Dynamic whole-body motion generation under rigid contacts and other unilateral constraints
Texte intégral
Figure

Documents relatifs
Once it is recognized that suburbanites commuting to the central business district may consume the public services supplied by the central city, the tax gap widens because the
The “Segmentary theory” – in the different ways it developed from its premises by Durkheim (1893) who spoke of “agrégats semblables entre eux, semblables aux anneaux
Many studies (Biggs. Harvey & Wheeler. 1985~ Dienes, 1963; Kraus, 1982) have shown that problem solving strategies have been acquired and enhanced through the use
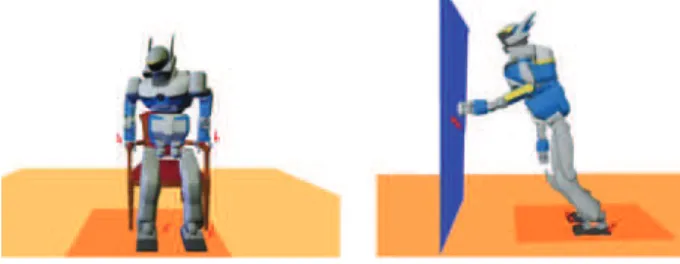
This paper proposes a complete solution to perform task- space (operational-space) inverse dynamics while taking into account various tasks, unilateral constraints such as
This chapter presents the foundations of the proposed methodology and is divided as follows. First, the task-function formalism, which is the basic form in which the motion
neutralitas est dispositio corporis lesionem efficiens, non tamen sensibilem‖. Several lines higher Bartholomew already singled out perceptible damage to function as
Existence of contacts for the motion of a rigid body into a viscous incompressible fluid with the Tresca boundary conditions... Existence of contacts for the motion of a rigid body
Next, to bridge a gap between the averaged problem and the works of Henon and Guyot (1970) and Benest (1975), we devote the section 4 to revisit the motion in the rotating frame in
