The x-Wait-freedom Progress Condition
Texte intégral
Figure
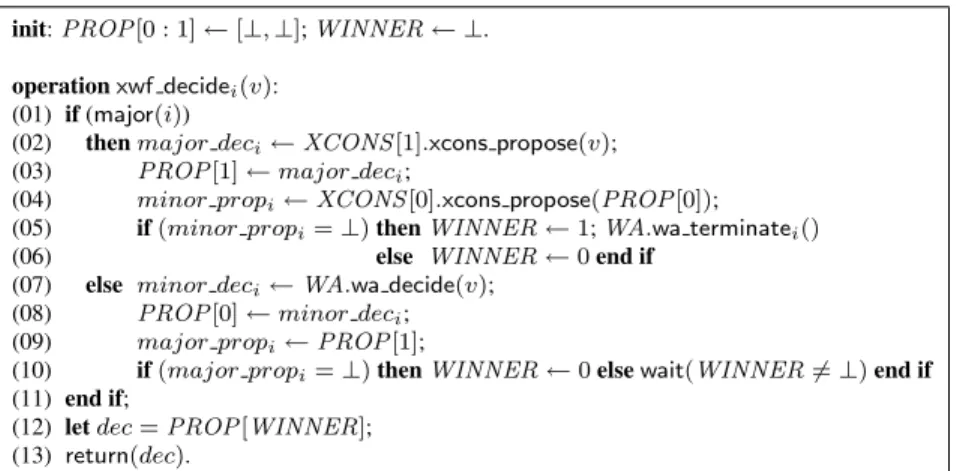
![Figure 1: An algorithm implementing the weak agreement type (variant of [3])](https://thumb-eu.123doks.com/thumbv2/123doknet/8314835.280196/6.918.220.692.764.1056/figure-algorithm-implementing-weak-agreement-type-variant.webp)

Documents relatifs
We define a partition of the set of integers k in the range [1, m−1] prime to m into two or three subsets, where one subset consists of those integers k which are < m/2,
Keywords— Prognostics and Health Management, Condition- Based Maintenance, maintenance optimization, decision under uncertainty, Value of Information, gamma
N0 alternatives from which to choose. And if something is infinitely divisible, then the operation of halving it or halving some part of it can be performed infinitely often.
Discourse and Pragmatic Markers from Latin to Romance languages, 237-260, 2014, which should be used for any reference to
In sum, our approach has used the order-theoretic character- ization of spectral spaces when the ambient topology on a poset is the left topology and an
Smooth boundaries will be in fact considered in [17], where we applyformula (11) to derive a recursive algorithm for the computation of the complete asymptotic series of the
• How does the proposed algorithm behave if the t faulty processes can exhibit a malicious behavior. ⋆ a malicious process can disseminate wrong
Porter's Value Chain, Business Model Ontology of Osterwalder and thereby business model innovation 5 , Verna Allee's Value Network Analysis, E3-Value analysis, Resources, Events,
