I
NFLUENCE DU CODAGE DU RELIEF ET DE L'
EXPERIENCE PROFESSIONNELLE SUR LA COMPREHENSION DUFONCTIONNEMENT CINEMATIQUE D
'
UN ROBOTY. Cartonnet
1. INTRODUCTION
Deux constats ont motivé ce travail. D’une part, on constate une évolution des pratiques de travail en bureau d’études mécaniques. En particulier, depuis 1960, les implications de l’introduction de l’ordinateur dans les services techniques sont nombreuses. D’autre part, l’évolution des recherches concernant le dessin technique pose actuellement les problèmes en terme d’interaction entre trois entités : un sujet qui travaille, la représentation qu’il utilise, la tâche qu’il a à accomplir.
Les objectifs de cette recherche étaient triples. En effet, le problème était posé du point de vue de l’étude des raisonnements, plus généralement des activités cognitives ; du point de vue de la didactique de la Technologie ; et du point de vue du développement industriel.
Premièrement, nous voulions étudier comment un dessinateur-projeteur utilisait, avec plus ou moins d’efficacité, les représentations habituelles (perspective, dessin en projection orthogonale) dans son travail de bureau d’étude. Nous voulions également savoir comment il utiliserait une représentation stéréoscopique, en l’occurrence une photo en relief. En particulier, nous formulions l’hypothèse que ces résultats seraient améliorés lorsqu’il travaillerait avec ce type de représentation, en relief.
Deuxièmement, il est intéressant pour le professeur de Sciences et Techniques Industrielles d’avoir des réponses à ces questions pour choisir les supports les plus adaptés à telle ou telle tâche de construction mécanique, qu’il a à enseigner.
Enfin, le point de vue industriel résultait d’un contrat avec la société CISIGRAPH, qui développe le logiciel de CFAO STRIM 100. Dans la perspective du développement d’un écran en relief, j’étais chargé tout d’abord, de l’étude de faisabilité d’un tel écran. De plus, les questions précédentes devaient montrer l’intérêt réel d’un tel poste de travail, coûteux,
pour les dessinateurs de bureaux d’études. Ensuite, cette recherche devait apporter les premières spécifications d’un tel poste, en termes d’ergonomie cognitive.
Autrement dit, et pour cet exposé, il s’agissait d’éclairer la question suivante : telle ou telle représentation est-elle plus efficace dans telle ou telle tâche de bureaux d’études ? En particulier, les sujets devaient expliquer le fonctionnement cinématique d’un mécanisme industriel : un bras de robot d’assemblage. Pour cela, ils disposaient soit d’un plan en projection, soit d’un dessin en perspective, soit d’une photo en relief.
2. DESCRIPTION DE L’OBJET TECHNIQUE SUPPORT DES EXPERIMENTATIONS.
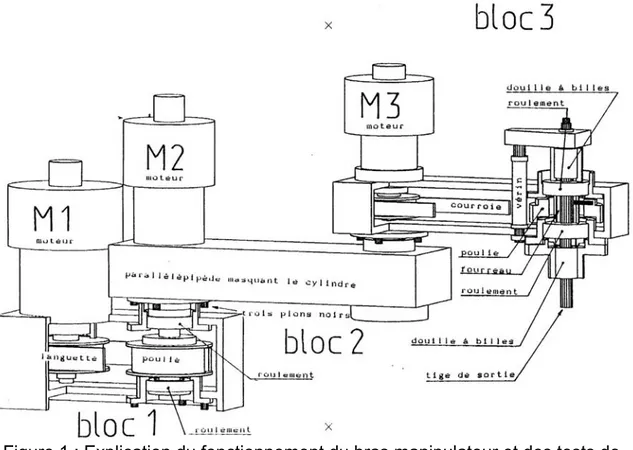
Les explications qui suivent se réfèrent à la figure 1.
Figure 1 : Explication du fonctionnement du bras manipulateur et des tests de cécité stéréoscopique
Fonction globale : le mécanisme qui vous est présenté est un bras manipulateur qui permet de mettre en place des composants électroniques en vue de leur soudure sur une plaque de circuit imprimé.
Description : le manipulateur est constitué de trois parallélépipèdes et d’un poignet. La partie active du poignet est la tige de sortie, sur laquelle vient se fixer la pince de préhension des composants électroniques. Elle n’est pas dessinée ici. Le parallélépipède, nommé bloc 1, en bas à gauche
gauche, c’est-à-dire l’axe de M2 pour la rotation du bloc 2 et l’axe de M3 pour la rotation du bloc 3. Tout à fait à droite, sur le troisième parallélépipède, se trouve la tige de sortie du poignet qui peut tourner sur elle-même, monter et descendre.
Explication des mouvements des parallélépipèdes : la rotation des deux parallélépipèdes (central, bloc 2 et à droite, bloc 3) se fait selon la même chaîne cinématique. Les cylindres tout à fait à gauche, M1 pour le mouvement du bloc 2 et M2 pour le mouvement du bloc 3, représente un moteur électrique et un réducteur de vitesse de type harmonic-drive, (très compact et utilisant la déformation d’une couronne dentée pour réduire la vitesse). Chacun entraîne une poulie, qui entraîne une courroie dentée (représentée partiellement coupée) qui entraîne, enfin, la seconde poulie assemblée au parallélépipède supérieure, lui donnant ainsi son mouvement de rotation. Les guidages sont assurés par des roulements à rouleaux coniques. La même chaîne de mouvement se trouve dans le parallélépipède central et assure la rotation du parallélépipède de droite. Il s’agit de M2 qui assure la rotation du bloc 3.
Explication du mouvement de translation du poignet : le poignet est composé d’une tige verticale qui monte et qui descend grâce à un vérin pneumatique à gauche de la tige.
Explication du mouvement de rotation du poignet : cette tige coulisse à l’intérieur d’un fourreau et lui est lié à une poulie par une goupille. Le système poulies-courroie est le même que précédemment, il se trouve à l’intérieur du troisième parallélépipède, à droite. C’est le moteur M3 qui assure ce mouvement.
Trois raisons expliquent le choix de notre bras manipulateur comme support des tâches expérimentales : la rareté de l’architecture globale du mécanisme, la complexité du mécanisme - au niveau du poignet -, la similitude entre deux chaînes de transmission de puissance.
3. DESCRIPTION DES PRÉ-EXPÉRIMENTATIONS.
Avant d’obtenir les résultats que nous présentons plus loin, il nous a fallu définir des variables d’expérimentation suffisamment discriminatives pour mettre en évidence les phénomènes que nous supposions pouvoir attendre. Nous présentons donc les deux expérimentations préliminaires à celles décrites à partir du paragraphe quatre.
3.1. Première expérimentation.
Lors de cette première expérimentation, nous montrions trois représentations différentes du bras de robot aux élèves d’une classe de terminale F1 (baccalauréat technologique à dominante Génie mécanique). La classe était donc scindée en trois groupes homogénéisés par leurs notes de construction mécanique, en moyenne et en distribution. Le premier
groupe disposait d’une maquette qu’ils pouvaient regarder pendant tout le temps du travail, et manipuler cinq minutes à tour de rôle, ainsi que du plan d’ensemble du robot (figure 2). Le deuxième groupe disposait également de la même maquette qu’ils pouvaient seulement regarder, pendant tout le temps du travail, sans la manipuler ainsi que du plan d’ensemble du robot. Et le troisième groupe n’avait à sa disposition que le plan d’ensemble.
La tâche consistait à reconcevoir le système assurant la montée-descente de la tige de sortie du robot au niveau du poignet. Dans la version qui était présentée aux sujets cette fonction était réalisée par un vérin pneumatique. Il devait le remplacer par la chaîne cinématique suivante : un moteur électrique entraînant un système poulies-courroie entraînant une vis à billes entraînant la tige de sortie. Ce travail était réalisé en huit heures, le même jour, en dehors des heures scolaires pour la moitié.
Les dessins produits par les élèves étaient ensuite notés de façon anonyme. Le premier groupe (vu + touché + plan) a obtenu une moyenne de 13/20, le deuxième (vu + plan) de 5,7/20 et le troisième (plan) de 5,3/20. La différence de moyennes entre le premier et le troisième groupe est significative au seuil de 1 % selon une analyse de la variance. Mais les verbalisations entendues lors du travail permettent de penser, d’une part, que la motivation a joué un rôle important dans les différences obtenues. D’autre part, les élèves ont éprouvé des difficultés à comprendre, initialement, le fonctionnement du robot.
La durée de cette tâche (huit heures, irréalisable en milieu industriel), les difficultés de compréhension du fonctionnement et les interférences entre les deux représentations (plan et maquette) données simultanément nous ont conduit à concevoir la deuxième expérimentation.
3.2. Deuxième expérimentation.
Lors de cette deuxième expérimentation, nous montrions également trois représentations différentes du bras de robot présentant un degré de codage du relief plus ou moins grand (une photo en relief ; une perspective axonométrique et un plan en projection orthogonale, voir leur description au paragraphe 4), aux sujets issus de deux populations : des élèves d’une classe de terminale F1 (baccalauréat technologique à dominante Génie mécanique) et des dessinateurs d’une entreprise de construction d’automobiles. Les élèves étaient donc scindés en trois groupes homogénéisés par leur notes de construction mécanique, en moyenne et en distribution. Les trois groupes de dessinateurs étaient homogénéisés par service d’origine, moyenne d’âge, niveau de formation initiale et nombre d’années d’expérience professionnelle.
La première tâche consistait à comprendre le fonctionnement du bras de robot à partir d’une des trois représentations et d’une explication écrite. Dans la deuxième tâche, les sujets devaient détecter la présence ou non de quatre erreurs nommées, successivement dans trois dessins en projection orthogonale.
Les résultats, la moyenne d’erreurs trouvées sur quatre, ne sont pas significatifs au sens d’une analyse de la variance. Mais les “allures” des résultats en corroborent d’autres obtenus dans la troisième expérimentation.
Pour analyser le manque de significativité des résultats une première cause nous a paru être la différence d’analogie, selon les groupes, entre la représentation initiale donnée pour comprendre le fonctionnement et les représentations à corriger. En effet, un groupe comprenait à partir d’un plan et corrigeait également à partir de plans, ce qui n’était pas le cas pour les autres groupes.
Par ailleurs, une seconde cause semblait être que les services auxquels appartenaient les sujets dessinateurs les prédisposaient à résoudre plus ou moins facilement la tâche de correction. En effet, les sujets du service carrosserie n’avaient que de lointains souvenirs des chaînes cinématiques. Ces considérations nous ont donc amenés à définir la troisième expérimentation dans l’espoir d’obtenir des résultats plus précis et significatifs.
4. DESCRIPTION DES REPRÉSENTATIONS DE L’OBJET.
Toute la suite du texte ne concerne plus que la troisième expérimentation. Nous avons retenu trois représentations, présentant un niveau de codage de la géométrie décroissant :
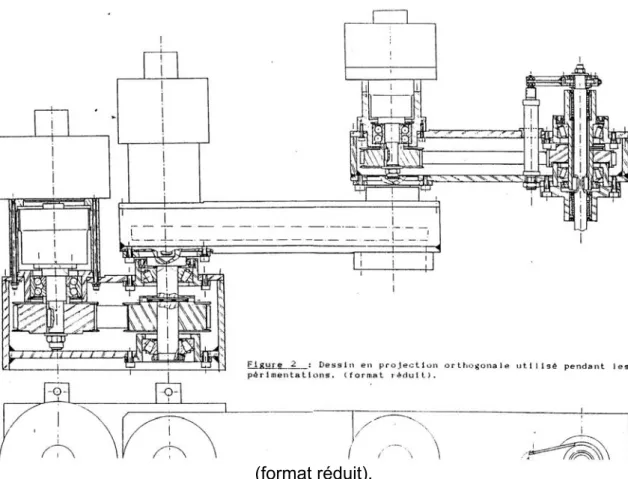
• un plan en projection orthogonale, vue de face et demi-vue de dessus (figure 2). Ce type est normalisé. Il est traditionnel et permettra de construire un groupe contrôle. Nous avons ainsi mesuré les effets des autres types de représentation en rapport avec celle-ci ;
• un dessin en perspective axonométrique, trimétrique non normalisée (figure 3) ; Nous avons choisi ce type parce qu'il est, actuellement, offert facilement par la CAO. Nous avons voulu évaluer l’intérêt réel de ce nouvel outil ;
• une photo en relief qui permet une vision autostéréoscopique de l’objet. Autostéréoscopique signifie ici que l’on obtient une vision en relief sans accessoires : lunettes, casque, etc. C’est-à-dire que l’on voit “dans” la photo, comme un hologramme de l’objet. L’importance de la maquette dans les tâches de conception justifie que les outils CAO veuillent proposer des écrans autostéréoscopiques.
(format réduit).
Figure 2 : Dessin en projection orthogonale utilisé pendant les expérimentations
Figure 3 : Dessin en perspective axonométrique utilisé pendant les expérimentations (format réduit).
Cette modalité de représentation devait donc permettre, dans le cadre d’un contrat avec la société CISIGRAPH, de participer à la définition des spécifications d’un tel poste de travail.
Le degré de codage du relief était donc le premier facteur dont nous voulions étudier l’influence.
5. DESCRIPTION DES TÂCHES EXPÉRIMENTALES
Nous avons voulu répondre à la question suivante : le sujet comprend-il différemment le fonctionnement du bras manipulateur selon le mode de représentation (son degré de codage du relief) du mécanisme qu’on lui propose ?
Mais cette tâche, comprendre le fonctionnement cinématique, étant elle-même encore complexe, il pouvait y avoir des réussites partielles. Si on ne les avait pas prises en compte, on pouvait amalgamer les sujets qui auraient tout fait faux, à ceux qui auraient compris une partie du problème. Nous avons donc décomposé le résultat final. C’est pourquoi nous proposions quatre tâches successives aux sujets :
1°) la reconnaissance du mécanisme : il devait le nommer.
2°) l’expression des mouvements possibles : ils devaient également les nommer, sans expliquer leur fonctionnement. On mesurait alors la performance par une note sur quatre, car, comme on l’a vu, quatre mouvements sont possibles.
3°) l’identification de composants classiques : ils devaient en montrer explicitement huit (deux roulements, deux systèmes poulies-courroie, trois moteurs électriques, un vérin pneumatique), avec le doigt, sur la représentation dont ils disposaient. On donnait une note sur huit, selon le nombre de composants reconnus.
4°) l’explication technologique des mouvements : ils devaient expliquer précisément le fonctionnement des différentes chaînes cinématiques. On donnait, comme au 2°), une note sur quatre.
6. DESCRIPTION DES POPULATIONS.
Nous pensions a priori que l’expérience professionnelle aurait une influence sur la capacité à décoder un plan. Par conséquent, deux populations différentes ont participé à cette expérimentation.
D’une part, nous avons travaillé avec des dessinateurs de bureaux d’études d’une entreprise de construction d’automobiles. Au total, 45 dessinateurs ont collaboré à notre recherche. Nous avions homogénéisé les groupes avec trois variables étiquettes. Tout d’abord, la moyenne d’âge des sujets : elle était d’environ 36 ans dans chaque groupe. Le deuxième facteur était les services d’origine des sujets, dans l’entreprise. Il y avait, dans chaque groupe, le même nombre de sujets d’un même service. Enfin, le troisième facteur est le niveau d’étude maximum atteint par les sujets.
Chaque groupe était constitué de 8 sujets ayant une formation d’un niveau de deux ans après le baccalauréat et 7 d’un niveau avant le baccalauréat.
D’autre part, nous avons employé 96 élèves de quatre classes de seconde, option Technologie des Systèmes Automatisés (TSA) et Productique d’un lycée, donc trois groupes de 32 sujets chacun. Les groupes ont été homogénéisés, selon l’enseignant et le niveau scolaire des élèves (moyenne sur 20) obtenu avec l’enseignant. Chaque groupe comportait donc le même nombre d’élèves ayant un enseignant donné, avec la même distribution et la même moyenne de notes en Technologie des Systèmes Automatisés. Chaque groupe comportait également le même nombre de redoublants.
7. PRÉSENTATION DES RÉSULTATS.
Nous indiquons ici les résultats obtenus pour chaque tâche, dans l’ordre d’accomplissement du travail. On verra que les trois groupes obtiennent des scores différents. Mais ces différences ne sont pas toujours assez marquées pour qu’on puisse les imputer aux facteurs “représentation”, ou “expérience professionnelle”, plutôt qu’au hasard. Pour trancher, on utilise un outil statistique : l’analyse de la variance. Il permet de quantifier le risque d’erreur lorsqu’on attribue les différences de performance aux facteurs manipulés plutôt qu’au hasard. On admet un effet du facteur manipulé lorsque ce risque est inférieur à 1 % ou à 5 %. On note alors p < 0.01 ou p < 0.05. Les points reliés par un trait fort représentent des valeurs dont la différence est significative à p < 0.01. Et les points reliés par un trait en pointillé représentent des valeurs dont la différence est significative à p < 0.05. En conséquence, les points qui ne sont pas reliés ne représentent pas de valeurs dont la différence soit significative.
La tâche de reconnaissance du mécanisme n’a pas donnée de résultats “forts”. Nous la passerons donc sous silence ici. Les lecteurs intéressés se rapporteront au texte complet de la thèse. Nous donnons les résultats concernant les trois autres taches dans le paragraphe 5.
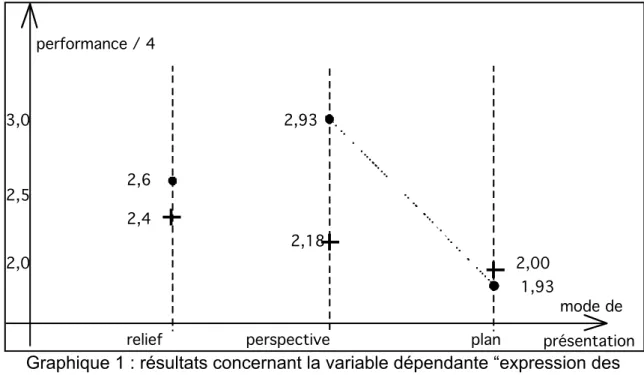
7. 1. L’expression des mouvements possibles.
Au vu des résultats et du traitement statistique, on constate que globalement, pour tous les sujets confondus, la modalité de représentation a une influence sur l’expression des mouvements possibles. Par contre, les comparaisons statistiques groupe à groupe (méthodes contraste et Dunnett) montrent que les dessinateurs reconnaissent mieux les mouvements possibles à partir de la perspective que du plan.
3,0 2,5 2,0 2,6 2,4 2,93 2,18 2,00 1,93 relief perspective plan
mode de présentation performance / 4
Graphique 1 : résultats concernant la variable dépendante “expression des mouvements possibles”
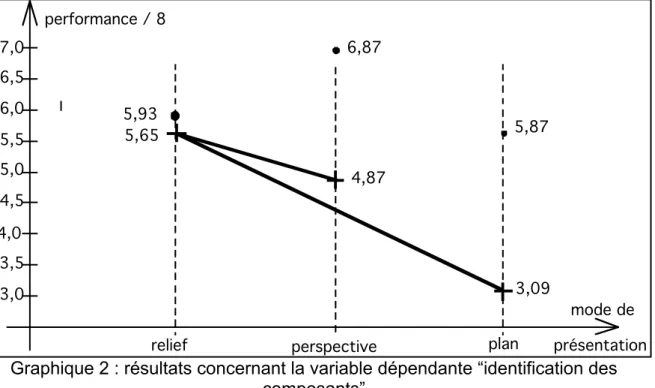
7. 2. L’identification des composants.
On observe que les deux facteurs - degrés de codage de la représentation et l’expérience professionnelle - ont une influence sur les scores obtenus dans cette tache d’identification des composants, avec p < 0.01, dans les deux cas, il parait “dans l’ordre des choses” que les dessinateurs aient des scores significativement meilleurs que les élèves de seconde.
Par ailleurs, il y a une interaction, significative au seuil de 5 %, entre le facteur “représentation” et le facteur “expérience”. Nous pensons que les différences d’influence du codage sur les deux populations ont deux causes.
D’une part, les dessinateurs n’ont pas de problèmes de décodage alors que les élèves en ont ; Cela explique la différence de score pour la modalité de représentation en plan. En cours d’expérimentation, nous avons observé la rapidité avec laquelle les dessinateurs reconnaissaient les roulements à billes et les systèmes poulies-courroie sur le plan, et pas les élèves.
D’autre part, leurs verbalisations spontanées indiquent que les dessinateurs utilisent, d’abord, des règles déductives pour localiser une place probable du composant, puis utilisent leur connaissance de la forme pour conclure. Cela pour les représentations en relief ou en perspective. Cette utilisation des règles déductives, que les élèves n’avaient pas, à ce stade de leur formation, justifie la supériorité du score des dessinateurs, avec la représentation en perspective.
Il n’y a quasiment pas de différence de score entre les populations avec la représentation en relief. Les débutants rejoignent donc les dessinateurs expérimentés avec la représentation en relief. Cela s’explique par le fait que les formes sont directement accessibles aux élèves et qu’ils ont tous vu ses composants juste avant, dans la procédure d’expérimentation.
Enfin, pour les élèves débutants, le relief permet des scores doubles par rapport aux représentations bidimensionnelles, perspective ou plan, avec p < 0.01.
relief perspective plan
mode de présentation performance / 8 3,0 3,5 4,0 4,5 5,0 5,5 6,0 6,5 7,0 5,93 5,65 4,87 6,87 5,87 3,09
Graphique 2 : résultats concernant la variable dépendante “identification des composants”
7.3. L’explication technologique des mouvements possibles.
On constate encore que la modalité de représentation a une influence sue cette variable dépendante. L’expérience n’en a pas de significative, car on remarque que les scores des dessinateurs et des élèves sont très proches. Et il n’y a pas d’interaction entre les deux variables indépendantes.
L’analyse de la variance globale, sur tous les sujets sans distinction par l’expérience, montre que la variable indépendante “mode de représentation” a un effet sur la variable indépendante “explication du fonctionnement”, avec p < 0.01.
Par contre la variable indépendante “expérience professionnelle” n’a pas d’effet significatif.
Par ailleurs, l’analyse statistique sur les seuls groupes d’élèves indique que le groupe ayant utilisé la représentation en relief comprend significativement mieux le fonctionnement que les deux autres groupes. Ce groupe comprend correctement deux mouvements au lieu d’un mouvement pour les autres groupes. Il y a donc une différence entre le mode de représentation tridimensionnel et les deux modes bidimensionnels.
relief perspective plan mode de présentation performance / 4 2,0 1,5 1,0 0,931,09 1,06 1,97 1,8 0,75 Graphique 3 : résultats concernant la variable dépendante “explication
technologique des mouvements”
8. BILAN ET DISCUSSION. On constate donc que :
• Le mode de représentation de la géométrie (codage bidimensionnel ou relief) a globalement pour les deux populations, une influence significative sur les trois tâches d’expression des mouvements.
• L’expérience professionnelle n’a d’effet significatif que sur la tâche d’identification des composants pour laquelle les professionnels sont meilleurs que sur les débutants. En particulier pour la tâche d’explication du fonctionnement, les deux populations obtiennent les mêmes résultats.
• Il y a une interaction entre les deux variables indépendantes pour la tache d’identification des composants. Les élèves et les professionnels ne réagissent donc pas de la même façon. Les dessinateurs identifient mieux les composants que les élèves de seconde, et ce, quel que soit le mode de représentation de l’objet technique, mais l’écart entre les scores va en diminuant du plan au relief. Pour expliquer ces résultats nous formulons trois explications.
Premièrement, deux démarches intellectuelles sont utilisées par les sujets : la projection mnémonique ou le raisonnement hypothético-déductif. Le premier cas signifie qu’à partir d’un élément reconnu, le sujet explique le fonctionnement d’un mécanisme qu’il a en mémoire, mais pas de celui qu’il a sous les yeux. Il projette ce qu’il a en mémoire sur la réalité. Le second cas correspond à la gestion des conflits entre hypothèses explicatives et lecture de la représentation, jusqu’à une explication globale
cohérente. Autrement dit, l’expérience n’aide pas, handicape même, si elle est mal utilisée. Cela peut expliquer que les professionnels ne soient pas meilleurs que les débutants quand il s’agit d’expliquer le fonctionnement.
Deuxièmement, les représentations bidimensionnelles (perspective et plan) nécessitent un décodage du relief par le traitement cognitif des règles de tracé de ces dessins. Au contraire, la photo en relief, ne nécessitant pas ce décodage permettrait un allégement cognitif. Ainsi l’activité cognitive s’appliquant aux connaissances proprement technologiques serait facilitée. La distinction entre le groupe ayant travaillé à partir de la photo en relief et les deux autres groupes se justifie partiellement par cet allégement.
Enfin, troisièmement, cette différence de performances entre « travail tridimensionnel” et « travail bidimensionnel” rend compte d’un autre phénomène. En effet, on peut faire l’hypothèse, que les sujets ne lisent pas le plan, au sens de déchiffrer le code du dessin technique. Autrement dit, les sujets reconnaîtraient le plan en tant qu’objet, c’est-à-dire son titre, ses tracés, plutôt que l’objet représenté par le plan. Ils mettraient en relation la représentation proposée avec des représentations mémorisées antérieurement, mais dans le même niveau de codage. Par exemple, comprendre à partir d’un plan se ferait à l’aide des plans en mémoire, comprendre à partir d’un objet avec les objets vus, comprendre à partir d’une perspective avec les perspectives déjà utilisées, etc. Cela justifie le manque de performance, étonnant à priori, obtenu par les dessinateurs avec la représentation en perspective. En effet, utilisant habituellement peu ce type de représentation, pour l’étude de mécanismes, ils en ont peu en mémoire. C’est donc avec celui-là qu’ils obtiennent les moins bons scores. Par ailleurs, cette démarche, mémoriser la représentation en tant qu’objet, paraît plus économique intellectuellement, donc probable. En effet, étant assuré que la représentation conserve les propriétés de l’objet qui nous intéresse, il est plus facile de travailler sur cette réduction du réel. Plus facile car la représentation est adaptée à la tâche à effectuer. Elle contient les informations nécessaires et suffisantes, permettant le travail sans parasitage. Par exemple, on résout généralement le problème des montages de roulements en travaillant sur le plan d’ensemble d’une machine. Mais si on veut concevoir un montage avec précontrainte, cette représentation n’est plus suffisante. Il faut connaître la géométrie interne des roulements et donc utiliser un dessin du composant roulement comme représentation ad hoc. On peut ainsi éclairer le problème d’habituation pour la Technologie par la notion de couche opérationnelle. Une telle couche se définit par l’association d’une représentation graphique, d’un modèle de calcul et des tâches techniques réalisables en utilisant ces deux éléments.
9. QUANT À LA MODÉLISATION.
Il s’agit de transcrire ici quelques points de la discussion qui a eu lieu à la fin de cet exposé, lors du séminaire. Rappelons tout d’abord que le thème du séminaire était cette année la “modélisation”.
À partir de l’explication précédente définissant la “représentation opérationnelle”, la discussion s’est engagé sur la définition de la notion de modèle.
La première définition du modèle a été la représentation communicable qu’on donne aux sujets pour travailler. C’est le modèle au sens du peintre qui a un modèle. A ce propos, les résultats de la troisième expérimentation font apparaître que les représentations, les modèles n’ont pas tous la même “efficacité” selon la tâche. Nous sommes donc bien dans une problématique triangulaire entre sujet-représentation-tâche plutôt que dans une relation sujet-objet. C’est notre troisième point du paragraphe précédent. Insistons sur le fait que l’objet disparaît au profit d’une de ses représentations, la plus opérationnelle pour un sujet et une tâche données. Par exemple, la perspective semble aider à l’identification de la géométrie mais pas à la compréhension du fonctionnement cinématique. Cela m’a fait dire que dans dix ans la perspective sera systématiquement utilisé. Elle se justifie par son apport à la lecture de la géométrie et la facilité offerte par les système de CFAO pour l’obtention des tracés.
Une seconde approche peut s’envisager en considérant le modèle plutôt comme une représentation mentale. Il permet d’expliquer un phénomène que l’on vit par un modèle théorique que l’on s’est approprié. Par exemple, la chute d’une pierre se “comprend” par le modèle de la gravitation.
Une troisième notion intermédiaire pourrait être discutée : le modèle comme connaissance située, dans une perspective de “cognitivisme situationnel”. Autrement dit, les objets, réels ou représentés, interviennent dans la définition du problème. On ne pense plus le phénomène de compréhension par une distinction entre le concret et le mental. La connaissance n’est pas séparé du contexte présent au moment où le sujet se l’est approprié. Il faut donc une similitude entre le contexte de travail et le contexte d’appropriation du modèle, ou au moins un élément de ce dernier qui sert de déclencheur à l’utilisation cognitive du modèle.
RÉFÉRENCES
ABDI, H. (1987). Introduction au traitement statistique des données
expérimentales. Grenoble : Presses Universitaires de Grenoble.
Anonyme, (1991). Les bureaux d'études et leur équipement, Bureaux d'Etudes, Février 1991, p.18.
AUSSENAC, BESSARD, CARLO, COLLIN & LEBAHAR, (1987). Des erreurs
numérique et des dessins spontanés. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 355-365). Paris : Hermes.
BAL, J.-J., BLANCHARD, M., FLAHAUT, J.-C., JOUANNE, M., KRENKER, D.,
RABARDEL, P. & VERILLON, P. (1987). Utilisation de l'approche
sémiologique pour un enseignement fonctionnel du dessin. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 189-196). Paris : Hermes.
BALDY, R. (1985). La préformation au dessin technique. Une activité de
reconnaissance d'objets dessinés. Technologies Idéologies Pratiques, volume V n°3, (pp 1-2). Publication de l'Université de Provence.
BA L D Y, R. (1987). Difficultés de lecture de dessins de volume en
perspective cavalière. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 131-138). Paris : Hermes.
BALDY, R. & WEILL-FASSINA, P. (1986). Le rôle des différents aspects
moteurs et des représentations construites et utilisées lors de l'exécution et de la lecture de formes graphiques. In Technologies Idéologies Pratiques - actes du colloques "Espace graphique, Dessin technique, CFAO", volumes V, n°4 et Vl. n°1, (pp 75-83).
BAUTHIER, T. (1987). Étude didactique de l'introduction à l'apprentissage de
la perspective conique. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 51-60). Paris : Hermes.
BENDIB, Z., WEILL-FASSINA, P. (1987). Le rôle du dessin dans une tâche de
montage. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 219-226). Paris : Hermes.
BE R T, R., DU P I N I A N, C., JA M B O N, P. & TR A N C H A N T, Y. (1978).
Construction mécanique. Niveau 1, Coll. Hachette Technique. Paris : Hachette.
BESSOT, A. & EB E R H A R D, M. (1987). Représentations graphiques
d'assemblages de cubes et finalités des situations. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 61-70). Paris : Hermes. BEZIER, P. (1986). La conception assistée par ordinateur. Évolution et
perspectives, Actes du colloque "Espace graphique, Dessin technique, CFAO", Aix-en-Provence, 23-24 octobre 1985, Technologies Idéologie Pratiques, volumes V n°4 et VI n°1, p. 1-9.
BHUSHAN, V. (1985). Inférences statistiques. Québec : Les presses de
l'Université Laval.
BONNAULT-CORNU, P. (1980). Lire entre les traits: des plans pourquoi faire
? Technologies Idéologies Pratiques, volume Vl, n° 3-4.
BONNAULT-CORNU, P. (1981). Le traçage des navires, Technologies
Idéologies Pratiques, volume III, n°2-4.
BUSERT, P. & IMBERT, M. (1987). Vision. Hermann.
BRESSON, F. (1987). Les fonctions de représentation et de communication.
In Piaget, Mounoud, Bronckart, Psychologie. Encyclopédie de la Pléiade, p.933-978. Paris : Gallimard .
BROUCHON, M. (1987). Les fonctions de prise d'information et
d'exploration. In Piaget, Mounoud, Bronckart, Psychologie. Encyclopédie de la Pléiade, p.1170-1196. Paris : Gallimard .
BRUNER, J.S. (1986). On cognitive growth. In Studies in cognitive growth.
New York : Wiley.
CARELLA, S. (1987). Simuler les phénomènes pour éviter essais et
prototypes, Les Echos Industrie, Mai 1987, p.15.
CARRON-PARGUE, J. (1987). Une approche ce la genèse de la production
graphique. Le dessin du parallélépipède. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 35-42). Paris : Hermes.
CARTONNET, Y. (1984). Réalisation d'une base de connaissances afin de
générer par système expert les gammes d'usinage des pièces découpées pliées, Rapport de stage chez Merlin Gerin. Grenoble.
CARTONNET, Y. (1988). Étude expérimentale de l'influence des
sensori-motricités sur les productions professionnelles des dessinateurs en conception mécanique, DEA de Psychologie, Aix en Provence, Université de Provence.
CARTONNET, Y. (1990). Avez-vous la télévision ? La vidéo pour le cours de
Technologie, Technologies et Formations, n°29, p.12-14.
CATHERIN & MESSIER-BUGATTI (1992). La communication Études/
Méthodes séduit Boeing, Bureaux d'études et Automatisme, n°78, p.12-15.
CHABAL, J. (1986). Dessin technique et schématisation, Technologies
Idéologies Pratiques, Volume V n°3, p.93-115.
CHAUVIERE, M. (1978). Les systèmes autostéréoscopiques. In La télévision
en relief, Éditions Techniques et scientifiques Françaises, p.37-59. CHEVALIER, A. (1989). Guide du dessinateur industriel. Paris : Éditions
Hachette1969, Réédition .
Collectif (1990). Aide-mémoire de dessin de construction. Éditions Breal, 1984, 1990.
DAVIES, T.-N. (1985). An analysis of the depth cues in Technical Graphics,
Le Travail Humain, Vol 48, n°4.
DEBAECKER, H. (1991). CAO, DAO calcul, optimisation, faire du neuf avec
du vieux, Bureaux d'Etudes, n°68, Mars, p.18.
DEFORGE, Y. (1975). Recherches sur le dessin technique et la construction,
Recherche Pédagogique, n°73, INRDP.
DEFORGE, Y. (1976). Le graphisme technique. Thèse de Doctorat D'État.
DEFORGE, Y. (1985). Les rapports entre système de production et système
d'acquisition, Technologies Idéologies Pratiques, Volume V n°3, p.185-208.
DENIS, M. (1989). Image et cognition. P.U.F., Collection Psychologie
d'aujourd’hui.
DEREGOWSKI, J.B. & DZIURAWIEC, S. (1987). The effect of subject's
sophistication on responses to spatial tasks. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 79-84). Paris : Hermes.
DJANG, S. (1937). The role of past experience in the visual apprehension of
masked forms, Journal of Experimental Psychology, n°20, p. 29-59. DO L L E, J.-M. (1987). Réflexions épistémologiques concernant la
représentation graphique de l'espace tridimensionnel. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 19-27). Paris : Hermes.
DR O Z, R. (1987). Les conduites de l'enfant. Les fonctions e prise
d'information et d'exploration. In Piaget, Mounoud, Bronckart, Psychologie. Encyclopédie de la Pléiade, p. 616-649. Paris : Gallimard .
DZIURAWIEC, S. & DEREGOWSKI, J.B. (1987). Investigation of perception of
stationary and moving geometral figures. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 85-92). Paris : Hermes.
EVARTS, E. (1981). Les mécanismes cérébraux du mouvement. In Le
cerveau, Bibliothèque Pour la Science. Diffusion Belin.
FA B R E, J.M. (1992). Cours de statistiques : analyse de variance et
formulaire statistique, Documents polycopiés. Université de Provence. FASSINA, A. (1963). Un intermédiaire dans le système homme-travail : le
dessin technique ; lecture et écriture de schémas explicatifs, Thèse, Paris IX.
FOCUS, (1969). Encyclopédie internationale, Volume médecine/santé, (pp
293-296).Paris : Bordas.
FO N T A I N E, R. (1949). Cours de dessin industriel. Paris : Librairie
Polytechnique Ch. Beranger.
FOUET, J-M. (1984). Notes personnelles (non publiées) d'un séminaire sur
les systèmes experts à l'École Normale Supérieure de Cachan, Cours de Maîtrise, .
GEMINARD (1987). Les Finalités et objectifs généraux de l'éducation
technologique comme .élément de la culture générale, Culture Technique, n°17, 276-279.
GE O R G E S, Y & Higele, P. (1987). Diagnostic et apprentissage des
opérations projectives. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 149-156). Paris : Hermes.
GU I L L E R M A I N, H. (1987). Approche cognitive de la genèse de la
représentation graphique en perspective. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 43-50). Paris : Hermes.
HAGEN, A. (1986). Varities of Realism. Cambridge : University Press.
HAGEN, A. (1987). The irrelevance of realism, in CAD/CAM/CAE
displays. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 219-226). Paris : Hermes.
HAMON, J. (1971). La description numérique des surfaces de carrosserie au
niveau du style ..., Ingénieurs de l’automobile , Octobre 1971.
HOC, J.-M. & NGUYEN-XUAN, A. (1987) Les modèles informatiques de la
résulution de probléme. In Piaget, Mounoud, Bronckart, Psychologie. Encyclopédie de la Pléiade, p. 1713-1752. Paris : Gallimard .
HUBEL, D. & WIESEL, T. (1981). Les mécanismes cérébraux de la vision. In
Le cerveau, p. 90-104. Bibliothèque Pour la Science, Diffusion Belin HUDSON, W. (1967). The sdudy of the problem of pictorial perception
among unacculturated groups, International Journal of Psychology, p. 89-107.
JACOMI, B. (1990). Une histoire des techniques. Editions Points, collection
Points sciences.
JOURDAN, L., PERRIN, J., PR A T, D. & FRANCHI, J-P. (1987). TSA, les
systèmes techniques. collection Jourdan, Dunod.
KEITA, B. ; La perspective dans le dessin d'étudiant en physique. In P.
Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 2251-257). Paris : Hermes.
KW A S N Y, N. (1987). Modélisation d'un automatisme: pensez aux
maquettes, Bureaux d' Etudes et Automatismes, n°35.
LARGE, D. (1992). La métamorphose de l'ingénieur, Technologie, n°50,
p.11-12.
LEBAHAR, J.-C. (1985). La CAO en architecture: ouverture et/ou réduction
du champ des possibles, Communication à l'association MICADO, Fevrier-Mars 1985.
LEBAHAR, J.-C. (1986). Le travail de conception en architecture, Le Travail
Humain, tome 49, n°1, p.17-30.
LEBAHAR, J.-C. (1987). Quelques aspects significatifs de la compétence
graphique des techniciens sur machines-outils à commande numérique en situation de formation. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 367-376). Paris : Hermes.
L'ETANG, C. (1986). Le systéme CETIM PMG pour classer les pièces
mecaniques, bulletin CETIM-Information ”, n°97, Octobre, p.1-10. LEVI-SCHOEN, A. & FINDLAY, J.M. (1985). Les codages spatiaux dans
l'ajustement des mouvements des yeux. In Paillard (Ed), La lecture sensorimotrice et cognitive de l'expérience spatiale. Directions et distances, Collection Comportement, p.23-43. Paris : CNRS.
LIPSITT, L. & MUSTAINE, M. (1987). Les processus sensoriels. In Piaget,
Mounoud, Bronckart, Psychologie. Encyclopédie de la Pléiade, (pp. 316-360). Paris : Gallimard
LIVINGSTONE, M. (1988). Art, illusion et système visuel, Pour la Science,
Mars 1988, p.44-53.
MARRAUD, A. & BONNET, M. (1979). Images en relief` et films gaurffrés,
Science et connaissance, p. 77-81.
MERAUD, J-P. (1987 & 1988). La représentation graphique au service de la
communication technique, Technologie et Formation, n° 15 & n°16. MERCHIER, J. (1986). Dessin technique et inrformatique. Actes du colloque
"Espace graphique, Dessin technique, CFAO", Aix-en-Provence, 93-24 octobre 1985, Technologies Idéologies Pratiques, volumes V n°4 et Vl n°l, p. 37-43.
MEUNIER, J. (1971). Application de la commande numérique en carosserie,
Ingénieurs de l'Automobile, Octobre, p.575-580.
MONFRAIS, B. (1986). Le dessinateur et l'image. Actes du colloque "Espace
graphique, Dessin technique, CFAO", Aix-en-Provence, 23-24 octobre 1985, Technologies Ideologies Pratiques, volumes V n°4 et VI n°1, p. 61-62.
NAUTA, W. & FEIRTAG, M. (1981). L'organisation du cerveau, in Le
cerveau, Bibliothèque Pour la Science, Diffusion Belin, p. 52-65.
PAILHOUS, J. (1987). Les fonctions d'organisation des conduites et des
données. In Piaget, Mounoud, Bronckart, Psychologie. Encyclopédie de la Pléiade, (pp. 903-929). Paris : Gallimard .
POITOU, J.-P. (1984). L'évolution des qualifications et des savoir-faire dans
les bureaux d 'études face à la conception assistée par ordinateur, Sociologie du travail, 4-1984, p.468-481.
POITOU, J.-P. (1988). Le cerveau du navire. La conception assistée par
ordinateur à la Seyne et la Ciotat. Recherche historique et psycho-sociologique sur deux bureaux d'études de la construction navale de la façade méditerranéenne.Technologies Ideologies Pratiques microédition, 174p., Recherche sous aide du MRT n°86.D.0084 MRT. POITOU, J.-P. (1989a). 30 ans de CAO en France. Paris : Hermes.
POITOU, J.-P. (1989b). Etude d'un système tridimensionnel en reliet par
ordinateur. Compte-rendu de fin d'étude d' une recherche financée par le Ministère de la Recherche et de l'Enseignement supérieur, Décision d'aide n°87 P 0401.
PREVOST, J. (1992). Incidence de l'informatique sur la formation à la
conception/construction en mécanique dans le second cycle de l'Education nationale, Technologie, n°50.
RABARDEL, P. (1980). Contribution à l'étude de la lecture du dessin
technique. Thèse de 3ème cycle, Paris : INRP-HESS.
RABARDEL, P. (1982a). Influence des représentations préexistantes sur la
lecture du dessin technique, Le Travail Humain, n°2.
RABARDEL, P. (1982b). La lecture du dessin technique. Approches
expérimentales et hypothèses, Cahiers de psychologie cognitive, Volume 2, n 34.
RABARDEL, P., NEBOIT, M. & LAYA, O. (1985). Les strategies visuelles
dans la lecture du dessin technique: effet des objets représentés et de la compétence des sujets, Le Travail Humain, Tome 48, n°4.
RABARDEL, P. (1986). Recherche en psvchologie et didactique du dessin
technique, Actes du colloque "Espace graphique, Dessin technique, CFAO", Aix-en-Provence, 23-24 octobre 1985, Technologies ldéologies Pratiques, volume V n°4 et VI n°1, p. 111-115.
RABARDEL, P. (1989). Recherche en Psychologie et en Didactique : un
exemple d'interactions dans l’enseignement du dessin tecnnique, Revue Française de Psychologie, n°89, p. 55-62.
RABARDEL, P. & VERILLON, P. (1987). Approches fonctionnelles du dessin
technique. Réflexion pour un cadre d’analyse. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 209-217). Paris : Hermes.
RACHEDI, Y. (1987). Modalités d'utilisation des plans dans la construction
d'un ouvrage en maçonnerie. Représentation et planification. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 227-234). Paris : Hermes.
ROBERT, J-M. (1982). Etude expérimentale de la production et de l'écriture
du dessin technique préalable au DAO. Thèse de 3ème cycle en Psychologie, Université René Descartes, Paris 5, Sorbonne.
ROBERT, J.-M. (1986). Etude expérimentale de la production de dessin
technique, Le Travail Humain, tome 49, n°l.
SEAGRIM, G. (1987). Les conduites de l'adulte. In Piaget, Mounoud,
Bronckart, Psychologie. Encyclopédie de la Pléiade, p. 847-895. Paris : Gallimard .
SHEPARD, R. (1990). Minds Sights. New York : W. H. Freemalland
Company. (Disponible en Traduction française sous les références: L'oeil qui pense. Visions, illusions, perceptions. Paris : Editions Seuil, Collection Science Ouverte).
SIMONDON, G. (1958). Du mode d'existence des objets techniques. Paris :
Editions Montaigne.
SPENCER, J. (1965). Experiments on engineering draving comprehension,
Ergonomics, vol. 8, pp. 93-110, .
SPENCER, J. & CHENEY, R.L. (1976). A study of dimension layout for
SPENCER, J., CAD (1987). as an aid to visualisation. In P. Rabardel & P.
Weill-Fassina (Eds), Le dessin technique. Paris : Hermes.
THOMSON, R. (1967). Reading exercices in Engineering Dravings. London :
T. Nelson.
TSCHOCHNER, H. (1957). Construire et réaliser. Paris : Editions Eyrolles.
VERILLON, P.& RABARDEL. P. (1987). L'intériorisation du systéme projectif
du dessin technique. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 109-117). Paris : Hermes.
VERMERSCH, P. (1985). Langage de la tâche et langage de l'activité. Actes
du colloque "Espace graphique, Dessin technique, CFAO", Aix-en-Provence, 23-24 octobre 1985, Technologies Ideologies Pratiques, volumes V n°4 et VI n°l, p. 125-134.
VERMERSCH, P. & WE I L L-FA S S I N A, A. (1985). Les registres de
fonctionnement cognitifs: application à l'étude des conduites de lecture et d’écriture du dessin technique élémentaire, Le Travail Humain, tome 48, n°4, p. 331-340.
WEILL-FASSINA, A. (1973). La lecture du dessin industriel : perspectives
d'étude, Le Travail Humain, 36, 1, p. 121-140.
WEILL-FASSINA, A. & RA B A R D E L, P. (1985). Le dessin technique. Un
instrument graphique de pensée et de communication professionnel : points de repère, Le Travail Humain, tome 48, n°4, p.301-330.
WEILL-FASSINA, A. & VERMERSCH, P. (1985). Un diagnostic opératoire
dans des tâches élémentaires de lecture de forme en dessin industriel : les cohérences des modalités de fonctionnement, Le Travail Humain, tome 48, n°4, p. 341-348.
WEILL-FASSINA, A., VERMERSCH, P. & ZOUGGARI, G. (1987). L’évolution
des compétences dans la lecture des formes élémentaires présentées en vues orthogonales. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 101-108.). Paris : Hermes.
WITTLING, M. De BODINAt, G. & RA O U, B. (1987). Génèse de la
perspective spontanée. Etude génétique et expérimentale. In P. Rabardel & P. Weill-Fassina (Eds), Le dessin technique, (pp 29-34). Paris : Hermes.