Rapid and adaptative mission planner for multi-satellite missions using a self-adaptative multi-agent system
Texte intégral
Figure



Documents relatifs
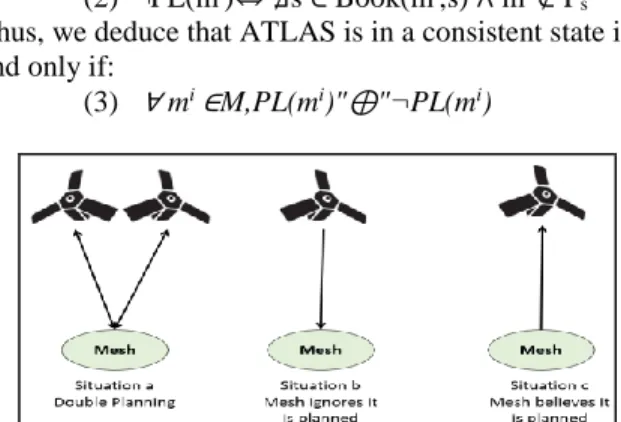
Thus, we design ATLAS (Adaptive saTellite pLanning for dynamic eArth obServation), an adaptive multi-agent system to dynamically plan missions of constellations of satellites..
To this end, when it receives a message from one of its inputs informing it of a value change, a model agent recalculates the outputs val- ues of its model and informs its output
VEN Virtual Enterprise Node Information’s flow Material’s flow Information’s flow Information’s flow Material’s flow Material’s flow Downstream Tier j-1 Tier j Upstream Tier
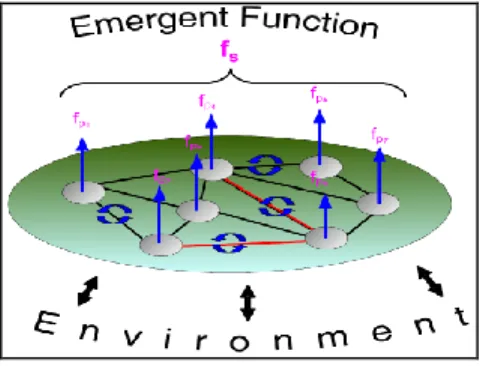
In the presented work, we propose to use adaptive multi-agent systems to plan missions for a constellation of Earth observation satellites in near real-time.. This
To present a SoS architecting methodology based on cooperation, we propose a decentralized decision algorithm using the AMAS (Adaptive Multi-Agent System) approach.. In this
A socio-cognitive concept, conviviality is concerned with agent interactions, and frequently used in social sciences and applications of multi-agent systems in which artificial
Finally, this section explores how my and my collaborators’ previous work on developing privacy systems for the CloudThink platform may be used to address vehicle owners’ concerns
Figure 6 shows that the propeller thrust and torque coefficients and propulsive performance remained approximately the same for 20° (Port) and –20° (Starboard) static azimuth
