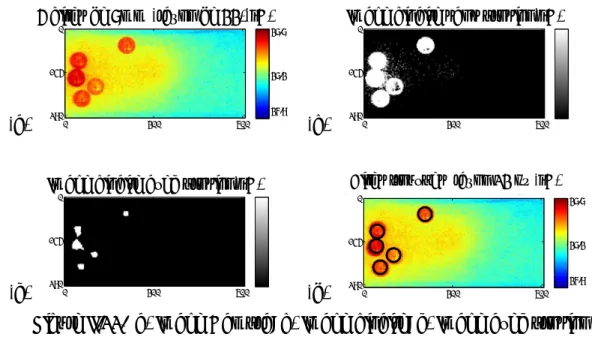
Figure II.11. Résultats d’estimation des positions avec la méthode de Hough. A priori, les résultats sont différents pour chaque diamètre, bien que le programme de calcul est le même pour tous les rayons. Comme première analyse nous pouvons dire :
1. On a trouvé avec cette méthode et sans erreur, les billes de 15 et 7 mm. 2. On détecte trois billes de 8 mm au lieu de deux. Il y a donc un faux positif.
Si la différence entre les rayons est petite, cette méthode peut facilement induire une confusion entre les billes
3. Pour les billes de 5 et 7 mm, cette méthode a trouvé des billes fantôme, comme conséquence du bruit sur l’image de contour de Canny, comme aussi des filtres utilisé sur l’accumulateur. La figure II.12 (pour un seuil de H=85 %) montre que le changement du seuil peut filtrer les billes fantôme. Mais le choix du seuil doit être fait pour chaque image de la séquence, ce qui rend difficile le développement d’un protocole automatique.
Rayon = 45, H=80% 0 200 400 640 0 170 340 512 48 52 55 Rayon = 33, H=80% 0 200 400 640 0 170 340 512 48 52 55 Rayon = 29, H=80% 0 200 400 640 0 170 340 512 48 52 55 Rayon = 21, H=80% 0 200 400 640 0 170 340 512 48 52 55
29
Figure II.12. Effet d’un changement de seuil de filtrage.
Dans la section suivante nous utilisons une méthode plus robuste pour trouver la position des billes et les identifier. Cette méthode n’est pas sans erreur, mais est beaucoup plus robuste pour la description des mouvements de billes.
2.5 Utilisation de la morphologie mathématique avec l’objectif
de caractériser un système dynamique de billes, avec une
caméra infrarouge.
Le principe de la morphologie mathématique consiste à comparer une forme ou une structure inconnue à un ensemble de formes connues appelées éléments structurants à l'aide de relations booléennes telles l'intersection ou l'inclusion [27]. Il s’agit de comparer les objets a un autre objet de forme connue B (élément structurant) à l'aide de transformations dont les résultats sont de nouvelles images. Cette approche permet de mettre en évidence des objets de forme connue, de déterminer les caractéristiques géométriques ou topologiques d'un objet ou de mesurer la dispersion des objets. Ce modèle est applicable aux images quelconques que l'on considère comme des ensembles constitués de pixels connexes noirs ou blancs pour les images binaires ou de pixels dont la valeur d'intensité est supérieure ou inférieure à un certain seuil pour les images à niveaux de gris ou couleurs. L'approche ensembliste est indépendante de la nature même des images car le cadre mathématique permet de traiter toutes les
Rayon = 21, H=80% 0 200 400 640 0 170 340 512 48 52 55 Rayon = 21, H=85%
Chapitre II :Suivi des Objets à Partir des Images Infrarouge.
30
formes de données. En revanche, le choix des ensembles et des transformations à appliquer dépend uniquement de l'application. Cette démarche obéit à la même logique qui consiste à tout abord isoler dans l'image, les objets à étudier du fond. Traditionnellement, on représente les objets à analyser par les ensembles de pixels connexes noirs ou dont la valeur est inférieure à un niveau d'intensité donné, les autres parties de l’image représentant l'arrière-plan qui sera ignoré lors de l'analyse. C'est à cause de cette structuration de l'image en ensembles, que l'on observe un dédoublement des opérateurs morphologiques suivant qu'on les applique sur le fond ou les formes. Ainsi l’opérateur fondamental d'érosion correspond à celui de la dilatation sur les ensembles complémentaires.
La morphologie mathématique étant basée sur une construction ensembliste, nous rappelons les principales opérations sur les ensembles qui sont toutes définies à partir de l’union et de l'intersection. Ces définitions étant formulées pour les espaces continus, nous verrons plus tard comment ce formalisme mathématique peut s'appliquer aux images discrètes.
Les opérations ensemblistes fondamentales sont au nombre de cinq : - l'union :A B={xA ou xB}, - l'intersection : A B = { xA et x B } , - le complémentaire : Ac = { x A } , - la différence : A -B = ABc = { xA et xB } , - la différence symétrique : AB = ( AB ) - ( AB ) = ( A - B )( B - A )
Et les propriétés des opérations ensemblistes sont :
- commutativité : AB=BA ; AB= BA
- associativité : (AB)C=(AB)C ; (AB )C = ( AB )C
- distributivité : (AB)C=(AC)( B C) ; (AB)C=(AC)(BC)
Enfin on retrouve le principe de dualité entre l'union et l'intersection sur l'ensemble complémentaire :
31
Les opérations morphologiques sur les ensembles sont - Dilatation et érosion avec un élément structurant.
- Ouverture et fermeture.
- Contours intérieurs et extérieurs. - Squelette par morphologie.
On présente dans la suite les opérations fondamentales de dilatation et érosion.
Les opérations de dilatation et d’érosion consistent à transformer un ensemble de départ A , représentant une forme isolée de l'image, en un nouvel ensemble, à partir des opérations ensemblistes d’intersection ou d'inclusion avec un ensemble B de forme connue appelé élément structurant. On définit l'ensemble Bx par le déplacement de B en chaque point x de l’espace. Soit Bs
l'ensemble B symétrique par rapport à son origine, appelé aussi transposé. On définit un élément structurant symétrique par rapport à son origine si et seulement B = Bs.
Translation de B : Bx = { x + b ,x, bB }
Symétrique de B : Bs = { - b ,bB }
Elément structurant symétrique :
B = Bs symétrique
La dilatation d'un ensemble A par un élément structurant B , noté DB
( A ) ,
est définie par l'ensemble des points x de l'espace pour lesquels Bx présente
une intersection non vide avec A :
DB( A ) = { x : ABx }
Réciproquement on définit l'érosion d'un ensemble A par un élément structurant B, note EB
( A ) , l'ensemble des points x de l'espace pour lesquels Bx
est contenu dans A :
Chapitre II :Suivi des Objets à Partir des Images Infrarouge.
32
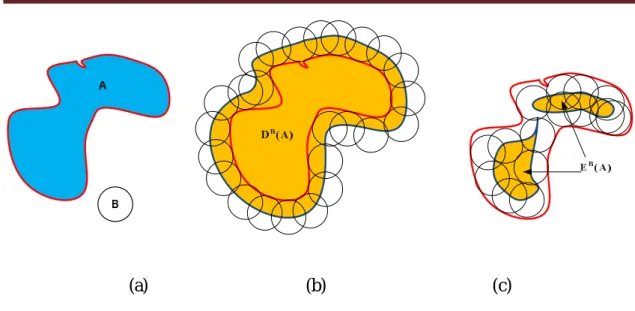
(a) (b) (c)
Figure II.13. (a) Objet A et elément structurant B (b) Dilatation de A
par B (c) érosion de A par B
Si l'élément structurant B est symétrique, la dilatation consiste donc à épaissir la forme d'origine en fonction du rayon maximal et de la forme géométrique de l'élément structurant (voir figure II.13). De plus si l'élément structurant n'est pas symétrique le résultat d'une érosion ne sera pas symétrique et la taille et la forme de l'élément structurant constituent les deux principaux paramètres d'une transformation morphologique.
Bien que les opérations de dilatation et d’érosion ne soient pas réversibles, la succession des opérations de dilatation et d’érosion permettent de définir de nouvelles opérations morphologiques telles l’ouverture et la fermeture.
L’ouverture d’un ensemble est définie par une érosion suivie d’une dilatation. La fermeture d’un ensemble est définie par une dilatation suivie d’érosion. L’ouverture est à la base de nombreux traitements morphologiques :
Suppression des ensembles d’épaisseur inférieure à la taille de l’élément structurant.
Filtrage du contour des formes en éliminant les petites convexités mais pas les concavités.
33
Division des ensembles présentant des cols étroits dont l’épaisseur est inférieure à la taille de l’élément structurant, en plusieurs connexités.
Réciproquement, la fermeture permet d’effectuer les traitements suivants : Remplissage des trous de rayon inférieur à la taille de l’élément structurant.
Filtrage des contour des formes en éliminant les petites concavités mais pas les convexités.
Réunion de plusieurs connexités faiblement espacées dont la distance minimale est inférieure à la taille de l’élément structurant.
2.5.1 Méthodologie du travail, pour un objet
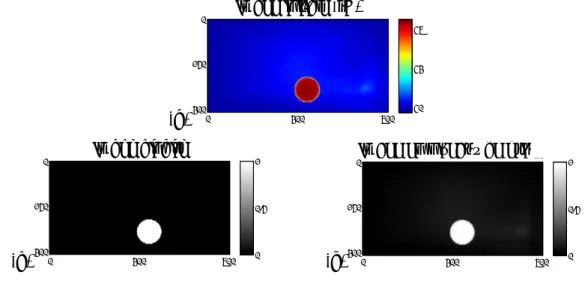
La première chose à faire est de transformer les images thermiques de température en images binaires où il est possible de faire le traitement morphologique, par une transformation en échelle de gris, suivie de l’application d’un filtrage avec un seuil variant de zéro à 1. L’échelle de gris est basée sur la distribution linaire de l’image, c'est-à-dire que la valeur plus petite de température est zéro et la plus grande est 1.
Pour trouver et identifier les billes on fait un étiquetage des objets de l’image, mais il est possible que deux billes, ou plus soient en contact. Pour les séparer, on utilise une érosion suffisamment contrôlée pour séparer les billes, sans les faire disparaitre.
Une fois que les billes sont étiquetées, nous pouvons connaitre la distribution granulométrique (avec un grand contraste et sans érosion de séparation) et la position des billes. Avec cette information nous appliquons un masque qui permet de connaitre le champs de température de chaque bille. La figure II.14 montre un schéma de calcul pour trouver la position et températures des billes.
Chapitre II :Suivi des Objets à Partir des Images Infrarouge.
34
Image Camera (°C)
Obtention de la temperature par chaque
bille Obtention de les positions des billes
Graphique sur l’image de les billes trouve
Etiquetage de les object de la image Erosion si les billes sont
en contact Transformation a échelle de gris Construction de la masque Construction de la matrice que contienne
les valeurs de température et position
des billes Transformation a une
échelle binaire
Figure II.14. Protocole pour trouver les billes, méthode morphologique. Dans ce qui suit, on présente les résultats obtenus avec le protocole conçu. La première opération est la binarisation de l’image thermique (figure II.15), à l’aide des fonctions suivantes :
Image Grise = mat2gray (Image Caméra); Image Binaire = im2bw (Image Gris, seuil );
(a)
(b) (c)
Figure II.15. a) Image Caméra, b) Image en niveaux de gris, c) Image binaire.
Image initiale (°C) 0 300 600 0 150 300 40 43 46 Image binaire 0 300 600 0 150 300 0 0.5
1 Image en niveaux de grises
0 300 600 0 150 300 0 0.5 1