Multi-satellite mission planning using a self-adaptive multi-agent system
Texte intégral
Figure

Documents relatifs
Fall avoidance and PS are guaranteed together in a single MPC scheme for biped robots combining the conservative model that anticipates the motion of people ( 18 ) and the constraint
51 Institute for Nuclear Research, Academy of Sciences, Moscow, Russia 52 Institute for Subatomic Physics of Utrecht University, Utrecht, Netherlands 53 Institute for Theoretical
coordination could explain the VC in fluence on the perform- ances of the graphite secondary batteries with an ionic-liquid- based electrolyte since (i) the di ffusion coefficient of [Li
Figure 6 shows that the propeller thrust and torque coefficients and propulsive performance remained approximately the same for 20° (Port) and –20° (Starboard) static azimuth
This work is dedicqted to the design of a SFCW/SFMCW GPR (stepped frequency modulated continuous wave ground penetrating radar) system designed specifically and exclusively
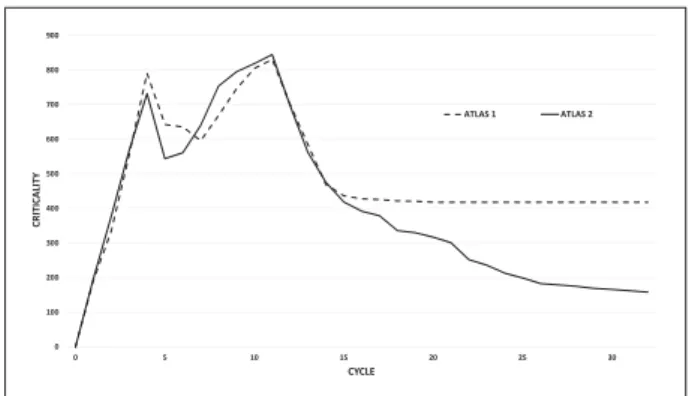
Thus, we design ATLAS (Adaptive saTellite pLanning for dynamic eArth obServation), an adaptive multi-agent system to dynamically plan missions of constellations of satellites..
Indeed, homozygous mutant mice in which Ser187 of SNAP-25 is substituted with Ala display an altered emotional behavior ( Kataoka et al. 2011 ), while repla- cement of the
To this end, when it receives a message from one of its inputs informing it of a value change, a model agent recalculates the outputs val- ues of its model and informs its output
