Thèse
Pour l’obtention du grade deDOCTEUR DE L’UNIVERSITÉ DE POITIERS
(Diplôme national – arrêté du 7 août 2006)Ecole Doctorale : Sciences et Ingénierie pour l’Information Secteur de Recherche : Traitement du Signal et des Images
Présentée par
Xin HUANG
Extraction de Relief de Surface Texturée
Rugueuse à Comportement Photométrique
Hétérogène
Soutenue le 16 juillet 2010 devant la Commission d’Examen composéede :
Abdelaziz BENSRHAIR, Professeur, INSA de Rouen……….……...Rapporteur Ivon VOISIN, Professeur, Université de Bourgogne………...Rapporteur Laurent DAVID, Professeur, Université de Poitiers………..Examinateur Minh-Tan DO, HDR, Laboratoire Central des Ponts et Chaussées………...Examinateur Majdi KHOUDEIR, Professeur, Université de Poitiers………Directeur de thèse Benjamin BRINGIER, Maître de Conférences, Université de Poitiers…… Examinateur
Remerciements
Les travaux présentés dans ce manuscrit ont été réalisés au département SIC (Signal Image et Communications) du laboratoire Xlim.
Tout d’abord, je remercie Monsieur Majdi KHOUDEIR, qui a été mon directeur de thèse. Je le remercie également pour m’avoir toujours dirigédans la bonne direction, pour sa sympathie, son enthousiasme, son implication, ses conseils administratifs et ses encouragements tout au long de cette thèse.
Je remercie Monsieur Benjamin BRINGIER pour ses précieux conseils, son soutien, son implication au cours de cette thèse. Je remercie également Monsieur David HELBERT qui m’a recommandé de nombreux ouvrages qui m’ont été très utiles durant la première année de cette thèse.
Merci à tous les membres du laboratoire SIC pour leur attention et leur soutien. Un remerciement particulier à Philippe DUBOIS pour ses travaux concernant la préparation de la salle de manipulation et la réalisation du dispositif de système d’acquisition.
Enfin, je n’oublie pas de remercier ma famille et mes amis pour leur soutien et leurs encouragements.
Résumé
Cette thèse est consacrée à l’analyse et à l’extraction de relief de surfaces à comportement photométrique hétérogène par exploitation et développement de technique de stéréovision photométrique. Ce type de surface, généralement partiellement réfléchissante, est une surface à comportement photométrique mixte : diffuse et spéculaire. Le comportement photométrique de la surface se traduit par des modèles d’interactions lumière-matière différents. Ainsi, la reconstruction du relief de la surface par stéréovision photométrique peut être en théorie obtenue par l’exploitation de ces différents modèles. Néanmoins, la mise en oeuvre de ces modèles peut s’avérer délicate (difficulté d’inversibilité du modèle photométrique, méconnaissance des paramètres intrinsèques liés aux matériaux utilisés...). Dans ces travaux, nous présentons dans un premier temps les différents modèles utilisés en stéréovision photométrique ainsi que leurs sensibilités éventuelles aux paramètres intrinsèques des matériaux et les limites de leurs utilisations dans le cas de matériaux hétérogènes. Nous proposons ensuite deux approches différentes pour l’extraction du relief d’une surface partiellement réfléchissante. Notre première approche repose sur l’exploitation conjointe d’un modèle photométrique adapté au comportement diffus de la lumière et des principes d’optique géométrique pour déterminer le champ des gradients de la surface. Cette approche nécessitant au préalable de séparer dans l’image les zones caractérisées par un comportement spéculaire de la lumière et les zones caractérisées par un comportement diffus de la lumière. Cette approche est testée sur différents types de surfaces synthétiques et réelles et les résultats obtenus sont présentés.
En ce qui concerne notre deuxième approche, elle repose sur le fait qu’une facette ou microfacette du relief local de la surface réfléchira la lumière dans une direction déterminée dans le cas de spécularité. Ainsi, une facette spéculaire sous un angle d’éclairage donné peut ne pas l’être sous un autre angle d’éclairage. Donc nous proposons d’augmenter le nombre des images acquises afin de pouvoir ensuite en extraire un jeu minimal des images les moins spéculaires pour l’extraction de relief. La méthode que nous adoptons est donc un système de stéréovision photométrique avec six sources. Nous avons déterminé dans ce cas le champ de gradient pixel par pixel avec trois images non spéculaires parmi les six images acquises. Puis nous avons mis en oeuvre l’extraction de relief sur les images synthétiques et sur les images réelles avec chaque méthode. Nous avons évalué et comparé ensuite les résultats obtenus avec ces différentes méthodes. Les approches développées ont ensuite été appliquées pour
l’extraction de relief dans le cadre d’applications à finalité industrielle.
Mots-clés : Interaction lumière/matière, surface partiellement réfléchissante, réflexion spéculaire, extraction de relief, modèle de réflexion, stéréovision photométrique.
Abstract
This thesis analyzed the partially reflecting surface and developed the relief extraction method for this surface. The partially reflecting surface is a surface with photometric behavior: diffuse and specular. The photometric behavior of surface is translated by modeling the different interaction of light and material. So the surface relief reconstruction by photometric stereo can be in theory obtained by the exploitation of these different models. However, the implementation of these models can be proved delicately (reversibility of model, parameters dependent on materials…). Thus after the presentations on the photometric models of reflection and the relief extraction methods by the exploitation of these models, we proposed two relief extraction methods for the partially reflecting surface. The first method is to detect the specular area on acquired images and to decompose the acquired images in two parts: diffuse area and specular area. We obtained therefore the gradient field on diffuse area by Lambert’s model and the gradient field on specular area by geometric optics. With regard to the second method, we know that a specular facet in a direction can not be specular in other direction. So we proposed an idea that is to augment the number of acquired images to avoid using the specular image for relief extraction. This method is a photometric stereo system with six light sources. We determined the gradient field pixel by pixel with three non specular images among six acquired images. After that we carried out the relief extraction on the synthesized images and on the real images by each method. Then we evaluated and compared the results obtained by these different methods. Finally, we made a mass of applications on diverse surfaces by two proposed methods.
Keyword: light-material interaction, partially reflecting surface, specular reflection, relief extraction, model of reflection, photometric stereo.
Table des matières
Résumé ... 5
Table des matières ... 9
I. Introduction... 13
I.1 Lumière, matière et observateur... 15
I.2 Surfaces texturées rugueuses et partiellement réfléchissantes ... 15
I.3 Objectifs... 16
I.4 Organisation ... 17
II. Modèles photométriques pour la réflexion ... 19
II.1 Introduction ... 21
II.2 Types de réflexion dans le cas général... 22
II.2.1 Réflexion diffuse... 22
II.2.2 Réflexion spéculaire ... 23
II.2.3 Réflexion mixte ... 23
II.3 Grandeurs photométriques... 24
II.4 Fonction de distribution de la réflectance bidirectionnelle ... 26
II.5 Modélisation des phénomènes d’interaction lumière-matière-observateur ... 27
II.5.1 Modèle Lambertien... 28
II.5.2 Modèle d’Oren-Nayar... 29
II.5.3 Modèle de Kube... 31
II.5.4 Modèle de Phong ... 32
II.5.5 Modèle de Blinn-Phong ... 33
II.6 Conclusion ... 36
III. Extraction de relief par stéréovision photométrique... 37
III.1 Introduction ... 39
III.2 Stéréovision photométrique... 41
III.3.1 Extraction de relief par exploitation de modèle Lambertien ... 42
III.3.2 Extraction de relief par exploitation de modèle d’Oren-Nayar ... 46
III.3.3 Extraction de relief par le modèle de Blinn-Phong ... 50
III.4 Méthode d’intégration ... 56
III.4.1 Généralités... 56
III.4.2 Intégration par transformée de Fourier ... 58
III.5 Applications sur images synthétiques... 59
III.5.1 Base des images synthétiques... 59
III.5.2 Résultats d’extraction par le modèle Lambertien ... 61
III.5.3 Résultats d’extraction par le modèle d’Oren-Nayar ... 63
III.5.4 Résultats d’extraction par le modèle de Blinn-Phong ... 64
III.5.5. Evaluation... 65
III.6 Applications sur images réelles ... 66
III.6.1 Base des images réelles ... 66
III.6.2 Résultat d’extraction par le modèle Lambertien... 68
III.6.3 Résultat d’extraction par le modèle d’Oren-Nayar... 70
III.6.4. Résultat d’extraction par le modèle de Blinn-Phong ... 72
III.6.5. Evaluation... 73
III.7 Conclusion... 75
IV. Extraction de relief par deux nouvelles méthodes proposées ... 77
IV.1 Introduction ... 79
IV.2 Détection de la zone spéculaire sur l’image originale ... 80
IV.2.1 Détection de spécularité sur l’image en niveaux de gris... 81
IV.2.2 Détection de spécularité sur l’image en couleur ... 83
IV.2.2.1 Diagramme MS... 83
IV.2.2.2 Détection de spécularité... 84
IV.3 Calcul de champ de gradient dans la zone spéculaire... 86
IV.3.1 Méthode à partir de la détermination de la position des microfacettes dans la zone spéculaire... 87
IV.3.2 Méthode d’extraction de relief avec six images ... 91
IV.4.2 Résultat d’extraction par la méthode par le modèle Lambertien avec six images 98
IV.5 Applications sur images réelles... 100
IV.5.1 Résultat d’extraction par la méthode à partir de la détermination de la position des microfacettes dans la zone spéculaire ... 100
IV.5.1.1 Extraction de relief avec détection de spécularité sur l’image en niveaux de gris ... 100
IV.5.1.2 Extraction de relief avec détection de spécularité sur l’image en couleur102 IV.5.2 Résultat d’extraction par la méthode par le modèle Lambertien avec six images104 IV.5.2.1 Extraction de relief avec détection de spécularité sur l’image en niveaux de gris ... 104
IV.5.2.2 Extraction de relief avec détection de spécularité sur l’image en couleur106 IV.6 Evaluation... 107
IV.6.1 Evaluation de la méthode à partir de la détermination de la position des microfacettes dans la zone spéculaire... 107
IV.6.2 Evaluation de la méthode par le modèle Lambertien avec six images ... 108
IV.7 Conclusion ...111
V. Applications ...113
V.1 Dispositif d’acquisition pour l’extraction de relief ...115
V.2 Caractéristique de dispositif d’acquisition ...115
V.3 Résultats d’extraction de relief sur divers surfaces ...117
V.3.1 Surfaces de crépis muraux ...117
V.3.2 Surfaces de crépis muraux partiellement réfléchissants par paillette ...119
V.3.3 Surfaces de crépis muraux partiellement réfléchissants par mouillage... 137
V.4 Conclusions... 140
Conclusions et perspectives... 143
I.1 Lumière, matière et observateur
Le système visuel humain nous permet d’interpréter le monde 3D qui nous entoure et nous permet de percevoir les informations sur cet environnement. Dans ce système, l’oeil saisit la scène et à partir de cette scène nous percevons diverses informations : la matière (bois, plastique, métal), la couleur, le mouvement, la propriété physique (lisse, rugueux ou transparent) de l’objet. Le cerveau analyse la scène et traite les informations utiles. Dans le domaine de vision par ordinateur, un système visuel artificiel est proposé pour réaliser la fonction du système visuel humain. Dans ce système, un capteur joue le rôle de l’oeil pour obtenir les images. La vision par ordinateur analyse les informations des images et cherche les théories et les modèles pour construire le système visuel artificiel.
Par conséquent, l’exploitation d’un modèle photométrique de réflexion est le coeur du système visuel artificiel. Le modèle photométrique de réflexion décrit la relation entre l’éclairement réfléchi et l’éclairement incident. Donc les paramètres du modèle comprennent trois parties : les propriétés physiques des matières, les positions des sources et de l’observateur et les mécanismes physiques des phénomènes d’interaction matière-observateur. Comprendre les mécanismes physiques des phénomènes d’interaction lumière-matière-observateur tels que l’ombre, la spécularité, le masquage, l’interréflexion peut nous permettre de bien modéliser ces phénomènes et d’améliorer les modèles actuels. Cette thèse s’intéresse à l’analyse des surfaces texturées rugueuses pouvant avoir un comportement photométrique hétérogène et aux méthodes d’extraction de relief pour ces surfaces. Vu la précision recherchée dans le cadre de nos applications, nous choisissons une approche monoculaire de type stéréovision photométrique.
I.2 Surfaces texturées rugueuses et partiellement réfléchissantes
Dans cette thèse, nous analysons les surfaces texturées 3D et nous analysons plus particulièrement les surfaces rugueuses. La surface rugueuse est constituée par une multitude de micro-aspérités distribuées aléatoirement sur la surface. Dans ce cas-là, la réflexion diffuse qui se produit est constituée par l’ensemble des réflexions spéculaires sur la multitude de microfacettes orientées aléatoirement. Ceci signifie que l'énergie incidente à une surface est réémise de façon uniforme par cette surface. Donc l’extraction de relief des surfaces rugueuses diffuses peut être effectuée par la technique classique de stéréovision photométrique.
La technique classique de stéréovision photométrique basée sur l’exploitation de modèle photométrique de réflexion est originairement proposée par Woodham [Woo80] en 1980. Woodham a indiqué que le relief d’une surface lambertienne ne peut être déterminé que par l’acquisition de trois images obtenues en éclairant la surface sous trois différentes incidences. Ainsi la solution est obtenue en résolvant un système de trois équations à trois inconnues obtenues après inversion du modèle photométrique utilisé. Ces inconnues sont les deux dérivées partielles de la surface ( p et q ) et l’albédo ρ.
Dans notre recherche, la surface partiellement réfléchissante est un type de surface dont la particularité est de ne réfléchir spéculairement qu'une partie de la lumière qu'il reçoit. Donc une partie de cette surface se comporte comme la surface diffuse, une autre partie de cette surface se comporte comme la surface spéculaire.
Figure 1. 1 : Surface partiellement réfléchissante
I.3 Objectifs
La technique de stéréovision photométrique peut extraire le relief de la surface par l’analyse des intensités lumineuses de l’image. Mais les intensités des pixels dans la zone spéculaire acquis par la caméra sont généralement saturées et donc peu porteuses d’informations. Elles ne peuvent pas présenter la couleur réelle de la surface dans la zone spéculaire. Cette zone spéculaire influence donc la qualité de l’extraction de relief. Mais la plupart des algorithmes de l’extraction de relief ignorent les contributions spéculaires. Donc dans cette thèse, nous proposerons deux méthodes pour réaliser l’extraction de relief d’une surface partiellement
Composante diffuse
Plusieurs méthodes ont été proposées pour l’extraction de relief d’une surface partiellement réfléchissante. Coleman et Jain [CJ82] utilisent quatre images pour détecter la zone spéculaire et extraient le relief à partir des trois images les moins spéculaires parmi les quatre images pour chaque pixel. Healey et Binomial [HB88] utilisent le modèle de Torrance-Sparrow pour recouvrer la courbure de lobe spéculaire. Soloman et Ikeuchi [SI96] ont proposé une méthode de stéréovision photométrique à quatre sources pour éliminer la spécularité et l’ombrage en divisant la surface en trois parties : une partie illuminée par quatre sources, une par trois sources et une par deux sources. Différentes stratégies sont proposées pour extraire le relief de chaque partie.
Par rapport aux méthodes citées ci-dessus, les approches que nous développons sont plus simples et plus rapides puisqu’elles peuvent utiliser le même dispositif d’acquisition que la méthode de stéréovision photométrique par modèle Lambertien et résoudre le problème de la spécularité qui ne peut pas être traité par modèle Lambertien.
Ainsi, nous proposons dans ces travaux deux méthodes permettant d’obtenir le champ de gradient des pixels de la zone spéculaire. La première méthode se base sur la connaissance de la position des microfacettes dans la zone spéculaire. A partir de la connaissance de la position des microfacettes et de la configuration de l’éclairage nous pouvons déterminer le champ de gradient dans la zone spéculaire, nous pouvons donc traiter les influences des réflexions spéculaires pour l’extraction de relief de surface. La deuxième méthode se base sur le modèle Lambertien mais nécessite six images. Nous savons qu’une facette spéculaire dans une direction peut ne pas l’être dans l’autre direction. Nous pouvons donc extraire le relief avec trois images non spéculaire parmi les six images pour chaque pixel dans la surface.
I.4 Organisation
Dans le deuxième chapitre nous nous intéressons au comportement photométrique des surfaces et aux phénomènes de réflexion de la lumière sur la surface. La réflexion diffuse, la réflexion spéculaire et la réflexion mixte et divers types de réflexion seront analysés pour exploiter les modèles photométriques de ces réflexions. Nous présenterons alors les différents modèles photométriques qui traduisent les phénomènes de ces réflexions.
Le troisième chapitre, après un bref aperçu des techniques de stéréovision pour l’extraction du relief, se focalise sur les méthodes d’extraction de relief par exploitation des modèles photométriques. Pour les surfaces diffuses, nous extrayons le relief avec le modèle Lambertien et le modèle d’Oren-Nayar. Et pour les surfaces spéculaires, nous extrayons le
relief avec le modèle de Blinn-Phong. Les évaluations de la précision de la méthode de reconstruction sont aussi proposées dans chaque section pour comparer les performances de la méthode de reconstruction sur les divers surfaces et préciser les limites de ces approches. Par ailleurs nous présenterons aussi les méthodes d’intégration des champs de gradients obtenus. Nous nous focaliserons sur l’algorithme de Frankot-Chellappa.
Dans le quatrième chapitre nous présenterons les deux méthodes développées pour l’extraction du relief dans le cas d’une surface partiellement réfléchissante. Pour cela, nous décomposons les images en deux types de régions. Une région où la composante diffuse est prédominante et une où la composante spéculaire est prépondérante. La composante diffuse est traitée par la méthode classique de stéréovision photométrique exploitant un modèle de type Lambertien. Pour la première méthode la composante spéculaire est traitée par détermination de la position des microfacettes de la zone spéculaire. Pour la deuxième méthode la composante spéculaire est traitée par exploitation d’un jeu optimisé des trois images les moins spéculaires parmi les six images.
Le dernier chapitre présente les résultats obtenus sur diverses applications en ce qui concerne l’extraction de relief avec chaque méthode présenté ci-dessus ainsi que les comparaisons des performances de chaque méthode.
II.1 Introduction
La technique de stéréovision photométrique est basée sur l’exploitation du modèle photométrique de réflexion. Donc bien comprendre les différents modèles photométriques de réflexion et choisir un modèle photométrique de réflexion adapté à la scène étudiée est très important.
Afin d’exprimer fidèlement les aspects et les caractéristiques des matériaux lors de leur observation dans la nature, il est nécessaire de préciser leurs propriétés photométriques au travers de l'analyse des phénomènes de réflexion et de transmission de la lumière qui leurs sont liés. Il s'agit en particulier de spécifier le lien entre l'énergie reçue par la surface et celle réémise. Pour cela, nous devons prendre en compte les différents phénomènes d’interaction lumière-matière-observateur, la nature du matériau de l’objet et les phénomènes de réflexion.
Dans la nature, les principaux phénomènes d’interaction entre la lumière et la surface comprennent la réflexion, la transmission, l’absorption, la diffraction, la réfraction et l’interférence. Cependant nous nous intéressons ici particulièrement aux phénomènes de réflexion et aux modèles de réflexion [Bru02], [NIK91], [Orc69], [Tre93]. Les modèles étudiés dans notre recherche sont locaux, seule la réflexion directe ou première interréflexion de la lumière sur une facette est considérée. Ils ne considèrent pas la réflexion indirecte (et quelques fois l’interréflexion de la lumière sur les facettes), les phénomènes de l’absorption, de la diffraction, et de la réfraction. Ces modèles décrivent le comportement de la lumière réfléchie sur la certaine surface et exploitent la relation entre l’énergie de la lumière réfléchie et de la lumière incidente en fonction des propriétés géométriques de la scène telles que les variations locales du relief ou les variations des propriétés photométriques.
La nature du matériau de l’objet est aussi prise en compte par notre étude lors de la modélisation de l’interaction lumière-matière-observateur. Les matériaux peuvent être dégroupés en deux classes selon leurs propriétés optiques et leurs paramètres : les matériaux conducteurs et les matériaux diélectriques [Bru02], [Sha85].
Les matériaux conducteurs atténuent rapidement l’onde incidente. Donc ils laissent très peu l’onde incidente les pénétrer, ce qui implique que le phénomène de réflexion s’opère essentiellement à la surface.
Les matériaux diélectriques sont des matériaux peu conducteurs. Ces matériaux laissent une grande partie de l’onde incidente les pénétrer. Cette onde incidente est ensuite réémise par
réflexion diffuse dans toutes les directions ou transmise par réfraction. Cela dépend de la composition interne du matériau.
Si les particules d’un matériau possèdent différentes propriétés optique, ce matériau est appelé matériau inhomogène. Dans ce cas, le calcul de l'onde réfléchie doit tenir compte de l'interaction de l'onde incidente avec les particules. Le plastique, le bois et la peinture sont considérés comme inhomogènes.
Les matériaux homogènes tels que le verre possèdent un indice de réfraction constant à l’intérieur du matériau. Pour ce type d'objet la réflexion de l'onde incidente peut être décrite uniquement à partir de la réflexion de l'onde sur la surface du matériau.
En raison des différences des matériaux, les différents types de réflexion s’opèrent à la surface.
II.2 Types de réflexion dans le cas général
Les modèles photométriques de réflexion décrivent les aspects du comportement de la lumière sur une surface. Ces aspects du comportement sont aussi les phénomènes de réflexion. La rugosité de la surface est la raison principale de production des différents phénomènes de réflexion.
II.2.1 Réflexion diffuse
Nous allons considérer un type particulier de surface appelé réflecteur diffus idéal. Au niveau microscopique, une surface de ce type est considérée comme très rugueuse. Grâce aux variations microscopiques de la surface, un rayon de lumière incidente est réfléchi de manière égale dans toutes les directions de l’hémisphère.
Dans ce cas, l'intensité de l'énergie émise par un point de la surface est donc indépendante de la direction d'observation et est uniquement fonction de la quantité d'énergie incidente arrivant sur cette surface.
II.2.2 Réflexion spéculaire
La réflexion spéculaire parfait a lieu sur les " miroirs " parfaits. Dans ce cas, le rayon réfléchi
r sur une surface plane est symétrique du rayon incident s par rapport à la normale
n
r
; c’est donc une réflexion selon une direction privilégiée, d’après les lois de Descartes : l’angle de la réflexion spéculaire parfait est égal à l’angle d’incidence comme le montre la figure suivante.Figure 2.2 : Réflexion spéculaire parfaite
Par contre, pour des objets réels (réflecteur spéculaire imparfait), la direction de l’observateur v n’est pas symétrique de la direction de la source. Si on se prend le rayon réfléchi dans l'oeil alors on a l'intensité maximum. Autour de cela, on peut quand même voir quelque chose d'un peu atténué. Ça veut dire que la surface ne réfléchit pas directement le rayon mais qu'il y a une certaine "diffusion" autour du rayon réfléchi. Cette zone de "diffusion" est appelée lobe spéculaire.
Figure 2.3 : Réflexion spéculaire imparfaite
II.2.3 Réflexion mixte
Une réflexion plus générale est basée sur la possibilité de tenir compte simultanément de la réflexion diffuse et de la réflexion spéculaire.
ϕ r
θ
iθ
v Lobe spéculaire nrs
rn
r
iθ
s
rθ
rFigure 2.4 : Réflexion spéculaire et diffuse
En plus, dans le cas pratique nous pouvons ajouter une composante de la réflexion ambiante dans cette réflexion mixte. Afin de modéliser les phénomènes de réflexion nous présentons d’abord la photométrie permettant de mesurer ces phénomènes par les unités photométriques de mesure.
II.3 Grandeurs photométriques
La photométrie est la science qui étudie le rayonnement lumineux du point de vue de la perception de l'œil humain. Elle est à l’origine de la radiométrie qui est la science de la mesure de l’énergie radiante en matière de puissance. En général, la photométrie se rapporte à la sensation de l'oeil de la lumière, tandis que la radiométrie se rapporte à la quantification de la réalité physique. Les données optiques radiométriques peuvent être transformées en unités photométriques. Par conséquent, les différents phénomènes d’interaction lumière-matière-observateur se mesure par photométrie. Plusieurs unités photométriques de mesure sont définies ci-dessous :
Le flux énergétique Φe représente l’énergie émise ou reçue par sur une surface par unité de
temps. Il s’exprime en Watt.
dt
dQ
ee
=
Φ
(2.1) L’angle solide dΩ est l’angle bidimensionnel qu’un objet sous-tend à un point dans l'espace tridimensionnel. Il mesure la surface sur laquelle un objet se projette radialement sur une sphère de rayon unitaire. L’angle solide d’un objet est égal à la région de la segmentation de la sphère unitaire restreinte par l’objet. Il s’exprime en stéradians (Sr).r
θ
i
θ
Lobe spéculaireLobe diffus Pic spéculaire
Lumière incidente n r
s
Où dS représente l’aire que découpe le cône sur la sphère de rayon r dont le centre est au sommet du cône. La figure suivante présente l’angle solide sustenté par un objet.
Figure 2.5 : Angle solide sustenté par un objet
L’intensité énergétique I d’une source est le flux énergétique émis par une source par unité d’angle solide. Elle s’exprime en W.sr−1.
Ω
Φ
=
d
d
I
e (2.3)L’éclairement énergétique E en un point d’une surface est le flux énergétique incidente à la surface par unité de surface. Il s’exprime en W.m−2.
2 2
r
I
r
d
d
dS
d
E
e e=
×
Ω
Φ
=
Φ
=
(2.4) La luminance énergétique L d’une source est le flux énergétique dΦe émis par unité d’anglesolide dΩ et par unité de surface apparente dScos
θ
i d’un élément de surface dans ladirection
(
θ
i,φ
i)
. Elle s’exprime en2 1 − −m sr W . i i e
dS
dI
dS
d
d
L
θ
θ
cos
cos
2=
Ω
Φ
=
(2.5) La radiosité B aussi appelée emmitance M est le flux énergétique émis par unité de surface d’une source étendue dans un hémisphère. Elle s’exprime en W.m−2.
dS
d
M
B
=
=
Φ
e (2.6) r Ω d dS xr z r yr iθ
ObjetLes quantités physiques photométriques et radiométriques sont listés dans le tableau suivant.
Symbole Quantité physique Définition Unité
e Q Energie - Joule e Φ Flux énergétique dt dQe Watt I Intensité énergétique Ω Φ d d e 1 .sr− W E Eclairement énergétique 2 r I dS d e = Φ 2 .m− W L Luminance énergétique i i e dS dI dS d d θ θ cos cos 2 = Ω Φ −1 −2 m sr W B ou M Radiosité ou Emittance dS dΦe 2 .m− W
Tableau 2.1 : Quantités physiques photométriques et radiométriques
II.4 Fonction de distribution de la réflectance bidirectionnelle
La réflectance définit la façon dont la lumière est réfléchie sur une surface opaque. Elle est désignée comme le rapport de la luminance énergétique émise par un élément de surface sur l’éclairement reçu par cet élément de surface.
( ) ( )
( )
λ
λ
λ
E
L
R
=
(2.7)Dans notre cas, nous utilisons une source de lumière directionnelle, donc la surface ne reçoit la lumière que d’une direction unique et n’émet un flux réfléchi que dans une seule direction. La réflectance est aussi appelée la fonction de distribution de la réflectance bidirectionnelle (BRDF, bidirectional reflectance distribution fonction en anglais).
(
)
(
)
(
θ
θ
φ
φ
λ
λ
)
λ
φ
φ
θ
θ
,
,
,
,
,
,
,
,
i i r r i r i rdE
dL
R
=
(2.8) Où(
θ
i,φ
i)
est la direction de la lumière incidente et(
θ
r,φ
r)
est la direction de la lumièreréfléchie.
La fonction de BRDF traduit la proportion d'énergie provenant d'une direction incidente qui est réfléchie dans une direction donnée. Elle tient compte des angles d'incidence et de la réflexion relative à l'angle d'orientation local de la surface et de la longueur d'onde de la lumière incidente. Elle permet de caractériser le comportement photométrique de chaque matériau. Ainsi, pour un éclairement selon une direction d'incidence donnée, cette BRDF permet de définir, pour chaque direction de réflexion la contribution de cet éclairement à la luminance réfléchie. Donc la BRDF peut être utilisée pour la modélisation des phénomènes d’interaction lumière-matière-observateur.
II.5 Modélisation des phénomènes d’interaction lumière-matière-observateur
D’une part, en connaissant la forme d’un objet, sa texture, sa rugosité et la position des sources lumineuses, nous pouvons modéliser la manière dont l’objet réfléchit la lumière dans une certaine direction (celle de l’observateur). D’autre part, la compréhension des mécanismes de réflexion lumineuse permet d’extraire des propriétés de surface, notamment la rugosité, à partir de l’intensité de la lumière réfléchie par l’objet. De nombreux travaux dans la littérature explicitant la fonction de BRDF peuvent être divisés en trois classes : le modèle empirique de BRDF, le modèle de rugosité de surface et le modèle de réflexion photométrique.
Il existe un grand nombre de modèles empiriques de BRDF. Il s’agit de modèles vérifiant les propriétés particulières de BRDF à partir d'une mesure de la luminance du matériau dans les différentes directions de l'espace, mais qui ne sont pas basés sur une réalité physique [War92].
Le modèle de rugosité de surface modélise les micro-aspérités de la surface. Beckmann et Spizzichino [BS87] ont développé un modèle qui exploite les propriétés électromagnétiques de la lumière et modélise les micro-aspérités par une distribution normale des hauteurs d’aspérités. Torrance et Sparrow [TS67] ont développé un modèle qui néglige l'aspect électromagnétique de la lumière et modélise les micro-aspérités par une série de microfacettes. Le modèle de Nayar [NIK91] peut se concevoir comme une synthèse des modèles de Beckmann-Spizzichino et Torrance-Sparrow. Il réunit trois composantes : un pic spéculaire, un lobe spéculaire et un lobe diffus, comme l’illustre la figure 2.4.
Le modèle de réflexion photométrique modélise les phénomènes de réflexion tel que la réflexion diffuse et la réflexion spéculaire. La technique de stéréovision photométrique est basée sur l’exploitation du modèle de réflexion photométrique. Nous allons donc détailler plusieurs modèles de réflexion photométrique par la suite.
II.5.1 Modèle Lambertien
Le modèle Lambertien formulé par Lambert en 1760 [Lam60] est le modèle le plus simple pour décrire la réflexion diffuse. La loi lambertienne énonce que l’énergie réfléchie par une facette, dans une direction particulière, est proportionnelle au cosinus de l’angle que fait la normale à la facette avec la direction de la source [TS67]. Elle détermine la quantité d’énergie réfléchie de lumière incidente. Ce modèle ignore l’ombrage, le masquage et l’interréflexions. Sous ces hypothèses, l’énergie réfléchie dans n’importe quelle direction est constante dans ce modèle. Voici l’équation de modèle Lambertien :
I
=
I k
0 dcos
θ
(2.9) Avec0
I est l'intensité de la source lumineuse
d
k est coefficient de réflexion diffuse
θ est l'angle entre la direction de la source et la normale à la surface Conformément à la figure suivante,
Figure 2.6 : Cas de réflexion Lambertien
Nous pouvons trouver le lien entre l’éclairement E reçu par un capteur en fonction de l’intensité I0 de la source avec les relations
ρ
=ks et E I2r = : nr
θ Source
s
0 2
cos
I
E
r
ρ
θ
=
(2.10)Intuitivement, un objet lambertien sera donc un objet dont la couleur et l’aspect ne varient pas lorsque l’on se déplace.
II.5.2 Modèle d’Oren-Nayar
Le modèle lambertien est une approximation à la composante diffuse, mais il n’est pas suffisant pour les objets réels. Oren et Nayar ont donc proposé une généralisation du modèle Lambertien tenant compte des phénomènes de masquage, d'ombrage et d’interréflexion [ON94]. Ils supposent que les microfacettes de la surface sont une distribution de formes élémentaires particulières. Ces formes sont des V-cavités.
Figure 2.7 : Phénomène d’ombrage (a), de masquage (b) et d’interréflexion (c)
Dans cette figure, zr est la normale à la surface, av est la normale à la microfacette,
ω
désigne la surface d’une facette de la V-cavité, m désigne la surface de la portion ombragée S da la facette opposée et mV désigne la surface de la portion masquée. Dans ces conditions, l’éclairement total E reçu par le capteur s’exprime selon :L I
E
=
GAF
×
E
+
E
Le premier terme désigne la composante lambertienne qui considère les phénomènes d’ombrage et de masquage, le deuxième terme désigne la composante d’interréflexion.
D’après la figure 2.7, dans le cas d’ombrage, la facette est seulement éclairée d’une façon partielle comme la facette adjacente de la V-cavité empêche une partie de la lumière incidente de lui parvenir. De même dans le cas du masquage, la facette est partiellement visible pour le capteur puisque la facette adjacente en masque une partie. L’éclairement reçu par le capteur est donc atténué par ces deux configurations géométriques. Cette atténuation de l’éclairement
xr S m xr V r V m (a) (b) xr zr (c) V r S r z r zr
ω
ω
av av avest nommée facteur d’atténuation géométrique GAF : 〉 〈 〉 〉〈 〈 〉 〈 〉 〉〈 〈 = a V z a z V a S z a z S GAF r v r v r r v r r v r r , , , 2 , , , , 2 , 0 max , 1 min (2.11) Ici, S ur
est la direction de la source, V
ur
est la direction d’observation, z
r
est la normale à la surface, av est la normale à la microfacette.
Le tableau suivant donne l’expression du facteur d’atténuation géométrique ainsi que la composante lambertienne de l’éclairement dans les cas particuliers suivants :
GAF ELembert Ni masquage ni ombrage 1 〈 〉〈 〉 〉 〈 〉 〈 z V z a a V a S E v r r r v r v r , , , , 0
ρ
Masquage 〈 〉 〉 〈 〉 〈 a V z a z V v r r v r r , , , 2 E 〈 aS 〉 v r , 2ρ
0 Ombrage 〈 〉 〉 〈 〉 〈 a S z a z S v r r v r r , , , 2 〉 〈 〉 〈 〉 〈 z V a V z S E r r v r r r , , , 2ρ
0Tableau 2.2 : Composante Lambertienne de l’éclairement pour différentes conditions d’ombrage / masquage
En plus de ce facteur d’atténuation géométrique, Oren et Nayar ont complété ce modèle par une composante due aux interréflexions entre facettes. Dans ce cas, l’éclairement dû à l’interréflexion en provenance de la facette opposée de V-cavité s’exprime sous la forme suivante :
IF
z
V
z
a
a
V
a
S
E
E
〉
〈
〉
〈
〉
〈
〉
〈
=
v
r
r
r
v
r
v
r
,
,
,
,
0 2 interπ
ρ
(2.12)Dans cette expression IF désigne le facteur d’interréflexions dont l’expression est donnée par :
( )
− − + = 1, 1, , 1,1 2 d m m d m d m d IF V S S Vω
ω
ω
ω
π
(2.13) Avec∫
==
π ϕϕ
π
2 0 inter2
1
a a IE
d
E
Ici,
θ
a est l’angle entre la normale à la surface zr et la normale à la microfacette av,ϕ
a est l’angle orbital de la source.II.5.3 Modèle de Kube
Le modèle de Kube n’est pas strictement un modèle de réflexion, il est une approximation du modèle de Lambert. Kube et Pentland [KP88] ont montré que dans le cas de faibles variations de relief et en l’absence d’ombrage et de masquage, le modèle de Lambert pourrait être linéarisé.
Nous savons que, dans le cas de surface lambertienne, l’éclairement reçu par le capteur peut s’écrire sous la forme suivante :
0 2 2
cos
sin
cos
sin
sin
1
ip
i iq
i iE
E
p
q
θ
θ
ϕ
θ
ϕ
ρ
−
−
=
+
+
(2.14)Donc Kube et Pentland ont approximé le modèle de Lambert en une série de Taylor du terme
2 2 1 1 q p + + :
[
]
(
2 2) (
2 2)
2 0 1 9cos sin cos sin sin 1 ...
2! 4!
i i i i i
E=
ρ
Eθ
−pθ
φ
−qθ
φ
− p +q + p +q + (2.15)
Si les pentes sont supposées faibles alors p<<1 et q<<1, les termes de fort (composante non linéaire) exposant peuvent être négligés. L’expression précédente peut être simplifiée :
[
]
0
cos
isin
icos
isin
isin
iE
=
ρ
E
θ
−
p
θ
φ
−
q
θ
φ
(2.16) Avec cette expression linéaire, Kube et Pentland [KP88] ont développé leur modèle spectral qui établit la relation entre le spectre de l’intensité d’image et le spectre de la variation de relief. Dans le domaine fréquentiel, les dérivées partielles p et q s’écrivent comme suit :( )
ω
,
θ
j
ρ
cos
θ
Z
( )
ω
,
θ
P
=
(2.17a)( )
ω
,
θ
j
ρ
sin
θ
Z
( )
ω
,
θ
Q
=
(2.17b) Où j représente le nombre complexe dont le carré est égal à -1, et ,ω θ représentent lescoordonnées polaires. Ignorant les valeurs moyennes et utilisant les expressions ci-dessus, l’équation de modèle de Kube peut s’écrire comme suit :
(
,
)
cos sin
icos
i(
,
)
sin sin
isin
i(
,
)
E
ω θ
= −
j
ω
θ
θ
φ
Z
ω θ
−
j
ω
θ
θ
φ ω θ
Z
(2.18)Ensuite en utilisant les propriétés trigonométriques, cette expression peut être simplifiée :
(
,
)
sin
icos
(
i) (
,
)
E
ω θ
= −
j
ω
θ
φ θ
−
Z
ω θ
(2.19) Cette expression exprime le lien entre le spectre de l’image E(
ω θ
,)
et le spectre de la surface(
,)
Z
ω θ
. Le spectre de l’image est fonction des angles orbitalφ
i et azimutalθ
i de l’éclairage. L’équation de Kube montre que le processus de photographie opère comme un filtre passe haut (multiplication par jω
).Validité du modèle de Kube
Gullon [Gul03] a fait les expérimentations pour évaluer la validité de modèle de Kube. Il a proposé un critère SRR (signal-to-residue ratio) pour déterminer la limite de négligence du terme non linéaire. Voici l’équation de SRR :
[
[
]
]
Kube Lambert LambertE
E
E
SRR
−
=
var
var
log
10
(2.20)Ici ELambert et EKube sont rendus par le modèle Lambertien et par le modèle de Kube.
[ ]
xvar est la variance de x. Gullon a conclu que la négligence du terme non linéaire est acceptable lorsque le SRR est supérieur à 10 dB. C’est à dire,
(
)
0
.
01
2
1
2+
2<
q
p
(2.21) Dans ce cas,0.3
p
<
q<0.3 II.5.4 Modèle de PhongDans le cas de réflexion spéculaire, la lumière réfléchie spéculaire est visible lorsque la direction de réflexion spéculaire coïncide avec la direction d’observation. Cependant, en réalité la situation n’est pas aussi simple. Autour de la direction de réflexion spéculaire, nous
"diffusion" autour de cette direction. Pour décrire ce phénomène [Pho75] Phong propose en 1975 un modèle permettant de calculer la quantité de lumière allant vers l’observateur en fonction du matériau.
Figure 2.8 : Cas du modèle de Phong
Dans ce modèle, la quantité de lumière réfléchie dépend d'une part des propriétés du matériau et d'autre part de l'angle
α
entre la direction spéculaire, symétrique à la direction de la source ponctuelle, et la direction d'observation. L’émission d'énergie peut être plus ou moins concentrée dans la direction spéculaire en faisant varier le coefficient n. Nous avons donc:(
)
0
cos
cos
n
E
=
ρ
E
i
α
(2.22) Ce modèle ne convient pas à la surface hétérogène puisque le coefficient de brillance n est constant pour la surface globale. Nous ne pouvons pas déterminer la tabulation du coefficient de brillance n.II.5.5 Modèle de Blinn-Phong
Blinn propose un modèle plus simple et plus rapide que le modèle de Phong, appelé le modèle de Blinn-Phong, qui est basé sur le demi vecteur h
r
[Bli77]. Ce demi vecteur est un vecteur avec une direction bissectrice de la direction d’observation et la direction de la source.
Figure 2.9 : Cas du modèle de Blinn-Phong
Blinn a montré qu’on pouvait optimiser la méthode en remplaçant cos
α
par cos( )
h a,r r : a r θ Source s r Observateur v r h r nr θ Direction spéculaire Source
s
Direction d’observation θα
( )
0cos
cos
,
nE
=
ρ
E
i
h a
r r
(2.23)Avec le demi vecteur
2 s v h= + r r r , a r
est le vecteur normal à la surface.
Coefficient de brillance n :
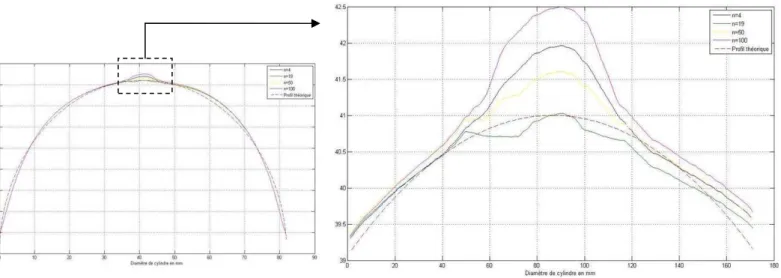
Nous pouvons trouver que le coefficient de brillance n joue un rôle très important dans le modèle de Phong et dans le modèle de Blinn-Phong. Ce paramètre contrôle la taille du lobe spéculaire. Le lobe spéculaire peut être moins ou plus concentré dans la direction du pic spéculaire en réglant le coefficient de brillance (voir la figure suivante). Ce paramètre reflète la brillance de la surface étudiée. Plus ce paramètre est grand et plus la surface est lisse. Phong [Pho75] a indiqué que le coefficient de brillance est empiriquement ajusté pour les images, ainsi qu’il n’existe pas de justifications et tabulation physiques.
Figure 2.10 : Comparaison du lobe spéculaire pour différents coefficients de brillance
D’après cette figure, nous pouvons trouver que le lobe spéculaire obtenu lorsque le coefficient de brillance n=15 est plus mince et plus long que celui obtenu lorsque n=5. Le coefficient de brillance n contrôle la taille de lobe spéculaire.
brillance n.
Figure 2.11 : Comparaison du lobe spéculaire p
La figure suivante illustre les variations du lobe spéculaire pour différents coefficients de brillance.
Figure 2.12 : Sphère métallique pour différents coefficients de brillance [AS00]
Nous trouvons que la sphère obtenue par ce modèle anisotropique est similaire à la sphère
n v
n
u
obtenue par le modèle traditionnel de Phong lorsque nv =nn (la sphère le long de la
diagonale), ainsi que les lissages des sphères augmentent avec l’augmentation du coefficient de brillance.
II.6 Conclusion
Ce chapitre a donné une introduction pour les phénomènes de réflexion et plusieurs modèles de réflexion photométrique qui seront utilisés dans le chapitre suivant.
Dans ce chapitre, les théories de réflexion lumineuse ont été revues. Nous avons enquêté sur les différents types de réflexion. Nous avons étudié la photométrie et la BRDF pour modéliser ces différents types de réflexion. En ce qui concerne ces différents types de réflexion nous avons décrit en détail les modèles correspondants. Le modèle Lambertien, le modèle d’Oren-Nayar et le modèle de Kube sont adaptables pour la réflexion diffuse. Le modèle de Phong et le modèle de Blinn-Phong sont adaptables pour la réflexion spéculaire.
D’ailleurs, nous avons fait attention au coefficient de brillance n. Ce coefficient est constant et empirique. Donc le modèle de Phong et le modèle de Blinn-Phong qui sont adaptables pour décrire une surface homogène, ne le sont pas pour décrire une surface hétérogène.
Le prochain chapitre présentera plusieurs méthodes d’extraction de relief exploitées par ces modèles de réflexion photométrique.
III.1 Introduction
Dans ce chapitre nous présenterons les techniques exploitant les modèles photométriques de réflexion de lumière pour l’extraction de relief d’une surface à partir de plusieurs images.
Pour cela, nous nous rappelons les types de surface. Selon les matériaux des surfaces nous pouvons dégrouper les surfaces en deux classes : surface homogène telle que le verre et surface inhomogène telle que le plastique. Selon la rugosité des surfaces, les surfaces peuvent être regroupées en deux classes : surface rugueuse et surface lisse. Selon l’aspect diffus directionnel, nous pouvons regrouper les surfaces en deux classes : surface isotrope et surface anisotrope. Une surface anisotrope réfléchit la lumière dans des directions aléatoires. Une surface anisotrope réfléchit la lumière dans des directions privilégiées. La réflexion diffuse réfléchit alors la luminance dans les directions aléatoires et la réflexion spéculaire produit des spécularités dans des directions proches des directions privilégiées. Selon le comportement photométrique des surfaces, les surfaces peuvent être dégroupées en deux classes : surface diffuse, surface spéculaire et surface mixte. Elles correspondent aux types de réflexion présentés dans le chapitre précédent.
Actuellement, les extractions de relief d'une surface rugueuse sont effectuées principalement au travers de capteurs tactiles ou de capteurs à focalisation de type laser. Ces capteurs permettent en général d'estimer le relief d'une surface au travers de l'analyse d'une série de relevés profilométriques. Comme ces mesures sont assez coûteuses en temps, nous espérons pouvoir déterminer le relief par traitement d’image. De nombreuses techniques d’extraction de relief ont été proposées dans le domaine du traitement d’images jusqu’à présent. Ces techniques peuvent être regroupées en deux catégories : les méthodes indirectes et les méthodes directes [Gul03].
Les méthodes directes peuvent mesurer directement la carte d’altitudes d’une surface [BTL93]. La technique time-of-flight est la plus importante des méthodes directes [FM08]. Elle peut estimer la carte d’altitudes d’une surface en mesurant le temps de vol de la lumière.
Les méthodes indirectes estiment la cartographie de relief d’une surface à partir des images d’intensité de surface éclairée et les paramètres de la configuration d’éclairage. Nous nous intéressons à ces méthodes. La technique de shape-from-contours [Wit80] peut déterminer précisément la normale à la surface en chaque point du contour apparent d’un objet. La technique de shape-from-texures [Alo88][BA89] peut estimer les variations de relief à partir des variations de texture. La technique shape-from-shadow [Dam98][Hat89][YC02] consiste à
analyser le contour de l’ombre projetée sur une surface par un objet qui cache partiellement cette surface à la source de lumière. L’analyse de ce contour permet d’obtenir une information partielle sur le relief de la surface “écran” ou sur celui de l’objet. Si on connaît le relief de l’écran, on peut en déduire une information partielle sur le relief de l’objet, et vice versa. La technique exploitant le flou optique [Kro87] emploie une séquence d’images prises avec une seule caméra à différents niveaux de défocalisation pour calculer la profondeur des objets. La technique de shape-from-shading [Hor90][HB86] et la technique de stéréovision photométrique [Woo80] déterminent les pentes (les dérivées partielles) d’une surface en exploitant la relation entre l’intensité d’image et la variation de la surface et déduisent la forme de la surface par l’intégration de ces pentes. Ces deux techniques nécessitent un contrôle des conditions d’éclairage de la scène. Cependant, ce sont des techniques simples, informatiquement peu coûteuses, rapides et qui permettent une reconstruction précise de la forme de la surface.
La technique de stéréovision photométrique se base, dans son principe, utilise un modèle photométrique d’où son appellation. Ce modèle exprime le lien entre l’image et les variations locales du relief ainsi que la réflectance de la surface et l’intensité de la source de lumière.
De nombreuses recherches [PCF01] [WK02], à partir de cette méthode, visent la reconstruction du relief à partir des dérivées partielles issues de la stéréovision photométrique. Ces auteurs proposent des méthodes de calcul d’intégrales qui soient les moins sensibles aux erreurs qui affectent les dérivées partielles du relief. Celles-ci sont dues au bruit des composants électroniques du dispositif d’acquisition ainsi qu’à la présence de l’ombre, imprévu par le modèle, et l’imprécision sur les positions des sources de lumières.
Dans cette thèse, nos travaux se basent sur la stéréovision photométrique. Le cœur de la stéréovision photométrique est l’exploitation de modèles photométriques et la détermination des dérivées partielles du relief. Dans ce chapitre nous présenterons les techniques de stéréovision photométrique par l’exploitation du modèle Lambertien, par l’exploitation du modèle d’Oren-Nayar et par l’exploitation du modèle de Blinn-Phong. Ces techniques de stéréovision photométrique permettent de déterminer le champ de gradient (les dérivées partielles) de la surface à partir de l’intensité des images originales et de la position des sources et permettent d’extraire le relief à partir de l’intégration du champ de gradient. Enfin nous présenterons les algorithmes d’intégration.
III.2 Stéréovision photométrique
L’estimation de la forme d’une surface à partir de ses images est un problème ancien en vision par ordinateur. En 1980 Woodham [Woo80] a indiqué que le relief d’une surface peut être déterminé par l’acquisition de trois images obtenues en éclairant la surface sous trois différentes incidences. Ainsi la solution est obtenue en résolvant un système de trois équations :
E
1( )
x
,
y
=
R
1(
p
( ) ( )
x
,
y
,
q
x
,
y
)
(3.1a)( )
x
y
R
(
p
( ) ( )
x
y
q
x
y
)
E
2,
=
2,
,
,
(3.1b)( )
x
y
R
(
p
( ) ( )
x
y
q
x
y
)
E
3,
=
3,
,
,
(3.1c) Où R(
p( ) ( )
x,y,q x,y)
est la réflectance de la surface au point( )
x,y et E ,( )
x y est l’image obtenue par éclairement de lumière sur la surface. Cette image n’est autre que l’éclairement reçu par un capteur au point( )
x,y . p ,( )
x y et q ,( )
x y sont le champ de gradient de la surface. Ils sont exprimés par
( )
x z y x p ∂ ∂ = ,( )
y z y x q ∂ ∂ = , (3.2)Ainsi, avec ce système de trois équations entre l’éclairement reçu par trois différentes incidences et le champ de gradient de la surface on peut déterminer le champ de gradient
( ) ( )
(
p x,y ,q x,y)
et déterminer le relief de la surface par l’intégration du champ de gradient. La procédure d’extraction est illustrée dans la figure ci-dessous. A partir de la méthode de Woodham, plusieurs améliorations importantes ont été proposées par les autres chercheurs [Kul96][KP97][ZS97].Figure 3.1 : Procédure d’extraction de relief
Plusieurs images acquises sous différentes configurations d’éclairage Modèle photométrique , z, z, E f Posdesource x y ρ ∂ ∂ = ∂ ∂
+
Champ de gradient p, q Intégration Obtention du relief z x y( )
,III.3 Méthode d’extraction de relief
III.3.1 Extraction de relief par exploitation de modèle Lambertien
Nous proposons de commencer à partir d’un modèle Lambertien, cette méthode exploite une stéréovision photométrique permettant d‘établir la relation entre les variations des niveaux de gris et les variations de relief. C’est aussi la relation entre l’éclairement reçu par un capteur et les dérivées partielles. D’après le chapitre précédent, nous avons l’équation de modèle Lambertien :
i
E
E
=
ρ
0cos
(3.3)Pour extraire le relief à partir de l’éclairement reçu, nous devons d’abord déduire la relation entre l’éclairement reçu et les dérivées partielles à partir de l’équation de modèle Lambertien.
Nous considérons le cas de la surface lambertienne éclairée par une source avec un angle
θ
i et observée par une caméra perpendiculaire :Figure 3.2 : Eclairement reçu par le capteur
Dans cette figure, S
ur
est la direction de la source, a
r
est le vecteur normal à la microfacette, i est l’angle entre la direction de la source et la direction de la normale à la microfacette,
ϕ
i est l’angle d’azimut entre l’axe xr
et les projections de trois sources dans le plan
( )
x y,r ur . Nous avons donc, sin cos sin sin i i i i S
θ
ϕ
θ
ϕ
= ur sin cos sin sin a a a a a θ ϕ θ ϕ = r (3.4) yr xr S r i φ i θ a θ a r zr a φ iPour établir la relation entre l’éclairement E reçu et le champ de gradient p z,q z x y =∂ = ∂ ∂ ∂ ,
il faut exprimer le terme cos i en fonction de la position de la source et des pentes p z x ∂ = ∂ et z q y ∂ = ∂ des facettes.
Pour cela nous considérons le plan tangent (p) à la facette, de vecteur directeur
sin
cos
sin
sin
cos
a a a a aa
θ
ϕ
α
θ
ϕ
β
γ
θ
=
=
r
(3.5) (p) a pour équation : αx+βy+γz=0. D’oùz
α
x
β
y
γ
γ
= −
−
(3.6)tan
acos
az
x
α
θ
ϕ
γ
∂ = − = −
∂
(3.7a) z tan asin a yβ
θ
ϕ
γ
∂ = − = − ∂ (3.7b) Le vecteur a rétant normé, nous avons :
2 2 2
1
α
+
β
+
γ
=
Nous avons donc :
2 2 2 2 2 2 tan a z z x y
α
β
θ
γ
∂ ∂ + + = = ∂ ∂ (3.8) Puis 2 2 2 2 1 1 cos 1 tan 1 a a z z x yθ
θ
= = + +∂ +∂ ∂ ∂ (3.9)2 2 1 cos 1 a z z x y
θ
= =γ
∂ ∂ + + ∂ ∂ (3.10)On peut donc poser :
2 2 1 1 1 z z x x z z a y z z y x y
γ
γ
γ
∂ ∂ − − ∂ ∂ ∂ ∂ = − = − ∂ ∂ ∂ ∂ + + ∂ ∂ r (3.11) Puis[
]
cos
i
=
S a
.
=
sin
θ
icos
ϕ
isin
θ
isin
ϕ
icos
θ
i.
a
ur r
r
(3.12)
2 2
cos
sin
cos
sin
sin
cos
1
ip
i iq
i ii
p
q
θ
−
θ
ϕ
−
θ
ϕ
=
+
+
(3.13)Donc, nous trouvons la relation entre l’éclairement E reçu et le champ de gradient :
0 2 2
cos
sin
cos
sin
sin
1
ip
i iq
i iE
E
p
q
θ
θ
ϕ
θ
ϕ
ρ
−
−
=
+
+
(3.14)Il s’agit d’un modèle à trois paramètres inconnus p, q,
ρ
E0. Nous devons choisir une configuration permettant d’obtenir au moins trois prises de vues.Un schéma du principe d’un dispositif de stéréovision photométrique est donné en figure suivante.