TRANSPORTATION OPTIMIZATION IN TACTICAL AND OPERATIONAL WOOD PROCUREMENT PLANNING
JAMES GREGORY RIX
DÉPARTEMENT DE MATHÉMATIQUES ET DE GÉNIE INDUSTRIEL ÉCOLE POLYTECHNIQUE DE MONTRÉAL
THÈSE PRÉSENTÉE EN VUE DE L’OBTENTION DU DIPLÔME DE PHILOSOPHIÆ DOCTOR
(MATHÉMATIQUES DE L’INGÉNIEUR) DÉCEMBRE 2014
c
ÉCOLE POLYTECHNIQUE DE MONTRÉAL
Cette thèse intitulée :
TRANSPORTATION OPTIMIZATION IN TACTICAL AND OPERATIONAL WOOD PROCUREMENT PLANNING
présentée par : RIX James Gregory
en vue de l’obtention du diplôme de : Philosophiæ Doctor a été dûment acceptée par le jury d’examen constitué de :
M. FRAYRET Jean-Marc, Ph. D., président
M. ROUSSEAU Louis-Martin, Ph. D., membre et directeur de recherche M. PESANT Gilles, Ph. D., membre et codirecteur de recherche
M. GENDREAU Michel, Ph. D., membre M. COELHO Leandro C., Ph. D., membre
ACKNOWLEDGEMENTS
First, I would like to thank my supervisors, Louis-Martin Rousseau and Gilles Pesant. This thesis could not have been completed without their knowledge, support, and perhaps most importantly patience. I want to acknowledge Jean-Marc Frayret and Michel Gendreau for agreeing to serve on my jury and carefully review my thesis. Finally I wish to thank Leandro Coelho for agreeing to serve as my external examiner and adapting his busy schedule to fit my thesis defense. This is an exceptional group of professors with whom it has always been a pleasure to work.
FPInnovations has played a vital role in this thesis, both financial and collaborative, over the course of my doctoral internship with their Value Maximization and Decision Support group. Their assistance in problem formulation, meeting with member companies, data collection, and development of an aesthetic and usable tool can not be understated. I wish to specifically thank Jean Favreau for leading this initiative, and Dave Lepage and Samir Haddad for their integral roles in development, testing, and debugging.
I also acknowledge the Natural Sciences and Engineering Research Council of Canada (NSERC), the Fonds de Recherche du Québec - Nature et Technologies, and the NSERC Value Chain Optimization Network for their financial support.
RÉSUMÉ
L’économie canadienne est dépendante du secteur forestier. Cependant, depuis quelques années, ce secteur fait face à de nouveaux défis, tels que la récession mondiale, un dollar canadien plus fort et une baisse significative de la demande de papier journal. Dans ce nouveau contexte, une planification plus efficace de la chaîne d’approvisionnement est devenue un élément essentiel pour assurer le succès et la pérennité du secteur.
Les coûts de transport représentent une dépense importante pour les entreprises forestières. Ceci est dû aux grands volumes de produits qui doivent être transportés sur de grandes dis-tances, en particulier dans le contexte géographique d’un grand pays comme le Canada. Même si les problèmes de tournée de véhicules sont bien couverts dans la littérature, le secteur forestier a beaucoup de caractéristiques uniques qui nécessitent de nouvelles formu-lations des problèmes et des algorithmes de résolution. À titre d’exemple, les volumes à transporter sont importants comparés à d’autres secteurs et il existe aussi des contraintes de synchronisation à prendre en compte pour planifier l’équipement qui effectue le chargement et le déchargement des véhicules.
Cette thèse traite des problèmes de planification de la chaîne logistique d’approvisionnement en bois: récolter diverses variétés de bois en forêt et les transporter par camion aux usines et aux zones de stockage intermédiaire en respectant la demande pour les différents produits forestiers. Elle propose trois nouvelles formulations de ces problèmes. Ces problèmes sont dif-férents les uns des autres dans des aspects tel que l’horizon de planification et des contraintes industrielles variées. Une autre contribution de cette thèse sont les méthodologies dévelop-pées pour résoudre ces problèmes dans le but d’obtenir des calendriers d’approvisionnement applicables par l’industrie et qui minimisent les coûts de transport. Cette minimisation est le résultat d’allocations plus intelligentes des points d’approvisionnement aux points de demande, d’une tournée de véhicules qui minimise la distance parcourue à vide et de déci-sions d’ordonnancement de véhicules qui minimisent les files d’attentes des camions pour le chargement et le déchargement.
Dans le chapitre 3, on considère un modèle de planification tactique de la récolte. Dans ce problème, on détermine la séquence de récolte pour un ensemble de sites forestiers, et on attribue des équipes de récolte à ces sites. La formulation en programme linéaire en nombres entiers (PLNE) de ce problème gère les décisions d’inventaire et alloue les flux de bois à des entrepreneurs de transport routier sur un horizon de planification annuel. La nouveauté de notre approche est d’intégrer les décisions de tournée des véhicules dans la PLNE. Cette méthode profite de la flexibilité du plan de récolte pour satisfaire les horaires des conducteurs
dans le but de conserver une flotte constante de conducteurs permanents et également pour minimiser les coûts de transport. Une heuristique de génération de colonnes est créée pour résoudre ce problème avec un sous-problème qui consiste en un problème du plus court chemin avec capacités (PCCC) avec une solution qui représente une tournée de véhicule.
Dans le chapitre 4, on suppose que le plan de récolte est fixé et on doit déterminer les allocations et les inventaires du modèle tactique précédent, avec aussi des décisions de tournée et d’ordonnancement de véhicules. On synchronise les véhicules avec les chargeuses dans les forêts et dans les usines. Les contraintes de synchronisation rendent le problème plus difficile. L’objectif est de déterminer la taille de la flotte de véhicules dans un modèle tactique et de satisfaire la demande des usines avec un coût minimum. Le PLNE est résolu par une heuristique de génération de colonnes. Le sous-problème consiste en un PCCC avec une solution qui représente une tournée et un horaire quotidien d’un véhicule.
Dans le chapitre 5, on considère un PLNE du problème similaire à celui étudié dans le chapitre 4, mais dans un contexte plus opérationnel: un horizon de planification d’un mois. Contrairement aux horaires quotidiens de véhicules du problème précédent, on doit planifier les conducteurs par semaine pour gérer les situations dans lesquelles le déchargement d’un camion s’effectue le lendemain de la journée où le chargement a eu lieu. Cette situation se présente quand les conducteurs travaillent la nuit ou quand ils travaillent après les heures de fermeture de l’usine et doivent décharger leur camion au début de la journée suivante. Ceci permet aussi une gestion plus directe des exigences des horaires hebdomadaires. Les contraintes de synchronisation entre les véhicules et les chargeuses qui sont présentes dans le PLNE permettent de créer un horaire pour chaque opérateur de chargeuse. Les coûts de transport sont alors minimisés. On résout le problème à l’aide d’une heuristique de génération de colonnes. Le sous-problème consiste en un PCCC avec une solution qui représente une tournée et un horaire hebdomadaire d’un véhicule.
ABSTRACT
The Canadian economy is heavily dependent on the forestry industry; however in recent years, this industry has been adapting to new challenges including a worldwide economic downturn, a strengthening Canadian dollar relative to key competing nations, and a signif-icant decline in newsprint demand. Therefore efficiency in supply chain planning is key for the industry to succeed in the future.
Transportation costs in particular represent a significant expense to forestry companies. This is due to large volumes of product that must be transported over very large distances, especially in the geographic context of a country the size of Canada. While the field of vehicle routing problems has been heavily studied and applied to many industries for decades, the forestry industry has many unique attributes that necessitate new problem formulations and solution methodologies. These include, but are not limited to, very large (significantly higher than vehicle capacity) volumes to be transported and synchronization constraints to schedule the equipment that load and unload the vehicles.
This thesis is set in the wood procurement supply chain of harvesting various assortments of wood in the forest, transporting by truck to mills and intermediate storage locations, while meeting mill demands of the multiple harvested products, and contributes three new problem formulations. These problems differ with respect to planning horizon and varied industrial constraints. Another contribution is the methodologies developed to resolve these problems to yield industrially applicable schedules that minimize vehicle costs: from smarter allocations of supply points to demand points, vehicle routing decisions that optimize the occurrence of backhaul savings, and vehicle scheduling decisions that minimize queues of trucks waiting for loading and unloading equipment.
In Chapter 3, we consider a tactical harvest planning model. In this problem we deter-mine the sequence of the harvest of various forest sites, and assign harvest teams to these sites. The mixed integer linear program (MILP) formulation of this problem makes inventory decisions and allocates wood flow to trucking contractors over the annual planning horizon, subject to demand constraints and trucking capacities. The novel aspect of our approach is to incorporate vehicle routing decisions into our MILP formulation. This takes advan-tage of the relatively higher flexibility of the harvest plan to ensure driver shifts of desired characteristics, which is important to retain a permanent driver fleet, and also prioritize the creation of backhaul opportunities in the schedule. A branch-and-price heuristic is developed to resolve this problem, with the subproblem being a vehicle routing problem that represents a geographical shift for a vehicle.
In Chapter 4, we assume the harvest plan to be an input, and integrate the allocation and inventory variables of the previous tactical model with vehicle routing and scheduling decisions, synchronizing the vehicles with loaders in the forests and at the mills. The syn-chronization constraints make a considerably more difficult problem. We use this as a tactical planning model, with no specific driver constraints but a goal of determining vehicle fleet size to maximize their utilization. The objective is to meet mill demands over the planning horizon while minimizing transportation and inventory costs, subject to capacity, wood fresh-ness, fleet balancing, and other industrial constraints. The MILP formulation of the problem is resolved via a column generation algorithm, with the subproblem being a daily vehicle routing and scheduling problem.
In Chapter 5, we consider a similar problem formulation to that studied in Chapter 4, but set in a more operational context over a planning horizon of approximately one month. Unlike the daily vehicle schedules of the previous problem, we must schedule drivers by week to manage situations of picking up a load on one day and delivering on another day, which is necessary when drivers work overnight shifts or when they work later than mill closing hours and must unload their truck on the next day’s shift. This also allows for more direct management of weekly schedule requirements. Loader synchronization constraints are present in the model which derives a schedule for each loader operator. Given mill demands, transportation costs are then minimized. We resolve the problem via a branch-and-price heuristic, with a subproblem of a weekly vehicle routing and scheduling problem. We also measure the benefits of applying interior point stabilization to the resource synchronization constraints in order to improve the column generation, a new application of the technique.
TABLE OF CONTENTS
ACKNOWLEDGEMENTS . . . iii
RÉSUMÉ . . . iv
ABSTRACT . . . vi
TABLE OF CONTENTS . . . viii
LIST OF TABLES . . . xi
LIST OF FIGURES . . . xii
LIST OF ABBREVIATIONS AND ACRONYMS . . . xiii
CHAPTER 1 INTRODUCTION . . . 1
1.1 Preliminaries . . . 1
1.1.1 FPInnovations . . . 2
1.2 Organization of the Thesis . . . 2
CHAPTER 2 LITERATURE REVIEW . . . 4
2.1 Related Vehicle Routing Problems . . . 4
2.1.1 Vehicle Routing Problems . . . 4
2.1.2 Inventory Routing Problems . . . 7
2.1.3 Synchronization in Vehicle Routing . . . 8
2.1.4 Branch-and-Price for Vehicle Routing Problems . . . 9
2.2 Operations Research in the Forest Products Industry . . . 13
2.2.1 Harvest Scheduling . . . 15
2.2.2 Transportation . . . 16
CHAPTER 3 ARTICLE 1: A TRANSPORTATION-DRIVEN APPROACH TO AN-NUAL HARVEST PLANNING . . . 21
3.1 Introduction . . . 23
3.2 Problem Definition . . . 24
3.3 Model Formulation . . . 26
3.3.2 Constraints . . . 26
3.3.3 A Reformulation for More Accurate Harvest Planning . . . 33
3.4 Methodology . . . 35
3.4.1 Initial Restricted Problem . . . 35
3.4.2 Enriching the Model with Column Generation . . . 35
3.4.3 Column Pool Management . . . 37
3.4.4 Heuristic Branch-and-Price . . . 37
3.5 Decomposed Approach . . . 38
3.6 Case Studies . . . 39
3.7 Experimental Results . . . 40
3.8 Conclusion . . . 43
CHAPTER 4 ARTICLE 2: A COLUMN GENERATION ALGORITHM FOR TACTI-CAL TIMBER TRANSPORTATION PLANNING . . . 44
4.1 Introduction . . . 46
4.2 Problem Definition . . . 47
4.3 Mathematical Formulation . . . 48
4.4 Methodology . . . 53
4.4.1 Initial Restricted Problem . . . 53
4.4.2 Enriching the Model with Column Generation . . . 53
4.4.3 Column Pool Management . . . 55
4.4.4 Generating an Integer Solution . . . 55
4.5 Case Studies . . . 56
4.6 Experimental Results . . . 57
4.7 Implementation into Decision Support System . . . 61
4.8 Conclusion and Future Work . . . 61
CHAPTER 5 ARTICLE 3: DOCK AND DRIVER SCHEDULING IN A TIMBER TRANSPORT SUPPLY CHAIN . . . 63
5.1 Introduction . . . 65
5.2 Problem Definition . . . 66
5.3 Model Formulation . . . 68
5.4 Methodology . . . 71
5.4.1 Initial Restricted Problem . . . 71
5.4.2 Enriching the Model with Column Generation . . . 72
5.4.3 Column Pool Management . . . 73
5.4.5 Heuristic Branch-and-Price . . . 75
5.5 Case Studies . . . 76
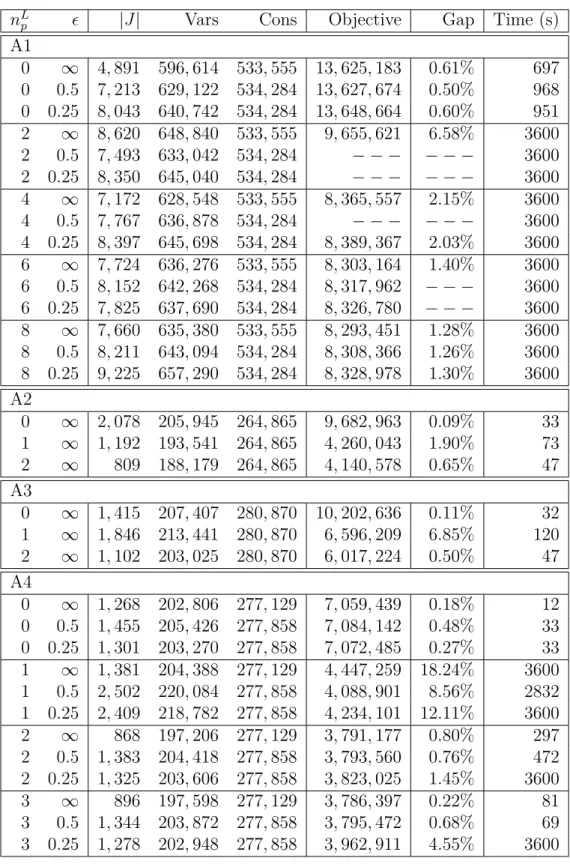
5.6 Experimental Results . . . 77
5.6.1 Sensitivity to Loader Availability . . . 77
5.6.2 Impact of Interior Point Stabilization . . . 80
5.6.3 Comparison with Unsynchronized Resolution . . . 80
5.7 Conclusion and Future Work . . . 82
CHAPTER 6 GENERAL DISCUSSION . . . 83
CHAPTER 7 CONCLUSION AND RECOMMENDATIONS . . . 85
LIST OF TABLES
Table 3.1 Input Sets . . . 27
Table 3.2 Input Data . . . 28
Table 3.3 Costs and Penalties . . . 29
Table 3.4 Variables . . . 29
Table 3.5 Objective Function Components . . . 30
Table 3.6 Experimental Results . . . 42
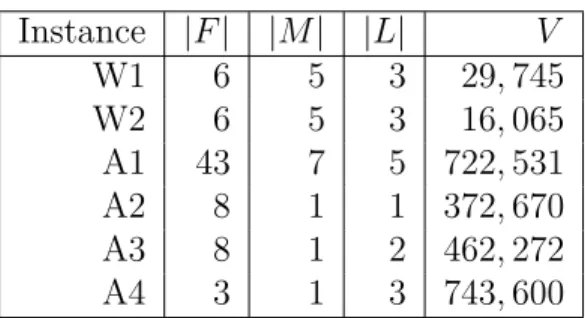
Table 4.1 Description of Case Studies . . . 56
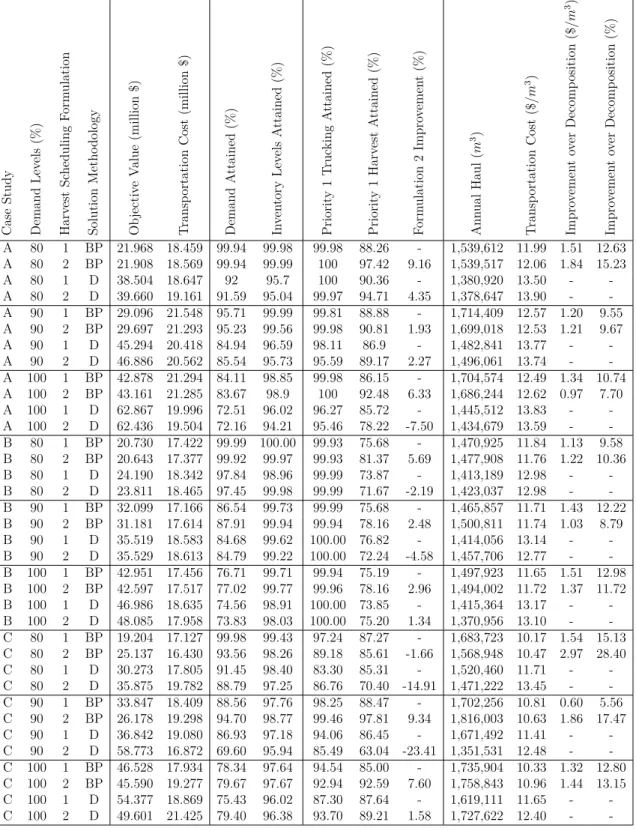
Table 4.2 Experimental Results . . . 58
Table 4.3 Comparison of Methodologies . . . 59
Table 5.1 Input Sets . . . 69
Table 5.2 Input Data . . . 69
Table 5.3 Costs and Penalties . . . 69
Table 5.4 Variables . . . 70
Table 5.5 Arc Set for Weekly Subproblem . . . 72
Table 5.6 Description of Case Studies . . . 76
Table 5.7 Sensitivity to Loader Availability . . . 78
Table 5.8 Computational Impact of Synchronization and Interior Point Stabiliza-tion . . . 81
LIST OF FIGURES
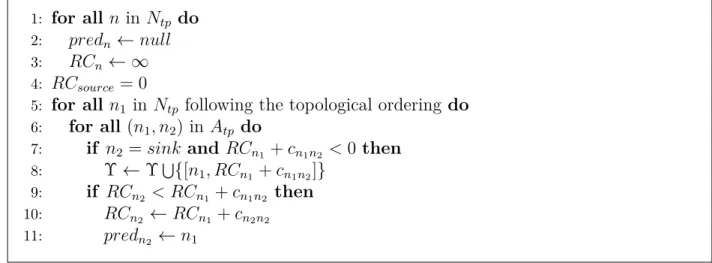
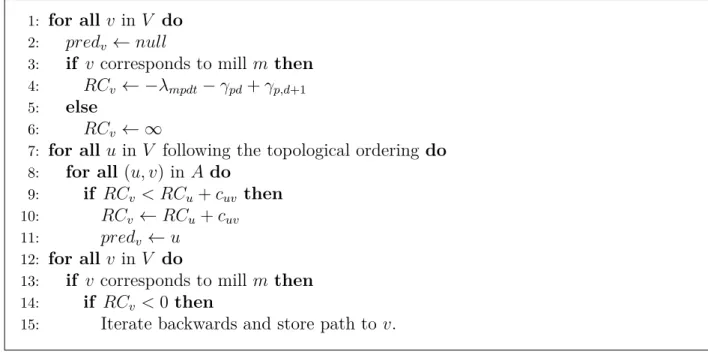
Figure 2.1 The different supply chains of the forest products industry (D’Amours et al., 2008, Figure 1) . . . 14 Figure 3.1 Shortest Path Algorithm for Routing Subproblem . . . 37 Figure 4.1 Shortest Path Algorithm for Routing and Scheduling Subproblem . . 55 Figure 4.2 Objective function component costs per case study . . . 60 Figure 4.3 Inventory at mills and forest roadside in an industrial problem . . . . 60 Figure 5.1 Shortest Path Algorithm for Weekly Routing and Scheduling Subproblem 74 Figure 5.2 Demand Attainment vs Average Loader Utilization . . . 79 Figure 5.3 Backhaul Savings vs Average Loader Utilization . . . 79
LIST OF ABBREVIATIONS AND ACRONYMS
BPP Bin Packing Problem CP Constraint Programming
CVRP Capacitated Vehicle Routing Problem
DP Dynamic Programming
DSS Decision Support System
ESPPRC Elementary Shortest Path Problem with Resource Constraints FIFO First In First Out
GRASP Greedy Randomized Adaptive Search Procedure HVRP Heterogeneous Vehicle Routing Problem
IPS Interior Point Stabilization IRP Inventory Routing Problem
IRPPD Inventory Routing Problem with Pickups and Deliveries LP Linear Program
LTSP Log Truck Scheduling Problem
MDVRP Multi-Depot Vehicle Routing Problem MILP Mixed Integer Linear Program
OR Operations Research
PDP Pickup and Delivery Problem PRP Production Routing Problem
SDVRP Split Delivery Vehicle Routing Problem SLTSP Synchronized Log Truck Scheduling Problem SPPRC Shortest Path Problem with Resource Constraints TSP Traveling Salesman Problem
VRP Vehicle Routing Problem
VRPMS Vehicle Routing Problem with Multiple Synchronization Constraints VRPPD Vehicle Routing Problem with Pickups and Deliveries
VRPTT Vehicle Routing Problem with Trailers and Transshipments VRPTW Vehicle Routing Problem with Time Windows
N P Non-Deterministic Polynomial Time R Set of Real Numbers
R≥0 Set of Non-Negative Real Numbers Z Set of Integers
Z≥0 Set of Non-Negative Integers
CHAPTER 1
INTRODUCTION
1.1 Preliminaries
Canada is a country rich in natural resources, and our economy is reliant on resource-based industries such as fisheries, forestry, agriculture and mining. With approximately 400 million hectares of forest and other wooded land, the forestry industry in particular plays a large role; in 2012 it contributed 19 billion dollars to national GDP and directly created 235,900 jobs (Natural Resources Canada).
In recent years, the forestry industry has been adapting to new challenges including a worldwide economic downturn, a strengthening Canadian dollar relative to key competing nations, and a significant decline in newsprint demand. Therefore innovation in products and processes is vital to long term competitiveness. Within this industry, supply chain planning has received much focus in recent years; forest product supply chains create massive networks over which the wood fiber flows and is transformed into consumer products. This has necessitated the development of many operations research (OR) methodologies and decision support systems (DSSs) to resolve these problems, reducing costs and environmental footprint at every step.
We consider the wood procurement supply chain, in which wood is harvested in the forest and transported (usually by truck) to mills and intermediate storage locations. The wood is produced and delivered subject to demands of timber of many different characteristics such as species, length, diameter, quality, and freshness. The volumes of timber that must be transported are very large: in 2011, harvested volumes of roundwood in Canada cumulated 146.7 million cubic meters (Canadian Council of Forest Ministers). These volumes must be transported over very large distances, especially in a country with the geographical attributes of Canada. Therefore transportation costs represent a massive expense to the Canadian forest sector, and this thesis is focused on primarily reducing these costs.
The problem definitions in this supply chain differ by planning horizon. The forestry industry planning hierarchy is typically decomposed into strategic, tactical, and operational problems. In this thesis, we consider tactical planning (in which wood flow and inventory decisions are typically linked with harvest scheduling) and the operational planning (in which detailed driver and loader schedules are created). In the latter case, this is commonly referred to as a log-truck scheduling problem (LTSP).
This necessitates the integration of production and inventory planning, vehicle routing and scheduling, and loader scheduling. For clarification, vehicle routing refers to the order of pickups and deliveries each vehicle makes to form a geographical route, whereas vehicle scheduling determines the exact time of each of these pickups and deliveries. The vehicle and loader scheduling in particular provide a challenge specific to the forest products sector. While the field of vehicle routing problems (VRPs) has seen much focus from an OR perspective for many decades, the literature on problems that include synchronization constraints between vehicles and other equipment (in this case a crane that loads and unloads the trucks) has been much more sparse. The existence of these constraints creates much more difficult problems to solve; hence providing tight optimality gaps on problems of practical size is not possible, and rather the goal is to provide quality solutions to industry decision makers in a reasonable time frame.
Through collaboration with these decision makers, three problem formulations were de-veloped to manage transportation planning with different goals and side constraints that vary based on planning horizon and the objectives and practices of the companies. In the following chapters, we detail the problem definitions, mixed integer linear program (MILP) formulations, solution methodologies, and results and savings obtained.
1.1.1 FPInnovations
FPInnovations is a private, non-profit forest research centre that was created in 2007 through a merger of Forintek Canada Corporation, the Forest Engineering Reearch Institute of Canada (FERIC), the Pulp and Paper Research Institute of Canada (Paprican), and the Canadian Wood Fibre Centre. Its mission is to facilitate ongoing forest sector renewal through the development of scientific and technical solutions, through collaboration with members in the private sector and partners in academia and government.
The Value Maximization and Decision Support (VMDS) research group of FPInnovations helps member companies generate more value by implementing value chain concepts and developing decision support tools driven by market needs. It is through collaboration with this group that the direction of this thesis has been guided, developing DSSs for use with member companies based on their varying needs and constraints.
1.2 Organization of the Thesis
In Chapter 2, we provide a comprehensive literature review. We survey VRP and in-ventory routing problem (IRP) literature, covering formulations that share attributes with the problems studied in this thesis. We follow this with a review of column generation and
branch-and-price procedures in vehicle routing problems, illustrated with an application to a capacitated vehicle routing problem (CVRP). Finally, we survey OR in the forest products industry, based in the context of the wood supply chain of harvesting, inventory management, and transportation.
Chapters 3 through 5 form the body of this thesis: the three articles that have been produced over the course of these doctoral studies. Chapter 3 presents A
Transportation-Driven Approach to Annual Harvest Planning, which has been submitted for publication to
the special issue Advances in Transportation and Logistics of Transportation Research Part
C: Emerging Technologies. Chapter 4 presents A Column Generation Algorithm for Tactical Timber Transportation Planning, which has been accepted for publication in the Journal of the Operational Research Society (Rix et al., 2015). Chapter 5 presents Dock and Driver Scheduling in a Timber Transport Supply Chain, which has been submitted for publication
to Computers & Operations Research. Finally, Chapter 6 provides a general discussion and Chapter 7 concludes the thesis.
CHAPTER 2
LITERATURE REVIEW
In this chapter we provide an extensive literature review. First, we give a survey of VRPs and solution approaches that share attributes with the problems that we examine in this thesis. Following this, we examine the current state of transportation-based methodologies and DSSs that have been developed for use in the forest products sector.
2.1 Related Vehicle Routing Problems
In this section we survey closely related problems to the ones encountered in this thesis. We then give a more detailed summary of column generation techniques in this field. For illustrative purposes, we outline a branch-and-price procedure on the CVRP, which will introduce modeling and methodological techniques used in this thesis.
2.1.1 Vehicle Routing Problems
VRPs arise as important problems with many industrial applications in transportation, distribution, and logistics. In the VRP, the goal is to serve a set of client locations, each exactly once, with a fleet of vehicles delivering a commodity. Each vehicle route originates and terminates at a depot location, and the objective is to minimize total traveling cost. The VRP is known to be N P-hard as even its simplest form, the traveling salesman problem (TSP) with a single vehicle, is N P-hard (Garey and Johnson, 1979).
VRPs that arise in practice are usually defined under route length and vehicle capacity restrictions. In the case of a homogeneous vehicle fleet, each of which has a limited capacity of the commodity being delivered to the clients, this is commonly referred to as the CVRP. This problem was first formally introduced by Dantzig and Ramser (1959), who gave a MILP representation of the problem. Literature on the VRP and CVRP is vast in both exact and heuristic methods; for more detailed surveys we direct the reader to Toth and Vigo (2001) and Laporte (2009).
Heuristic methods fall into several classes. We first mention constructive, or one-phase, heuristics that build a solution by iteratively expanding a partial solution. One classic one-phase heuristic for the CVRP was proposed by Clarke and Wright (1964). This savings heuristic ranks client pairs according to the realized savings from visiting the customers consecutively rather than in separate routes. This ranking is then used to modify a
solu-tion by merging routes in order to maximize the incidence of these client pairs. Two-phase heuristics decompose the problem into two distinct subproblems; cluster-first route-second decompositions are the most common (Bramel and Simchi-Levi, 1995).
One and two-phase heuristics tend to converge to a local optimum and hence may not reach the global optimum. For this reason, the use of metaheuristics that allow for deteri-oration of the objective function during expldeteri-oration of the solution space is commonplace. Gendreau et al. (1994) developed TABUROUTE to resolve the CVRP; this uses the tabu search heuristic (Glover and Laguna, 1999) in which a tabu list is maintained in order to prevent cycling. Pisinger and Ropke (2007) present an adaptive large neighborhood search heuristic, using a set of destroy and repair methods to explore the solution space while si-multaneously tracking the performance of each method in order to best guide the search. Cordeau et al. (2005) provide a computational comparison of many of the more popular CVRP heuristics.
Many exact methods for the CVRP are based on the formulation of Dantzig and Ramser (1959). Valid inequalities and separation algorithms have been proposed by several authors (Letchford et al., 2002; Lysgaard et al., 2004) and integrated into branch-and-cut algorithms. However these branch-and-cut methods do not scale well to larger problem instances. Many authors have opted to use branch-and-price approaches that take advantage of a stronger set partitioning formulation, first derived by Balinski and Quandt (1964), though it comes at the expense of an exponential number of variables. Fukasawa et al. (2006) and Baldacci et al. (2008) provide branch-and-cut-and-price procedures that take advantage of both methods.
There are many variations of the VRP and CVRP, with a wide array of formulations and constraints that can be added in nearly any combination; we identify several of the most common that can be considered. A natural extension of the VRP is the multi-depot vehicle routing problem (MDVRP), in which vehicles are routed from a set of facilities rather than solely one. With each facility is associated a capacity representing the maximum amount of commodity that can be served from the facility, and both vehicle and facility capacities must be respected in a solution. In general, this problem is much more difficult than the VRP. Baldacci and Mingozzi (2009) presented a unified framework for modeling and solving several classes of vehicle routing problems, including the MDVRP. The authors provide a set-partitioning formulation of the MDVRP, and solve it via branch-and-cut-and-price. Cordeau et al. (1997) solved the MDVRP with a tabu search heuristic.
Heterogeneous vehicle fleets are common in many industries, in which vehicles can have various capacities, fixed costs, and variable costs. Golden et al. (1984) first introduced the heterogeneous vehicle routing problem (HVRP), and most work since has been based on heuristic methods, such as the tabu search method of Gendreau et al. (1999). Choi and Tcha
(2007) solved this problem with column generation using several dynamic programming (DP) schemes for the subproblem, and on termination of the column generation found an integer feasible solution by solving a MILP.
In the vehicle routing problem with time windows (VRPTW), an additional constraint is imposed representing that each client must be visited during a specific time interval. A vehicle can wait in the case of early arrival, but late arrival is forbidden. This problem is very well studied in the literature, and Baldacci et al. (2012) provide a recent survey on exact methods. The most effective methods are based on branch-and-price, first implemented on this problem by Desrochers et al. (1992). Many heuristic methods have also been studied, including tabu search (Cordeau et al., 2001) and a branch-and-price based large neighborhood search (Prescott-Gagnon et al., 2009). Kontoravdis and Bard (1995) implemented a greedy randomized adaptive search procedure (GRASP) procedure, in which a simple deterministic greedy algorithm has randomization added in order to diversify the search.
In most VRPs, the assumption is that demand of each client is less than or equal to the capacity of a single vehicle. In many contexts, this is not the case and when it is necessary to visit a client more than once, we must relax this single visit requirement. Dror and Trudeau (1990) defined the split delivery vehicle routing problem (SDVRP), proposed a local search heuristic, and showed how the savings resulting from an SDVRP formulation compared to a VRP formulation grow significantly as client demand size grows relative to vehicle capacity. An MILP formulation is given by by Dror et al. (1994). Ho and Haugland (2004) propose an effective tabu search heuristic for the time window variant of the SDVRP.
One very well-studied class of VRP is the pickup and delivery problem (PDP), in which objects or people have to be transported between origins and destinations. Berbeglia et al. (2007) survey the PDP and provide a classification scheme. The authors distinguish between three structures of PDP based upon the number of origins and destinations of the commod-oties: one-to-many-to-one, many-to-many, and one-to-one. In one-to-many-to-one problems, commodoties are delivered from the depot to the clients and/or from the clients to the de-pot. In the many-to-many problems, any location can be a source or destination for any commodity. In one-to-one problems, each commodity has a fixed origin and fixed destina-tion. One-to-one problems are sometimes referred to as vehicle routing problems with pickups and deliveries (VRPPDs), and have many applications such as door-to-door transportation services (Cordeau and Laporte, 2007).
Ropke et al. (2007) formulated the time window variant of the VRPPD, and resolved it via branch-and-cut. Xu et al. (2003) also considered a time window variant of the VRPPD with a heterogeneous vehicle fleet, defining multiple time windows for each pickup and delivery point. A set partitioning formulation was proposed and hence a column generation algorithm
was used to resolve the problem. Many heuristics have also been used on this problem: Bent and Van Hentenryck (2006) gave a two stage heuristic in which simulated annealing is used to reduce the number of vehicles, following which large neighborhood search is used to minimize travel costs.
2.1.2 Inventory Routing Problems
When vehicle routing decisions must be solved concurrently with inventory decisions at client locations, usually in the context of vendor managed inventory resupply policies, we refer to this VRP extension as the IRP. This is very different from the VRP as the supplier is the one responsible for satisfying the client orders, operating under the constraint that clients do not run out of product. Moreover, it is modeled over a multi-period time horizon, with inventory managed between periods. Bell et al. (1983) gave a first application of this problem in the management of industrial gases.
Coelho et al. (2013) give a recent survey and classify the current IRP literature according to a number of criteria, a few of which we will discuss. While the majority of IRPs considered in literature deal with a homogeneous vehicle fleet, or in many cases a single vehicle, het-erogeneous vehicle fleets have been considered. Additionally, IRPs typically operate under one of two inventory policies. Under a maximum level policy, replenishment level is flexibile but must satisfy upper and lower bounds. On the other hand, an order-up-to policy is one in which immediate replenishment up to the upper bound is required when the level falls to the predetermined lower bound. In both cases, it is possible to allow for stockout (negative inventory) at penalty.
Coelho and Laporte (2012) formulated the IRP, and gave a branch-and-cut procedure for its resolution. Exact methods such as this can generally solve within reasonable time instances up to 25 customers, 3 periods, and 3 vehicles; beyond which gap sizes are rather large. Desaulniers et al. (2014) gave a branch-and-price-and-cut methodology that was able to solve to optimality additional benchmark instances.
Coelho et al. (2013) further classify three basic problem structures: one, one-to-many, and many-to-many. The many-to-many IRP is a less-studied variant; Ramkumar et al. (2012) considered a many-to-many problem involving multiple commodities and give a MILP formulation. A column generation based approach was also been successfully applied to a many-to-many IRP in maritime logistics (Christiansen and Nygreen, 2005).
Michel and Vanderbeck (2012) consider a two-phase approach. In a tactical planning phase, they minimize a rough measure of routing cost by assigning clients to vehicles, while the routing is saved for an operational planning phase. A branch-and-price-and-cut heuristic is used to resolve the problem. Van Anholt et al. (2013) introduced the inventory routing
problem with pickups and deliveries (IRPPD) in the context of replenishment of automated teller machines, and used a branch-and-cut algorithm to resolve the problem. The IRPPD combines the features of the IRP and the PDP.
It is natural to think that integrating further elements of the supply chain can lead to even better performance, and Chandra and Fisher (1994) were among the first to include production decisions within the IRP, producing operating cost reductions from 3 to 20%. This problem is classified as the production routing problem (PRP). Adulyasak et al. (2013) gave strong formulations of this problem in the multi-vehicle context, and solved with an adaptive large neighborhood search heuristic to find initial solutions, followed by a branch-and-cut procedure. Other recent methodological focuses in this field have included tabu search (Bard and Nananukul, 2009) and branch-and-price (Bard and Nananukul, 2010).
2.1.3 Synchronization in Vehicle Routing
In most variants of the VRP, including the ones referenced thus far in this chapter, ve-hicles are mutually independent. That is, a change in one vehicle route does not affect any other vehicle route; however in many contexts this is not the case. A classic example is the vehicle routing problem with trailers and transshipments (VRPTT) (Drexl, 2013), in which non-autonomous vehicles (trailers) can move only when accompanied by other vehicles. Bred-ström and Rönnqvist (2008) formulate a VRP with temporal precedence and synchronization constraints, with applications in several fields including homecare staff scheduling (two nurses must visit patients at the same time for lifting purposes or with fixed offset to give medicine after a meal) and airline scheduling (a coded flight must depart at the same time each day). Salazar-Aguilar et al. (2012) present a synchronized arc routing problem for snow plowing operations, in which vehicle routes are designed so that street segments with multiple lanes of the same orientation are plowed simultaneously by multiple vehicles.
Drexl (2012) provides a survey and classification scheme for the vehicle routing problem with multiple synchronization constraints (VRPMS), and distinguish between several types of synchronization. We primarily focus on resource synchronization: defined by the authors as
At any point in time, the total utilization or consumption of a specified resource between all vehicles must be less than or equal to a specified limit.
The inclusion of resource synchronization constraints in vehicle routing is a relatively new field of research, and the literature to date very sparse. Hempsch and Irnich (2008) introduced resource synchronization (under the definition “intertour resource constraints”) in order to model a restricted number of docking stations at a destination depot. They gave a local
search heuristic to solve the problem. Ebben et al. (2005) gave an application in an auto-mated transport system for autoauto-mated guided vehicles at an airport. The resources in the formulation are vehicles, docks for (un)loading, parking spots, and cargo storage. Discrete event simulation was used in the problem resolution.
2.1.4 Branch-and-Price for Vehicle Routing Problems
In this section we provide in further detail a branch-and-price procedure that can be applied to the problems described thus far in this literature review. Column generation is an efficient algorithm for solving large linear problems; that is, linear programs whose variable sets are too large to practically construct and store. When a column generation procedure is embedded into a branch-and-bound search tree, this is referred to as branch-and-price (Barnhart et al., 1998). Branch-and-price is a widely used technique in classic problems such as vehicle routing, crew scheduling, and facility location. Desaulniers et al. (2005) give a detailed description and walk through a number of applications.
Mathematical Formulations for the Capacitated Vehicle Routing Problem
As a compact example, consider again the CVRP. We give an explicit definition on an undirected graph G = (V, E), where V = {0, 1, . . . , n} is a set of n + 1 vertices. Vertex 0 defines the depot and the remaining vertices represent n clients. Let qi be the demand of
each client i (q0 = 0). A set of m homogeneous vehicles of capacity Q is based at the depot. Each edge e is associated with a cost ce of traversal.
To formulate the CVRP as a MILP, we use the formulation of Laporte et al. (1985), in which decision variables xe define the number of times edge e is traversed in a solution.
Additionally, we define δ(S) to be the cutset of subset S ⊆ V , that is, δ(S) = {(i, j) ∈ E :
i ∈ S, j /∈ S}. We denote by (VF) the two-index vehicle flow formulation below.
(VF) minX
e∈E
subject to X e∈δ({i}) xe = 2, ∀i ∈ V \{0}, (2.2) X e∈δ({S}) xe ≥ 2k(S), ∀S ⊆ V \{0}, |S| ≥ 2, (2.3) X e∈δ({0}) xe = 2m, (2.4) xe ∈ {0, 1, 2}, ∀e ∈ δ({0}), (2.5) xe ∈ {0, 1}, ∀e ∈ E\δ({0}), (2.6) where k(S) = d P i∈Sq(S)
Q e, though this bound can potentially be tightened by solving a bin
packing problem (BPP), which is N P-hard. The objective function (2.1) is the minimization of total cost. Constraints (2.2) are degree constraints forcing each client to be visited exactly once. Constraints (2.3) are capacity and subtour elimination constraints which impose at least k(S) vehicles must enter and leave S. Constraints (2.4) fix the number of vehicles to
m, and constraints (2.5) and (2.6) are integrality constraints. As a clarification, xe = 2 if
and only if a vehicle route serves only a single client before returning to the depot.
Balinski and Quandt (1964) were the first to propose a set partitioning formulation for the CVRP. Let R denote the set of all feasible vehicle routes. Each route is associated with a cost cr, and we define the binary matrix A = (air) where air = 1 if and only if client i is
visited in route r. We then let yr be a boolean variable specifying whether or not route r is
selected in the solution. The set partitioning formulation is defined below, and we denote it (SP). (SP) minX r∈R cryr (2.7) subject to X r∈R airyr= 1, ∀i ∈ V \{0}, (2.8) X r∈R yr= m, (2.9) yr∈ {0, 1}, ∀r ∈ R. (2.10)
The objective function (2.7) is again the minimization of total cost. Constraints (2.8) force each customer to be visited exactly once, and constraints (2.9) require m vehicles to be used. Constraints (2.10) are integrality constraints.
Applying Column Generation to the Linear Relaxation
The motivation for using branch-and-price to solve the CVRP is that the linear relaxation of the two-index vehicle flow formulation (VF) is very weak relative to that of formulation (SP) (Bramel and Simchi-Levi, 1997). Specifically, any solution y to the linear relaxation of (SP) can be transformed into a relaxed solution x to (VF), but the converse is not true. Hence using formulation (SP) is preferable; however, as the size of the variable set R grows exponentially with the problem size, it is impractical to construct and store. A column generation procedure will start with a partial set R0 that will be enriched iteratively by solving a subproblem. We refer to the relaxation of (SP) as the master problem.
To enrich R0 it is necessary to uncover new routes that offer a better way to visit the clients. This is the case if the new route has a negative reduced cost. The reduced cost of a route is calculated by replacing the cost of each edge cij with its reduced cost ˆcij = cij − λi,
where λi is the dual value associated with the constraint (2.8) for client i. Hence a negative
reduced cost route is a route in which the sum of the dual values is more than the costs of the traveled edges. If no routes outside of R0 with a negative reduced cost exist, then it suffices to solve the linear program with only the pool R0 to yield an optimal solution. A column generation procedure will therefore iterate between solving the master problem and subproblem until no more negative reduced cost routes remain; at this point the master problem can be solved to optimality.
Solving the Subproblem
To find a negative reduced cost route to add to the set partitioning formulation above, one can solve an elementary shortest path problem with resource constraints (ESPPRC). That is, one must find an elementary (cycle-free) path from the depot to the depot that both satisfies capacity constraints and has a negative reduced cost. As arc costs (and thus cycle costs) can be negative, elementarity is not trivially fulfilled in this case. This makes the subproblem N P-hard. However, effective techniques have been generated to solve this problem. Feillet et al. (2004) show how this can be solved exactly with DP using a label correcting algorithm. However, this problem is usually solved heuristically; for example Desaulniers et al. (2008) introduced a tabu search heuristic. Another interesting heuristic is to instead solve a 2-cyc-SPPRC, in which only cycles of length 2 are forbidden. This problem can be solved in pseudo-polynomial time.
As we will see in later chapters, the formulations studied in this thesis do not have elementarity restrictions. Therefore it suffices to solve an SPPRC, in which polynomial time label correcting algorithms can be used under certain conditons (Cormen et al., 1990).
Stability Problems
Any column generation procedure is heavily dependent on the marginal costs (dual values) to guide the search of the subproblem. However, these values may be poorly estimated, especially early in the search. Neame (1999) provides a detailed discussion on this topic.
A first stabilization approach is to move from a set partitioning (SP) to a set covering formulation. This is more effective because in a set partitioning formulation, it is possible to have negative dual values associated with the partitioning constraints (2.8), which is problematic as visiting a client can have negative value in the subproblem. Therefore the equality in the constraint is replaced with a non-strict greater-than inequality; we define this new problem (SC).
However, dual values can still be poorly estimated due to the relaxation of (SC) being degenerate; hence the dual problem has an infinite number of optimal solutions. If an extreme point of the dual polyhedron is returned, as is common when retrieving dual values in most linear program (LP) solvers, this will yield very large dual values for some constraints and values of zero for others; in a CVRP setting this means very high benefit for visitng some clients and no benefit for others. A better approach would be to take a dual solution from the interior of the dual polyhedron. Bixby et al. (1992) give an interior point method for solving LPs; unfortunately iterations are slower than using a simplex based method and as interior point methods can not be warm started, they do not take advantage of the iterative procedure of column generation.
Other stabilization approaches have been widely used, such as the box-pen method pro-posed by Du Merle et al. (1999). Interior point stabilization (IPS) (Rousseau et al., 2007) is another technique, in which the LP is solved multiple times with minor modifications in order to retrieve multiple extreme dual solutions, of which a convex combination is then taken. Branching Scheme
Upon solving the linear relaxation of the set covering formulation (SC) to optimality with column generation, if the resulting solution is integer feasible, it will be the optimal solution to the MILP. However, this is unlikely to be the case and therefore the column generation procedure must be implemented into a branch-and-bound tree in order to solve the MILP exactly.
While the most intuitive branching decisions would be on the variables yr, this is
prob-lematic for a number of reasons. First, this significantly modifies the subproblem. While imposing yr= 1 is easy (the visited clients are removed from the problem), imposing yr = 0
cost routes to add to the master to guarantee the existence of a new route. This will continue to increase by 1 every time a route is forbidden, which can be very inefficient. Second, this type of branching creates an imbalanced search tree: yr = 1 is very strong but yr = 0 has a
very minimal impact on the size of the feasible space.
A more common approach is to instead branch on the variables of the formulation (VF). That is, an edge e = (i, j) is chosen such that the summation of all variables yr representing
routes r that traverse that edge is fractional. This summation (which is equivalent to variable
xe) is then branched on. These restrictions are easily added to the subproblem by removing
the appropriate edges to either restrict or force traversal of edge e in the solution.
Resolving a problem through an exact branch-and-price method can be very time consum-ing, and is only practical on small problem instances. Often, branch-and-price methodologies are used heuristically in order to generate quality solutions under a reasonable time limit. For example, Choi and Tcha (2007) could only solve HVRP cases with up to 20 clients exactly; hence they used the basic heuristic of solving the LP relaxation to optimality, restoring in-tegrality to the necessary variables, and solving the resulting MILP with branch-and-bound and the restricted set of columns generated to that point. This same heuristic was used by Xu et al. (2003) on their PDP with multiple time windows. We also mention the large neigh-borhood search based branch-and-price algorithm of Prescott-Gagnon et al. (2009) applied to the vehicle routing problem with time windows. In this case, the route variables yr are
branched on, but they are only fixed to value 1 with no backtracking.
2.2 Operations Research in the Forest Products Industry
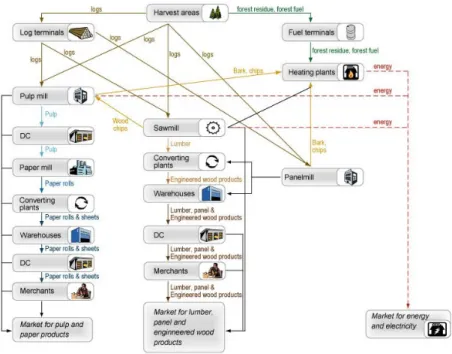
Within the forest products industry, D’Amours et al. (2008) present an overview of dif-ferent supply chain planning problems and review the contributions in an OR setting. The product flow of the supply chain is shown in Figure 2.1. The authors distinguish between the strategic, tactical, and operational planning levels. Supply chain planning in this industry is especially difficult, with a hierarchy that can be difficult to classify, since planning horizons can range from well over 100 years to seconds. As a general rule, strategic planning is defined as problems with time horizons greater than 5 years, tactical problems have horizons between 6 months and 5 years, and operational problems have horizons of less than 6 months. These definitions, of course, vary between companies and their decision makers.
While operational problems such as board cutting and truck dispatching must be solved in minutes or even seconds, strategic and tactical problems can be solved over a period of up to several hours (Rönnqvist, 2003). For this reason, while heuristics, meta-heuristics and network methods are generally used in operations planning, mixed integer linear programming
Figure 2.1 The different supply chains of the forest products industry (D’Amours et al., 2008, Figure 1)
and stochastic programming based methods are often used to solve tactical and strategic problems.
Forest product supply chains create massive networks over which the wood fiber flows and is transformed into consumer products. These transformations are many-to-many processes, which take a set of input products and produce a set of output products, and many times decisions must be made on the transformation to use. These decisions can range from a recipe at a pulp and paper mill to a cutting pattern to use on a harvested tree in the forest. This thesis is set in the context of the wood procurement supply chain, starting in the forest. First, a harvest team will cut the trees, remove the branches, and buck the tree into logs classified by species, length, diameter and quality. These are then transported, usually by truck but train and barge are also used, to mills or to intermediate storage locations. A log loader with operator must usually be present to load and unload trucks, though some trucks are equipped with their own cranes and most mills have permanent equipment on site. The transport companies that deliver these harvested logs may also use their trucks and drivers to deliver other products in the supply chain; for example multi-product trailers can additionally be used to haul wood chips from a sawmill to a pulp and paper mill.
We present in the rest of this section the types of problems encountered in wood pro-curement planning, and the OR methodologies that have been implemented to solve these
problems. We will also focus on DSS implementations of these methodologies that have been developed for industrial use.
2.2.1 Harvest Scheduling
Tactical models in forest management are commonly used to decide where and when to harvest, which team to use in each harvest decision made, and where and when to transport and store the harvested timber. These plans are made up to 5 years in advance, but are often re-evaluated annually when doing budget projections for the following year. Rönnqvist (2003) gives a simple MILP model incorporating these decisions in which the objective function measures two costs: the cost of harvesting a forest area by a team in a specific period, and the cost of delivering each unit of wood from a forest site to a mill. Epstein et al. (2007a) and Gémieux (2009) give recent surveys on OR applications to harvest operations.
Beaudoin et al. (2007) derive an MILP to support the tactical wood-procurement decisions of a multi-facility company. This formulation considers wood freshness and quality with respect to the age of harvested wood. The objective is to maximize company profits, with market prices appearing as a function of supply volume, freshness and market conditions. The authors utilize a multi-criteria decision making process which achieves an average profitability increase of 8.8% relative to solving a deterministic model using average parameter values.
Karlsson et al. (2004) consider an annual harvest planning problem that arises in Sweden, in which inventory management and road openings and closings must be managed. To solve the MILP model, they use a variable fixing heuristic in which they iteratively solve LP relaxations, at each iteration fixing binary variables with a fractional value in chronological order until a feasible solution is found.
Bredström et al. (2010) consider a tactical problem in which machines must be scheduled to plan the harvest, and also include the minimization of their movement in the objective function. They do not, however, include transportation or inventory costs of the timber. They use a two-phase approach in which they first assign machines to forest locations, and then schedule each machine to minimize their moving costs.
In the tactical model of Bajgiran et al. (2014), the harvesting and procurement are sched-uled in tandem with production, distribution and sales decisions, with an objective of maxi-mizing total profit. They do not schedule harvest teams or equipment, but instead sequence the harvest of available forest areas. They formulate an MILP and develop a Lagrangian relaxation based heuristic with which to resolve the problem.
Similar models appear in planning over a shorter time horizon, including more operational details to increase efficiency. Karlsson et al. (2003) consider a harvest planning model over a period of 4 to 6 weeks, in which harvest teams are scheduled, transportation and inventory
are managed, and additionally the management and maintenance of roads must be considered to yield a feasible solution.
Mitchell (2004) gives a very detailed description of operational harvest scheduling in the Australian and New Zealand context. Road maintenance and management are not consid-ered in this model; however a key term of their objective is to maximize profitability by incorporating the revenue associated with each potential log type produced. They use a branch-and-price scheme by pricing variables that represent harvest crew schedules via DP. Epstein et al. (1999) present OPTICORT, created for use in the Chilean forest sector. They additionally include machine assignment and bucking decisions in a short term (3 months) harvesting model. OPTICORT uses a MILP model, solved by column generation.
Gerasimov et al. (2013) integrate harvesting and transportation decisions into a single DSS for use in the Russian forestry sector. On an extensive transportation network, improving paths are generated heuristically and used to influence the routing of both harvest teams and trucks, solved via a DP algorithm. Potential cost savings of 14 to 25% were reported. 2.2.2 Transportation
At the tactical level of wood procurement planning, little emphasis is placed on portation. Along with the upgrade of transportation infrastructures and adjustment of trans-portation equipment capacity, volume allocations from supply points to demand points are often decided. When formulating annual plans, the total cost of wood flow from forest sites to mills is minimized based on out-and-back travel distance, with more detailed transporta-tion plans determined at the operatransporta-tional level. As detailed in the previous sectransporta-tion, they are typically incorporated in harvest planning models (Rönnqvist, 2003).
At the operational level, more detailed transportation plans are determined in which vehicle routes are constructed under the objective of minimizing transportation costs. When necessary, synchronization with loaders at supply and demand points are scheduled and queuing times are minimized. In the forestry industry, the problem of creating these plans is commonly called the LTSP.
The LTSP is a generalization of the aforementioned PDP or, in a multi-period planning context in which inventory must be managed at the daily or weekly level, the IRPPD. The underlying structure is often that of a many-to-many PDP, in the case where any supply vertex can satisfy any demand of the given product. Thus geographic allocation decisions must be decided in the planning. However in many contexts, and often the case in Canada, there are contractual obligations arising from timber auctions in which the pairings of supply to demand are fixed. Hence this defines a PDP of a one-to-one structure. A common solution procedure for many-to-many problems is to decompose the problem in two phases: the first
solves the allocation and derives a one-to-one PDP; the second solves the resulting PDP. The LTSP also differs from more classic PDP applications that arise in the literature based on several key criteria. First, harvest volumes of timber usually are much larger than in other industries: much larger than the volume of a single truck. This necessitates many trips to the same client vertices, as in an SDVRP. Second, forestry companies generally do not employ a single homogeneous fleet of trucks. In fact, approximately 80% of the timber trucks in Canada belong to independent owner-operators (Audy et al., 2013). This leads to a very fragmented heterogeneity in the truck fleet: differing in terms of fixed and variable costs, capacity of each product, locations of the facility at which to start and end routes, driver shift lengths and potentially priorities, allowable operating areas, and the availability of an onboard loader. Hence these problems share attributes with the HVRP and MDVRP. Third, working hours for the loader operators at forest sites and mills explicity define time windows, as in a VRPTW, though these windows are generally not as tight as in other industries and some mills are in fact operating 24 hours per day. When planning over a horizon of greater than one day, multiple time windows can arise to account for daily changes in operating hours. Finally, synchronization between loaders and trucks is necessary in nearly all contexts (though trucks equipped with onboard loaders can arise as an exception), and hence the LTSP generalizes the VRPMS.
There is much literature devoted specifically to the LTSP, and for recent surveys we direct the reader to Epstein et al. (2007b) and Audy et al. (2012). We emphasize that throughout the literature, the exact problem definition changes with respect to the setting of the problem and the industrial objectives and constraints to be imposed. Heuristic methods and MILP techniques have both been applied to this problem, though we note that due to the complexity of the problem, solving it exactly in an MILP setting is not feasible for problems of a practical size.
The savings heuristic of Clarke and Wright (1964) was applied to the transportation in the forest sector by Gingras et al. (2007). Based on the volumes of products at supply points and their destinations, and the compatibility of truck configurations with the products, potential backhaul tours are generated and ranked according to their savings. This heuristic has been included in the control platform module FPInterface, under the name MaxTour. We note that this does not solve a full LTSP by assigning routes and schedules to trucks; however its solution has been used by industry decision makers to assist in manual routing and dispatching.
FlowOpt is a similar DSS to MaxTour, developed by the Forestry Research Institute of Sweden (Forsberg et al., 2005). It allocates volume from supply points to demand points via an LP solver, integrating transport from truck, train, and ship, calculating the savings
of backhaul tours. Frisk et al. (2010) describe an implementation with up to 8 companies in order to yield transportation savings through lumber exchanges, with savings of up to 12.8%. Beck and Sessions (2013) developed an ant colony optimization heuristic to solve a sim-ilar problem in wood chip transportation. They also used a flow-based formulation of the problem, with the additional constraint of adding fixed costs to road segments that must be cumulated to account for modifications that give each truck configuration access to the forest transportation network. Ant colony optimization (Dorigo et al., 2006) is based on the analogy of ants searching for food: ants leave behind a pheromone scent that influence other ants to take the path, and as more ants travel over the same path the scent increases.
Due to the success of the tabu search algorithm of Cordeau et al. (2001) on the VRPTW, it has been applied to LTSPs. In a one-to-one structure, Gronalt and Hirsch (2007) developed a regret heuristic to find an initial solution and then used tabu search to find improving solutions. Flisberg et al. (2009) operated in the context of a many-to-many structure, and solved the problem in 3 phases. First, an LP determined wood flows between supply and demand vertices, and then an MILP created full truckloads from these flows. Finally, an initial solution to the LTSP is generated heuristically and tabu search is applied to improve the solution. Rummukainen et al. (2009) used a similar problem decomposition, using tabu search to first create truckloads, then a MILP model to allocate truckloads from supply vertices to demand vertices. In the final phase, tabu search is again used to route the trucks. The methodology of Flisberg et al. (2009) has been included as the optimization procedure in the DSS RuttOpt (Andersson et al., 2008), designed by the Forestry Research Institute of Sweden, which was tested on case studies with up to 110 trucks and 3800 transport requests over 5 days. It is currently used to measure routing efficiency in an association of Swedish carriers, and to identify backhaul opportunities that arise from load exchanges between the carriers (Audy et al., 2012).
Moura and Scaraficci (2008) proposed a hybrid approach using GRASP and LP methods to solve a one-to-one LTSP with a homogeneous vehicle fleet. Simulated annealing is another commonly used heuristic for optimization problems, and was applied to the LTSP by McDon-ald et al. (2010). This method iteratively applies modifications to the current solution, and chooses to accept or discard the new solution with a probability based on its improvement or degradation of key performance indicators.
Bredström and Rönnqvist (2008) describe how the one-to-one LTSP is a derivation of their proposed VRP with temporal precedence and synchronization constraints, for which they derive a MILP formulation. This is first resolved directly with a commercial solver; second by means of a heuristic that iteratively assigns trucks to origin-destination pairs, and then reoptimizes a restricted MILP with these assignments fixed in order to improve the best
known solution.
VTM (Virtual Transportation Manager) was developed by researchers at FPInnovations and FORAC Research Consortium in Québec, Canada. The embedded optimization proce-dure heuristically builds routes and uses constraint programming (CP) to test their feasibility. Audy et al. (2013) describe the implementation and test on a case study in the Canadian context, reporting savings of 7-10%.
Branch-and-price based approaches have been applied to the LTSP; Carlsson and Rön-nqvist (2007) outline the implementation on a many-to-many problem with no vehicle fleet assumptions: the goal is to identify backhaul opportunities. Palmgren et al. (2003) consider a heterogeneous fleet and use a pre-generated pool of columns (vehicle routes), found by heuristic enumeration, from which to enrich the LP. They later extended this methodology (Palmgren et al., 2004) to use DP to solve a k-shortest path problem. In both cases integer feasible solutions were found heuristically. Rey et al. (2009) also used DP in the subproblem and, upon resolution of the LP relaxation, solved the MILP through branch-and-bound.
Many of the above contributions do add loader assignment variables to their problem formulation, for example assigning loaders on forest areas on a daily basis, then imposing the constraint that a loader must be present for a truck to load wood. This is a case of operation synchronization (Drexl, 2012). However, very few approaches seen in the literature model this as resource synchronization in the following manner: imposing precisely that a loader can only unload one truck at a time, which yields a much more difficult optimization problem. This can be a crucial aspect in practice, as it allows for minimization of queuing costs that arise when multiple trucks arrive to (un)load at the same time to the same loader. Weintraub et al. (1996) mention that in a traditional, manual management scheme that frequently loaders would be idle for a long time, following which many trucks would arrive simultaneously, leading to long queues. The authors describe the ASICAM (“Asignador des Camiones”) DSS, developed at the Universidad de Chile, that provides a working schedule of all trucks for the following day. This uses a simulation-based method that assigns loads to trucks on a moving time horizon, and hence derives an operating schedule for each loader. The authors report using the system on problems with up to 220 trucks, 40 origins, and 15 destinations, and compared to manual planning realized cost savings of 15-35% with additional qualitative improvements in schedules for drivers and loader operators.
El Hachemi et al. (2011) present a daily one-to-one LTSP, which uses linear program-ming for routing decisions (assigning flows to trucks) and CP for the scheduling decisions to synchronize with loaders. In addition to vehicle costs, they add to their objective the costs associated with each loader, based on the times of the first and last deliveries each day. The authors solve problems with up to 6 supply points, 5 demand points, 18 trucks, and a gross
volume of 70 truckloads.
El Hachemi et al. (2013) define a weekly many-to-many problem, which adds a preliminary phase of determining open forest areas and the set of one-to-one requests to perform each day. This first phase is solved with tabu search, and the seven daily problems can then be solved sequentially. For the daily problems, the authors use constraint-based local search (routing and scheduling) and CP (scheduling). This weekly LTSP was then extended to include depot locations for the trucks and mandatory driver lunch breaks (El Hachemi et al., 2014). The algorithm of the first phase used to derive the daily problems was reused from El Hachemi et al. (2013), and the daily problems were then modeled as MILPs and solved with a branch-and-bound solver. These methodologies were applied to case studies up to a size of 6 supply points, 5 demand points, 32 trucks, and a gross volume of 700 truckloads.
CHAPTER 3
ARTICLE 1: A TRANSPORTATION-DRIVEN APPROACH TO ANNUAL HARVEST PLANNING
Gregory Rix, Louis-Martin Rousseau, Gilles Pesant
Chapter Notes
The contents of this chapter were submitted for publication to the special issue Advances
in Transportation and Logistics of Transportation Research Part C: Emerging Technologies
on April 30, 2014. A technical report is available with the CIRRELT (Rix et al., 2014). Preliminary work was a finalist in the Otto Mass poster competition at the 1st Annual FIBRE Conference, and presented at the following conferences:
– 2012 Winter Meeting of the Canadian Mathematical Society – December 2012: Montréal, QC, Canada
– Optimization Days 2013
– May 2013: Montréal, QC, Canada – 1st Annual FIBRE Conference
– May 2013: Cornwall, ONT, Canada
– 55th Annual Conference of the Canadian Operational Research Society – June 2013: Vancouver, BC, Canada
– 8th Triennial Symposium on Transportation Analysis – June 2013: San Pedro de Atacama, Chile
– 15th Symposium for Systems Analysis in Forest Resources – August 2013: Québec, QC, Canada
Abstract
Supply chain planning in the forestry industry includes a wide range of decisions, with time horizons ranging from real-time operational problems to long-term strategic problems. When forest companies plan over a length of approximately one year, referred to as the tactical stage of planning, the decisions commonly made are the schedules of forest sites to be visited by harvest teams in order to produce enough volume to meet all demands over the horizon, and also the allocation of this volume to the different demand points. This allocation allows for an estimation of transportation costs, with more detailed routing and scheduling decisions left for operational planning.
The problem described in this article generalizes this tactical problem to include routing decisions, and hence falls into the classes of production routing problems and pickup and delivery problems. This formulation was motivated by an industrial partner, whose goal is to ensure that they have a reliable source of permanent fleet drivers. In order to do this, they must be able to guarantee a variety of different schedules to several trucking contractors whom they hire drivers from, and harvest team scheduling has been identified as more flexible in order to accommodate this requirement. Additionally, significant savings in transportation costs can arise from determining a plan that emphasizes the creation of backhaul opportunities of a heterogeneous set of products. We model this problem as a mixed integer linear program and develop an effective branch-and-price based heuristic capable of generating solutions to medium sized problems in reasonable execution time. Compared to a decomposed and sequential optimization scheme that more accurately represents current industry practice, this methodology is able to fulfil higher demand levels while decreasing transportation costs by an average of $1.41 per cubic meter, or 12.4%.
Keywords: Forestry, transportation, inventory-routing problem, pickup-and-delivery problem, integer programming, column generation