On learning matrices with orthogonal columns or disjoint supports
Texte intégral
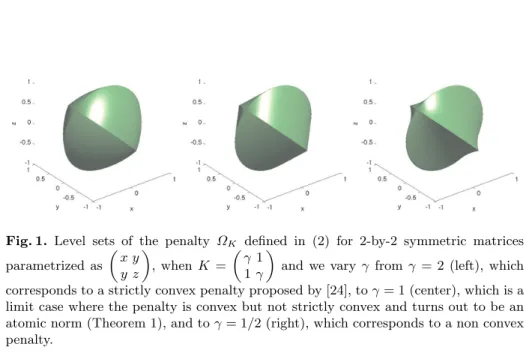
Figure
Documents relatifs
Hence, minimizing the total transmit power of the system under the user rate and antenna power limit constraints trans- lates into searching for the best “power transfer” scheme
This estimator is computed using a thresholding in an adapted orthogonal bandlet basis optimized for the noisy observed image.. In order to analyze the quadratic risk of this best
The decomposition on a ban- delet basis is computed using a wavelet filter bank followed by adaptive geometric orthogonal filters, that require O(N) operations.. The resulting
Such a principled method for addressing non-convexity consists in decomposing a non-convex objective function into the difference of convex functions, and then in solving the
Joint image reconstruction and PSF estimation is then performed within a Bayesian framework, using a variational algorithm to estimate the posterior distribution.. The image
This method, named MUS- CLE [1] for MUlti-channel Subspace-based Common poLe Estimation, has been applied to the biomedical signal analy- sis and is based on shift-invariance of
Ayant tir´ e un ´ echantillon d’une perle blanche et de trois perles noires d’une population de dix perles, quel est l’intervalle de confiance pour le nombre m de perles blanches
Finally, we derive in the general case partial generating functions, leading to another representation of the orthogonal polynomials, which also provides a complete generating
