raitement et analyse des signaux par les méthodes basées EMD
Texte intégral
Figure


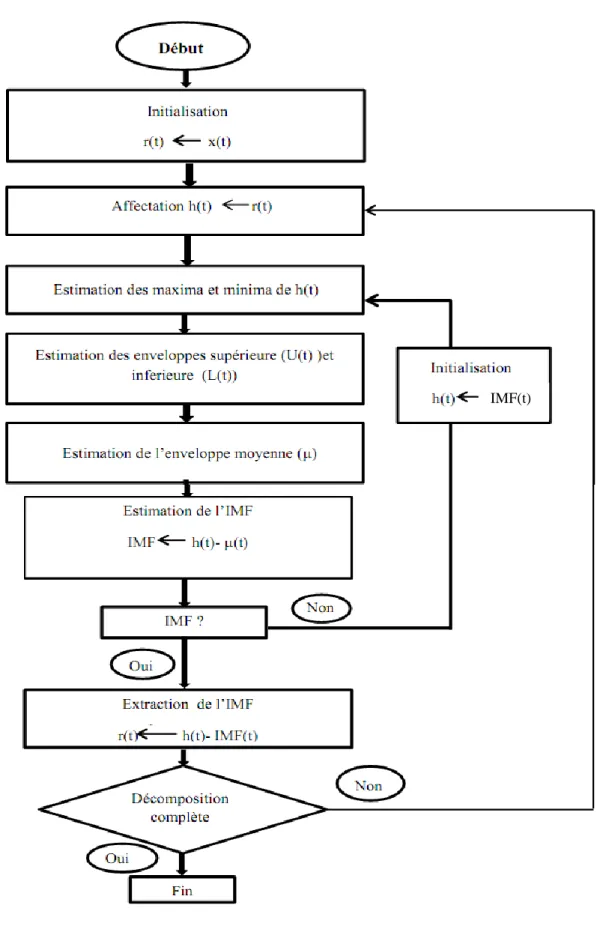
![Tableau 2.1. Pseudo-code de l’EMD [1].](https://thumb-eu.123doks.com/thumbv2/123doknet/3458596.101014/50.892.107.802.251.1115/tableau-pseudo-code-de-l-emd.webp)

![Tableau 3.1 Paramètres de modèle de variance à intervalles de confidence [26]](https://thumb-eu.123doks.com/thumbv2/123doknet/3458596.101014/76.892.100.794.368.498/tableau-paramètres-modèle-variance-à-intervalles-confidence.webp)
Outline
Documents relatifs
Au cours de ce chapitre, nous avons appliqu´ e la transform´ ee en ondelettes pour estimer les param` etres de la dispersion des ondes sismiques, dans le cas o` u la dispersion peut
La méthode proposée permet une localisation des capteurs dans le réseau en utilisant la technique de fingerprinting, suvie d’un apprentissage à l’aide des méthodes à noyaux.
L’histoire des solutions et des idées proposées est donnée pour les catégories suivantes : (1) concepts d’acquisition de l’ECG en IRM, (2) algorithmes et méthodes
L'intérêt des organismes gestion- naires pour des méthodes alternatives capables d'être appliquées sur tous les types de cours d'eau et de donner des indications
Dans le cadre de ce chapitre, les méthodes proposées sont appliquées pour contrôler la puissance de charge des véhicules électriques en mode de recharge numéro 3 (déjà présenté
et l'Analyse de Corrélation Canonique (CCA) [3,4], et ii) la Décomposition Modale Empirique (EMD) [5,6], une approche dite déterministe. Les performances de ces trois méthodes
Les modèles linéaires à variables latentes Dans le domaine de l’animation, les méthodes li- néaires de réduction de dimension sont exploitées non seulement lors des phases
a) Les sondeurs bathymétriques : sonars spécialisés dans la mesure de la hauteur d'eau ; ils émettent un signal verticalement vers le bas dans un faisceau étroit, et mesurent
